JP4372000B2 - 関節置換用の移植組織片の位置を手術中に決定する装置および方法 - Google Patents
関節置換用の移植組織片の位置を手術中に決定する装置および方法 Download PDFInfo
- Publication number
- JP4372000B2 JP4372000B2 JP2004504878A JP2004504878A JP4372000B2 JP 4372000 B2 JP4372000 B2 JP 4372000B2 JP 2004504878 A JP2004504878 A JP 2004504878A JP 2004504878 A JP2004504878 A JP 2004504878A JP 4372000 B2 JP4372000 B2 JP 4372000B2
- Authority
- JP
- Japan
- Prior art keywords
- joint
- graft
- transducer
- area
- position coordinates
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 45
- 238000001356 surgical procedure Methods 0.000 title claims description 21
- 239000013598 vector Substances 0.000 claims abstract description 18
- 238000012545 processing Methods 0.000 claims abstract description 17
- 238000002591 computed tomography Methods 0.000 claims abstract description 15
- 238000005259 measurement Methods 0.000 claims abstract description 13
- 239000007943 implant Substances 0.000 claims abstract description 10
- 230000003287 optical effect Effects 0.000 claims abstract description 5
- 238000011156 evaluation Methods 0.000 claims abstract description 4
- 210000000988 bone and bone Anatomy 0.000 claims description 28
- 238000002679 ablation Methods 0.000 claims description 20
- 210000001519 tissue Anatomy 0.000 claims description 13
- 230000007246 mechanism Effects 0.000 claims description 12
- 230000033001 locomotion Effects 0.000 claims description 10
- 230000002452 interceptive effect Effects 0.000 claims description 9
- 238000013459 approach Methods 0.000 claims description 5
- 230000008569 process Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 claims description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 4
- 238000003325 tomography Methods 0.000 claims description 3
- 238000002271 resection Methods 0.000 claims description 2
- 239000003638 chemical reducing agent Substances 0.000 claims 1
- 230000008407 joint function Effects 0.000 claims 1
- 230000009466 transformation Effects 0.000 abstract description 5
- 210000000689 upper leg Anatomy 0.000 description 28
- 210000001217 buttock Anatomy 0.000 description 12
- 210000001624 hip Anatomy 0.000 description 10
- 210000002414 leg Anatomy 0.000 description 10
- 238000002054 transplantation Methods 0.000 description 10
- 210000001185 bone marrow Anatomy 0.000 description 9
- 239000000463 material Substances 0.000 description 8
- 238000012360 testing method Methods 0.000 description 8
- 210000000588 acetabulum Anatomy 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 210000004394 hip joint Anatomy 0.000 description 5
- 238000002513 implantation Methods 0.000 description 5
- 210000001503 joint Anatomy 0.000 description 5
- 230000004927 fusion Effects 0.000 description 4
- 210000003128 head Anatomy 0.000 description 4
- 210000004197 pelvis Anatomy 0.000 description 4
- 239000000523 sample Substances 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000011161 development Methods 0.000 description 3
- 230000018109 developmental process Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000005094 computer simulation Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000003127 knee Anatomy 0.000 description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 1
- 210000000544 articulatio talocruralis Anatomy 0.000 description 1
- 238000007630 basic procedure Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 210000002436 femur neck Anatomy 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 210000000629 knee joint Anatomy 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 230000000191 radiation effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1071—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring angles, e.g. using goniometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/14—Surgical saws
- A61B17/15—Guides therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/1742—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip
- A61B17/1746—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip for the acetabulum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/0046—Surgical instruments, devices or methods with a releasable handle; with handle and operating part separable
- A61B2017/00464—Surgical instruments, devices or methods with a releasable handle; with handle and operating part separable for use with different instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2072—Reference field transducer attached to an instrument or patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
- A61B5/6878—Bone
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6879—Means for maintaining contact with the body
- A61B5/6884—Clamps or clips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4609—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of acetabular cups
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4611—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of spinal prostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4612—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of shoulders
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Dentistry (AREA)
- Robotics (AREA)
- Prostheses (AREA)
- Surgical Instruments (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
- Image Processing (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
- 関節区域又は脊椎区域における関連の身体軸と関連する関節置換用移植組織片又は脊椎置換用移植組織片の所定身体軸の所定位置合わせベクトルは、集積された画像によって決定され、
- 切除器具又は装着器具又は移植組織片のリアル位置座標を記録するステップにて、現在位置合わせの位置合わせベクトルが決定され、
- 所要の位置合わせベクトルと断定された位置合わせベクトルとの間の偏差が全て計算され、
- 前記偏差から導出された情報、或いは、切除器具又は装着器具又は移植組織片の操作に関連する制御指令が出力される。
基本手順:
1.患者へのCT走査を行う。
2.CTデータから三次元モデルを計算する。
3.CT薄片および三次元モデルにてプランニングを行う。
4.人体軸座標システムを測定(決定)する。
5.モデルを人体軸座標システムへ変換する。
6.骨固定ロケータに相対する寛骨臼の表面を検知する。
7.法線空間の最小化により、三次元プランニングと骨固定アダプタとの間の変換パラメータを計算する。
8.プランデータを外科プランに導入する(骨固定ロケータの座標システム)。
9.校正済み機器の位置合わせを行う。
− 三次元モデルにおける人体軸の位置
− 人工臀部関節の所定回転中心
− 所定ソケットの捻転前角および外転角
1.患者へのCT走査からデータを得る。
2.CTデータから三次元モデルを計算する。
3.CT薄片および三次元モデルにてプランニングを行う。
4.前記モデルを人体軸座標システムへ変換する。
5.プランデータをナビゲーションに出力する。
6.手術中に、骨固定の大腿骨ロケータに相対する大腿骨の表面を検知する。
7.法線空間を最小化することによって、変換用パラメータを計算する。
8.校正済機器の位置合わせを行う。
1.人工ソケットのサイズ
2.傾斜角度、及び捻転前角度
人体面に対するソケット軸の一直線上に存在するこれら2種類の角度は、レントゲン画像を用い、担当外科医の医療見解の基で選出される。また、担当外科医は同様の方法で、これらの角度を手術中に修正、及び変更することができる。
3.縦軸と、腸骨稜から癒合線への方向との間に位置し、矢状面にある角度
この様な角度を決定することによって、手術中における人体軸、及び平面座標システムを決定することが可能となる。
ステムを補綴臀部に配置する際には、図面上の大腿骨首部の捻転前角度を確定する必要があり、更には、元の長さの脚の角度も決定する必要がある。また、ステムの軸上配置に関して、これは大腿骨における骨髄脈管の位置によって大いに左右される。結果として、この様な方法でしか、ステムの実質サイズ及びオフセットが算出できない。
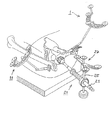
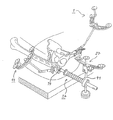
1.1 基体
1.2 取り付け用スリーブ
1.3 4点式ロケータ配列
3 取り付け用クランプ
3.1 中間クランプ部材
3.2 横クランプ部材
5 六角形ボルト
7;7’ 手動式センサ
7.1 センサ本体
7.2 4点式ロケータ配列
9 感知部材
9.1 保持体
11 大腿骨ロケータ
13 大腿骨用クランプ
13.1 第1基材
13.2 ピン
13.3 第2基材
15 ロケータロッド
15.1 取り付け用スリーブ
17 半球体
19 球体アダプタ/手動式センサの組合せ
21 切削器具/ロケータの組合せ
23 切削軸
25 切削軸用アダプタ
27 ロケータ
29 セッティング器具/ロケータの組合せ
31 セッティング器具軸
33 軸アダプタ
35 臀部ソケット
37 骨髄脈管用突き錐/ロケータの組合せ
39 骨髄脈管用突き錐
41 突き錐用アダプタ
Claims (14)
- コンピュータ断層X線写真法を用いて、関節置換用の移植組織片、臀部ソケット又は肩部ソケット又は関連ステムの移植組織片、或いは脊椎置換用の移植組織片、腰椎又は頚椎の脊椎移植組織片の空間位置及び角度位置を手術中に決定する装置であって、
関節置換用の移植組織片が与えられる関節区域又は脊椎区域の三次元画像を生成し保存するコンピュータ断層X線写真法のモデリング機構と、
関節区域又は脊椎区域の実際点或いは仮想点のリアル位置座標、及び/又は、関節区域又は脊椎区域内の点と点との間の位置基準ベクトル、或いは、これらの点から関節区域又は脊椎区域外の肢体末端における関節機能関連点までの位置基準ベクトルを提供する光学座標測定機構と、
備え、
前記座標測定機構は、光学トランスデューサー信号を空間上に記録するステレオカメラ或いはステレオカメラ装置と、互いに堅固に接続されている一組の測定点を有する少なくとも一つのマルチポイントトランスデューサーと、マルチポイントトランスデューサーによって供給されステレオカメラによって記録された一連の測定点座標を評価する評価ユニットとを有し、
この装置は、更に、所定点のリアル位置座標を参照して画像のリアル位置を関節区域又は脊椎区域の実際現在の空間位置と整合させる整合処理ユニットを有し、この整合処理ユニットは、法線空間の最小化によって変換用パラメータを計算するために形成されていることを特徴とする装置。 - 請求項1記載の装置であって、前記整合処理ユニットは、三角形係合及び空間スプライン接近の原理と、スプラインパラメータとしての未知数の定義とを併用することによって、検知された骨表面を画像の対応仮想表面と整合させる対話型調整処理法を実施するために形成されていることを特徴とする装置。
- 請求項1又は2記載の装置であって、
一連の移植組織片のパラメータを入力し、可能な移植組織片の位置及び画像関連のアライメントを特定する入力インターフェースを有し、このインターフェースは、コンピュータ断層X線写真法のモデリングデバイスに接続され、ユーザ案内手段を有する対話式ユーザインターフェースとして形成されており、
前記整合処理ユニットは、前記入力インターフェースに接続され、少なくとも1 セットの入力された移植パラメータ、位置、アライメントから、装着されている移植組織片の所要座標または所要の移動ベクトルを決定し、更に、切除領域又は切除器具の所要座標または所要の移動ベクトルを決定するために形成されていることを特徴とする装置。 - 請求項3記載の装置であって、
前記入力インターフェースは、関連の人体軸ベクトルと臀部ソケットの移植組織片パラメータとを入力し画像統合し、特に、回転中心の座標及び捻転前角度と外転角度とを入力し画像統合するために形成されていることを特徴とする装置。 - 請求項1から4の何れか1項記載の装置であって、
前記座標測定機構の第1マルチポイントトランスデューサーは、座標自身を決定するために関節区域又は脊椎区域における骨基準を検知する移動可能な手動ガイドのセンサとして形成されていることを特徴とする装置。 - 請求項1から5の何れか1項記載の装置であって、
第2マルチポイントトランスデューサーは、関節区域又は脊椎区域における骨又は脊椎へ堅固に装着されるように形成されていることを特徴とする装置。 - 請求項1から6の何れか1項記載の装置であって、
切除器具、特に切削器具又はヤスリを有し、これは、第2又は第3マルチポイントトランスデューサーに堅固に接続されて、幾何学的に校正された操作可能な器具/トランスデューサーユニットを形成し、これにより該ユニットのトランスデューサー信号から、切除器具、特に切削器具又はヤスリの操作部分のリアル位置座標を決定することができ、更に必要に応じて、切除器具によって形成された切除区域のリアル位置座標を決定し、
そして、
コンピュータ断層X線写真法モデリング機構によって得られた関節区域又は脊椎区域の画像で概略な表示を行うための切除器具パラメータを入力するために形成された入力インターフェースと、
実質上のリアルタイムで、手術部分のリアル位置座標および、必要に応じて、切除区域のリアル位置座標を、関節区域または脊椎区域の画像に分配するために形成された整合処理ユニットと、
関節区域または脊椎区域の画像をリアル位置座標に整合したまま、現在位置における手術部分又は切除区域を概略的に表示するために形成された画像表示ユニットと、
を備えていることを特徴とする装置。 - 請求項1から7の何れか1項記載の装置であって、
装着器具、特に螺合用器具を有し、これは、第2 又は第3 マルチポイントトランスデューサーに堅固接続可能であることで、幾何学的に校正された操作可能な器具/トランスデューサーユニットを形成し、これにより該ユニットのトランスデューサー信号から、装着器具操作部分のリアル位置座標、特にスクリュードライバーブレードのリアル位置座標を決定し、そして移植組織片自身のリアル位置座標を決定することが可能となり、
コンピュータ断層X線写真法モデリング機構によって得られた関節区域又は脊椎区域の画像で概略な表示を行うための装着器具パラメータを入力するために形成された入力インターフェースと、
実質上のリアルタイムで、手術部分のリアル位置座標および、必要に応じて、移植組織片のリアル位置座標を、関節区域または脊椎区域の画像に分配するために形成された整合処理ユニットと、
リアル位置座標に整合した関節区域または脊椎区域の画像によって、リアル位置における手術部分又は移植組織片を概略的に表示するために形成された画像表示ユニットと、
を備えていることを特徴とする装置。 - 請求項7又は8記載の装置であって、
前記切除器具及び/又は装着器具は、マルチポイントトランスデューサーへの堅固接続を行うための装着部を有する握り付手動ガイド器具として形成されていることを特徴とする装置。 - 請求項1から7の何れか1項記載の装置であって、
アダプタ部材を有し、これを用いてマルチポイントトランスデューサーを関節置換用の移植組織片に、特にステム移植組織片の基端部に堅固装着して操作可能な移植組織片/トランスデューサーユニットを形成し、これにより、該ユニットのトランスデューサー信号から、前記アダプタ部材のリアル位置座標、そして移植組織片自身のリアル位置座標を決定することが可能となり、
そして、
コンピュータ断層X線写真法モデリング機構によって得られた関節区域又は脊椎区域の画像で前記アダプタ又は移植組織片を概略的に表示するためのアダプタパラメータを入力するために形成された入力インターフェースと、
実質上のリアルタイムで、前記アダプタのリアル位置座標および、必要に応じて、移植組織片のリアル位置座標を、関節区域または脊椎区域の画像に分配するために形成された整合処理ユニットと、
リアル位置座標に整合した関節区域または脊椎区域の画像によって、リアル位置におけるアダプタ又は移植組織片を概略的に表示するために形成された画像表示ユニットと、
を備えたことを特徴とする装置。 - 請求項1から10の何れか1項記載の装置であって、
前記マルチポイントトランスデューサー、或いは少なくとも一つのマルチポイントトランスデューサーは、四つの球形反射器を有するパッシブ型四点トランスデューサーとして形成されており、前記ステレオカメラ又は他のステレオカメラは、マルチポイントトランスデューサーを照明する照明装置と固定関係に位置されていることを特徴とする装置。 - 請求項2から11の何れか1項記載の装置であって、
前記ユーザインターフェースは、少なくとも三次元の画像を関連の身体軸に位置合わせるためのメニューガイダンスを提供する手段を有することを特徴とする装置。 - 請求項12記載の装置であって、
前記ユーザインターフェースは、適切な移植組織片のパラメータを保存するマルチ区域メモリ、又は移植組織片パラメータデータバンクへのデータバンクインターフェースを有し、
メニューガイダンスを提供する手段は、マルチ区域メモリ又は移植組織片パラメータデータバンクへのアクセスを繰返すことによって部材を選択する対話式プロセスを実行するために形成されていることを特徴とする装置。 - 請求項3から13の何れか1項記載の装置であって、
評価ユニットと整合処理ユニットとに接続された制御信号生成ユニットを有し、この制御信号生成ユニットによって、入力インターフェースにより入力され関節区域又は脊椎区域のリアル位置座標に整合された一連の移植組織片の位置データ又は位置合わせデータは、切除器具又は装着器具または移植組織片の操作部分の現在取得したリアル位置座標と比較され、希望位置座標と実際位置座標との間の偏差が検出され、文書又は音声出力及び/又は画像での概略表示により、この偏差から導出された偏差データ又は制御指令が出力されることを特徴とする装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10222415 | 2002-05-21 | ||
| DE10306793A DE10306793A1 (de) | 2002-05-21 | 2003-02-18 | Anordnung und Verfahren zur intraoperativen Festlegung der Lage eines Gelenkersatzimplantats |
| PCT/EP2003/004469 WO2003096870A2 (de) | 2002-05-21 | 2003-04-29 | Anordnung und verfahren zur intraoperativen festlegung der lage eines gelenkersatzimplantats |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005525858A JP2005525858A (ja) | 2005-09-02 |
| JP4372000B2 true JP4372000B2 (ja) | 2009-11-25 |
Family
ID=29550936
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004504878A Expired - Fee Related JP4372000B2 (ja) | 2002-05-21 | 2003-04-29 | 関節置換用の移植組織片の位置を手術中に決定する装置および方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20050149050A1 (ja) |
| EP (1) | EP1507472B1 (ja) |
| JP (1) | JP4372000B2 (ja) |
| AT (1) | ATE378000T1 (ja) |
| AU (1) | AU2003242528A1 (ja) |
| DE (2) | DE10306793A1 (ja) |
| WO (1) | WO2003096870A2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD995790S1 (en) | 2020-03-30 | 2023-08-15 | Depuy Ireland Unlimited Company | Robotic surgical tool |
| US12004816B2 (en) | 2020-03-30 | 2024-06-11 | Depuy Ireland Unlimited Company | Robotic surgical apparatus with positioning guide |
| US12042944B2 (en) | 2020-03-30 | 2024-07-23 | Depuy Ireland Unlimited Company | Robotic surgical system with graphical user interface |
Families Citing this family (124)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2002237008A1 (en) * | 2000-08-31 | 2002-03-13 | Plus Endoprothetik Ag | Method and device for determining a load axis of an extremity |
| US7547307B2 (en) | 2001-02-27 | 2009-06-16 | Smith & Nephew, Inc. | Computer assisted knee arthroplasty instrumentation, systems, and processes |
| US7708741B1 (en) | 2001-08-28 | 2010-05-04 | Marctec, Llc | Method of preparing bones for knee replacement surgery |
| JP2005516724A (ja) | 2002-02-11 | 2005-06-09 | スミス アンド ネフュー インコーポレーテッド | 画像案内式骨折整復 |
| US9308002B2 (en) | 2002-11-07 | 2016-04-12 | Crescent H Trust | Precise hip component positioning for hip replacement surgery |
| US9610092B2 (en) | 2011-08-29 | 2017-04-04 | Microsoft Orthopedics Holdings Inc. | Precision hip replacement method |
| US20040171930A1 (en) * | 2003-02-04 | 2004-09-02 | Zimmer Technology, Inc. | Guidance system for rotary surgical instrument |
| US20040152955A1 (en) * | 2003-02-04 | 2004-08-05 | Mcginley Shawn E. | Guidance system for rotary surgical instrument |
| US7862570B2 (en) | 2003-10-03 | 2011-01-04 | Smith & Nephew, Inc. | Surgical positioners |
| US7764985B2 (en) | 2003-10-20 | 2010-07-27 | Smith & Nephew, Inc. | Surgical navigation system component fault interfaces and related processes |
| AU2004291146B2 (en) | 2003-11-14 | 2011-08-25 | Smith & Nephew, Inc. | Adjustable surgical cutting systems |
| US20050109855A1 (en) * | 2003-11-25 | 2005-05-26 | Mccombs Daniel | Methods and apparatuses for providing a navigational array |
| US8419798B2 (en) | 2003-12-30 | 2013-04-16 | Depuy Products, Inc. | Joint prosthesis with infinitely positionable head |
| US20050203539A1 (en) * | 2004-03-08 | 2005-09-15 | Grimm James E. | Navigated stemmed orthopaedic implant inserter |
| DE102004013368A1 (de) * | 2004-03-17 | 2005-10-06 | Merete Medical Gmbh | Modulares Gelenkprothesensystem |
| CA2561493A1 (en) | 2004-03-31 | 2005-10-20 | Smith & Nephew, Inc. | Methods and apparatuses for providing a reference array input device |
| AU2005237479B8 (en) | 2004-04-21 | 2011-09-29 | Smith & Nephew, Inc. | Computer-aided methods for shoulder arthroplasty |
| DE102004042183A1 (de) | 2004-06-22 | 2006-01-19 | Plus Endoprothetik Ag | Gerät zum Setzen oder Entfernen von Gelenken oder Gelenkpfannen |
| US8273093B2 (en) | 2004-06-29 | 2012-09-25 | Depuy Products, Inc. | Instrumentation for recording and replicating orthopaedic implant orientation |
| US7636595B2 (en) | 2004-10-28 | 2009-12-22 | Medtronic Navigation, Inc. | Method and apparatus for calibrating non-linear instruments |
| EP1654997B1 (de) * | 2004-11-08 | 2007-12-12 | BrainLAB AG | Beinlängenanpassung bei der Hüftprothesen-Chirurgie |
| WO2006060632A1 (en) * | 2004-12-02 | 2006-06-08 | Smith & Nephew, Inc. | Systems for providing a reference plane for mounting an acetabular cup |
| US8460390B2 (en) | 2004-12-29 | 2013-06-11 | Depuy Products, Inc. | System and method for replicating orthopaedic implant orientation |
| US8444698B2 (en) | 2004-12-29 | 2013-05-21 | Depuy Products, Inc. | Joint prosthesis with infinitely positionable head |
| DE102005003317A1 (de) * | 2005-01-17 | 2006-07-27 | Aesculap Ag & Co. Kg | Verfahren zur Bestimmung der neutralen Position eines Oberschenkelknochens relativ zu einem Beckenknochen und Vorrichtung zur Durchführung dieses Verfahrens |
| DE102005003318A1 (de) * | 2005-01-17 | 2006-07-27 | Aesculap Ag & Co. Kg | Verfahren zur Anzeige der Position und Orientierung eines chirurgischen Werkzeuges und Vorrichtung zur Durchführung dieses Verfahrens |
| EP1855601B1 (en) | 2005-02-22 | 2018-10-10 | Smith & Nephew, Inc. | In-line milling system |
| KR100706030B1 (ko) * | 2005-04-12 | 2007-04-11 | 한국과학기술원 | 참조기구를 이용한 비구컵 항행장치 및 이를 이용한 비구컵항행방법 |
| DE102005030184B4 (de) * | 2005-06-29 | 2008-09-11 | Aesculap Ag & Co. Kg | Verfahren zur Bestimmung der Relativposition eines Markierelementes an einem chirurgischen Instrument sowie chirurgisches Instrument und Navigationssystem zur Durchführung dieses Verfahrens |
| US8679185B2 (en) * | 2005-09-30 | 2014-03-25 | DePuy Synthes Products, LLC | Joint prosthesis with positionable head |
| EP1774922B1 (de) * | 2005-10-12 | 2008-06-11 | BrainLAB AG | Marker für ein Navigationssystem und Verfahren zum Detektieren eines Markers |
| EP1779798B1 (en) * | 2005-10-25 | 2009-02-18 | BrainLAB AG | Non-penetrating fixing device |
| US8192449B2 (en) * | 2005-10-25 | 2012-06-05 | Brainlab Ag | Non-penetrating fixing device |
| US20070161888A1 (en) * | 2005-12-30 | 2007-07-12 | Sherman Jason T | System and method for registering a bone of a patient with a computer assisted orthopaedic surgery system |
| US8862200B2 (en) | 2005-12-30 | 2014-10-14 | DePuy Synthes Products, LLC | Method for determining a position of a magnetic source |
| US7525309B2 (en) | 2005-12-30 | 2009-04-28 | Depuy Products, Inc. | Magnetic sensor array |
| US20070239153A1 (en) * | 2006-02-22 | 2007-10-11 | Hodorek Robert A | Computer assisted surgery system using alternative energy technology |
| DE102006035602A1 (de) * | 2006-07-31 | 2008-02-07 | Plus Orthopedics Ag | Klammer zur Befestigung chirurgischer Operationshilfsmittel, Stellorgan für eine derartige Klammer und eine Anordnung umfassend ein Stellorgan und eine Klammer |
| WO2008064126A2 (en) * | 2006-11-17 | 2008-05-29 | Smith & Nephew, Inc. | Reference frame fixator |
| DE502006005210D1 (de) | 2006-12-05 | 2009-12-03 | Brainlab Ag | Halterung für einen Knochenbohrer und Knochenbohrer-Halterungssystem |
| US8475470B2 (en) * | 2006-12-21 | 2013-07-02 | General Electric Company | Percutaneous registration apparatus and method for use in surgical navigation |
| US8068648B2 (en) | 2006-12-21 | 2011-11-29 | Depuy Products, Inc. | Method and system for registering a bone of a patient with a computer assisted orthopaedic surgery system |
| US8357165B2 (en) * | 2006-12-22 | 2013-01-22 | Depuy Products, Inc. | Reference array mounting bracket for use with a computer assisted orthopaedic surgery system |
| US8814868B2 (en) * | 2007-02-28 | 2014-08-26 | Smith & Nephew, Inc. | Instrumented orthopaedic implant for identifying a landmark |
| US8784425B2 (en) | 2007-02-28 | 2014-07-22 | Smith & Nephew, Inc. | Systems and methods for identifying landmarks on orthopedic implants |
| DE102007051719A1 (de) * | 2007-10-30 | 2009-05-07 | Sicat Gmbh & Co. Kg | Schichtaufnahmen zur Implantatplanung |
| US8986309B1 (en) * | 2007-11-01 | 2015-03-24 | Stephen B. Murphy | Acetabular template component and method of using same during hip arthrosplasty |
| US11992271B2 (en) | 2007-11-01 | 2024-05-28 | Stephen B. Murphy | Surgical system using a registration device |
| US10335236B1 (en) | 2007-11-01 | 2019-07-02 | Stephen B. Murphy | Surgical system using a registration device |
| US8267938B2 (en) | 2007-11-01 | 2012-09-18 | Murphy Stephen B | Method and apparatus for determining acetabular component positioning |
| US9220514B2 (en) | 2008-02-28 | 2015-12-29 | Smith & Nephew, Inc. | System and method for identifying a landmark |
| GB0803725D0 (en) * | 2008-02-29 | 2008-04-09 | Depuy Int Ltd | Surgical apparatus and procedure |
| US8828008B2 (en) | 2008-03-05 | 2014-09-09 | Allston J. Stubbs | Apparatus for arthroscopic assisted arthroplasty of the hip joint |
| US8549888B2 (en) | 2008-04-04 | 2013-10-08 | Nuvasive, Inc. | System and device for designing and forming a surgical implant |
| US8002838B2 (en) | 2008-06-11 | 2011-08-23 | Depuy Products, Inc. | Joint prosthesis with positionable head |
| US8588892B2 (en) * | 2008-12-02 | 2013-11-19 | Avenir Medical Inc. | Method and system for aligning a prosthesis during surgery using active sensors |
| US9031637B2 (en) | 2009-04-27 | 2015-05-12 | Smith & Nephew, Inc. | Targeting an orthopaedic implant landmark |
| US8945147B2 (en) | 2009-04-27 | 2015-02-03 | Smith & Nephew, Inc. | System and method for identifying a landmark |
| GB0913930D0 (en) * | 2009-08-07 | 2009-09-16 | Ucl Business Plc | Apparatus and method for registering two medical images |
| EP2294980B1 (en) * | 2009-09-09 | 2012-03-28 | In Novation B.V. | Hip surgery assembly |
| ES2425547T3 (es) | 2010-03-25 | 2013-10-16 | Hipsecure B.V. | Sistema de navegación para cirugía ortopédica |
| EP2560570A1 (en) * | 2010-04-19 | 2013-02-27 | BrainLAB AG | Data processing and transferring method relating to the placement of surgical implants |
| CN107582129B (zh) | 2010-06-03 | 2021-10-08 | 史密夫和内修有限公司 | 骨科植入物 |
| AU2011344107A1 (en) * | 2010-12-13 | 2013-06-27 | Ortho Kinematics, Inc. | Methods, systems and devices for clinical data reporting and surgical navigation |
| KR20130129246A (ko) | 2010-12-17 | 2013-11-27 | 아브니르 메디컬 아이엔씨. | 수술 중에 보철물을 정렬하기 위한 방법 및 시스템 |
| WO2012103169A2 (en) | 2011-01-25 | 2012-08-02 | Smith & Nephew, Inc. | Targeting operation sites |
| BR112013028627A2 (pt) | 2011-05-06 | 2017-01-24 | Smith & Nephew Inc | limites-alvo de dispositivos ortopédicos |
| CA2839060A1 (en) | 2011-06-16 | 2012-12-20 | Smith & Nephew, Inc. | Surgical alignment using references |
| EP2720633B1 (en) * | 2011-06-17 | 2021-07-21 | Brainlab AG | System and computer program for positioning an implant |
| US9167989B2 (en) * | 2011-09-16 | 2015-10-27 | Mako Surgical Corp. | Systems and methods for measuring parameters in joint replacement surgery |
| DE102011119073A1 (de) * | 2011-11-15 | 2013-05-16 | Fiagon Gmbh | Registrierverfahren, Positionserfassungssystem und Abtastinstrument |
| US11207132B2 (en) | 2012-03-12 | 2021-12-28 | Nuvasive, Inc. | Systems and methods for performing spinal surgery |
| US9314188B2 (en) | 2012-04-12 | 2016-04-19 | Intellijoint Surgical Inc. | Computer-assisted joint replacement surgery and navigation systems |
| CA2866192C (en) | 2012-07-30 | 2021-02-23 | Orthosoft Inc. | Pelvic digitizer device with inertial sensor unit and method |
| US9646229B2 (en) | 2012-09-28 | 2017-05-09 | Siemens Medical Solutions Usa, Inc. | Method and system for bone segmentation and landmark detection for joint replacement surgery |
| US20140135791A1 (en) | 2012-11-09 | 2014-05-15 | Blue Belt Technologies, Inc. | Systems and methods for navigation and control of an implant positioning device |
| US9993273B2 (en) | 2013-01-16 | 2018-06-12 | Mako Surgical Corp. | Bone plate and tracking device using a bone plate for attaching to a patient's anatomy |
| US9566120B2 (en) | 2013-01-16 | 2017-02-14 | Stryker Corporation | Navigation systems and methods for indicating and reducing line-of-sight errors |
| US9585768B2 (en) | 2013-03-15 | 2017-03-07 | DePuy Synthes Products, Inc. | Acetabular cup prosthesis alignment system and method |
| US9247998B2 (en) | 2013-03-15 | 2016-02-02 | Intellijoint Surgical Inc. | System and method for intra-operative leg position measurement |
| JP6368906B2 (ja) | 2013-06-11 | 2018-08-08 | オルトタクシ | 身体部分の計画されたボリュームの処置用システム |
| DE202013012313U1 (de) | 2013-07-17 | 2016-02-25 | Fiagon Gmbh | Vorrichtung zur Anbindung eines medizinischen Instruments an ein Lageerfassungssystem und medizinisches Zeigerinstrument |
| KR101535233B1 (ko) * | 2013-09-16 | 2015-07-09 | 한양대학교 산학협력단 | 뇌수술용 다자유도 구동방법 |
| FR3010628B1 (fr) | 2013-09-18 | 2015-10-16 | Medicrea International | Procede permettant de realiser la courbure ideale d'une tige d'un materiel d'osteosynthese vertebrale destinee a etayer la colonne vertebrale d'un patient |
| US9848922B2 (en) | 2013-10-09 | 2017-12-26 | Nuvasive, Inc. | Systems and methods for performing spine surgery |
| CN105611884B (zh) | 2013-10-09 | 2019-06-28 | 纽文思公司 | 在手术脊椎程序期间术中设计并评定脊椎畸形矫正的系统 |
| FR3012030B1 (fr) | 2013-10-18 | 2015-12-25 | Medicrea International | Procede permettant de realiser la courbure ideale d'une tige d'un materiel d'osteosynthese vertebrale destinee a etayer la colonne vertebrale d'un patient |
| DE102013222230A1 (de) | 2013-10-31 | 2015-04-30 | Fiagon Gmbh | Chirurgisches Instrument |
| KR101594989B1 (ko) * | 2014-05-30 | 2016-02-18 | 큐렉소 주식회사 | 조직 위치 정합 방법 및 이를 이용하는 장치 |
| JP2017519562A (ja) | 2014-06-17 | 2017-07-20 | ニューヴェイジヴ,インコーポレイテッド | 外科手術中の脊椎矯正の計画、実施、及び評価のためのシステム及び方法 |
| US10433893B1 (en) | 2014-10-17 | 2019-10-08 | Nuvasive, Inc. | Systems and methods for performing spine surgery |
| US20160262800A1 (en) * | 2015-02-13 | 2016-09-15 | Nuvasive, Inc. | Systems and methods for planning, performing, and assessing spinal correction during surgery |
| US20160354161A1 (en) * | 2015-06-05 | 2016-12-08 | Ortho Kinematics, Inc. | Methods for data processing for intra-operative navigation systems |
| US10456211B2 (en) | 2015-11-04 | 2019-10-29 | Medicrea International | Methods and apparatus for spinal reconstructive surgery and measuring spinal length and intervertebral spacing, tension and rotation |
| KR102199152B1 (ko) * | 2016-02-15 | 2021-01-06 | 각고호우징 게이오기주크 | 척주배열 추정장치, 척주배열 추정방법 및 척주배열 추정프로그램 |
| CN105769393A (zh) * | 2016-04-08 | 2016-07-20 | 罗佳 | 一种髋关节假体匹配方法及系统 |
| US10537395B2 (en) | 2016-05-26 | 2020-01-21 | MAKO Surgical Group | Navigation tracker with kinematic connector assembly |
| CN111991090B (zh) * | 2016-08-30 | 2024-06-21 | 马科外科公司 | 用于术中骨盆配准的系统和方法 |
| US11350995B2 (en) | 2016-10-05 | 2022-06-07 | Nuvasive, Inc. | Surgical navigation systems and methods |
| WO2018109556A1 (en) | 2016-12-12 | 2018-06-21 | Medicrea International | Systems and methods for patient-specific spinal implants |
| JP7165668B2 (ja) | 2017-04-21 | 2022-11-04 | メディクレア インターナショナル | 1種または複数の患者特異的脊椎インプラントを開発するためのシステム |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| US11065069B2 (en) | 2017-05-10 | 2021-07-20 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| US10918422B2 (en) | 2017-12-01 | 2021-02-16 | Medicrea International | Method and apparatus for inhibiting proximal junctional failure |
| WO2019137507A1 (en) * | 2018-01-11 | 2019-07-18 | Shenzhen United Imaging Healthcare Co., Ltd. | Systems and methods for surgical route planning |
| CN108158655A (zh) * | 2018-01-25 | 2018-06-15 | 上海长征医院 | 用于颈椎前路手术的导航定位器固定装置 |
| KR102892800B1 (ko) | 2018-01-26 | 2025-12-02 | 마코 서지컬 코포레이션 | 수술 로봇에 의해 가이드된 보철물에 충격을 가하기 위한 엔드 이펙터, 시스템 및 방법 |
| KR102166149B1 (ko) * | 2019-03-13 | 2020-10-15 | 큐렉소 주식회사 | 페디클 스크류 고정 플래닝 시스템 및 방법 |
| US11944385B2 (en) | 2019-04-02 | 2024-04-02 | Medicrea International | Systems and methods for medical image analysis |
| WO2020201353A1 (en) | 2019-04-02 | 2020-10-08 | Medicrea International | Systems, methods, and devices for developing patient-specific spinal implants, treatments, operations, and/or procedures |
| US11925417B2 (en) | 2019-04-02 | 2024-03-12 | Medicrea International | Systems, methods, and devices for developing patient-specific spinal implants, treatments, operations, and/or procedures |
| EP3719749A1 (en) | 2019-04-03 | 2020-10-07 | Fiagon AG Medical Technologies | Registration method and setup |
| US11612440B2 (en) | 2019-09-05 | 2023-03-28 | Nuvasive, Inc. | Surgical instrument tracking devices and related methods |
| US11769251B2 (en) | 2019-12-26 | 2023-09-26 | Medicrea International | Systems and methods for medical image analysis |
| US12178667B2 (en) | 2021-02-16 | 2024-12-31 | Mako Surgical Corp. | Clamp assembly for fixing a navigation tracker to a portion of bone |
| US12318144B2 (en) | 2021-06-23 | 2025-06-03 | Medicrea International SA | Systems and methods for planning a patient-specific spinal correction |
| CN113681895B (zh) * | 2021-08-20 | 2023-03-10 | 宜宾显微智能科技有限公司 | 一种导针定位导向板定制及模拟验证系统及其方法 |
| CN113768640B (zh) * | 2021-11-09 | 2022-02-08 | 极限人工智能有限公司 | 一种确定机械臂工作位姿的方法和装置 |
| US12369981B2 (en) | 2023-02-07 | 2025-07-29 | Depuy Ireland Unlimited Company | Systems and methods for bone model registration with adaptive soft tissue thickness |
| KR20250009757A (ko) * | 2023-07-11 | 2025-01-20 | (주)시안솔루션 | 환자 맞춤형으로 이식재 및 가이던스를 설계하는 방법, 이를 위한 프로그램 및 장치 |
| CN118203420B (zh) * | 2024-04-11 | 2025-09-19 | 广州艾目易科技有限公司 | 一种置换体引导坐标的确定方法、装置、设备及介质 |
| CN118424107B (zh) * | 2024-07-05 | 2024-09-24 | 成就医学科技(天津)有限公司 | 基于光学导航系统的类球体骨模型球心定位方法及系统 |
| CN119139002B (zh) * | 2024-11-18 | 2025-04-18 | 南昌华安众辉健康科技股份有限公司 | 一种基于机械臂的高频电刀控制方法及系统 |
| CN119950130B (zh) * | 2024-12-19 | 2025-10-17 | 浙江德康医疗器械有限公司 | 一种股骨植入物生物力学测试装配方法 |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4759350A (en) * | 1986-10-17 | 1988-07-26 | Dunn Harold K | Instruments for shaping distal femoral and proximal tibial surfaces |
| US4979949A (en) * | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US5007912A (en) * | 1990-05-30 | 1991-04-16 | Albrektsson Bjoern | Arrangement for fixing a knee-joint in defined positions and for positional control of instruments for replacing the knee-joint with a prosthesis |
| US5198877A (en) * | 1990-10-15 | 1993-03-30 | Pixsys, Inc. | Method and apparatus for three-dimensional non-contact shape sensing |
| US5198977A (en) * | 1990-11-27 | 1993-03-30 | Jesse Salb | System and method for localization of functional activity in the human brain |
| US6006126A (en) * | 1991-01-28 | 1999-12-21 | Cosman; Eric R. | System and method for stereotactic registration of image scan data |
| US5265034A (en) * | 1991-05-13 | 1993-11-23 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Feedback controlled optics with wavefront compensation |
| US5514143A (en) * | 1991-11-27 | 1996-05-07 | Apogee Medical Products, Inc. | Apparatus and method for use during surgery |
| AU679242B2 (en) * | 1993-06-21 | 1997-06-26 | Howmedica Osteonics Corp. | Apparatus and method for aligning knee prostheses |
| EP0705074B1 (en) * | 1993-06-21 | 2000-05-10 | Osteonics Corp. | Apparatus for locating functional structures of the leg during knee surgery |
| US5601566A (en) * | 1994-02-22 | 1997-02-11 | Osteonics Corp. | Method and apparatus for the alignment of a femoral knee prosthesis |
| US5910143A (en) * | 1994-12-16 | 1999-06-08 | Exactech, Inc. | Intramedullary alignment guide tool |
| FR2734900B1 (fr) * | 1995-06-01 | 1997-07-04 | Sextant Avionique | Procede de determination de la position et de l'orientation d'un systeme mobile, notamment de la ligne de visee dans un viseur de casque |
| US5806518A (en) * | 1995-09-11 | 1998-09-15 | Integrated Surgical Systems | Method and system for positioning surgical robot |
| US6351659B1 (en) * | 1995-09-28 | 2002-02-26 | Brainlab Med. Computersysteme Gmbh | Neuro-navigation system |
| US5682886A (en) * | 1995-12-26 | 1997-11-04 | Musculographics Inc | Computer-assisted surgical system |
| US5880976A (en) * | 1997-02-21 | 1999-03-09 | Carnegie Mellon University | Apparatus and method for facilitating the implantation of artificial components in joints |
| DE29704393U1 (de) * | 1997-03-11 | 1997-07-17 | Aesculap Ag, 78532 Tuttlingen | Vorrichtung zur präoperativen Bestimmung der Positionsdaten von Endoprothesenteilen |
| US5888245A (en) * | 1997-05-21 | 1999-03-30 | Bristol-Myers Squibb Company | Rotational alignment guide for a prosthetic hip stem implant and method of using same |
| ATE259623T1 (de) * | 1997-11-05 | 2004-03-15 | Synthes Ag | Virtuelle darstellung eines knochens oder eines knochengelenkes |
| DE19805314A1 (de) * | 1998-02-10 | 1999-08-19 | Patent Treuhand Ges Fuer Elektrische Gluehlampen Mbh | Schaltungsanordnung zum Betrieb mindestens einer elektrodenlosen Entladungslampe |
| WO2000000093A1 (de) * | 1998-06-29 | 2000-01-06 | Plus Endoprothetik Ag | Vorrichtung und verfahren zum einsetzen einer knieprothese |
| US6327491B1 (en) * | 1998-07-06 | 2001-12-04 | Neutar, Llc | Customized surgical fixture |
| US6013081A (en) * | 1998-09-09 | 2000-01-11 | Sulzer Orthopedics Inc. | Apparatus and method for anterior and posterior referenced sizing and distal femur resection |
| FR2785517B1 (fr) * | 1998-11-10 | 2001-03-09 | Univ Joseph Fourier | Procede et dispositif de determination du centre d'une articulation |
| US6692447B1 (en) * | 1999-02-16 | 2004-02-17 | Frederic Picard | Optimizing alignment of an appendicular |
| AU748703B2 (en) * | 1999-03-17 | 2002-06-13 | Ao Technology Ag | Imaging and planning device for ligament graft placement |
| US6675122B1 (en) * | 1999-04-19 | 2004-01-06 | Leica Geosystems Ag | Indirect position determination with the aid of a tracker |
| FR2799112B1 (fr) * | 1999-10-01 | 2002-07-19 | Praxim | Procede de recalage d'images medicales sur un patient et dispositif associe |
| US6711432B1 (en) * | 2000-10-23 | 2004-03-23 | Carnegie Mellon University | Computer-aided orthopedic surgery |
| AU2002237008A1 (en) * | 2000-08-31 | 2002-03-13 | Plus Endoprothetik Ag | Method and device for determining a load axis of an extremity |
| JP2005516724A (ja) * | 2002-02-11 | 2005-06-09 | スミス アンド ネフュー インコーポレーテッド | 画像案内式骨折整復 |
| ATE409006T1 (de) * | 2002-05-21 | 2008-10-15 | Plus Orthopedics Ag | Anordnung zur ermittlung funktionsbestimmender geometrischer grössen eines gelenkes eines wirbeltiers |
| WO2004041097A1 (de) * | 2002-11-05 | 2004-05-21 | Aesculap Ag & Co. Kg | Verfahren und vorrichtung zur bestimmung der lage einer kniegelenkendoprothese |
| US7318827B2 (en) * | 2002-12-02 | 2008-01-15 | Aesculap Ag & Co. Kg | Osteotomy procedure |
| DE20303499U1 (de) * | 2003-02-26 | 2003-04-30 | Aesculap AG & Co. KG, 78532 Tuttlingen | Patella-Referenzvorrichtung |
| DE10343826B4 (de) * | 2003-09-22 | 2006-02-09 | Plus-Endoprothetik Ag | Knochenfester Lokator und Navigationssystem |
| EP1561431B1 (de) * | 2004-02-03 | 2009-08-12 | BrainLAB AG | Vorrichtung zum Bestimmen der Position eines Schneidblocks |
| EP1616540B1 (de) * | 2004-07-14 | 2007-11-14 | BrainLAB AG | Positionierungssystem mit kannuliertem Implantat |
-
2003
- 2003-02-18 DE DE10306793A patent/DE10306793A1/de not_active Withdrawn
- 2003-04-29 AU AU2003242528A patent/AU2003242528A1/en not_active Abandoned
- 2003-04-29 EP EP03752717A patent/EP1507472B1/de not_active Expired - Lifetime
- 2003-04-29 JP JP2004504878A patent/JP4372000B2/ja not_active Expired - Fee Related
- 2003-04-29 WO PCT/EP2003/004469 patent/WO2003096870A2/de not_active Ceased
- 2003-04-29 DE DE50308602T patent/DE50308602D1/de not_active Expired - Lifetime
- 2003-04-29 AT AT03752717T patent/ATE378000T1/de not_active IP Right Cessation
-
2004
- 2004-11-19 US US10/994,188 patent/US20050149050A1/en not_active Abandoned
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD995790S1 (en) | 2020-03-30 | 2023-08-15 | Depuy Ireland Unlimited Company | Robotic surgical tool |
| US12004816B2 (en) | 2020-03-30 | 2024-06-11 | Depuy Ireland Unlimited Company | Robotic surgical apparatus with positioning guide |
| US12042944B2 (en) | 2020-03-30 | 2024-07-23 | Depuy Ireland Unlimited Company | Robotic surgical system with graphical user interface |
| US12447627B2 (en) | 2020-03-30 | 2025-10-21 | Depuy Ireland Unlimited Company | Robotic surgical system with graphical user interface |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE378000T1 (de) | 2007-11-15 |
| JP2005525858A (ja) | 2005-09-02 |
| WO2003096870A2 (de) | 2003-11-27 |
| EP1507472A2 (de) | 2005-02-23 |
| US20050149050A1 (en) | 2005-07-07 |
| DE50308602D1 (de) | 2007-12-27 |
| EP1507472B1 (de) | 2007-11-14 |
| DE10306793A1 (de) | 2003-12-04 |
| AU2003242528A8 (en) | 2003-12-02 |
| WO2003096870A3 (de) | 2004-09-02 |
| AU2003242528A1 (en) | 2003-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4372000B2 (ja) | 関節置換用の移植組織片の位置を手術中に決定する装置および方法 | |
| JP2005525868A (ja) | 脊椎関節の機能断定用幾何パラメータを確定する装置 | |
| EP4265214B1 (en) | Navigation system for joint replacement surgery | |
| EP4265213B1 (en) | Navigation and positioning system for joint replacement surgery robot | |
| US12201380B2 (en) | System and method for computer-aided surgical navigation implementing 3D scans | |
| US20200390503A1 (en) | Systems and methods for surgical navigation and orthopaedic fixation | |
| US8078254B2 (en) | Virtual trial reduction system for hip arthroplasty and coordinate systems therefor | |
| JP4726032B2 (ja) | 体肢の力学軸の位置を検出する方法及び装置 | |
| JP4754215B2 (ja) | コンピュータ支援膝関節形成術の器具類、システム、および方法 | |
| JP4398732B2 (ja) | 股関節置換外科手術のための非画像化型コンピュータ支援ナビゲーション・システム | |
| US10881462B2 (en) | Method of determining a contour of an anatomical structure and selecting an orthopaedic implant to replicate the anatomical structure | |
| JP2025011105A (ja) | インプラントカップの計画姿勢を計画することを含む方法及び手術システム | |
| US20070038059A1 (en) | Implant and instrument morphing | |
| US20060190011A1 (en) | Systems and methods for providing a reference plane for mounting an acetabular cup during a computer-aided surgery | |
| US20040181149A1 (en) | Device and method for intraoperative navigation | |
| JP2020511239A (ja) | ナビゲーション手術における拡張現実ディスプレイのためのシステム及び方法 | |
| JP2008526427A (ja) | 膝関節形成術におけるコンピュータ支援による靭帯バランシング | |
| EP1545369A1 (en) | A method for providing pelvic orientation information in computer-assisted surgery | |
| JP2007518540A (ja) | 患者に対して取り付けられた外科手術ナビゲーションセンサを提供するための方法およびシステムおよび装置 | |
| Joskowicz et al. | Computer integrated revision total hip replacement surgery: Preliminary report | |
| AU2012200215A1 (en) | Systems for providing a reference plane for mounting an acetabular cup |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090403 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090629 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090807 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090901 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120911 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130911 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |