JP4435480B2 - 改善されたダイレクトモードのブロック予測方法 - Google Patents
改善されたダイレクトモードのブロック予測方法 Download PDFInfo
- Publication number
- JP4435480B2 JP4435480B2 JP2003004236A JP2003004236A JP4435480B2 JP 4435480 B2 JP4435480 B2 JP 4435480B2 JP 2003004236 A JP2003004236 A JP 2003004236A JP 2003004236 A JP2003004236 A JP 2003004236A JP 4435480 B2 JP4435480 B2 JP 4435480B2
- Authority
- JP
- Japan
- Prior art keywords
- picture
- block
- coefficient
- direct mode
- reference picture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/58—Motion compensation with long-term prediction, i.e. the reference frame for a current frame not being the temporally closest one
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Description
【発明の属する技術分野】
本発明は、動画符号化システムに係るもので、詳しくは、Bピクチャにおける改善されたダイレクトモードのブロック予測方法に関する。
【0002】
【従来の技術】
一般に、動画符号化システムにおいて、Bピクチャを利用する最も大きな長所は、オーバーヘッド情報を付加しないダイレクト予測モードを他の予測モード(順方向予測、逆方向予測、両方向予測、イントラ予測等)に比べて多く選択することである。したがって、動画符号化システムは、Bピクチャを利用することで、Pピクチャのみを利用する時より高い符号化効率を得ることになる。
【0003】
このようなBピクチャにおいて、ダイレクトモードのブロック予測方法は、ダイレクトモードのための逆方向参照ピクチャと同一の位置にあるブロックが有する動きベクトルを利用して、ダイレクトモードの順方向動きベクトル及び逆方向動きベクトルを計算し、これら値を利用して動き補償値を得て、最終的に二つの動き補償値を平均演算して予測されたブロックを得る。
【0004】
以下、このようなダイレクトモードのブロック予測方法に対して、図4を用いて説明する。
図4は従来のダイレクトモードのブロック予測方法を説明するためのピクチャパターンを示した図で、図示されたように、本ピクチャパターンは、実際のピクチャ情報のみで符号化されたIピクチャ(図示せず)と、Iピクチャまたは以前のPピクチャを利用して予測されたPピクチャ(P1、P4、P7)と、IピクチャまたはPピクチャを利用して順方向に予測されたBピクチャ(B2、B3、B5、B6)とから構成されている。
【0005】
まず、説明の便宜のために、図4に示された各パラメーターを説明する。
図中、TRDはダイレクトモードのための順方向参照ピクチャ(P1)とダイレクトモードのための逆方向参照ピクチャ(P7)間の時間的距離を示し、TRBはダイレクトモードのための順方向参照ピクチャ(P1)と現在のBピクチャ(B5)間の時間的距離を示し、MVはダイレクトモードのための逆方向参照ピクチャ(P7)と同一の位置にあるブロックが有する動きベクトルを示し、MVfはダイレクトモードのための順方向参照ピクチャ(P1)を利用して求めたダイレクトモードの順方向動きベクトルを示し、MVbはダイレクトモードのための逆方向参照ピクチャ(P7)を利用して求めたダイレクトモードの逆方向動きベクトルをそれぞれ示している。
【0006】
以下、このような各パラメーターを利用して、ダイレクトモードのブロック予測方法に対して説明する。
【0007】
まず、ダイレクトモードの順方向動きベクトル(MVf)は、ダイレクトモードのための逆方向参照ピクチャ(P7)のブロック(Bs)の動きベクトル(MV)及びダイレクトモードのための逆方向参照ピクチャ(P7)が参照する参照ピクチャ、即ち、ダイレクトモードのための順方向参照ピクチャ(P1)を利用し、次式(1)を適用して求める。
MVf=TRB×MV/TRD −−−−−−−−−−−−式(1)
【0008】
そして、ダイレクトモードの逆方向動きベクトル(MVb)は、ダイレクトモードのための逆方向参照ピクチャ(P7)のブロック(Bs)が有する動きベクトル(MV)を利用し、次式(2)を適用して求める。
MVb=(TRB−TRD)MV/TRD−−−−−−−−−−式(2)
【0009】
従って、式(1)及び式(2)のような動きベクトル(MVf、MVb)を利用して動きが補償されたブロック(Bf)(Bb)を求めた後、次式(3)のように平均演算して現在符号化しようとするBピクチャのブロック(Bc)を予測(Bc')する。
Bc’=(Bf+Bb)/2 −−−−−−−−−−−−−−式(3)
【0010】
【発明が解決しようとする課題】
然るに、このような従来のダイレクトモードのブロック予測方法においては、ダイレクトモードのための逆方向参照ピクチャの現在のブロックと同一の位置にあるブロックが有する動きベクトルを利用してダイレクトモードの順方向動きベクトルを求めるため、この値はBピクチャの現在のブロックの正確な動きベクトルにはなれず、近似値に過ぎないという不都合な点があった。
【0011】
且つ、時間的にBピクチャに近い参照ピクチャであるほど、Bピクチャとの類似性が高くなるが、それにもかかわらず、参照ピクチャ間の時間的距離を考慮しないで、単純に各順方向及び逆方向の動きが補償されたブロックの平均でブロック予測をするため、その予測されたブロックの正確度が低下されるという不都合な点があった。
【0012】
特に、フェーディングシーンのある画像では、連続された各Bピクチャの明るさが徐々に暗くなったり、または、反対に明るくなるため、従来の各方向の動きが補償されたブロックを単純に平均して得た予測値は、実際の値と大きな差を示すこととなる。したがって、システム全体の符号化効率が大幅に低下する。
【0013】
本発明は、このような従来の課題に鑑みてなされたもので、ダイレクトモードのための逆方向参照ピクチャと同一の位置にあるブロックが有する動きベクトルを利用してダイレクトモードの順方向動きベクトルを求め、次いで、動きが補償された各ブロック値に対して補間予測を適用して予測されたブロックを得ることで、一層向上した符号化効率を有するダイレクトモードのブロック予測方法を提供することを目的とする。
【0014】
且つ、現在符号化又は復号しようとするBピクチャと類似性の確率が高く、最も近い距離に位置した参照ピクチャを利用してダイレクトモードの順方向動きベクトルを求め、次いで、動きが補償された各ブロック値に対して補間予測を適用して予測されたブロックを得ることで、その予測されたブロックの正確度を高めることができ、一層向上した符号化効率を有するダイレクトモードのブロック予測方法を提供することを目的とする。
【0015】
【課題を解決するための手段】
このような目的を達成するため、本発明に係る改善されたダイレクトモードのブロック予測方法においては、現在符号化又は復号しようとするBピクチャのブロック予測方法において、Bピクチャに対して、現在符号化又は復号しようとするダイレクトモードの順方向及び逆方向動きベクトルを求める第1段階と、その第1段階で求めた順方向及び逆方向の動きベクトルを利用して動きが補償されたブロック(Bf,Bb)を求める第2段階と、その第2段階で求めた動きが補償されたブロックに対して予測補間を適用して、現在符号化又は復号しようとするBピクチャのブロックを予測する第3段階とを順次行うことを特徴とする。
【0016】
【発明の実施の形態】
以下本発明の実施形態について説明する。本実施形態に係るダイレクトモードのブロック予測方法においては、ダイレクトモードのための逆方向参照ピクチャと同一の位置にあるブロックが有する動きベクトルを利用して、ダイレクトモードの順方向動きベクトル及び逆方向動きベクトルを計算し、これら値を利用して動き補償値を得て、最終的に、二つの動き補償値を補間演算して予測されたブロックを得ている。
【0017】
且つ、ダイレクトモードのための逆方向参照ピクチャを利用して逆方向動きベクトルを計算し、現在符号化しようとする順方向参照ピクチャ中、最も近い距離の参照ピクチャを利用してダイレクトモードの順方向動きベクトルを計算し、これら値を利用して動き補償値を得て、最終的に、二つの動き補償値を補間演算して予測されたブロックを得る。
【0018】
図1は、本発明実施形態に係るダイレクトモードのブロック予測方法を説明するためのピクチャパターンを示した図で、図示されたように、本ピクチャパターンは、実際のピクチャ情報のみで符号化されたIピクチャ(図示せず)と、そのIピクチャまたは以前のPピクチャを利用して予測されたPピクチャ(P1、P4、P7)と、IピクチャまたはPピクチャを利用して順方向に予測されたBピクチャ(B2、B3、B5、B6)とから構成されている。
【0019】
説明の便宜のため、図1に示された各パラメーターを先に説明すると、TRDはダイレクトモードのための順方向参照ピクチャ(P1)とダイレクトモードのための逆方向参照ピクチャ(P7)間の時間的距離を示し、TR B はダイレクトモードのための順方向参照ピクチャ(P1)と現在のBピクチャ(B5)間の時間的距離を示し、TRNはBピクチャから最も近い距離にある参照ピクチャ(P4)とBピクチャ間の時間的距離を示し、MVはダイレクトモードのための逆方向参照ピクチャ(P7)が有する動きベクトルを示し、MVf'はBピクチャから最も近い距離にある参照ピクチャ(P4)を利用して求めたダイレクトモードの順方向動きベクトルを示し、MVBはダイレクトモードのための逆方向参照ピクチャ(P7)を利用して求めたダイレクトモードの逆方向動きベクトルをそれぞれ示している。
【0020】
この時、現在符号化しようとするBピクチャのブロック(BC)とダイレクトモードのための逆方向参照ピクチャ(P7)と同一の位置にあるブロック(BS)が有する動きベクトル(MV)は、Bピクチャが符号化又は復号される前に、既にダイレクトモードのための逆方向参照ピクチャを符号化又は復号する過程で求めた値である。
【0021】
以下、このように構成された本発明に係るダイレクトモードのブロック予測方法に対して説明する。
【0022】
まず、順方向参照ピクチャ中、時間的距離が最も近い参照ピクチャを利用して、順方向動きベクトル(MVf')を次式(4)の演算を行って求める。
MVf'=TRN×MV/TRD −−−−−−−−−式(4)
【0023】
そして、ダイレクトモードのための逆方向参照ピクチャ(P7)を利用して、逆方向動きベクトル(MVb)を従来と同様に式(2)の演算で求める。
MVb=(TRB−TRD)MV/TRD −−−−−−式(2)
【0024】
これに従って、式(2)及び式(4)により求めた動きベクトル(MVf'、MVb)を利用して動きが補償されたブロック(Bf,Bb)を求める。
【0025】
一方、Bピクチャの元の画像のブロック(Bc)に対する予測値(Bc')は、動きが補償された二つのブロック(Bf,Bb)を利用して求められる。この時、Bピクチャは、動きが補償されたブロック(Bf)が存在する参照ピクチャと動きが補償されたブロック(Bb)が存在するダイレクトモードのための逆方向参照ピクチャの何れか一つのより近い方のピクチャに位置させることができる。
【0026】
本実施形態に係るダイレクトモードのブロック予測方法は、図4と図1の全てに適用することができるため、前記動きが補償されたブロック(Bf)が存在する参照ピクチャは、ダイレクトモードのための順方向参照ピクチャ(例えば、図4ではP1ピクチャ)またはBピクチャから最も近い参照ピクチャ(例えば、図1ではP4ピクチャ)である。
【0027】
フェーディングシーンのある映像においては、連続されたBピクチャが徐々に暗くなったり、または、反対に明るくなったりする。したがって、従来のように各方向の動きが補償されたブロック(Bf,Bb)を単純に平均して得た予測値は、実際に入力された値と大きな差を示すようになる。これは、符号化効率を大きく低下させる要因になる。
【0028】
これに対して、本実施形態に係るダイレクトモードのブロック予測方法は、ダイレクトモードにより予測されたブロックの正確度を向上させるために、平均演算の代わりに、Bピクチャと動きが補償されたブロック(Bf)が存在する参照ピクチャ(即ち、ダイレクトモードのための順方向参照ピクチャまたはBピクチャから最も近い参照ピクチャ)、そしてダイレクトモードのための逆方向参照ピクチャ間の時間的距離を考慮した補間予測を行う。
【0029】
図2に示されたように、従来ダイレクトモードの順方向動きベクトルを求めた場合、動きが補償されたブロック(Bf)はダイレクトモードのための順方向参照ピクチャ(P1)に存在し、動きが補償されたブロック(Bb)はダイレクトモードのための逆方向参照ピクチャ(P7)に存在するため、次式(5)のような補間予測が実行される。この時、TRDはダイレクトモードのための順方向参照ピクチャ(P1)とダイレクトモードのための逆方向参照ピクチャ(P7)間の時間的距離、TRBはダイレクトモードのための順方向参照ピクチャ(P1)と現在のBピクチャ(B5)間の時間的距離をそれぞれ示したものである。このような補間予測方法は、従来の平均演算も含むことになるが、その場合、Bピクチャは、ダイレクトモードのための順方向参照ピクチャとダイレクトモードのための逆方向参照ピクチャ間の中央に位置する。
Bc'=Bf×(TRD−TRB)/TRD+B b ×TRB/TRD −−−式(5)
【0030】
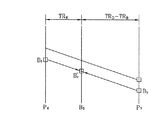
また、図3に示されたように、本発明に係るダイレクトモードの順方向動きベクトルを求める場合、動きが補償されたブロック(Bf)はBピクチャから最も近い参照ピクチャ(P4)に存在し、動きが補償されたブロック(Bb)はダイレクトモードのための逆方向参照ピクチャ(P7)に存在することになって、次式(6)のような補間予測が実行される。この時、TRDはダイレクトモードのための順方向参照ピクチャ(P1)とダイレクトモードのための逆方向参照ピクチャ(P7)間の時間的距離、TRBはダイレクトモードのための順方向参照ピクチャ(P1)と現在のBピクチャ間の時間的距離、TRNはBピクチャから最も近い距離にある参照ピクチャ(P4)とBピクチャ間の時間的距離である。
Bc'=Bf×(TRD−TRB)/(TRN+TRD−TRB)+Bb×TRN/(TRN+TRD−TRB) −−−−−式(6)
【0031】
一方、各ピクチャは、ディスプレー順序情報のピクチャ順序カウンタ値(picture order count)を利用して表現することができる。
【0032】
従って、前記式(5)及び式(6)は、各ピクチャのディスプレー順序情報のピクチャ順序カウンタ値を利用して、次式(7)で表現することができる。この時、Tcは現在のBピクチャに割り当てられたディスプレー順序情報のピクチャ順序カウンタ値、Tfはダイレクトモードのための順方向参照ピクチャに割り当てられたディスプレー順序情報のピクチャ順序カウンタ値または前記式(4)によりダイレクトモードの順方向動きベクトルを求めた場合には、Bピクチャから最も近い参照ピクチャに割り当てられたディスプレー順序情報のピクチャ順序カウンタ値、Tbはダイレクトモードのための逆方向参照ピクチャに割り当てられたディスプレー順序情報のピクチャ順序カウンタ値をそれぞれ示している。
Bc'=Bf(Tb−Tc)/(Tb−Tf)
+Bb(Tc−Tf)/(Tb−Tf) −−−−−式(7)
(T b −T c )+(T c −T f )=(T b −T f )であることから、上記の式(7)によれば、ダイレクトモードの順方向動きベクトルにより動きが補償されたブロックB f の係数である[(T b −T c )/(T b −T f )]が大きくなれば、逆方向動きベクトルにより動きが補償されたブロックB b の係数[(T c −T f )/(T b −T f )]が小さくなり、また、係数[(T b −T c )/(T b −T f )]が小さくなれば、係数[(T c −T f )/(T b −T f )]が大きくなることが理解される。これは、時間的距離が離れ、(T c −T f )または(T b −T c )が大きくなるにつれて、B f またはB b の係数は小さくなり、したがって、B c 'に対するB f およびB b の影響がそれぞれ小さくなることを意味している。
【0033】
【発明の効果】
以上説明したように、本発明は、ダイレクトモードのための逆方向参照ピクチャと同一の位置にあるブロックが有する動きベクトルを利用してダイレクトモードの順方向動きベクトルを求め、次いで、動きが補償された各ブロック値に対して補間予測を適用して予測されたブロックを得ることで、従来のダイレクトモードより一層向上した符号化効率を有するという効果がある
【0034】
且つ、現在符号化又は復号しようとするBピクチャと類似性の確率が高く、最も近い距離に位置した参照ピクチャを利用してダイレクトモードの順方向動きベクトルを求め、次いで、動きが補償された各ブロック値に対して補間予測を適用して予測されたブロックを得ることで、予測されたブロックの正確度を向上させることができ、一層向上され符号化効率を有するという効果がある
【図面の簡単な説明】
【図1】 本発明実施形態に係るダイレクトモードのブロック予測方法を説明するためのピクチャパターンを示した図である。
【図2】 本発明に係る補間予測方法の第1実施形態を説明するためのピクチャパターンを示した図である。
【図3】 本発明に係る補間予測方法の第2実施形態を説明するためのピクチャパターンを示した図である。
【図4】 従来ダイレクトモードのブロック予測方法を説明するためのピクチャパターンを示した図である。
【符号の説明】
P1、P4、P7:Pピクチャ
B2、B3、B5、B6:Bピクチャ
Claims (12)
- 双予測ピクチャにおける現在のブロックの予測方法において、
その現在のブロックに対する第1の動きベクトルと第1の参照ピクチャとを利用して、第1の動き補償されたブロックを得るステップと、
前記現在のブロックに対する第2の動きベクトルと第2の参照ピクチャとを利用して、第2の動き補償されたブロックを得るステップと、
ピクチャ順序カウンタ値を用いて、前記第1の参照ピクチャと前記第2の参照ピクチャとの間の時間的距離および前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離を誘導し、前記誘導した2つの時間的距離に基づいて、第1および第2の係数を計算するステップと、
前記第1および第2の動き補償されたブロックにそれぞれ前記第1および第2の係数を適用することによって、前記現在のブロックを予測するステップと
を有することを特徴とする予測方法。 - 前記予測するステップは、ピクチャのディスプレイ順序を表す前記ピクチャ順序カウンタ値を用いて、前記第1の係数と前記第1の動き補償されたブロックとの第1の積と、前記第2の係数と前記第2の動き補償されたブロックとの第2の積との和を用いて前記現在のブロックを予測する
ことを特徴とする請求項1記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が大きくなると、前記第1の係数は小さくなり、かつ前記第2の係数は大きくなる
ことを特徴とする請求項1記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が小さくなると、前記第1の係数は大きくなり、かつ前記第2の係数は小さくなる
ことを特徴とする請求項3記載の予測方法。 - 前記第1および第2の動き補償されたブロックを得るステップは、
前記第1および第2の動き補償されたブロックに対し予測補間を適用することを含む
請求項1記載の予測方法。 - 前記予測するステップは、前記第1の係数と前記第1の動き補償されたブロックとの第1の積と、前記第2の係数と前記第2の動き補償されたブロックとの第2の積との和を用いて前記現在のブロックを予測する
ことを特徴とする請求項5記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が大きくなると、前記第1の係数は小さくなり、かつ前記第2の係数は大きくなる
ことを特徴とする請求項5記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が小さくなると、前記第1の係数は大きくなり、かつ前記第2の係数は小さくなる
ことを特徴とする請求項7記載の予測方法。 - ダイレクトモードで前記第1および第2の動きベクトルを得るステップをさらに有し、
前記第1および第2の動きベクトルは、前記現在のブロックと同一の位置にあるブロックの動きベクトルから導出される
ことを特徴とする請求項5記載の予測方法。 - 前記予測するステップは、前記第1の係数と前記第1の動き補償されたブロックとの第1の積と、前記第2の係数と前記第2の動き補償されたブロックとの第2の積との和を用いて前記現在のブロックを予測する
ことを特徴とする請求項9記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が大きくなると、前記第1の係数は小さくなり、かつ前記第2の係数は大きくなる
ことを特徴とする請求項9記載の予測方法。 - 前記第1の参照ピクチャと前記双予測ピクチャとの間の時間的距離が小さくなると、前記第1の係数は大きくなり、かつ前記第2の係数は小さくなる
ことを特徴とする請求項11記載の予測方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR2002-19262 | 2002-04-09 | ||
| KR20020019262 | 2002-04-09 | ||
| KR2002-72862 | 2002-11-21 | ||
| KR10-2002-0072862A KR100508798B1 (ko) | 2002-04-09 | 2002-11-21 | 쌍방향 예측 블록 예측 방법 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006000632A Division JP2006180527A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
| JP2006000627A Division JP2006180526A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003319403A JP2003319403A (ja) | 2003-11-07 |
| JP2003319403A5 JP2003319403A5 (ja) | 2005-07-14 |
| JP4435480B2 true JP4435480B2 (ja) | 2010-03-17 |
Family
ID=36734111
Family Applications (11)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003004236A Expired - Lifetime JP4435480B2 (ja) | 2002-04-09 | 2003-01-10 | 改善されたダイレクトモードのブロック予測方法 |
| JP2006000632A Pending JP2006180527A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
| JP2006000627A Pending JP2006180526A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
| JP2008053845A Expired - Lifetime JP4763735B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053953A Expired - Lifetime JP4763738B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053934A Expired - Lifetime JP4763737B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053850A Expired - Lifetime JP4763736B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053897A Withdrawn JP2008172831A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053753A Withdrawn JP2008172828A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053982A Withdrawn JP2008172835A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053958A Expired - Lifetime JP4763739B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
Family Applications After (10)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006000632A Pending JP2006180527A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
| JP2006000627A Pending JP2006180526A (ja) | 2002-04-09 | 2006-01-05 | ブロック予測方法 |
| JP2008053845A Expired - Lifetime JP4763735B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053953A Expired - Lifetime JP4763738B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053934A Expired - Lifetime JP4763737B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053850A Expired - Lifetime JP4763736B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053897A Withdrawn JP2008172831A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053753A Withdrawn JP2008172828A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053982A Withdrawn JP2008172835A (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
| JP2008053958A Expired - Lifetime JP4763739B2 (ja) | 2002-04-09 | 2008-03-04 | ブロック予測方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (8) | US8548053B2 (ja) |
| EP (11) | EP1876837B1 (ja) |
| JP (11) | JP4435480B2 (ja) |
| KR (1) | KR100508798B1 (ja) |
| CN (2) | CN1320824C (ja) |
| DE (4) | DE10300692B4 (ja) |
| GB (2) | GB2387498B (ja) |
| HK (1) | HK1073043A1 (ja) |
| NL (1) | NL1022353C2 (ja) |
| RU (3) | RU2258320C2 (ja) |
| TW (3) | TWI258993B (ja) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6499060B1 (en) | 1999-03-12 | 2002-12-24 | Microsoft Corporation | Media coding for loss recovery with remotely predicted data units |
| SG152047A1 (en) * | 2002-01-18 | 2009-05-29 | Toshiba Kk | Video encoding method and apparatus and video decoding method and apparatus |
| KR100508798B1 (ko) * | 2002-04-09 | 2005-08-19 | 엘지전자 주식회사 | 쌍방향 예측 블록 예측 방법 |
| US7088776B2 (en) | 2002-07-15 | 2006-08-08 | Apple Computer, Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding |
| US6728315B2 (en) * | 2002-07-24 | 2004-04-27 | Apple Computer, Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding with reduced requirements for division operations |
| US8254461B2 (en) * | 2002-07-24 | 2012-08-28 | Apple Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding with reduced requirements for division operations |
| ES2638189T3 (es) | 2002-08-08 | 2017-10-19 | Godo Kaisha Ip Bridge 1 | Procedimiento de descodificación de imágenes en movimiento |
| JP2004179687A (ja) * | 2002-11-22 | 2004-06-24 | Toshiba Corp | 動画像符号化/復号化方法及び装置 |
| US7809059B2 (en) * | 2003-06-25 | 2010-10-05 | Thomson Licensing | Method and apparatus for weighted prediction estimation using a displaced frame differential |
| WO2005004479A1 (en) * | 2003-07-08 | 2005-01-13 | Koninklijke Philips Electronics N.V. | Motion-compensated image signal interpolation |
| US7577198B2 (en) | 2003-09-07 | 2009-08-18 | Microsoft Corporation | Number of reference fields for an interlaced forward-predicted field |
| US8085844B2 (en) * | 2003-09-07 | 2011-12-27 | Microsoft Corporation | Signaling reference frame distances |
| CN1321534C (zh) * | 2003-12-31 | 2007-06-13 | 中国科学院计算技术研究所 | 固定参考帧数编码方式下获取图像参考块的方法 |
| CN1225128C (zh) * | 2003-12-31 | 2005-10-26 | 中国科学院计算技术研究所 | 直接编码模式下确定参考图像块的方法 |
| KR100584603B1 (ko) * | 2004-08-03 | 2006-05-30 | 학교법인 대양학원 | 다시점 영상의 다이렉트 모드 움직임 예측 방법 및 장치 |
| KR100671871B1 (ko) * | 2004-08-31 | 2007-01-19 | 중앙대학교 산학협력단 | 압축영역에서의 움직임 벡터 해석방법 |
| KR20060070400A (ko) * | 2004-12-20 | 2006-06-23 | 엘지전자 주식회사 | 영상 신호의 인코딩 및 디코딩 방법 |
| US8634413B2 (en) | 2004-12-30 | 2014-01-21 | Microsoft Corporation | Use of frame caching to improve packet loss recovery |
| JP2006279573A (ja) * | 2005-03-29 | 2006-10-12 | Sanyo Electric Co Ltd | 符号化装置と方法、ならびに復号装置と方法 |
| KR100746006B1 (ko) | 2005-07-19 | 2007-08-06 | 삼성전자주식회사 | 계층적 구조에 적합하게 시간적 다이렉트 모드로인코딩하며, 디코딩하는 방법 및 장치 |
| MX2008000906A (es) * | 2005-07-21 | 2008-03-18 | Thomson Licensing | Metodo y aparato para la prediccion ponderada para la codificacion escalable de video. |
| KR101227601B1 (ko) * | 2005-09-22 | 2013-01-29 | 삼성전자주식회사 | 시차 벡터 예측 방법, 그 방법을 이용하여 다시점 동영상을부호화 및 복호화하는 방법 및 장치 |
| US8644386B2 (en) | 2005-09-22 | 2014-02-04 | Samsung Electronics Co., Ltd. | Method of estimating disparity vector, and method and apparatus for encoding and decoding multi-view moving picture using the disparity vector estimation method |
| JP5020829B2 (ja) * | 2005-12-27 | 2012-09-05 | シャープ株式会社 | 動画像復号装置および動画像符号化装置 |
| ZA200805337B (en) * | 2006-01-09 | 2009-11-25 | Thomson Licensing | Method and apparatus for providing reduced resolution update mode for multiview video coding |
| KR100818921B1 (ko) * | 2006-01-12 | 2008-04-03 | 삼성전자주식회사 | 모션 벡터 압축 방법, 상기 압축 방법을 이용하는 비디오인코더 및 비디오 디코더 |
| US7711337B2 (en) | 2006-01-14 | 2010-05-04 | Paratek Microwave, Inc. | Adaptive impedance matching module (AIMM) control architectures |
| US9215475B2 (en) * | 2006-02-02 | 2015-12-15 | Thomson Licensing | Method and apparatus for motion estimation using combined reference bi-prediction |
| ZA200900857B (en) | 2006-07-06 | 2010-05-26 | Thomson Licensing | Method and apparatus for decoupling frame number and/or picture order count (POC) for multi-view video encoding and decoding |
| JP2009543462A (ja) * | 2006-07-06 | 2009-12-03 | トムソン ライセンシング | マルチビュービデオ符号化及び復号化のためにフレームナンバー及び/又はピクチャオーダカウント(poc)を分離する方法及び装置 |
| KR101103699B1 (ko) | 2007-02-23 | 2012-01-11 | 니폰덴신뎅와 가부시키가이샤 | 영상 부호화 방법 및 복호 방법, 그들의 장치, 그들의 프로그램 및 프로그램을 기록한 기록매체 |
| KR100955396B1 (ko) * | 2007-06-15 | 2010-04-29 | 성균관대학교산학협력단 | 양-예측 부호화 방법 및 장치, 양-예측 복호화 방법 및장치 및 기록매체 |
| WO2008153262A1 (en) | 2007-06-15 | 2008-12-18 | Sungkyunkwan University Foundation For Corporate Collaboration | Bi-prediction coding method and apparatus, bi-prediction decoding method and apparatus, and recording midium |
| US8619853B2 (en) | 2007-06-15 | 2013-12-31 | Qualcomm Incorporated | Separable directional transforms |
| US8571104B2 (en) | 2007-06-15 | 2013-10-29 | Qualcomm, Incorporated | Adaptive coefficient scanning in video coding |
| WO2009073415A2 (en) | 2007-11-30 | 2009-06-11 | Dolby Laboratories Licensing Corporation | Temporal image prediction |
| WO2009128208A1 (ja) * | 2008-04-16 | 2009-10-22 | 株式会社日立製作所 | 動画像符号化装置、動画像復号化装置、動画像符号化方法、および動画像復号化方法 |
| TWI405469B (zh) * | 2009-02-20 | 2013-08-11 | Sony Corp | Image processing apparatus and method |
| TW201204054A (en) * | 2010-01-14 | 2012-01-16 | Intel Corp | Techniques for motion estimation |
| KR102219985B1 (ko) | 2010-05-04 | 2021-02-25 | 엘지전자 주식회사 | 비디오 신호의 처리 방법 및 장치 |
| KR102233820B1 (ko) * | 2010-05-26 | 2021-03-29 | 엘지전자 주식회사 | 비디오 신호의 처리 방법 및 장치 |
| US9300961B2 (en) | 2010-11-24 | 2016-03-29 | Panasonic Intellectual Property Corporation Of America | Motion vector calculation method, picture coding method, picture decoding method, motion vector calculation apparatus, and picture coding and decoding apparatus |
| US10021384B2 (en) | 2010-12-23 | 2018-07-10 | Samsung Electronics Co., Ltd. | Method and device for encoding intra prediction mode for image prediction unit, and method and device for decoding intra prediction mode for image prediction unit |
| CN106878742B (zh) | 2011-01-12 | 2020-01-07 | 太阳专利托管公司 | 动态图像编解码装置 |
| KR101878008B1 (ko) | 2011-03-03 | 2018-07-13 | 선 페이턴트 트러스트 | 동화상 부호화 방법, 동화상 복호 방법, 동화상 부호화 장치, 동화상 복호 장치 및 동화상 부호화 복호 장치 |
| KR102232113B1 (ko) * | 2011-03-21 | 2021-03-25 | 엘지전자 주식회사 | 움직임 벡터 예측자 선택 방법 및 이를 이용하는 장치 |
| US8934552B2 (en) * | 2011-03-31 | 2015-01-13 | Qualcomm Incorporated | Combined reference picture list construction and mapping |
| JP5768510B2 (ja) * | 2011-06-06 | 2015-08-26 | 富士通株式会社 | 動画像符号化方法および動画像符号化装置 |
| MX2014000159A (es) * | 2011-07-02 | 2014-02-19 | Samsung Electronics Co Ltd | Metodo y aparato para la codificacion de video, y metodo y aparato para la decodificacion de video acompañada por inter prediccion utilizando imagen co-localizada. |
| WO2014047885A1 (en) * | 2012-09-28 | 2014-04-03 | Intel Corporation | Enhanced reference region utilization for scalable video coding |
| CN111193929B (zh) * | 2013-12-16 | 2022-04-12 | 浙江大学 | 一种前向双假设编码图像块的编解码方法和装置 |
| CN111147846B (zh) * | 2014-07-07 | 2022-03-11 | 寰发股份有限公司 | 利用帧内区块复制模式编码的视频编码方法 |
| US10306229B2 (en) | 2015-01-26 | 2019-05-28 | Qualcomm Incorporated | Enhanced multiple transforms for prediction residual |
| US10623774B2 (en) | 2016-03-22 | 2020-04-14 | Qualcomm Incorporated | Constrained block-level optimization and signaling for video coding tools |
| CN114363636B (zh) * | 2016-07-05 | 2024-06-04 | 株式会社Kt | 用于处理视频信号的方法和装置 |
| CN107920254B (zh) * | 2016-10-11 | 2019-08-30 | 北京金山云网络技术有限公司 | 一种针对b帧的运动估计方法、装置及视频编码器 |
| US11323748B2 (en) | 2018-12-19 | 2022-05-03 | Qualcomm Incorporated | Tree-based transform unit (TU) partition for video coding |
| EP3820138A1 (en) * | 2019-11-06 | 2021-05-12 | Koninklijke Philips N.V. | A system for performing image motion compensation |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2530217B2 (ja) | 1989-01-20 | 1996-09-04 | 日本ビクター株式会社 | フレ―ム間予測符号化装置及び復号装置 |
| JPH07109990B2 (ja) | 1989-04-27 | 1995-11-22 | 日本ビクター株式会社 | 適応型フレーム間予測符号化方法及び復号方法 |
| JPH05236454A (ja) * | 1992-02-24 | 1993-09-10 | G C Technol Kk | 画像符号化における動ベクトル検出方法と装置 |
| DE69603587T2 (de) | 1995-03-20 | 2000-03-30 | Matsushita Electric Industrial Co., Ltd. | Vorrichtung und verfahren zur aufnahme bildbetreffender informationen |
| JPH09163376A (ja) | 1995-12-05 | 1997-06-20 | Nippon Telegr & Teleph Corp <Ntt> | 動画像のフレーム間符号化・復号方法および装置 |
| KR100191318B1 (ko) * | 1996-03-26 | 1999-06-15 | 윤종용 | 고속의 동벡터 복호회로 |
| MY118360A (en) * | 1996-04-30 | 2004-10-30 | Nippon Telegraph & Telephone | Scheme for detecting shot boundaries in compressed video data using inter-frame/inter field prediction coding and intra-frame/intra-field coding |
| WO1998036576A1 (en) * | 1997-02-13 | 1998-08-20 | Mitsubishi Denki Kabushiki Kaisha | Moving picture prediction system |
| CN1297147C (zh) * | 1997-03-07 | 2007-01-24 | 通用仪器公司 | 对交错数字视频的双向预测的视频目标平面的预测和编码 |
| US5991447A (en) * | 1997-03-07 | 1999-11-23 | General Instrument Corporation | Prediction and coding of bi-directionally predicted video object planes for interlaced digital video |
| US6404813B1 (en) | 1997-03-27 | 2002-06-11 | At&T Corp. | Bidirectionally predicted pictures or video object planes for efficient and flexible video coding |
| EP0896300B1 (en) * | 1997-08-07 | 2002-01-30 | Matsushita Electric Industrial Co., Ltd. | Device and method for motion vector detection |
| RU2137194C1 (ru) * | 1998-07-15 | 1999-09-10 | Дворкович Александр Викторович | Способ анализа векторов движения деталей в динамических изображениях |
| US6658056B1 (en) | 1999-03-30 | 2003-12-02 | Sony Corporation | Digital video decoding, buffering and frame-rate converting method and apparatus |
| JP2002543714A (ja) | 1999-04-30 | 2002-12-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Bフレーム・エンコーディング・モードを有するビデオ・エンコーディング方法 |
| CN1182726C (zh) | 1999-10-29 | 2004-12-29 | 皇家菲利浦电子有限公司 | 视频编码方法 |
| RU2182727C2 (ru) * | 2000-07-20 | 2002-05-20 | Дворкович Александр Викторович | Способ поиска векторов движения деталей в динамических изображениях |
| JP2004515132A (ja) | 2000-11-23 | 2004-05-20 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ビデオ符号化方法及び対応するエンコーダ |
| US6816552B2 (en) | 2001-07-11 | 2004-11-09 | Dolby Laboratories Licensing Corporation | Interpolation of video compression frames |
| JP2004088722A (ja) | 2002-03-04 | 2004-03-18 | Matsushita Electric Ind Co Ltd | 動画像符号化方法および動画像復号化方法 |
| KR100508798B1 (ko) * | 2002-04-09 | 2005-08-19 | 엘지전자 주식회사 | 쌍방향 예측 블록 예측 방법 |
| CN1689242B (zh) | 2002-10-01 | 2011-09-14 | 汤姆森许可贸易公司 | 视频解码器中参考画面的隐式加权 |
-
2002
- 2002-11-21 KR KR10-2002-0072862A patent/KR100508798B1/ko active IP Right Grant
- 2002-12-31 US US10/335,331 patent/US8548053B2/en not_active Ceased
- 2002-12-31 TW TW091137994A patent/TWI258993B/zh not_active IP Right Cessation
- 2002-12-31 TW TW094135138A patent/TWI280806B/zh not_active IP Right Cessation
- 2002-12-31 TW TW094100142A patent/TWI259412B/zh not_active IP Right Cessation
-
2003
- 2003-01-03 GB GB0300111A patent/GB2387498B/en not_active Expired - Lifetime
- 2003-01-03 GB GB0501570A patent/GB2408889B/en not_active Expired - Lifetime
- 2003-01-09 RU RU2003100072/09A patent/RU2258320C2/ru not_active IP Right Cessation
- 2003-01-10 EP EP07019722A patent/EP1876837B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP03000442A patent/EP1359769B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP05015780A patent/EP1601209B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP07019720A patent/EP1876835B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP07019723A patent/EP1876838B1/en not_active Expired - Lifetime
- 2003-01-10 DE DE10300692A patent/DE10300692B4/de not_active Expired - Lifetime
- 2003-01-10 EP EP07019721A patent/EP1876836B1/en not_active Expired - Lifetime
- 2003-01-10 DE DE10362310A patent/DE10362310B4/de not_active Expired - Lifetime
- 2003-01-10 EP EP06006733A patent/EP1679904B1/en not_active Expired - Lifetime
- 2003-01-10 DE DE10362309A patent/DE10362309B4/de not_active Expired - Lifetime
- 2003-01-10 NL NL1022353A patent/NL1022353C2/nl not_active IP Right Cessation
- 2003-01-10 JP JP2003004236A patent/JP4435480B2/ja not_active Expired - Lifetime
- 2003-01-10 DE DE10362305A patent/DE10362305B4/de not_active Expired - Lifetime
- 2003-01-10 EP EP07019719A patent/EP1876834B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP07019718A patent/EP1876833B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP07019717A patent/EP1876832B1/en not_active Expired - Lifetime
- 2003-01-10 EP EP07019716A patent/EP1876831B1/en not_active Expired - Lifetime
- 2003-01-13 CN CNB2004101045472A patent/CN1320824C/zh not_active Expired - Lifetime
- 2003-01-13 CN CNB03101657XA patent/CN1233175C/zh not_active Expired - Lifetime
-
2005
- 2005-01-26 US US11/042,051 patent/US8548054B2/en active Active
- 2005-01-26 US US11/042,060 patent/US8553773B2/en active Active
- 2005-01-26 US US11/042,083 patent/US8553774B2/en active Active
- 2005-03-29 RU RU2005108920/09A patent/RU2333616C2/ru active
- 2005-03-29 RU RU2005108921/09A patent/RU2297109C2/ru active
- 2005-08-03 HK HK05106691A patent/HK1073043A1/xx not_active IP Right Cessation
-
2006
- 2006-01-05 JP JP2006000632A patent/JP2006180527A/ja active Pending
- 2006-01-05 JP JP2006000627A patent/JP2006180526A/ja active Pending
-
2007
- 2007-03-26 US US11/727,417 patent/US8553775B2/en active Active
-
2008
- 2008-03-04 JP JP2008053845A patent/JP4763735B2/ja not_active Expired - Lifetime
- 2008-03-04 JP JP2008053953A patent/JP4763738B2/ja not_active Expired - Lifetime
- 2008-03-04 JP JP2008053934A patent/JP4763737B2/ja not_active Expired - Lifetime
- 2008-03-04 JP JP2008053850A patent/JP4763736B2/ja not_active Expired - Lifetime
- 2008-03-04 JP JP2008053897A patent/JP2008172831A/ja not_active Withdrawn
- 2008-03-04 JP JP2008053753A patent/JP2008172828A/ja not_active Withdrawn
- 2008-03-04 JP JP2008053982A patent/JP2008172835A/ja not_active Withdrawn
- 2008-03-04 JP JP2008053958A patent/JP4763739B2/ja not_active Expired - Lifetime
-
2013
- 2013-08-21 US US13/972,252 patent/US8902984B2/en not_active Expired - Lifetime
- 2013-08-21 US US13/972,238 patent/US8902983B2/en not_active Expired - Lifetime
-
2015
- 2015-03-26 US US14/669,487 patent/USRE47358E1/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4435480B2 (ja) | 改善されたダイレクトモードのブロック予測方法 | |
| JP2003319403A5 (ja) | ||
| JPH07162869A (ja) | 動画像符号化装置 | |
| JPH10304374A (ja) | 動画像符号化装置 | |
| JP3641172B2 (ja) | ビデオ画像のシーケンス処理方法 | |
| JPH0638194A (ja) | 符号化装置 | |
| JP2003284075A (ja) | 動画像符号化方法と装置及び復号化方法と装置 | |
| JP2001128179A (ja) | 動画像符号化装置および方法 | |
| JP2002335529A (ja) | 動画像符号化方法および装置 | |
| KR100619716B1 (ko) | 이미지 예측 방법 | |
| KR100508800B1 (ko) | 현재 픽쳐의 이미지 블록 예측 방법 | |
| RU2338332C2 (ru) | Способ предсказания блока изображения с использованием усовершенствованного режима прямого предсказания | |
| JP2007060696A (ja) | 動画像復号化方法、装置及びプログラム | |
| JP2000350209A (ja) | リアルタイム動映像符号化のための高速動き推定方法及びその装置 | |
| KR100508799B1 (ko) | 이미지 예측 방법 | |
| JP2001251628A (ja) | ディゾルブ画像の符号化装置 | |
| JP2934175B2 (ja) | 動画像符号化方法と装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050705 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20051005 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20051011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20060912 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070110 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20070130 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20070810 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20071227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080110 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090717 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090723 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4435480 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130108 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130108 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |