JP4444005B2 - 半導体力学量センサ - Google Patents
半導体力学量センサ Download PDFInfo
- Publication number
- JP4444005B2 JP4444005B2 JP2004163630A JP2004163630A JP4444005B2 JP 4444005 B2 JP4444005 B2 JP 4444005B2 JP 2004163630 A JP2004163630 A JP 2004163630A JP 2004163630 A JP2004163630 A JP 2004163630A JP 4444005 B2 JP4444005 B2 JP 4444005B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode portion
- movable electrode
- support substrate
- beam structure
- capacitance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Pressure Sensors (AREA)
Description
図10に、特許文献1に記載のSOI基板を用いた容量式加速度センサを示す。支持基板100上において梁101a,101b,101c,101dにより可動電極部(重り部)102が連結支持されている。梁101a,101b,101c,101dは、卍形状であり、可動電極部102は基板の表面に垂直なZ軸方向に変位する。加速度は、支持基板100と可動電極部102間の容量変化から検出する。この場合には外乱(ノイズ)の影響を受け易い。
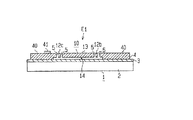
本実施形態では、差動容量式の半導体加速度センサに具体化している。図1には半導体加速度センサの平面図を示す。また、図2に図1におけるA−A線での縦断面を示す。図3に図1におけるB−B線での縦断面を示す。このセンサは、基板の表面に垂直な方向(直交する方向)に加わる加速度を検出するセンサである。
まず、図5(a)に示すように、ウエハ状のSOI基板1を用意する。そして、薄膜シリコン層4の上にフォトリソグラフィ技術及びエッチング技術を利用して電極パッド16,26,33,41(図1参照)を形成する。
即ち、第1及び第2の容量C1,C2が等しい場合、図7のタイミングチャート中のタイミングT1においては、第1の梁構造体10での電極にVcc(例えば5ボルト)、第2の梁構造体20での電極に0ボルトの電圧がそれぞれ印加されることになる。このときには、スイッチ要素53がオンされるため、スイッチドキャパシタ回路50からの出力電圧VoはVcc/2になる。
Vo=C3・(C1−C2)・Vcc/(C1+C2+C3+C4)/Cf
となる。ただし、Cfはスイッチドキャパシタ回路の帰還容量である。
センサ出力電圧Voは、
Vo=(C1−C2)・Vcc/Cf
となる。
このようにして、第1のコンデンサ構成部E1での梁構造体10の可動電極部13と第2のコンデンサ構成部E2での梁構造体20の可動電極部23とが同一方向に動き、発生した容量差(C1−C2)を検出するとともに、第3のコンデンサ構成部E3を介して上記容量差(C1−C2)が取り出される。
図8においては、第1のコンデンサ構成部E1(第1の梁構造体10)と第3のコンデンサ構成部E3(信号取出用対向電極部30)との間、および、第2のコンデンサ構成部E2(第2の梁構造体20)と第3のコンデンサ構成部E3(信号取出用対向電極部30)との間にシールド層が無い。この場合には、図9に示すように、可動電極部13と信号取出用対向電極部30の間に寄生容量C10が形成されるとともに、可動電極部23と信号取出用対向電極部30の間に寄生容量C11が形成される。そして、この寄生容量C10,C11の容量値が変化するためセンサ出力誤差の要因となってしまう。これに対し、本実施形態においては図1および図4に示すように可動電極部13と信号取出用対向電極部30との間、および、可動電極部23と信号取出用対向電極部30との間に寄生容量が形成されずセンサ出力誤差を小さくすることができる。
SOI基板1において第1のコンデンサ構成部E1と第2のコンデンサ構成部E2と第3のコンデンサ構成部E3とがワンチップ化されている。第1のコンデンサ構成部E1での第1の梁構造体10の可動電極部13には搬送波電圧が印加され、また、第2のコンデンサ構成部E2での第2の梁構造体20の可動電極部23には逆相の搬送波電圧が印加される。そして、第1のコンデンサ構成部E1の可動電極部13と第2のコンデンサ構成部E2の可動電極部23とが加速度の作用により支持基板2の表面に直交する方向に変位する。これにより、第1のコンデンサ構成部E1における可動電極部13と支持基板2との間の容量C1が変化するとともに、第2のコンデンサ構成部E2における可動電極部23と支持基板2との間の容量C2が変化する。このとき、第2のコンデンサ構成部E2における可動電極部23と支持基板2との間の容量C2が、第1のコンデンサ構成部E1の可動電極部13の変位による容量C1とは異なる状態で変化する。そしてこの容量差が支持基板2から取り出され、さらに、第3のコンデンサ構成部E3を介して支持基板2から信号取出用対向電極部30に取り出される。よって、差動容量構造を採用することにより外乱(ノイズ)が相殺され、精度よくセンシングすることができる。また、SOI基板1を用い、このSOI基板1での薄膜シリコン層4を区画形成することにより、図11でのポリシリコン層を3層にわたり積層する場合よりも簡単な構成にて差動容量構造とすることができる。
・第1の梁構造体10と第2の梁構造体20とは、支持基板2と薄膜シリコン層4の間の絶縁膜3の材質または厚さを変えることにより加速度(力学量)が作用したときの容量変化を異ならせる。
次に、上記実施形態および他の実施形態から把握できる技術的思想を以下に記載する。
Claims (1)
- 半導体材料よりなる電位がフローティング状態の支持基板(2)の一側面上に絶縁膜(3)を配するとともに該絶縁膜(3)上に薄膜半導体層(4)を配したSOI構造の積層基板(1)にて構成され、
前記薄膜半導体層(4)において第1の梁構造体(10)が区画形成され、第1の梁構造体(10)の可動電極部(13)が共通の固定電極である前記支持基板(2)に対し空隙(14)を介して対向配置され、当該可動電極部(13)に搬送波電圧が印加されながら当該可動電極部(13)が力学量の作用により共通の固定電極である前記支持基板(2)の表面に直交する方向に変位して当該可動電極部(13)と前記支持基板(2)との間の容量が変化する第1のコンデンサ構成部(E1)と、
前記第1のコンデンサ構成部(E1)と共に前記積層基板(1)にワンチップ化され、前記薄膜半導体層(4)において第2の梁構造体(20)が区画形成され、第2の梁構造体(20)の可動電極部(23)が共通の固定電極である前記支持基板(2)に対し空隙(24)を介して対向配置され、当該可動電極部(23)に搬送波電圧が印加されながら当該可動電極部(23)が力学量の作用により共通の固定電極である前記支持基板(2)の表面に直交する方向に変位して当該可動電極部(23)と前記支持基板(2)との間の容量が、前記第1の梁構造体(10)の可動電極部(13)の変位による容量とは異なる状態で変化する第2のコンデンサ構成部(E2)と、
前記第1および第2のコンデンサ構成部(E1,E2)と共に前記積層基板(1)にワンチップ化され、前記薄膜半導体層(4)において信号取出用対向電極部(30)がその下に前記絶縁膜(3)が存在する状態で区画形成され、前記信号取出用対向電極部(30)が前記第1および第2のコンデンサ構成部の固定電極である前記支持基板(2)に対し対向配置される第3のコンデンサ構成部(E3)とを備え、
力学量検出時において力学量の作用により前記各可動電極部(13、23)が変位することで前記第1、第2のコンデンサ構成部(E1、E2)に容量差が生じ、該容量差に基づく前記支持基板(2)の平衡電位からの変化量を前記第3のコンデンサ構成部(E3)を介して前記信号取出用対向電極部(30)に取り出す半導体力学量センサであって、
前記薄膜半導体層(4)よりなり、前記第1の梁構造体(10)の周囲と第2の梁構造体(20)の周囲と信号取出用対向電極部(30)の周囲において区画形成され、前記第1の梁構造体(10)および第2の梁構造体(20)および前記信号取出用対向電極部(30)の周囲を囲む前記グランド電位のシールド層(40)と、
を備えたことを特徴とする半導体力学量センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004163630A JP4444005B2 (ja) | 2004-06-01 | 2004-06-01 | 半導体力学量センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004163630A JP4444005B2 (ja) | 2004-06-01 | 2004-06-01 | 半導体力学量センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005345207A JP2005345207A (ja) | 2005-12-15 |
| JP4444005B2 true JP4444005B2 (ja) | 2010-03-31 |
Family
ID=35497740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004163630A Expired - Fee Related JP4444005B2 (ja) | 2004-06-01 | 2004-06-01 | 半導体力学量センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4444005B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007298407A (ja) * | 2006-04-28 | 2007-11-15 | Matsushita Electric Works Ltd | 静電容量式センサ |
| WO2018163507A1 (ja) * | 2017-03-09 | 2018-09-13 | 三菱電機株式会社 | 電子モジュールおよびパワーモジュール |
| US11279614B2 (en) * | 2019-06-28 | 2022-03-22 | Analog Devices, Inc. | Low-parasitic capacitance MEMS inertial sensors and related methods |
-
2004
- 2004-06-01 JP JP2004163630A patent/JP4444005B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005345207A (ja) | 2005-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3307328B2 (ja) | 半導体力学量センサ | |
| US6990864B2 (en) | Semiconductor dynamic quantity sensor | |
| US8096180B2 (en) | Inertial sensor | |
| JP2007139505A (ja) | 容量式力学量センサ | |
| US7059190B2 (en) | Semiconductor dynamic sensor having variable capacitor formed on laminated substrate | |
| JP4000936B2 (ja) | 容量式力学量センサを有する検出装置 | |
| JP2006084327A (ja) | 容量式力学量センサ装置 | |
| US6848309B2 (en) | Capacitive type dynamic quantity sensor | |
| US6430999B2 (en) | Semiconductor physical quantity sensor including frame-shaped beam surrounded by groove | |
| US9823266B2 (en) | Capacitive physical quantity sensor | |
| JP4444005B2 (ja) | 半導体力学量センサ | |
| US7004029B2 (en) | Semiconductor dynamic quantity sensor | |
| JP4444004B2 (ja) | 半導体力学量センサ | |
| JP3928612B2 (ja) | 半導体力学量センサ | |
| JP4515069B2 (ja) | 半導体力学量センサ | |
| JP4743226B2 (ja) | 半導体力学量センサ | |
| JP4976349B2 (ja) | 静電容量型加速度センサ及び静電容量型加速度計 | |
| JP4893491B2 (ja) | 力学量検出センサ、加速度センサ、ヨーレートセンサ及び力学量検出センサの生産方法 | |
| JP5783201B2 (ja) | 容量式物理量センサ | |
| JPH08136574A (ja) | 半導体容量式加速度センサ | |
| JP2002303636A (ja) | 半導体力学量センサ | |
| JP2005083917A (ja) | 半導体力学量センサ | |
| JP2009063430A (ja) | 2軸静電容量型加速度センサ、及び2軸静電容量型加速度計 | |
| WO2001075457A1 (en) | Acceleration sensor | |
| JP2001121499A (ja) | マイクロマシン構造体および製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070731 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070928 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071213 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20071228 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20080314 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091208 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140122 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |