KR20130129246A - 수술 중에 보철물을 정렬하기 위한 방법 및 시스템 - Google Patents
수술 중에 보철물을 정렬하기 위한 방법 및 시스템 Download PDFInfo
- Publication number
- KR20130129246A KR20130129246A KR20137018638A KR20137018638A KR20130129246A KR 20130129246 A KR20130129246 A KR 20130129246A KR 20137018638 A KR20137018638 A KR 20137018638A KR 20137018638 A KR20137018638 A KR 20137018638A KR 20130129246 A KR20130129246 A KR 20130129246A
- Authority
- KR
- South Korea
- Prior art keywords
- sensor unit
- femur
- patient
- pelvis
- pelvic
- Prior art date
Links
Images


























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/32—Joints for the hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1703—Guides or aligning means for drills, mills, pins or wires using imaging means, e.g. by X-rays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/1742—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip
- A61B17/1746—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip for the acetabulum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/1764—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3937—Visible markers
- A61B2090/3945—Active visible markers, e.g. light emitting diodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0077—Devices for viewing the surface of the body, e.g. camera, magnifying lens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
- A61B5/1114—Tracking parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique
- A61B5/1127—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique using markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/02—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computerised tomographs
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4603—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4609—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof of acetabular cups
Abstract
본 발명은 수술 중에 두 강성 본체의 상대 위치를 결정하고, 모니터링하고, 표시하기 위한 방법 및 시스템에 관한 것이다. 특히, 본 발명은 수술 중에 뼈에 대해 보철물을 위치결정하기 위한 방법 및 시스템과, 인접한 뼈들의 최종 상대 위치를 확인하기 위한 시스템 및 방법에 관한 것이다.
Description
관련 출원에 대한 상호 참조
본 출원은 2010년 12월 17일자 출원된 미국 가 특허 출원 제61/424,447호의 35 U.S.C. § 119(e) 하에서 이익을 주장하며 그 전체 개시내용은 전체가 본원에 참조로 포함되는 것이다.
본 개시내용은 일반적으로 수술 중에 2개의 강성 본체의 상대 위치를 결정하고, 모니터링하고, 표시하는 것에 관한 것이다. 특히, 본 개시내용은 수술 중에 뼈에 대해 보철물을 위치 정하기 위한 방법 및 장치, 및 인접 뼈의 최종 상대 위치를 확인하기 위한 시스템 및 방법에 관한 것이다.
관절 치환 수술은 기존 관절을 인공 보철 구성요소로 치환하는 것과 관련된다. 통상의 관절 치환 수술의 예로는 고관절 치환 수술 및 무릎 치환 수술을 들 수 있다. 고관절 치환 수술은 세 가지 유형으로 나누어질 수 있다: 일차성 치환 수술, 재치환 수술 및 표면치환 수술. 일차성 고관절 치환 수술 (또한, 고관절 전-치환 수술(Total Hip Arthroplasty) (THA)로도 칭함)은 대퇴골두 및 근위 대퇴 경부의 외과적 적출 및 비구 연골 및 연골 하골의 제거와 관련된다. 통상적으로, 인공 강내(canal)가 대퇴골두의 근위 골수 영역에 형성되며, 금속 대퇴골 보철물이 대퇴골 골수 강내로 삽입된다. 이후 비구 구성요소 또는 임플란트가 확장된 비구 공간에 근위 삽입된다.
고관절 표면치환 수술은, THA와 같이 비구 연골 및 연하 하골의 수술적 제거 및 후속 비구 보철물의 삽입과 관련된다. 표면치환 수술은 THA와는 달리, 대퇴골두의 적출이 아니라, 기존 대퇴골두에 비구 보철물과 정합하는 보철물 캡을 피복시키는 것과 관련된다. 고관절 표면치환 수술은 종종 미래의 재치환 수술의 경우 대퇴 골주를 보존하기 위해서 젊은 환자들에게 행해진다.
고관절 재치환 수술은 통상 인공 고관절이 감염, 풀림(loosening), 골절, 기계적 고장 또는 불안정 등의 요인으로 인해 고장 나는 경우에 행해진다. 고관절 재치환 수술은 통상 고장 원인에 따라서, 1개 이상의 고장 인공 보철물의 치환과 관련된다.
북미 및 유럽에서는 매년 거의 1,000,000개의 고관절이 치환 수술된다. 이들 수술 중 약 75%는 일차성 치환 수술이고, 15%는 재치환 수술이며, 10%는 표면치환 수술이다. 연구는 여러 요인으로 인해 해마다 고관절 치환 수술의 숫자가 증가할 것임을 보여준다.
고관절 치환 수술의 중요 측면은 골반에 대한 비구 구성요소 또는 임플란트의 적절한 정렬을 보장하는 것이다. 구체적으로, 연구는 골반에 대한 비구 구성요소 또는 임플란트의 적절한 정렬 실패가 조기 마모, 탈구되는 성향 및 환자의 불편함을 초래할 수 있다는 것을 보여준다.
고관절 치환 수술의 다른 중요 측면은 수술로 인한 다리 길이 및 오프셋(offset)의 변화가 허용가능하도록 보장하는 것이다. 통상적으로, 수술 결과로서 다리 길이 및 오프셋이 변화하지 않게 하는 것이 목표이다. 그러나, 외과의사는 교정 수단으로서 종종 다리 길이의 작은 변화를 도입할 수 있다.
본원에 기재된 시스템, 방법 및 장치의 실시예의 더 나은 이해를 위해서 및 이들이 어떻게 실행되는지를 보다 명확하게 나타내기 위해서, 예로서 첨부된 도면을 참조하여 이루어질 것이다:
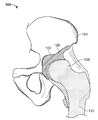
도 1은 건강한 고관절의 정면도이고;
도 2는 THA 이후의 고관절의 정면도이고;
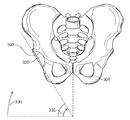
도 3a는 외전 각도(angle of abduction)를 도시하는 골반의 정면도이고;
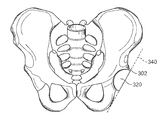
도 3b 및 도 3c는 전경 각도(angle of anteversion)를 도시하는 골반의 정면도이고;
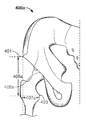
도 4a 및 도 4b는 고관절 치환 수술 전후 각각의 다리 길이 및 오프셋의 측정을 도시하는 고관절의 비교도이며;
도 5는 적어도 일 실시예에 따른 고관절 치환 수술을 위한 수술용 네비게이션 시스템의 시스템 블록선도이고;
도 6은 피부 또는 다른 연조직을 통해 핀 또는 골나사가 골반에 삽입되는 환자의 고관절의 측면도이고;
도 7a는 센서 유닛의 일 실시예이고;
도 7b는 센서 유닛의 다른 실시예이고;
도 7c는 센서 유닛의 다른 실시예이고;
도 7d는 센서 유닛의 다른 실시예이고;
도 7e는 센서 유닛의 다른 실시예이고;
도 7f는 마커 어레이의 실시예이고;
도 8은 골반에서 핀 또는 골나사를 통해 골반에 결합되는 센서 유닛을 갖는 환자의 고관절의 측면도이고;
도 9a는 스타일러스의 등축도이고;
도 9b는 센서 유닛이 결합된 도 9a의 스타일러스의 등축도이고;
도 10은 스타일러스 및 센서 유닛이 부착된 비구 임플란트 삽입 기구의 등축도이고;
도 11은 일 실시예에 따라서 장치의 하나의 아암(arm) 상에 센서 유닛을 갖고 골반과 접촉하는 골반 정합 장치이고;
도 12는 골반 상의 랜드마크와 접촉하는 센서 유닛을 구비한 스타일러스와 함께, 센서 유닛이 부착된 환자의 골반의 측면도이며;
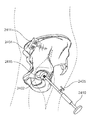
도 13은 센서 유닛이 부착된 환자의 골반, 및 골나사 또는 핀을 통해 센서 유닛이 부착된 대퇴골의 측면도이고;
도 14는 센서 유닛이 부착된 환자의 골반, 및 환자의 비구 근처에 위치하고 센서 유닛이 부착된 비구 리밍(reaming) 기구의 측면도이고;
도 15는 센서 유닛이 부착된 환자의 골반, 및 센서 유닛이 부착된 비구 임플란트 삽입 기구의 측면도이고;
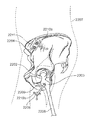
도 16은 센서 유닛이 부착된 환자의 골반, 및 보철 대퇴골 구성요소가 설치되고 인공 관절이 조립된 이후에 골나사 또는 핀을 통해 센서 유닛이 부착된 환자의 대퇴골의 측면도이고;
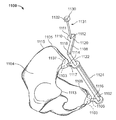
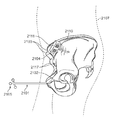
도 17은 골반에서 핀 또는 골나사를 통해 골반에 결합되는 센서 유닛의 일 실시예를 갖는 환자의 골반의 측면도이고;
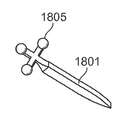
도 18a는 다른 스타일러스의 등축도이고;
도 18b는 마커 어레이가 결합된 도 18a의 스타일러스의 등축도이고;
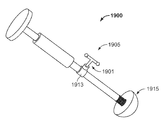
도 19는 마커 어레이가 부착된 비구 임플란트 삽입 기구의 등축도이고;
도 20은 골반과 접촉하고, 장치의 하나의 아암 상에 마커 어레이를 갖는 다른 골반 정합 장치이고;
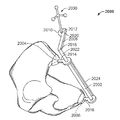
도 21은 센서 유닛이 부착된 환자의 골반, 및 골반 상의 랜드마크와 접촉하고 마커 어레이가 연결된 스타일러스의 측면도이고;
도 22는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 골나사 또는 핀을 통해 마커 어레이가 부착된 환자의 대퇴골의 측면도이고;
도 23은 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 마커 어레이가 부착된 비구 리밍 기구의 측면도이고;
도 24는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 마커 어레이가 부착된 비구 임플란트 삽입 기구의 측면도이고;
도 25는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 보철 대퇴골 구성요소가 설치된 이후에 골나사 또는 핀을 통해 마커 어레이가 부착된 환자의 대퇴골의 측면도이고;
도 26은 일 실시예에 따라 THA를 수행하는 방법의 흐름도이고;
도 27은 일 실시예에 따른 고관절 치환 수술 중에 수술용 네비게이션 기구를 포함한 시스템을 사용하는 방법의 흐름도이고;
도 28a는 일 실시예에 따라 뼈의 미리 결정된 형상에 대하여 제1 센서 유닛의 상대 위치를 결정하는 방법의 흐름도이고;
도 28b는 다른 실시예에 따라 뼈의 미리 결정된 형상에 대하여 제1 센서 유닛의 상대 위치를 결정하는 방법의 흐름도이고,
도 29는 일 실시예에 따라 뼈 및 강성 본체의 상대 위치를 결정하는 방법의 흐름도이고,
도 30은 제시된 시스템 및 방법을 실행하는 데 사용되는 컴퓨터 시스템의 개략도이다.
도시의 간략화 및 명확성을 위해서, 도면에 나타낸 구성요소는 반드시 스케일대로 도시되지 않음을 이해할 수 있을 것이다. 예를 들어, 일부 구성요소의 치수는 명확성을 위해 다른 구성요소에 대하여 과장될 수 있다. 또한, 적절히 고려하면, 도면 중에서 상응하거나 또는 상동하는 구성요소를 나타내기 위해 유사한 참조 번호가 사용될 수 있다 (예를 들며, 도 8의 참조 센서(811)는 도 12의 참조 센서(1211)와 유사함).
도 1은 건강한 고관절의 정면도이고;
도 2는 THA 이후의 고관절의 정면도이고;
도 3a는 외전 각도(angle of abduction)를 도시하는 골반의 정면도이고;
도 3b 및 도 3c는 전경 각도(angle of anteversion)를 도시하는 골반의 정면도이고;
도 4a 및 도 4b는 고관절 치환 수술 전후 각각의 다리 길이 및 오프셋의 측정을 도시하는 고관절의 비교도이며;
도 5는 적어도 일 실시예에 따른 고관절 치환 수술을 위한 수술용 네비게이션 시스템의 시스템 블록선도이고;
도 6은 피부 또는 다른 연조직을 통해 핀 또는 골나사가 골반에 삽입되는 환자의 고관절의 측면도이고;
도 7a는 센서 유닛의 일 실시예이고;
도 7b는 센서 유닛의 다른 실시예이고;
도 7c는 센서 유닛의 다른 실시예이고;
도 7d는 센서 유닛의 다른 실시예이고;
도 7e는 센서 유닛의 다른 실시예이고;
도 7f는 마커 어레이의 실시예이고;
도 8은 골반에서 핀 또는 골나사를 통해 골반에 결합되는 센서 유닛을 갖는 환자의 고관절의 측면도이고;
도 9a는 스타일러스의 등축도이고;
도 9b는 센서 유닛이 결합된 도 9a의 스타일러스의 등축도이고;
도 10은 스타일러스 및 센서 유닛이 부착된 비구 임플란트 삽입 기구의 등축도이고;
도 11은 일 실시예에 따라서 장치의 하나의 아암(arm) 상에 센서 유닛을 갖고 골반과 접촉하는 골반 정합 장치이고;
도 12는 골반 상의 랜드마크와 접촉하는 센서 유닛을 구비한 스타일러스와 함께, 센서 유닛이 부착된 환자의 골반의 측면도이며;
도 13은 센서 유닛이 부착된 환자의 골반, 및 골나사 또는 핀을 통해 센서 유닛이 부착된 대퇴골의 측면도이고;
도 14는 센서 유닛이 부착된 환자의 골반, 및 환자의 비구 근처에 위치하고 센서 유닛이 부착된 비구 리밍(reaming) 기구의 측면도이고;
도 15는 센서 유닛이 부착된 환자의 골반, 및 센서 유닛이 부착된 비구 임플란트 삽입 기구의 측면도이고;
도 16은 센서 유닛이 부착된 환자의 골반, 및 보철 대퇴골 구성요소가 설치되고 인공 관절이 조립된 이후에 골나사 또는 핀을 통해 센서 유닛이 부착된 환자의 대퇴골의 측면도이고;
도 17은 골반에서 핀 또는 골나사를 통해 골반에 결합되는 센서 유닛의 일 실시예를 갖는 환자의 골반의 측면도이고;
도 18a는 다른 스타일러스의 등축도이고;
도 18b는 마커 어레이가 결합된 도 18a의 스타일러스의 등축도이고;
도 19는 마커 어레이가 부착된 비구 임플란트 삽입 기구의 등축도이고;
도 20은 골반과 접촉하고, 장치의 하나의 아암 상에 마커 어레이를 갖는 다른 골반 정합 장치이고;
도 21은 센서 유닛이 부착된 환자의 골반, 및 골반 상의 랜드마크와 접촉하고 마커 어레이가 연결된 스타일러스의 측면도이고;
도 22는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 골나사 또는 핀을 통해 마커 어레이가 부착된 환자의 대퇴골의 측면도이고;
도 23은 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 마커 어레이가 부착된 비구 리밍 기구의 측면도이고;
도 24는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 마커 어레이가 부착된 비구 임플란트 삽입 기구의 측면도이고;
도 25는 센서 유닛의 일 실시예가 부착된 환자의 골반, 및 보철 대퇴골 구성요소가 설치된 이후에 골나사 또는 핀을 통해 마커 어레이가 부착된 환자의 대퇴골의 측면도이고;
도 26은 일 실시예에 따라 THA를 수행하는 방법의 흐름도이고;
도 27은 일 실시예에 따른 고관절 치환 수술 중에 수술용 네비게이션 기구를 포함한 시스템을 사용하는 방법의 흐름도이고;
도 28a는 일 실시예에 따라 뼈의 미리 결정된 형상에 대하여 제1 센서 유닛의 상대 위치를 결정하는 방법의 흐름도이고;
도 28b는 다른 실시예에 따라 뼈의 미리 결정된 형상에 대하여 제1 센서 유닛의 상대 위치를 결정하는 방법의 흐름도이고,
도 29는 일 실시예에 따라 뼈 및 강성 본체의 상대 위치를 결정하는 방법의 흐름도이고,
도 30은 제시된 시스템 및 방법을 실행하는 데 사용되는 컴퓨터 시스템의 개략도이다.
도시의 간략화 및 명확성을 위해서, 도면에 나타낸 구성요소는 반드시 스케일대로 도시되지 않음을 이해할 수 있을 것이다. 예를 들어, 일부 구성요소의 치수는 명확성을 위해 다른 구성요소에 대하여 과장될 수 있다. 또한, 적절히 고려하면, 도면 중에서 상응하거나 또는 상동하는 구성요소를 나타내기 위해 유사한 참조 번호가 사용될 수 있다 (예를 들며, 도 8의 참조 센서(811)는 도 12의 참조 센서(1211)와 유사함).
본원에 기재된 예시적인 실시예의 완전한 이해를 제공하기 위해서 다수의 구체적인 상세내용이 기술되는 점을 이해할 수 있을 것이다. 그러나, 당업계의 기술자는 본원의 기재된 실시예가 이들 구체적인 상세내용 없이도 실시될 수 있다는 점을 이해할 수 있을 것이다. 다른 경우, 본원에 기재된 실시예가 불분명해지지 않도록 공지된 방법, 절차 및 구성요소는 상세히 기재되지 않는다. 또한, 본 설명은 본원에 기재된 실시예의 범주를 조금도 제한하는 것으로 간주되어서는 안 되며, 단지 본원에 기재된 다양한 실시예의 실시를 설명한다.
개시된 실시예는 수술 중에 보철물의 정렬, 위치결정 및 크기설정(sizing)을 위한 방법 및 장치에 관한 것이다. 예시적인 방법 및 시스템은 신체 부분과 보철물의 위치 관계, 신체 부분과 다른 신체 부분의 위치 관계, 신체 부분과 기구의 위치 관계 및 보철물과 기구의 위치 관계를 결정하는 것에 관한 것이다. 용어 "위치 관계"는 좌표계 사이에서 강성 본체 변형 (예를 들어, 균일한 변형)을 의미한다. 직교 공간 (즉, 3D 공간)에서, 강성 본체 변형은 6 자유도 (DOF): 병진 위치의 경우 3-DOF 및 회전 또는 배향 위치의 경우 3-DOF로 구성된다. 본 출원에서, 용어 "위치 관계" 또는 "상대 위치"는 1 내지 6 DOF를 포괄한다. 위치 관계의 DOF의 개수는 명백히 기술되거나 (예를 들어, 2-DOF), 또는 맥락에 의해 시사될 수 있다 (예를 들어, 3-DOF는 일반적으로 배향을 기재하는데 필요함). 일부 예에서, 위치 관계는 우선 6-DOF 위치를 결정한 이후, 기재된 원하는 위치 정보를 6-DOF 미만으로 발췌함으로써 결정된다. 보다 일반적으로, "위치 관계"는 2개의 강성 본체와 이들의 상응하는 좌표계 사이의 위치를 결정하는 것을 시사하며, 2개의 강성 본체 중 어느 것도 전체 좌표계에 대해 "고정된" 것으로 간주되지 않는다.
일 실시예에서, 제1 (또는 기준) 센서 유닛이 신체 부분, 예를 들어 골반에 부착된다. 신체 부분 (즉, 골반)과 제1 센서 유닛의 상대 위치는 반드시 측정되어야 한다. 이는 통상 당업계의 기술자에게 "정합(registration)"으로 지칭되는 것이다. 골반 정합을 수행하기 위한 방법이 공지되어 있다. 일 정합 방법은 수술중(intra-operative) 영상을 사용하는 것과 관련된다. 다른 정합 방법은 센서 유닛과 신체 부분 상의 적어도 3개의 랜드마크 (또는 기준 위치)의 위치결정하는 것과 관련된다. 제2 센서 유닛을 갖는 외과 기구는 3개의 랜드마크 (또는 기준 위치)와 동시적으로 또는 연속적으로 접촉할 수 있다. 신체 부분에 부착된 제1 센서 유닛과, 외과 기구 상의 제2 센서 유닛의 조합에 의해 적어도 3개의 랜드마크 또는 기준 위치 (및 따라서 신체 부분 그 자체)에 대한 신체 부분 상의 제1 센서 유닛의 상대 위치를 결정할 수 있다. 일 실시예에서, 정합은 오직 골반과 제1 센서 유닛의 3-DOF 상대 회전 위치 (즉, 배향)만을 결정한다.
다른 실시예에서, 신체 부분에 대한 보철물의 배향은 센서 유닛을 사용하여 결정된다. 이러한 센서 유닛은 비제한적으로 방사체 또는 마커 및/또는 센서를 포함할 수 있다. 하나의 센서 유닛이 신체 부분에 부착될 수 있으며, 다른 센서 유닛이 외과 기구에 부착될 수 있다. 센서/마커의 조합에 의해 외과 기구 (보철물이 부착됨) 및 신체 부분의 상대 3차원 배향을 측정할 수 있다.
다른 실시예에서, 2개의 신체 부분의 상대 위치는 2개의 센서 유닛을 사용하여 측정된다. 예를 들면, 고관절 치환 수술에서, 대퇴골에 대한 골반의 상대 위치, 또는 대퇴골 상의 지점을 결정하는 것을 기대할 수 있다. 이는 하나의 신체 부분 (즉, 골반)에 제1 (또는 기준) 센서 유닛을 부착하고, 다른 신체 부분 (즉, 대퇴골)에 다른 센서 유닛을 부착하여, 센서 유닛의 조합에 의해 2개의 신체 부분 사이의 상대 위치를 측정할 수 있게 함으로써 달성될 수 있다.
설명의 용이를 위해서, 본 방법 및 시스템은 THA 중에 비구 및 대퇴골 임플란트를 정렬하는 것에 관해 기재될 것이다. 그러나, 당업계의 기술자에게는 본원에 기재된 방법 및 시스템이 다른 종류의 고관절 치환 수술, 즉 고관절 표면치환 수술, 고관절 재치환 수술과, 보철물을 삽입하는 다른 외과 수술, 예컨대 무릎 치환 수술에 적용될 수 있다는 것은 자명할 것이다.
I. 고관절 전-치환 수술의 설명.
보철 구성요소 또는 임플란트를 정렬하기 위한 방법 및 시스템의 실시예에 관한 상세한 설명을 진행하기 이전에, 고관절 전-치환 수술 (THR) 또는 THA의 간략한 설명을 도 1 내지 4를 참조하여 제공한다.
우선 건강한 인간 고관절(100)이 도시되는 도 1을 참조한다. 도 1로부터 볼 수 있는 바와 같이, 고관절(100)은 비구 연골(106)이 내부에 덧대진 골반골(104)에 소켓(102) (비구라고 지칭함)을 포함한다. 건강한 개인의 경우, 대퇴골(110)의 상단부에 있는 대퇴골두(108)가 비구(102)에 수용된다.
이제, THR 또는 THA 수술 후의 인간 고관절(200)이 도시되는 도 2를 참조한다. THR 또는 THA 중에, 비구(202)가 리밍되며 (즉, 도 1의 비구 연골(106)이 제거되고), 비구 구성요소 또는 임플란트(220)가 비구(202)에 부착된다. 대퇴골(210)의 대퇴골두 (예를 들어, 도 1의 대퇴골두(108))가 또한 제거된다. 구체적으로, 대퇴골(210)은 공지된 방법에 따라서 확장되고, 볼 및 스템 구성요소(211) (대퇴골 구성요소로 지칭함)가 확장된 대퇴골(210) 내로 삽입된다.
THA의 중요 측면은 골반에 대한 비구 구성요소 또는 임플란트의 적절한 정렬을 보장하는 것이다. 구체적으로, 연구는 골반에 대한 비구 구성요소 또는 임플란트의 적절한 정렬 실패가 조기 마모, 탈구되는 성향 및 환자의 불편함을 초래할 수 있다는 것을 보여준다.
골반의 해부학적 구조에 대한 비구 구성요소 또는 임플란트(220)의 배향은 외전 각도 및 전경 각도에 의해 정의된다. 이제, 외전 각도 및 전경 각도를 나타내기 위한 비구 임플란트(320)를 갖는 골반의 정면도를 모두 도시하는 도 3a, 도 3b 및 도 3c를 참고한다. 도 3a에서, 외전의 방향은 화살표(330)로 표시되며, 외전 각도는 각도(332)로 표시된다. 일반적으로 말해서, 외전은 비구(302) 내에서 비구 구성요소 또는 임플란트(320)의 측면 피봇팅을 나타낸다.
이제, 도 3a 내지 도 3c를 참조하면, 전경의 방향은 화살표(333)로 표시된다. 도 3b는 전경 각도가 0도인 비구 임플란트(320)를 나타낸다. 임플란트의 소켓을 판독자가 볼 수 있도록, 축(340)에 대한 비구 임플란트(320)의 회전은 양의 전경 각도를 구성한다. 예를 들어, 도 3c의 비구 임플란트(320)는 양의 전경 각도를 갖는다. 일반적으로 말해서, 전경은 비구(302) 내에서 비구 구성요소 또는 임플란트(320)의 수직 방향 (즉, 수술 테이블 위에 얼굴을 위로하여 누워있는 환자에 대하여 수직 방향)의 기울임(tilting)을 나타낸다. 외전 및 전경은 작동적으로, 방사선적으로 및 해부학적으로 정의될 수 있다.
연구는 전형적인 건강한 환자의 경우, 외전의 범위가 이상적으로 30도 내지 50도이고, 전경의 범위가 이상적으로 5도 내지 25도라는 것을 보여준다.
또한, 고관절 치환의 성공적인 결과에 매우 바람직한 것은, 원하는 최종의 다리 길이, 오프셋 및 대퇴골 회전 중심을 달성하는 것이다. 신체의 해부학적 구조에 대한 다리 길이 및 오프셋의 정의는 문헌에 문서화되어 있고, 당업계의 기술자에게 공지되어 있다. 도 4a 및 도 4b를 참조하면, 전방-후방도로부터 치환 이전의 고관절 및 대퇴골(400a) (도 4a) 및 치환 이후의 고관절 및 대퇴골(400b) (도 4b)를 나타낸다. 본래 다리 길이(405a) 및 오프셋(407a)은 골반(401) 상의 랜드마크 (또는 기준 위치)와 대퇴골(403) 상의 랜드마크 사이의 벡터의 성분들이다. 최종 다리 길이(405b) 및 오프셋(407b)은 골반(401) 및 대퇴골(403) 상의 동일한 랜드마크 사이의 벡터의 성분들이다. 최종 다리 길이(405b) 및 오프셋(407b)은 대퇴골(408b)의 회전 중심 (COR)의 위치, 및 대퇴골 임플란트의 치수에 의해 결정된다. 본래 다리 길이(405a) 및 오프셋(407a)은 사전-작동식 스캔 (예를 들어, x-선, CT 스캔, 및 MRI), 및 본래 대퇴골 COR(408a)을 사용하여 측정된다. 다리 길이 및 오프셋의 바람직한 변화율은 원하는 최종 다리 길이 및 오프셋과, 본래 다리 길이(405a) 및 오프셋(407a)에 기초하여 산출될 수 있다.
보철 관절의 성공적인 수술 및 원하는 이동성 및 내구성을 얻는데 도움이 되도록, 최종 다리 길이(405b) 및 오프셋(407b)이 본래 다리 길이(405a) 및 오프셋(407a)에 대하여 사전-작동식으로 결정되는 원하는 값과 일치하는 것이 중요할 수 있다. 원하는 최종 다리 길이 및 오프셋은 수술 중에 (센서 유닛을 사용하여) 다리 길이 및 오프셋을 모니터링하고, 다리 길이 및 오프셋에 원하는 변화를 가져옴으로써 달성될 수 있다. 또한, 대퇴골 COR 위치의 전방-후방 변화를 포함한 작동 전후의 대퇴골 COR 위치를 결정하는 것이 바람직할 수 있다. 이는 센서 유닛을 사용하여 달성될 수 있다.
II
. 장치의 시스템 수준 설명.
이제, 본 발명의 일 실시예에 따라서 신체 부분과 신체 부분의 상대 위치, 신체 부분과 보철물의 상대 위치, 신체 부분과 기구의 상대 위치 및 기구와 보철물의 상대 위치를 측정하기 위한 시스템(500)이 도시되는 도 5를 참조한다. 예시적인 시스템(500)은 복수의 센서 유닛(502, 503, 504, 505, 및 506)을 포함하며, 이들은 연결되는 구성요소들 사이의 상대 위치를 측정하기 위해 협력한다 (도 5에 나타낸 연결은 유선 또는 무선 전송을 나타냄). 제1 센서 유닛 (또는 기준 센서 유닛)(502)은 예를 들어, 환자의 골반으로 핀 또는 골나사를 고정하고, 나사결합, 클립핑 또는 다르게는 제1 (또는 기준 센서 유닛)(502)을 핀 또는 골나사에 장착함으로써 환자(507)의 골반에 작동가능하게 연결되며, 이는 이하에 추가로 논의될 것이다. 제2 센서 유닛(503)은 센서 위치결정 장치(508)에 작동가능하게 연결된다. 추가의 센서 유닛(504, 505, 및 506)은 각각 환자의 대퇴골(507), 비구 보철물 삽입 기구(509) 및 리밍 장치(530)에 작동가능하게 연결된다. 이하에 보다 상세히 기재되는 바와 같이, 각각의 센서(503, 504, 505, 및 506)는 마커 또는 마커 어레이로 교체될 수 있다.
비구 보철물 삽입 기구(509) 및 리밍 장치(530)는, 시스템(500)의 일부를 형성할 수 있고 고관절 치환 수술 중에 통상 사용되는 외과 기구 (또는 강성 본체)의 단지 일례이다. 당업자는 환자의 대응하는 신체 부분 또는 뼈에 다른 의료용 보철물을 부착하기 위해 사용되는 다른 외과 장치가 또한 본원에서 고려될 수 있다는 것을 이해할 수 있을 것이다. 또한, 시스템(500)은 프로세서(512), 표시 장치(514), 및 데이터베이스(516)를 포함할 수 있는 컴퓨팅 장치(511)를 포함할 수 있다.
표시 장치(514)는 외과 수술에 관계된 정보를 표시할 수 있다. 통상적으로, 표시된 정보는 외과 의사, 예를 들어 고관절 치환 수술 중에 정형외과 의사를 위한 것이다. 표시 장치(514)는 컴퓨터 모니터, 텔레비전, LCD 터치스크린, 세븐 세그먼트 표시 장치, 태블릿, 스마트폰 또는 임의의 다른 유형의 표시 장치일 수 있다. 표시 장치(514)는 현재 수술실에 통합되는 독립형 유닛이거나, 또는 외과 기구, 예를 들어 (509, 530)에 부착될 수 있다. 표시되는 정보는 신체 부분, 기구 또는 보철물의 상대 위치 정보를 포함할 수 있지만, 이에 제한되는 것은 아니다. 일 실시예에서, 표시 장치(514)는 비구 구성요소의 외전 각도 및 전경 각도를 나타낸다. 다른 실시예에서, 표시 장치(514)는 리밍 깊이 및 각도 정보를 나타낸다. 다른 실시예에서, 표시 장치(514)는 다리 길이 및 오프셋의 변화를 나타낸다. 또한, 수술 관련 다른 정보가 표시될 수 있다. 예를 들어, 가능한 경우 의료용 영상과, 외과 수술과 관련된 다양한 외과 기구 및 뼈의 실시간 이동을 추적하는 재현 (예를 들어, 증강 현실 재현)이 함께 표시될 수 있다.
예시적인 실시예에서, 컴퓨팅 장치(511)는 센서 유닛(502, 503, 504, 505, 506) 중 적어도 하나 및 표시 장치(514)와 인터페이싱한다. 컴퓨팅 장치(511)는 센서 데이터를 수신하고, 이를 처리하여 상대 위치 정보를 결정한다. 일 실시예에서, 프로세싱은 확장 칼만 필터 (EKF), 또는 그의 변형물 (즉, 반복 EKF)의 사용을 포함한다. 다른 실시예에서, 프로세서(512)는 비선형 반복 솔버, 예컨대 레벤버그-마쿼트(Levenberg-Marquardt) 방법을 포함한다. 컴퓨팅 장치(511)가 수용하는 센서 데이터는 원하는 상대 위치 데이터를 결정하기에 충분한 정보를 포함한다 (다시 말해서, 원하는 상대 위치 데이터는 바람직하게는 적어도 국부적으로 관찰가능하게 제시되며 센서 정보 - 사용되는 용어 "국부적으로 관찰가능하게"는 제어 및 예측 분야에서 통상 이해되는 것임). 컴퓨팅 장치(511)는 데이터를 포맷하고, 일부 실시예에서는 포맷된 데이터를 저장용 데이터베이스(516)에 전송할 수 있다. 상대 위치를 결정하기 위해 반드시 필요한 것은 아니지만, 외과 수술과 관련된 추가의 정보 (예를 들어, 날짜, 시간 및 환자의 개인 정보)가 또한 저장용 데이터베이스(516)에 전달될 수 있다. 데이터베이스(516)는 수술실에, 병원에, 중앙 의료 정보 보관소에, 또는 안전한 데이터 저장이 가능한 임의의 다른 지점에 위치할 수 있다.
또한, 컴퓨팅 장치(511)는 표시 장치(514)에 처리된 데이터를 전송할 수 있고, 다른 사용자 입력 장치, 예컨대 키보드 또는 마우스 (미도시)를 포함할 수 있으며, (514)에 표시된 정보를 교류하기 위해 사용될 수 있다. 또한, 컴퓨팅 장치(511)는 의료용 영상 데이터 (예를 들어, x-선, CT 스캔, MRI)와 인터페이싱될 수 있으며, 차례로 이 데이터를 표시 장치(514)에 표시할 수 있다.
A. 고관절 보철 정렬 시스템 및 방법
많은 정형외과의는 고관절 치환 수술 중에 핀 또는 골나사를 골반에 체결한다. 도 6을 참조하면, 환자(607)의 골반(604)의 장골(601)에 견고하게 체결된 핀 또는 골나사(610)의 예가 도시되어 있다(점선 표시). 이 예에서는, 핀 또는 골나사(610)가 환자(607)의 피부와 다른 연조직을 통해 삽입되고, 작동가능한 연결(610)이 골반 위의 다른 위치(예, 외과적 창상)에도 가능하지만, 환자의 장골(601)에 나사체결 또는 타격에 의해 고정되어 있다. 하기 더 설명되는 바대로, 핀 또는 골나사(610)는 센서 유닛을 장착하는 인터페이스로 이용될 수 있다. 예컨대, 핀 또는 골나사(610)는 제1 (또는 기준 또는 골반) 센서 유닛(예, 도 5의 센서 유닛(502))을 환자(607)의 골반(604)에 장착하기 위해 사용될 수 있다. 또한, 유사한 핀 또는 골나사가 별개의 (또는 제2) 센서 유닛(예, 도 5의 센서(504))을 환자(607)의 대퇴골(미도시)에 장착하기 위해 사용될 수 있다. 센서 유닛은 핀 또는 골나사에, 예컨대, 센서를 환자 골반으로부터 연장하는 핀 또는 골나사의 나사 단부에 나사 결합함으로써, 또는 센서 유닛을 골나사 또는 핀의 단부에 클립핑함으로써 또는 다른 방식으로 체결함으로써 장착하기 위해 사용될 수 있다. 센서 유닛을 뼈에 작동가능하게 연결하는 다른 수단(예, 생체적합성 접착제)이 사용될 수 있음은 당업계 기술자에게 자명할 것이다.
도 7a 내지 도 7d를 참조하여, 4개의 상이한 센서 유닛(701, 711, 721, 731)이 설명된다. 도 7a, 도 7b, 및 도 7d는 적어도 하나의 광학 센서(각각 704, 714, 및 734)가 내장된 센서 유닛예(각각 701, 711, 및 731)를 제공한다.
광학 센서란 광을 수용할 수 있고 광원의 방향을 측정할 수 있는 임의 센서를 지칭한다. 통상의 광학 센서는 CMOS, CCD, 또는 다른 유형의 카메라일 수 있다. 광학 센서의 다른 예는 감광성 장치(PSD)이다. 광학 센서의 또 다른 예는 Baanto Inc. (Mississauga, ON)에서 공급하는 소위 쉐도우 센스 제품이다. 광학 센서의 다른 예들은 당업계 기술자에게 자명할 것이다. 일 실시예에서, 광학 센서는 적외선(IR) 광을 수용하나; 본원에서 광학 센서는 IR 스펙트럼의 광을 센싱하는 것에 국한되지 않는다.
도 7a 내지 도 7c는 마커(각각 705, 715, 및 725)를 구비한 센서 유닛예(각각 701, 711, 및 721)를 제공한다. (특히, IR 광학 센서가 사용되는) 일 실시예에서, 마커는 IR 마커이다. 통상의 기술자는 마커가 IR 다양성 구비를 요건으로 하기보다는 대응 광학 센서에 의해 획득된 이미지에 식별가능한 특징부로서 드러나는 임의 오브젝트를 포함해야 한다는 것을 이해할 것이다. 마커의 다른 예에는 역반사 마커(바람직하게는 마커를 향해 배향된 광 에너지원을 수반), 및 발광 다이오드(LED)가 포함되며, 이에 제한되지는 않는다. 마커(705, 715, 및 725)는 포인트 광원으로서 예시되어 있다. 또한 논-포인트 광원이 사용될 수 있고 포인트 광원을 능가하는 장점을 가질 수도 있다는 것이 당업계 기술자에게는 자명할 것이다.
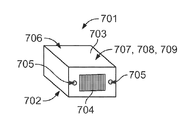
도 7a의 센서 유닛(701)을 참조하면, 센서 유닛(701)은 강성 본체(예, 뼈 또는 외과 기구)에 장착 브라켓(702)을 통해 결합될 수 있다. 예컨대, 센서 유닛(701)은 골나사 또는 핀(예, 도 6의 610)에 장착 브라켓(702)을 통해 결합될 수 있다. 센서 유닛(701)은 하우징(703)에 의해 둘러싸인다. 센서 유닛(701)은 적어도 하나의 광학 센서(704)를 포함하며, 광학 센서는 하우징(703)에 의해 차폐되지 않는다. 센서 유닛(701)은 2개의 마커(705)를 포함한다. 또한, 센서 유닛(701)은 하우징 내에 추가의 센서(706)를 포함할 수 있다. 추가의 센서(706)는 가속센서, 자이로스코프, 및 전기장측정기를 포함하나, 이에 제한되지 않는다.
프로세서(707)가 센서 유닛(701) 내에 내장될 수 있다. 내장된 프로세서(707)는 아날로그 데이터를 디지털 데이터로 전환시킬 수 있고, 데이터를 필터링 또는 다른 방식으로 컨디셔닝시켜 통신 채널(709)을 통한 전송을 위해 상기 데이터를 준비할 수 있다. 통신 채널(709)은 유선 또는 무선일 수 있고, 임의 적합한 프로토콜(예, RS-232, BlueTooth®, WiFi, USB, SPI, I2C, IR)를 통해 통신할 수 있다. 센서 유닛(701)은 전원(708)에 의해 급전받고, 전원은 내부 배터리 또는 외부 전력 케이블을 포함할 수 있으나, 이에 제한되지 않는다. 배터리를 전원(708)으로 사용하는 실시예에서, 센서 유닛(701)은 또한 재충전 단자(미도시)를 구비할 수 있다.
일반적으로, 센서 유닛은 복수의 마커를 구비할 수 있다. 예컨대, 도 7b는 센서 유닛예(811, 4개의 마커(715)를 구비)를 예시한다. 센서 유닛(711)은 그 외에는 센서 유닛(701)과 유사하다. 3개 초과의 마커가 센서 유닛에 배치되는 경우, 마커는 동일면에 놓이지 않도록(예컨대, 센싱이 보다 강력해 지도록) 배치되는 것이 유리할 것이다.
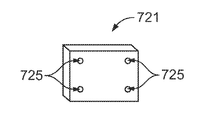
도 7c는 4개의 마커(725)를 구비하고 광학 센서는 구비하지 않은 센서 유닛(721)을 도시하고 있다. 센서 유닛(721)은 그 외에는 센서 유닛(701 및 711)과 유사하다. 앞서 언급한 바와 같이, 3개 초과의 마커가 사용되는 경우에는 마커 모두가 동일면에 위치하지는 않는 것이 유리하다.
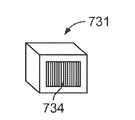
도 7d는 광학 센서를 구비하고 마커는 구비하지 않은 센서 유닛(731)을 예시한다. 센서 유닛(731)은 그 외에는 센서 유닛(701, 711, 및 721)과 유사하다.
일반적으로, 2개의 센서 유닛 사이의 6-DOF 상대 위치를 측정하기 위해, 적어도 하나의 광학 센서 및 적어도 3개의 마커가 2개의 센서 유닛 사이에 필요하다. 최소한의 광학 센서와 마커 조합을 초과하여 구비하는 것이 바람직하다. 6-DOF보다 적게 상대 위치를 측정하기 위해서는, 더 적은 수의 마커를 필요로 할 수 있다.
이제, 환자(807)의 골반(804)이 도시된 도 8을 참조한다(점선 표시). 핀 또는 골나사(810)는 환자의 골반(804)에 부착되고 센서 유닛(811)이 그에 장착되어 제1 (또는 기준 또는 골반) 센서 유닛으로 기능을 한다. 예시 목적으로, 센서 유닛(711, 도 7)이 제1 (또는 기준 또는 골반) 센서 유닛(811)으로서 선택되었다.
제1 (또는 기준 또는 골반) 센서 유닛(811)의 목적은 센서 측정치(기준의 골반 프레임에서)를 컴퓨팅 장치(예, 도 5의 511)에 제공하여, 최종적으로 시스템의 다른 구성요소들(예, 골반 뼈, 대퇴골, 외과 기구, 및 보철물) 간의 상대 위치 정보를 결정하는 것이다. 기준의 골반 프레임을 정합(registration) 등의 방법에 의해 센서 유닛(811)에 연관시킨다. 일 실시예에서, 정합은 제1 (또는 기준 또는 골반) 센서 (811)에 대해 환자 골반 상의 복수의 랜드마크 또는 기준 위치(예, 전상장골극(ASIS, 803), 하전장골극(AIIS, 817), 및 장골 능선(806)을 따른 지점)를 위치시킴으로서 수행된다.
도 9a 및 도 9b를 참조하면, 일 실시예에서, 제1 (또는 기준 또는 골반) 센서 유닛(예, 도 8의 811)에 대해 환자의 골반 상의 랜드마크(또는 기준 위치)를 위치 지정하기 위해 (센서와 함께) 사용될 수 있는 스타일러스(901)가 설명된다. 스타일러스(901)는 근위 단부(902) 및 원위 단부(903)를 갖는 강성 본체를 포함한다. 원위 단부(903)는 신체 부분 및/또는 다른 특징부 또는 랜드마크 (또는 기준 위치)에 접촉시키기 위해 사용되는 양호하게 규정된 접촉점을 가지며, 근위 단부(902)는 센서 유닛(905)을 수용하도록 구성된다. 센서 유닛(905)은 도 7에 도시된 센서 유닛(701, 711, 721, 또는 731) 중 하나일 수 있고, 또한 적어도 하나의 휴먼 인터페이스 센서, 예 버튼(906)을 구비할 수 있다. 버튼(906)은 센서 유닛(905) 내부의 프로세서(미도시)와 인터페이싱될 수 있다. 일 실시예에서, 스타일러스(901)는 골반 상의 랜드마크 또는 기준 위치(예, 도 8의 803, 817, 및 806)를 제1 (또는 기준 또는 골반) 센서 유닛(811, 도 8)에 대해 위치결정하는 것을 판정하기 위해 사용된다. 버튼(906)을 눌러, 컴퓨팅 장치 (예, 도 5의 511) 및/또는 제1 (또는 기준 또는 골반) 센서(예, 도 8의 811)에 스타일러스가 랜드마크 또는 기준 위치와 접촉되고, 따라서 센서 유닛(905)이 랜드마크 또는 기준 위치에 대해 미리 정해진 위치에 있다는 신호를 보낼 수 있다. 또한, 버튼(906)을 누르면 센서 유닛(905)의 상대 위치가 등록/저장되도록 할 수 있다.
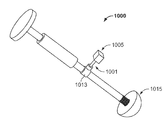
도 10을 참조하면, 센서 유닛(1005)이 부착된 비구컵 삽입 기구(1000)가 일 실시예에 따라 설명된다. 센서 유닛(1005)은 기구(1000)에 고정된다. 일 실시예에서, 센서 유닛(1005)은 센서(905, 도 9)와 동일한 센서이다. 일 실시예에서, 센서 유닛(1005)은 또한 스타일러스(901)가 부착된 센서(905, 도 9)와 동일한 센서이고, 스타일러스(901)는 비구컵 삽입 기구(1000)에 직접 부착되며, 이 실시예에서 스타일러스(901)는 스타일러스(901)의 자유 단부(903)를 커플러(1013) 내에, 예컨대 고정 나사(미도시)를 이용해 고정함으로써 기구(1000)에 고정될 수 있다. 다른 실시예에서, 기구(1000)와 일체로 형성될 수 있는 커플러(1013)에는 커플러(예 핀, 1001)의 일 단부 상의 상보적 나사산과 정합하는 나사산이 구비될 수 있고, 커플러(예, 핀 1001)의 타단부에는 센서 유닛(1005)에 구비된 상보적 나사와 정합하는 나사산이 구비될 수 있다. 나사 이용에 대한 대안으로, 예컨대, 기계적 클립을 사용하여 센서 유닛(1005)을 커플러(1001)에, 그리고 커플러(1001)를 기구(1000)의 커플러(1013)에 결합시킬 수 있다. 센서 유닛(1005)은 도 7을 참조하여 설명된 센서 유닛(701, 711, 721, 및 731) 중 어느 하나를 포함할 수 있다. 또한, 센서(1005)는 삽입 기구(1000)에 커플러(1001)를 통해 결합될 수 있고, 일 실시예에서, 커플러는 스타일러스(901)일 수 있다. 삽입 기구(1000)의 단부는 비구 보철 임플란트(또는 비구컵)(1015)를 홀딩한다. 센서 유닛(1005)은 기구(1000)에, 2개의 요소가 연결될 때 삽입 기구(1000)에 대한 센서 유닛(1005)의 상대 위치를 알 수 있도록 기지의 또는 측정가능한 배향으로 연결된다. 예컨대, 삽입 기구, 커플러, 및 센서를 기지의 치수 규격으로 그리고 3개 구성요소가 하나의 특정 양식으로만 조립될 수 있도록 제작되는 경우 3개 구성요소는 산출된 상대 위치에 따라 예측가능한 방식으로 조립될 수 있다. 사용된 하나 이상의 구성요소의 치수가 조정가능할 경우(예, 바로 하기 설명된 골반 정합 장치), 구성요소들의 상대 위치는 구성요소들 간의 거리 및 각도 배향을 측정함으로써 결정될 수 있다.
도 11에 설명된 다른 실시예를 참조하면, 골반 정합 장치(1100)를 사용하여 골반 상의 3개의 랜드마크 (또는 기준 위치)를 접촉시킬 수 있다. 일 실시예에서, 제1 및 제2 접촉 부재(1117, 1106)를 사용하여 각각의 ASIS 지점(1103)을 제1 및 제2 접촉 지점(각각 1107, 1109)에서 접촉 부재(1117, 1106) 상에 접촉시킬 수 있고, 제3 접촉 부재(1110)를 사용하여 장골 능선(1105) 상의 감지가능한 위치를 제3 접촉 부재(1110) 상의 제3 접촉 지점(1111)에 접촉시킬 수 있다. 다른 골반 랜드마크 (기준 위치)를 사용할 수 있으며, 이는 당업계 통상의 기술자에게 자명할 것이다(예, 하전장골극 또는 장골극, 치골 결절, 비구 림, 원인대 부착점 등). 장치예는 참조로 본원에 전체가 포함되는 PCT 공개 제WO/2010/063117호에 개시되어 있다. 제1 및 제2 접촉 부재(1117, 1106)는 제1 및 제2 조정가능 스탠드-오프(1114, 1116)에 부착되며, 이 스탠드-오프는 그 자체로 크로스-부재(1124)에 고정된다. 강성 부재 (또는 샤프트)(1102)는 길이축을 중심으로 자유롭게 회전할 수 있거나, 또는 회전할 수 없도록 클램핑될 수 있고, 스탠드-오프(1114)를 넘어 연장한다(스탠드-오프(1114)를 넘어 연장하는 강성 부재 또는 샤프트 부분은 1122로 표시). 제3 접촉 부재(1110)는 제3 스탠드-오프(1108)에 부착되고 이 스탠드-오프는 강성 부재 (또는 샤프트)(1102)의 연장 부분(1114)에 조인트(1118)를 통해 결합된다. 제3 스탠드-오프(1108)는 바람직하게는 강성 부재 (또는 샤프트)(1102)가 길이축을 중심으로 회전하면 상기 축을 중심으로 제3 스탠드-오프(1108)가 유사하게 회전하도록 강성 부재 (또는 샤프트)(1102)에 작동가능하게 결합된다. 비제한적인 예로서, 제3 스탠드-오프는 강성 부재 (또는 샤프트)(1102) (또는 스탠드-오프(1114)를 넘어 연장하는 강성 부재 또는 샤프트 부분(1122))와 일체로 형성 또는 용접될 수 있다.
제3 접촉 부재(1110)는 장골 능선(1105)을 따른 감지가능한 지점에 접촉하도록 적합하게 성형될 수 있다. 커플러(1131)는 제3 스탠드-오프(1108)에 연결되고 제2 센서 유닛(1130)은 커플러(1131)에 연결된다. 비제한적인 예로서, 커플러(1131)는 제3 스탠드-오프(1108) 및 제2 센서(1130)의 상보적 나사와 정합하도록 구성된 2개의 나사 단부를 구비한 핀일 수 있다. 커플러(1131)가 제3 스탠드-오프(1108)에 연결되는 것이 바람직하지만, 커플러가 대안적으로, 커플러(1131) (및 커플러(1131)에 결합되는 경우의 제2 센서 (1130))가 결합할 정합 장치의 별도 구성요소가 제3 스탠드-오프(1108)에 작동가능한 연결(즉, 회전축을 중심으로 한 제3 스탠드-오프(1108)의 회전에 의해 동일 회전축을 중심으로 한 유사한 회전이 유도)된다는 전제하에, 정합 장치(1100)의 별도 구성요소에 연결될 수 있음을 당업계 기술자는 이해할 것이다. 또한, 제2 센서 유닛(1130)이 골반 정합 장치(1100)의 구성요소에 커플러(1131)를 통해 결합되는 경우에 제1, 제2, 및 제3 접촉점(1107, 1109, 1111)에 대한 제2 센서 유닛(1130)의 상대 위치가 기지인 것이 바람직하다(즉, 골반 정합 장치(1100)에 결합된 경우 제2 센서 유닛(1130)은 제1, 제2, 및 제3 접촉점(1107, 1109, 1111) 각각에 대해 미리 정해진 관계를 갖는다.
이와 같이, 골반 정합 장치(1100)의 기계적 치수 전부는 고정된 또는 기지의 치수이거나, 조정가능하고 측정가능한 치수이다. 더욱이, 골반 정합 장치(1100)의 어느 곳에든 위치할 수 있는 적어도 하나의 휴먼 인터페이스 센서(예, 버튼(1132))가, 상기 장치(1100)가 환자의 골반에 대해 적소에 위치됨을 컴퓨팅 장치 (예, 도 5의 511)에 통신하기 위해 센서 유닛(1130)에 인터페이싱될 수 있다. 일 실시예에서, 버튼(1132)은 각각의 제1, 제2, 및 제3 접촉점(1107, 1109, 1111)에 3개의 압력 센서를 포함하여, 각 지점에서의 특정 압력이 컴퓨팅 장치(예, 도 5의 511)에 골반 정합 장치(1100)가 골반에 대해 원하는 위치에 있음을 표시하도록 한다.
골반 정합 장치(1100)를 사용하여, 도 9a 및 9b를 참조하여 설명된 스타일러스 실시예 대신 제1 (또는 기준 또는 골반) 센서 유닛(811)에 대해 골반 상의 랜드마크 또는 기준 위치(예, 도 8의 803, 817, 및 806)의 위치를 결정할 수 있다. 도 9의 제2 센서 유닛(905)과 유사하게, 제2 센서(1130)는 도 7에 도시된 센서 유닛(701, 711, 721, 또는 731) 중 하나이다.
도 12를 참조하여, 환자(1207)의 골반(1204)(점선으로 표시)에 대해 제1 (또는 기준 또는 골반) 센서 유닛(1211)의 상대 위치를 도 9의 스타일러스/센서 조합을 이용하여 결정하는 방법을 설명한다. 환자(1207)의 골반(1204)에 작동가능하게 연결된 제1 (또는 기준 또는 골반) 센서 유닛(1211)(예컨대, 상기 설명)에 있어서, 스타일러스(1201)는 스타일러스(1201)의 원위 단부(1202)를 이용하여 치골 결절(1208)(골반(1204) 상의 뼈 랜드마크)과 접촉하게 된다(도 12에 도시되 바대로). 스타일러스(1201)가 뼈 랜드마크(뼈에 직접 또는 피부 및 다른 연조직을 통해) 적절하게 결합된 때에, 버튼(1212)을 눌러 스타일러스(1201)가 결합된 것을 표시할 수 있고, 이로써 제2 센서 유닛(1205)으로부터 컴퓨팅 장치(예, 도 5의 511) 또는 제1 (또는 기준 또는 골반) 센서 유닛(1211)으로 통신 전송을 개시한다. 일 실시예에서, 제1 (또는 기준 또는 골반) 센서 유닛(1211) 및 제2 센서 유닛(1205)은, 센서들 중 하나가 적어도 하나의 카메라를 포함하고 다른 센서가 통신 전송 시에 적어도 하나의 카메라의 뷰필드 내에 놓인 대응 마커를 포함하도록 선택 및 위치 설정될 수 있다. 통신 전송 시에, 센서 유닛(1211 및 1205)에 이용가능한 종합 정보는 센서 유닛(1211 및 1205) 간의 상대 6-DOF 위치결정에 충분하다. 따라서, 통신 전송 시에 스타일러스(1201)와 접촉한 상태의 뼈 랜드마크에 대한 제1 (또는 기준 또는 골반) 센서(1211)의 6-DOF 위치가 결정될 수 있다.
일 실시예에서, 대퇴골에 맞추는 것이 요망될 수 있다(다리 길이/오프셋 결정에 흔히 사용). 이러한 실시예에서, 대퇴골에 따른 랜드마크를 스타일러스(1201)를 이용해 접촉시키는 것이 가능하다.
센서 유닛(1211 및 1205)의 특정 조합은 상대 위치를 결정하기에 충분한 정보를 제공하는 목적에 불충분할 수 있음을 당업계 기술자들은 이해할 것이다. 예컨대, 센서 유닛(도 7의 721(마커만을 포함, 카메라 불포함))을 센서 유닛(1211)으로서 사용한다면, 센서 유닛(721)은 센서 유닛(1205)으로 사용될 수 없을 수 있고, 그 반대도 마찬가지이다. 센서(731(카메라 포함 및 마커 불포함))가 센서 유닛(1211) 또는 센서 유닛(1205) 중 하나로서 사용된다면, 나머지 센서 유닛은 타입 711 또는 721이 바람직하다(즉, 적어도 3개의 마커를 포함하는 것이 바람직하다). 상대 위치결정에 충분한 종합 정보를 제공하지 않고, 또한 대응 측정수단을 구비하지 않는 센서(즉, 한 센서 상에 카메라가 있고, 대응 센서 상에 마크가 없는 경우)를 비롯하여 센서 유닛 유형의 많은 조합이 있다. 어떤 센서 유닛 조합이 적합한지(즉, 목적한 상대 위치가 위치적으로 관찰가능한지)가 당업계 기술자에게는 명확할 것이다.
제1 (또는 기준 또는 골반) 센서 유닛(1211)의 환자의 골반(1204)에 대한 상대 위치를 결정하기 위하여, 골반 상의 적어도 3개의 기지의 개별 랜드마크 (또는 기준 위치)의 위치를 식별하고 컴퓨팅 장치(예, 도 5의 511)에 저장한다. 가능한 뼈 랜드마크 (또는 기준 위치)의 일부 예는 치골 결절(1208), ASIS 지점(1203), AIIS 지점(1217), 장골 능선(1206)을 따른 지점 또는 비구(1216)와 관련된 뼈 랜드마크 (또는 기준 위치), 예 원인대의 부착 지점을 포함한다.
이제 도 11 및 도 12를 참조한다. 앞서 논의된 바대로, 또 다른 실시예에서, 도 11의 골반 정합 장치(1100)가 제1 (또는 기준 또는 골반) 센서 유닛(1211)의 환자(1207)의 골반(1204)에 대한 상대 위치결정에 사용될 수 있다(도 12에 점선으로 도시). 환자(1207)의 골반(1204)에 작동가능하게 연결된 제1 (또는 기준 또는 골반) 센서 유닛(1211)(예컨대, 상기 설명)에 있어서, 골반 정합 장치(1100)는 골반 상의 적어도 3개의 기지의 랜드마크 (또는 기준 위치)와 접촉하도록 된다. 제1, 제2, 및 제3 접촉점(1107, 1109, 및 1111) 각각에 대해 미리 결정된 관계를 갖거나 또는 측정가능한 제2 센서 유닛(1130)에 의해, 골반 정합 장치(1100)가 적어도 3개의 랜드마크 (또는 기준 위치)와 접촉되는 때에, 제1 (또는 기준 또는 골반) 센서 유닛(1211)의 제2 센서(1130)에 대한 상대 위치를 이용해 골반 뼈(1204)의 제1 (또는 기준 또는 골반) 센서 유닛(1211)에 대한 상대 위치를 결정할 수 있다.
도 4a 및 도 4b를 참조하여 앞서 논의된 대로, 고관절 치환 수술에서는, 수술 전후에 다리 길이 및 오프셋에서의 목적한 변화를 얻는 것이 매우 바람직할 것이다. 목적한 다리 길이 및 오프셋(예, 405b 및 407b)이 고관절 수술을 통해 수행되는 방법을 도시하는 도 13을 이제 참조한다. 환자의 골반(1304) 및 대퇴골(1306)이 도시되고, 대퇴골두(1301) 및 비구 영역(1302)이 수술 창상 내에 노출된다. 대퇴골(1306)의 골반(1304)에 대한 위치를 측정하기 위해, 대퇴골 센서 유닛(1305)을 대퇴골(1306)에 결합시킨다(예컨대, 대퇴골 내로의 나사 결합을 위한 일 단부 및 대퇴골 센서 유닛(1305) 상의 상보적 나사산과 정합하는 타 단부의 2개 나사 단부를 구비한 핀을 사용하여, 또는 대안적으로 핀을 대퇴골 내로 넣어 센서를 핀에 기계적으로 클립핑함으로써). 일 실시예에서, 센서 유닛(1305)을 대퇴골(1306)에 더 큰 전자(trochanter, 1309)에 인접하게 핀 또는 골나사(1310b)를 이용하여 결합시킨다. 또 다른 실시예에서, 센서 유닛(1305)은 기계적 또는 해부학적 대퇴골축을 따라 놓이도록 배치된다(예, 원위 대퇴골 근처에 경피적으로 결합될 수 있다).
수술 전후 다리 길이 및 오프셋에서의 변화를 측정하는 수종의 방법이 있다. 고관절 조정 기술에서, 일부 방법은 대퇴골두의 회전 중심(골두 중심으로 지칭)의 위치를 결정하는 것에 좌우된다. 이러한 방법은 대퇴골의 관절 연결 또는 대퇴골두 및/또는 비구의 정합을 포함한다. 일부 방법은, 다리 길이 및 오프셋을 나타내는 성분들로 거리 측정치를 분할하는 것에 의존한다. 이러한 방법은 기계적 및/또는 해부학적 대퇴골축 결정을 위해 대퇴골 정합을 수행하는 것을 포함한다.
대퇴골 센서 유닛(1305) 및 제1 (또는 기준 또는 골반) 센서 유닛(1311)에 의해 측정된 정보는 컴퓨팅 장치 (예, 도 5의 511)로 전송되고, 센서 유닛의 상대 위치, 따라서 골반(1304)과 대퇴골(1306)의 상대 위치를 결정하는 데 충분한 정보를 담고 있다. 이 정보는, 가능하게는 대퇴골두 중심 및/또는 대퇴골축 관련 정보와 함께 수술 전후에 측정될 수 있다. 수술후 측정된 정보와 수술 전에 측정된 정보의 비교(즉, 보철 구성요소를 이용한 고관절 정복)는 수술 결과로서 다리 길이 및 오프셋의 실제 변화를 산출할 수 있다. 마찬가지로, 대퇴골 위치의 전후방 변화를 측정할 수 있다. 실제 다리 길이 및 오프셋 변화가 미리 정해진 목적한 다리 길이 및 오프셋 변화와 일치하면 결과의 목적한 다리 길이 및 오프셋이 달성되었음을 의미한다. 대퇴골 센서 유닛(1305)에 대한 센서 유닛 옵션은 스타일러스 센서 유닛(905)(도 9)으로서 선택에 이용가능한 것으로 앞서 논의된 바와 동일한 옵션이다.
도 14를 참조하면, 비구 임플란트(예, 도 10의 1015) 삽입 전에, 비구(1402)를 리밍하여 뼈, 연골 및 다른 조직의 제거를 수행한다. 비구의 리밍은 예컨대 리밍 도구(1401)를 이용하여 수행할 수 있다. 리밍 센서 유닛(1405)은, 제1 (또는 기준 또는 골반) 센서 유닛(1411)과 리밍 센서(1405)의 조합이 리밍 도구(1401)의 골반(1404)에 대한 상대 위치를 결정하기 위한 충분한 정보를 측정하도록 리밍 도구(1401)에 결합될 수 있다(이는 소정의 제1 (또는 기준 또는 골반) 센서(1411)에 있어 리밍 센서 유닛(1405)이 대퇴골 센서(1305)와 동일한 방식으로 선택될 것을 요구한다). 리밍 도구(1401)의 골반뼈(1404)에 대한 상대 위치 측정 목적의 일례는 리밍 절차의 깊이, 각도 등을 측정하는 것이다. 리밍 센서 유닛(1405)은 리밍 도구(1401) 상의 상보적 나사산과 정합하는 일단부 및 리밍 센서 유닛(1405) 상의 상보적 나사산과 정합하는 타단부의 2개 나사 단부를 구비한 핀을 이용하여 결합될 수 있다. 또는, 핀을 리밍 센서 유닛(1405) 또는 마커 어레이와 일체로 형성할 수 있고(예, 도 23의 리밍 도구(2301) 참조), 리밍 도구(1401) 내의 나사산에 상보적인 나사산을 가질 수 있다. 다른 대안으로는 리밍 센서 유닛(1405) 내의 나사산에 상보적인 나사를 구비한 리밍 도구와 일체인 핀을 형성하는 것을 포함한다. 또한 기계적 클립을 나사 대신에 사용할 수 있다.
고관절 치환 수술의 다른 중요 인자는 비구 임플란트(예, 도 10의 1015)를 골반에 대해 정렬하는 것이다(특히, 외전 각도(도 3a의 332) 및 전경 각도(예, 도 3c의 333)참조). 도 15를 참조하면, 비구(1502)를 적절하게 리밍한 후, 비구 임플란트(1515)를 삽입 기구(1510)를 이용하여 비구(1502) 내로 삽입하고 수술용 햄머(미도시)를 이용하여 비구(1502)에 들어가게 타격한다. 비구(1502) 내로 삽입될 때까지, 비구 임플란트(1515)를 기지의 위치에 있는 삽입 기구(1510)에 결합시킨다(즉, 도구(1510)의 위치를 앎으로써 비구 임플란트(1515)의 위치를 알게 됨). 도 10의 삽입 기구(1000)와 유사하게, 도구 센서 유닛(1505)은 기지의 위치에 있는 삽입 기구(1510)에 결합된다. 컴퓨팅 장치(예, 도 5의 511)와 통신하는 센서 유닛(1511 및 1505)으로부터의 정보를 이용하여, 비구 임플란트(1515)의 골반(1504)에 대한 상대 위치가 결정될 수 있다. 특히, 비구 임플란트(1515)의 골반(1504)에 대한 상대 배향(즉, 외전 각도 및 전경 각도)을 결정할 수 있다. 외과의가 비구 임플란트(1515)의 골반에 대한 원하는 배향을 달성한 후에 외과의는 비구(1502) 내에 임플란트(1515)를 고정할 수 있다.
복수의 센서를 이용한 다리 길이 및 오프셋에서의 변화 측정은 도 13을 참조하여 앞서 논의되었다. 반복하면, 수술 중간 절차 중에 다리 길이 또는 오프셋의 임의 변화를 측정하는 것이 중요할 수 있다. 도 16은 목적하는 결과의 다리 길이 및 오프셋을 복수의 센서 유닛을 이용하여 수행하는 방법을 도시한다. 비구 보철물(1615) 및 대퇴골 보형물(1608, 또한 도 2의 208 참조)의 이식 후에 관절을 조립하거나 정복한다(전형적으로 먼저 크기 변화를 허용하는 시험용 구성요소를 이용해). 결과의 위치 설정은 결과의 실제 다리 길이(예 도 4b의 405b) 및 결과의 실제 오프셋(도 4b의 407b)을 포함한다. 대퇴골 상의 한 지점의 골반에 대한 위치의 초기 기준 측정 및 동일 지점의 관절 조립 후 위치 간의 변화를 산출할 수 있다. 이는 다리 길이 및 오프셋에서의 변화가 수술 전후에 둘 다 기록된 센서(1611, 골반(1604)에서) 및 1605(대퇴골에서)로부터의 종합 정보로부터 결정될 수 있음을 의미한다. 다리 길이 및 오프셋을 정확하게 측정하기 위하여, 대퇴골두 중심 위치를 산출하거나, 또는 대퇴골 위치 설정 절차(골두 중심 위치의 결정을 포함할 수 있음)를 이용하여 초기 측정과 정복 후 측정의 비교를 용이하게 하는 것이 유리할 수 있다(예, 초기 대퇴골 배향 복구시에 외과의에게 가이드를 제공).
B. 입체적 능동 센서 유닛의 일 실시예
앞 부분에서는, 기구와 신체 부분, 신체 부분과 다른 신체 부분, 및 신체 부분과 보철물의 상대 위치결정을 측정하기 위한 장치가, 특히 고관절 치환 수술을 위한 보철물의 구성요소의 정렬 및 크기설정의 맥락에서 개시되었다. 본 부분에서는, 유사한 기능을 갖는 본 장치의 일 실시예가 개시된다.
본 실시예에서는, 하나의 센서 유닛만이 광학 센서를 포함한다. 도 7e를 참조하면, 하우징(743) 및 하우징(743)에 의해 차단되지 않고 공지된 거리만큼 이격되어 있는 2개의 광학 센서(742a, 742b)를 갖는 센서 유닛(741)이 도시된다. 센서 유닛(741)은 가속도계 또는 자이로스코프와 같은 다른 유형의 센서(미도시)를 하우징(743) 내에 포함할 수도 있다. 또한, 센서 유닛(741)은 내부 프로세서에 인터페이싱된 휴먼 인터페이스 센서(예를 들어, 버튼)(746)(다수의 휴먼 인터페이스 센서가 고려됨)를 포함할 수 있다. 이 센서 유닛(741)은 외과용 기구 상의 상보적인 장착 브라켓과 접합하도록 구성되는 장착 브라켓(744)을 통해 (예를 들어, 스냅 결합(snap fit)에 의해, 또는 정합 나사를 통해), 예를 들어 골반에 장착될 수 있다. 이제, 3개의 상이한 마커 구성(751a, 751b, 751c)이 도시되어 있는 도 7f를 참조한다. 각각의 구성은 각각 마커(753a, 753b, 753c)와 연결되는 강성 본체(752a, 752b, 752c)를 갖는 센서 유닛이다. 마커는 전자기 에너지(예를 들어, 가시광, IR광)를 방출하거나 반사할 수 있다. 일 실시예에서, 마커가 방출하거나 반사하는 에너지의 유형은 사용되는 센서 유닛(741)의 유형에 대응한다. 마커를 포함하지만 처리 또는 감지 능력이 없는 센서 유닛은 대안적으로 "어레이"로 언급된다. 응용예에서 결정될 필요가 있는 위치결정 자유도에 따라 (예를 들어, 모두 6-DOF를 결정하기 위해서는 어레이마다 적어도 3개의 마커 필요), 임의 개수의 마커(753)로 단일 "어레이"(751)를 구성할 수 있다.
도 17을 참조하면, 환자(1707)의 골반 뼈(1704)에 부착되는 핀 또는 골나사(1710)에 부착되는 센서 유닛(1711)이 개시된다. 실제로, 센서 유닛은 바람직하게는 센서 유닛(1711)의 시야가 외과적 창상의 전반적인 영역을 포함하도록 뼈에 연결된다.
도 18a는 도 9a의 스타일러스(901)와 유사한 스타일러스(1801)를 예시한다. 도 18b는 마커 어레이(1805)가 결합된 도 18a의 스타일러스를 예시한다. 어레이(1805)는 예시적인 실시예에서 6-DOF 위치결정이 요구되기 때문에, 3개의 마커(그러나 더 많은 수를 포함할 수 있음)를 포함한다.
도 19는 도 10의 비구컵 삽입 기구(1000)와 유사한 비구컵 삽입 기구(1900)를 예시한다. 삽입 기구(1900)는 예를 들어, 전술한 바와 유사한 결합 기술을 사용하여 커플러(1913)를 통해 삽입 기구에 결합되는 마커 어레이(1905)를 포함한다. 어레이(1905)는 바람직하게는, 적어도 2개의 마커 지점을 포함한다(비구컵(또는 임플란트)의 적합한 위치결정은 2개의 배향 각도: 외전 각도(332)(도 3a) 및 전경 각도(333)(도 3c)에만 종속하는 2개의 지점만이 요구됨).
도 20에서는, 골반 정합 장치(2000)의 일 실시예가 예시된다. 이 장치는 바람직하게는 적어도 3개의 마커를 포함하는 마커 어레이(2030)가 센서 유닛(1130) 대신 사용된다는 점을 제외하고는 도 11의 골반 정합 장치(1100)와 동일하다. 일 실시예에서, 장치(2000)는 장치(1100)(도 11)와 동일한 목적으로 사용된다. 장치(2000)가 사용되는 경우, 장치(2000)가 통신 채널을 구비하지 않을 수 있도록, 장치(2000) 대신 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, 도 17의 "1711") 상에 휴먼 인터페이스 센서(예를 들어, 버튼)를 갖는 것이 바람직할 수 있다.
도 21에서는, 제1 (또는 기준 또는 골반) 센서 유닛(2111)에 대해 골반 상의 뼈 랜드마크의 위치(또는 기준 위치)가 결정될 수 있도록 하는 시스템이 예시된다. 스타일러스(2101) 및 어레이(2105)는 골반 상의 다양한 랜드마크(또는 기준 위치)(예를 들어, ASIS 지점(2103) 및 AIIS 지점(2117))와 접촉하는데 사용될 수 있다. 뼈 랜드마크(또는 기준 위치)와의 접촉 시, 스타일러스(2101)가 랜드마크(또는 기준 위치)와 접촉되어 있음을 나타내기 위해, 센서 유닛(2111) 상의 버튼(미도시)이 가압될 수 있다. 일 실시예에서, 적어도 3개의 랜드마크(또는 기준 위치)는 센서 유닛(2111)을 사용하여 어레이 (2105) 위치결정을 측정함으로써 결정된 위치와 접촉된다. 다른 실시예에서, 대퇴부의 정합이 필요한 대퇴골을 따르는 랜드마크가 기록된다.
대안적인 실시예에서, 도 20의 골반 정합 장치(2000)는 적어도 3개의 랜드마크(또는 기준 위치)와 동시에 접촉함으로써, 제1 (또는 기준 또는 골반) 센서 유닛(2111)에 대해 골반 상의 뼈 랜드마크(또는 기준 위치)를 결정하는데 사용될 수 있다.
전술한 바와 같이, 수술 전 다리 길이(예를 들어, 도 4a의 "405a") 및 오프셋(예를 들어, 도 4a의 "407a")으로부터 보철물이 이식된 후의 다리 길이(예를 들어, 도 4b의 "405b")와 오프셋(예를 들어, 도 4b의 "407b")으로의 변화를 측정하는 것이 중요할 수 있다. 도 22를 참조하면, 본 실시예에서는, 기준의 수술 전 다리 길이(예를 들어, "405a") 및 오프셋(예를 들어, "407a")은 (전술한 바와 같음) 핀 또는 골나사(2210b)를 사용하여 어레이(2205)를 대퇴골(2206)에 작동 가능하게 연결함으로써 측정될 수 있다. 제1 (또는 기준 또는 골반) 센서 유닛(2211)은 어레이(2205) 상의 마커를 추적함으로써, 골반(2204)에 대한 대퇴골(2206)의 수술 전 기준 위치결정을 결정하는데 사용될 수 있다.
이제, 본 실시예에 따른 비구의 리밍(reaming)이 도 23을 참조하여 설명된다. 리밍은 보철물 이식을 위해 비구를 준비하는 동안 행해진다. 예시적인 기구(2301)가 도시되며, 이 기구에, 제1 (또는 기준 또는 골반) 센서 유닛(2311)이 어레이(2305)의 각각의 마커의 위치를 추적하여 리밍 기구의 위치결정을 측정할 수 있도록 바람직하게는 적어도 3개의 마커를 구비한 예시적인 어레이(2305)가 결합된다. 어레이(2305)는 예를 들어, 전술한 것과 같은 커플링 옵션에 의해 기구(2301)에 결합될 수 있다.
본 명세서에서 설명된 고관절 수술 중에 중요하게 고려해야 할 다른 사항으로는 골반에 대한 비구 임플란트 구성요소의 배향이다. 도 24를 참조하면, 제1 (또는 기준 또는 골반) 센서 유닛(2411)에 대한 비구 임플란트(2415)의 상대 배향을 결정하는데 사용되는 일 예시적인 시스템이 개시된다. 제1 (또는 기준 또는 골반) 센서 유닛(2411)은 어레이(2405)를 광학적으로 추적할 수 있고, 어레이(2405)의 상대 위치를 결정하기에 충분한 정보를 측정할 수 있다. 어레이(2405)는 (예를 들어, 전술한 바와 같이) 공지된(또는 미리 결정된) 상대 위치에서 삽입 기구(2410)에 결합되고, 삽입 기구(2410)는 공지된 상대 위치에서 비구 임플란트(2415)에 결합된다. 비구컵은 예를 들어, 정합 나사를 통해 대응하는 외과용 삽입 기구에 결합될 수 있다. 결과적으로, 미리 결정된 골반(2404)의 기하학적 형상(예를 들어, 골반의 수술 전 스캔으로부터 측정됨)에 대한 공지된 관계로, (예를 들어, 전술한 바와 같이) 골반에 결합되는 제1 (또는 기준 또는 골반) 센서 유닛(2411)은 컴퓨팅 장치(도 24에는 미도시)가 골반의 기하학적 형상에 대한 비구 임플란트(2415)의 위치를 결정할 수 있도록 한다.
이제, 인공 관절이 조립(전형적으로는, 영구적인 구성요소를 이식하기 전에 적합한 크기설정을 결정하기 위해 시험용 구성요소로 행해짐)된 후의 다리 길이(예를 들어, 도 4b의 "405b") 및 오프셋(예를 들어, 도 4b의 "407b")을 측정하기 위해 본 실시예가 어떻게 사용될 수 있는지를 예시하는 도 25를 참조한다. 마커 어레이(2505)(마커 어레이(2505)는 전형적으로 도 22의 마커 어레이(2205)와 동일함)의 상대 위치결정을 측정하기 위해, 제1 (또는 기준 또는 골반) 센서 유닛(2511)이 사용될 수 있다. 인공 관절("2508" 및 "2515"의 조합)이 조립되면 다리 길이 및 오프셋에 있어서의 변화를 산출하기 위해, (수술 후) 마커 어레이(2505)의 상대 위치결정과, (수술 전) 마커 어레이(2205)의 상대 위치결정의 비교가 행해질 수 있다.
Ⅲ. 사용 방법
이제, 본 명세서에서 설명되는 방법 및 시스템에 대한 맥락을 이해하기 위해, 고관절 치환 수술에 대한 일 예시적인 방법이 개략적인 형태로 제시된 도 26과, 도 1 및 도 2를 참조한다. 블록(2602)에서, 환자는 수술 준비를 하게 된다(즉, 세신, 진정, 위치설정 등). 블록(2604)에서, 궁극적으로는 (몇몇 상이한 조직 층을 통과한 후) 고관절(100)이 드러나도록 하는 절제로부터 수술 절차는 개시된다. 블록(2606)에서, 환자의 고관절은 대퇴골두(108)가 더 이상 비구(102)에 위치하지 않도록 탈구된다. 고관절 전-치환 수술에 있어서, 블록(2608)에서 제시되는 바와 같이, 대퇴골두(108)는 제거(또는 절제)된다(블록(2606)에서 관절을 탈구하기 전에 대퇴골두(108)가 절제될 수 있음). 전형적으로, 수술 절차의 다음 태양은 비구 임플란트(220)의 삽입에 대해 비구(102)를 준비시키기 위해, 비구(102)를 리밍하는 단계(블록(2610))를 수반한다. 비구가 리밍되면, 블록(2612)에 따라 보철 비구 임플란트(220)가 이식될 수 있다. 또한, 대퇴골은 대퇴부 보철 구성요소(211)(대퇴부 볼 및 스템 포함)가 대퇴골(210) 내에 수용될 수 있도록 리밍(블록(2614))을 필요로 한다. 대퇴부 리밍은 대퇴부 브로치를 사용하여 행해질 수 있다. 대퇴골(210)의 리밍이 완료되면, 블록(2616)에 따라 시험용 대퇴부 보철이 대퇴골 내에 이식될 수 있다. 블록(2618)에서, 시험용 대퇴부 임플란트를 조립하기 위해 시험용 목 및 볼 구성요소가 사용된다. 블록(2620)에서, 인공 관절("208" 및 "211"의 조합)이 조립되고, 환자의 관절 운동 범위가 테스트될 수 있다. 시험용 구성요소가 잘 들어맞지 않으면, 원하는 만큼 들어맞을 때까지 (다른 크기의) 새로운 시험용 목 및 볼이 부착되어 테스트될 수 있다. 원하는 만큼 들어맞은 경우, 이에 따라 블록(2622)에서는, 실제 이식용 보철(시험용 보철과는 다름)의 크기가 정해진다. 블록(2624)에서, 시험용 대퇴부 구성요소는 실제 보철로 대체되고, 이식된다. 블록(2626)에서, 인공 관절이 조립되고, 상기 관절이 잘 들어맞는지를 다시 한번 확인한다. 최종적으로, 블록(2628)에서, 외과적 창상이 봉합된다.
이제, 고관절 치환 수술의 맥락에서 개시된 시스템이 어떻게 사용될 수 있는지에 대한 개요를 나타내고 있는 방법(2700)을 예시하는 도 27을 참조한다. 도 27의 방법(2700)은 전형적으로 도 26의 방법(2600)과 동시에 행해지며, 따라서 도 26을 계속 참조한다. 블록(2710) 이전의 임의의 시간에 행해질 수 있지만, 전형적으로는 수술 준비 단계에서 행해지게 될 블록(2702)에서, 수술을 받는 환자의 골반의 미리 결정된 기하학적 형상이 컴퓨팅 장치에 입력된다. 골반의 기하학적 형상은 환자마다 특이하기 때문에, 이 단계는 골반의 랜드마크 위치(또는 기준 지점)가 컴퓨팅 장치(예를 들어, 도 5의 "511")에 의해 실제 골반의 기하학적 형상과 연관되도록 행해진다. 임의의 적합한 의료용 영상화 절차를 통해 얻은 환자의 골반의 기하학적 형상을 이용할 수 없다면, 골반의 디폴트 템플릿이 사용될 수 있다. 환자가 준비되면(예를 들어, 블록(2602)), 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, 도 12의 "1211")은 골반(예를 들어, 도 12의 "1204")에 작동 가능하게 연결되며, 이러한 연결은 블록(2704 및 2706)에서, 예를 들어, 골반(예를 들어, "1204")에 견고하게 부착되는 핀 또는 골나사(예를 들어, "1210")에 제1 (또는 기준 또는 골반) 센서(예를 들어, "1211")를 연결함으로써 달성될 수 있다.
블록(2602)(환자 준비)에 이어서, 그리고 블록(2606)(고관절 탈구) 전에 행해지는 블록(2708)은 스타일러스와 제2 센서 유닛의 조합체(예를 들어, 도 12의 "1201"와 "1205", 또는 도 21의 "2101"과 "2105"), 또는 골반 정합 장치(예를 들어, "1100" 및 "2000")를 사용하여 적어도 3개의 골반 랜드마크(또는 기준 지점)에 접촉하는 단계, 및 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, "1211")에 대한 랜드마크(또는 기준 지점)의 위치를 측정하는 단계를 수반한다. 블록(2710)에서, 랜드마크 (또는 기준 지점)의 위치는, 골반(예를 들어, "1204")에 대한 골반 센서 유닛(예를 들어, "1211")의 상대 위치결정이 결정될 수 있도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")에 의해 단계(2702)의 디폴트 템플릿 기하학적 형상 또는 수술 전 영상화 데이터와 연관된다.
블록(2712 및 2714)에서, 센서 유닛 또는 마커 어레이(예를 들어, 도 16의 "1605" 또는 도 22의 "2205")는 예를 들어, 전술한 바와 같이 환자의 대퇴골(예를 들어, "1606")에 작동 가능하게 연결된다. 작동 가능한 연결은 대퇴골(예를 들어, "1606")에 체결되는 핀 또는 골나사(예를 들어, "1610b")를 통해 행해질 수 있다. 블록(2716)에서, 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, 도 16의 "1611" 또는 도 22의 "2211") 및 가능한 대퇴골 센서 유닛 또는 마커 어레이(예를 들어, "1605" 또는 "2205")는 관절이 여전히 온전한 상태인 동안에 원래의 대퇴골의 상대 위치결정이 결정되어 저장되도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신한다. 고관절 치환 수술에 있어 이 시점에서, 블록(2606)(둔부 탈구)이 행해질 수 있다.
전형적으로는 고관절 치환 수술의 블록(2610)(비구 리밍)과 동시에 행해지는 블록(2718)에서, 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, "1611" 또는 "2211") 및 가능한 리머 센서 유닛 또는 마커 어레이(예를 들어, 도 14의 "1405" 또는 도 23의 "2305")는 각각의 측정을 통해, 리밍 동안의 골반과 리밍 기구(예를 들어, 도 14의 "1401" 및 도 23의 "2301")의 상대 위치결정이 결정되고, 예를 들어 디스플레이(예를 들어, 도 5의 "514")를 통해 외과의에게 보여지도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신한다. 이러한 위치결정 데이터는 리밍 각도 및 리밍 깊이를 나타내도록 포맷 될 수 있다. 또한, 이러한 데이터는 데이터베이스(예를 들어, 도 5의 "516")에 저장될 수 있다.
고관절 치환 수술의 블록(2612)(비구 임플란트의 이식)과 함께 행해지는 블록(2720)에서, 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, "1511" 및 "2411") 및 가능한 삽입 기구 센서 유닛 또는 마커 어레이(예를 들어, 도 15의 "1505" 또는 도 24의 "2405")는 각각의 측정을 통해, 정렬 동안 골반(예를 들어, "1504" 및 "2404")과 비구 임플란트(예를 들어, 도 15의 "1515" 및 도 22의 "2215")의 상대 위치결정이 결정되고 예를 들어, 디스플레이(예를 들어, 도 5의 "514")를 통해 외과의에게 보여지도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신한다. 이러한 위치결정 데이터는 외전 각도 및 전경 각도(예를 들어, 각각 도 3a의 "332" 및 도 3c의 "333")을 나타내도록 포맷 될 수 있다. 또한, 이러한 데이터는 데이터베이스(예를 들어, 도 5의 "516")에 저장될 수 있다. 외과의가 이러한 위치결정에 만족하면, 비구 임플란트(예를 들어, 도 15의 "1515" 및 도 22의 "2215")가 이식될 수 있다(블록(2612)).
블록(2614, 2616, 2618 및 2620)은 고관절 전-치환 수술에 특화될 수 있다. 당업계의 기술자는 고관절 치환 수술 또는 다른 유형의 정형 외과적 수술에 있어서 대응하는 단계들이 일반적으로, 시술될 수술의 특성에 따라 전용될 수 있음을 인식할 것이다.
블록(2722)에서, 시험용 보철물과 관절이 잘 들어맞는지를 확인할 때(블록(2618 및 2620)), 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, 도 16의 "1611" 및 도 25의 "2511") 및 가능한 대퇴골 센서 유닛 또는 마커 어레이(예를 들어, "1605" 또는 "2505")는 시험용 대퇴골 위치결정에 있어서의 변화가 저장된 기준 대퇴골 위치 및 새로운 측정값에 기초하여 결정되도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신한다. 이러한 정보는 예를 들어, 디스플레이(예를 들어, 도 5의 "514")를 통해, 바람직하게는 다리 길이에 있어서의 변화(예를 들어, "405b" 빼기 "405a") 및 오프셋의 변화(예를 들어, "407b" 빼기 "407a")의 형태로 외과의에게 보여질 수 있게 된다. 외과의는 대퇴부 보철물의 크기를 정하기 위해 이러한 정보를 사용할 수 있다(단계(2622)). 또한, 이 정보는 데이터베이스(예를 들어, 도 5의 "516")에 저장될 수 있다.
이식을 위한 대퇴부 보철물이 선택되면, 블록(2624)에 따라 이들 보철물이 이식되고, 블록(2626)에 따라 인공 관절이 조립된다. 이때, 블록(2724)에서 제시된 바와 같이, 관절에 대한 대퇴골의 위치결정을 확인하는 것이 가능하다. 제1 (또는 기준 또는 골반) 센서 유닛(예를 들어, 도 16의 "1611" 및 도 25의 "2511") 및 가능한 대퇴골 센서 유닛 또는 마커 어레이(예를 들어, "1605" 또는 "2505")는 실제 대퇴골 위치결정에 있어서의 변화가 저장된 기준 대퇴골 위치 및/또는 시험용 대퇴골 측정값 및 새로운 측정값에 기초하여 결정될 수 있도록, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신한다. 이 정보는 예를 들어, 디스플레이(예를 들어, 도 5의 "514")를 통해, 바람직하게는 다리 길이에 있어서의 변화(예를 들어, "405b" 빼기 "405a") 및 오프셋의 변화(예를 들어, "407b" 빼기 "407a")의 형태로 외과의에게 보여질 수 있게 된다. 외과의는 관절 정렬의 결과가 만족스러운지 여부를 확인하기 위해 이 정보를 사용할 수 있다. 또한, 이 정보는 데이터베이스(예를 들어, 도 5의 "516")에 저장될 수 있다. 이때, 외과적 창상이 봉합될 수 있다(블록(2628)).
도 28a 및 도 28b를 참조하면, 뼈의 미리 결정된 기하학적 형상에 대한 제1 센서 유닛의 상대 위치를 결정하기 위한 방법(2800a, 2800b)이 개시되어 있다. 도 11 및 도 12도 참조할 것이다. 본 예시적인 실시예에 따르면, 뼈는 환자의 골반(예를 들어, "1104" 및 "1204")이다. 도 28a의 방법은 뼈의 뼈 랜드마크(또는 기준 지점)의 위치결정 정보를 얻기 위해, 예를 들어 제2 센서 유닛(예를 들어, "1205")을 갖는 스타일러스(예를 들어, "1201")가 사용되는 경우에 적용 가능하다.
이제, 특별히 도 28a 및 도 12를 참조한다. 블록(2802a)에서, 뼈(예를 들어, 골반(1204))의 미리 결정된 기하학적 형상이 컴퓨팅 장치(예를 들어, 도 5의 "511")에 입력된다. 기하학적 형상은 환자의 수술 전 스캔(예를 들어, x-레이, CT 스캔, 및 MRI)에 기초하여 측정값을 얻음으로써 미리 결정될 수 있고, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신하는 키보드 또는 마우스와 같은 입력 장치를 사용하여 입력될 수 있다. 환자의 수술 전 스캔(또는 뼈의 기하학적 형상이 미리 결정되거나 측정될 수 있는 다른 적합한 데이터)을 이용할 수 없는 경우에, 뼈의 디폴트 템플릿(예를 들어, 골반 템플릿)이 사용될 수 있다.
블록(2804a)에서, 제1 (또는 기준) 센서 유닛(1211)이 예를 들어, 전술한 바와 같이 뼈(1204)에 작동 가능하게 연결된다. 이러한 연결은 예를 들어, 공지된 배향으로 핀 또는 골나사(1210)를 뼈(1204)에 고정시키고, 기준 센서 유닛(1211)을 핀 또는 골나사(1210)에 부착시킴으로써 이루어질 수 있다.
블록(2806)에서, 제2 센서 유닛(1205)이 제1 기준 지점에 대해 미리 결정된 관계를 갖는 제1 센서 유닛 위치에 위치된다. 도 12에 예시된 실시예에서, 제2 센서 유닛(1205)이 공지된 위치에 부착되어 있는 스타일러스(1201)는 치골 결절(1208)(제1 기준 위치)과 접촉하는데 사용된다. 스타일러스(1201)의 단부와 제1 기준 위치 사이의 접촉을 유지하면서(그리고, 이에 따라 제1 센서 위치에 제2 센서 유닛(1205)을 유지하면서), 블록(2808)에 따라, 기준 센서 유닛(1211)에 대한 제2 센서 유닛(및 이에 따라 제1 기준 위치)의 상대 위치결정에 관한 제1 정보가 컴퓨팅 장치(예를 들어, 도 5의 "511")로 통신된다. 상기 정보는 제2 센서 유닛(1205) 또는 기준 센서 유닛(1211)에 의해 통신될 수 있다. 다른 예시적 기준 위치에는 ASIS 지점(1203), AIIS 지점(1217) 및 장골능(1206)을 따르는 지점, 또는 치골 결절의 부착 지점이 포함되지만, 이에 한정되지 않는다.
각각의 블록("2810"과 "2812", 및 "2814"와 "2816")에서는, 제2 및 제3 기준 위치에 대한 것이라는 점을 제외하고는, 블록("2806" 및 "2808")에서의 단계들과 유사한 단계들이 행해진다. 예를 들어, 제2 센서 유닛(1205)이 부착되어 있는 스타일러스(1201)가 각각 제2 및 제3 기준 위치와 접촉하기 위해 사용될 수 있다. 스타일러스가 제2 기준 위치와 접촉하고 있을 때, 제2 센서 유닛은 제2 기준 위치에 대해 미리 결정된 제2 관계를 갖는 제2 센서 위치에 있다. 유사하게, 스타일러스가 제3 기준 위치와 접촉하고 있을 때, 제2 센서 유닛은 제3 기준 위치에 대해 미리 결정된 제3 관계를 갖는 제3 센서 위치에 있다.
제2 센서 유닛이 제2 및 제3 센서 위치 각각에 있을 때, 기준 센서(1211)에 대한 제2 센서 유닛의 상대 위치결정에 관한(및 이에 따라 각각 제2 및 제3 기준 위치에 관한) 각각의 제2 및 제3 정보가 컴퓨팅 장치(예를 들어, 도 5의 "511")에 통신된다. 다시 한번, 제2 및 제3 정보가 제2 센서 유닛(1205) 또는 기준 센서 유닛(1211)에 의해 통신될 수 있다. 제2 및 제3 기준 위치의 추가적인 예에는 ASIS 지점(1203), AIIS 지점(1217), 및 장골능(1206)을 따르는 지점이 포함되지만, 이에 한정되지 않는다. 정합 정밀성을 개선하기 위해, 3개보다 많은 개수의 기준 위치를 사용하는 것이 바람직할 수 있다. 기준 위치의 선택에 대한 하나의 제약은 이들 위치가 별개의 비-동일선상 기준 위치이고, 이들이 뼈의 기하학적 형상을 미리 결정하기 위한 목적을 위해 인식 가능한 랜드마크여야 한다는 점이다.
블록(2818a)에서, 컴퓨팅 장치(예를 들어, 도 5의 "511")는 제1, 제2 및 제3 정보와 미리 결정된 제1, 제2, 및 제3 관계를 컴퓨팅 장치 내에 저장된 미리 결정된 기하학적 형상과 연관시킨다. 이러한 연관 관계는 다른 강성 본체(당업계의 기술자에게 명백한, 요구되는 센서 및 마커를 보유함)에 대한 뼈의 상대 위치가 강성 본체 상의 제1 센서 유닛(1211) 및 제2 센서 유닛을 사용하여 결정 및 모니터링될 수 있도록 한다.
이제, 특히 도 28b 및 도 11을 참조한다. 방법(2800b)은 바람직하게는, 방법(2800a)과 동일한 목적으로, 즉 뼈에 작동 가능하게 연결되는 기준 센서 유닛에 대한 뼈의 상대 위치를 결정하기 위해 행해진다. 그러나, 방법(2800b)은 정합 장치(예를 들어, 골반 정합 장치(1100 및 2000))가, 적어도 제1, 제2 및 제3 기준 위치에 대한 공지된 관계로 동시에 제2 센서 유닛을 위치결정하도록 사용된다는 점에서 방법(2800a)과는 상이하다.
블록(2802b)에서, 뼈(예를 들어, 골반(1204))의 미리 결정된 기하학적 형상이 컴퓨팅 장치(예를 들어, 도 5의 "511")에 입력된다. 기하학적 형상은 환자의 수술 전 스캔에 기초하여 측정될 수 있으며, 컴퓨팅 장치(예를 들어, 도 5의 "511")와 통신하는 키보드 또는 마우스와 같은 입력 장치를 사용하여 입력될 수 있다. 환자의 수술 전 스캔(또는 뼈의 기하학적 형상이 측정될 수 있는 다른 적합한 데이터)을 이용할 수 없는 경우, 뼈의 디폴트 템플릿(예를 들어, 골반 템플릿)이 사용될 수 있다.
블록(2804b)에서, 기준 센서 유닛(예를 들어, 도 12의 "1211")은 예를 들어, 전술한 바와 같이, 뼈(1104)에 작동 가능하게 연결된다. 이러한 연결은 예를 들어, 공지된 배향으로, 핀 또는 골나사(예를 들어, 도 12의 "1210")를 뼈(1104)에 고정시키고, 기준 센서 유닛(예를 들어, 도 12의 "1211")을 핀 또는 골나사(예를 들어, 도 12의 "1210")에 부착함으로써 달성될 수 있다.
블록(2805)에서, 제2 센서 유닛은 센서 유닛 위치에 위치된다. 센서 유닛 위치에서, 제2 센서 유닛은 뼈(1104) 상의 제1, 제2, 및 제3 기준 위치 각각에 대한 미리 결정된 제1, 제2, 및 제3 관계를 갖는다. 도 11에 예시된 예시적인 실시예에서, 제1 기준 위치는 제1 접촉 부재(1117)와 접촉하는 것으로 도시된 ASIS 지점(1103)이고; 제2 기준 위치는 제2 접촉 부재(1106)와 접촉하는 ASIS 지점(1103)이며; 그리고 제3 기준 지점(1115)은 장골능(1105)을 따르는 지점이다. 기준 위치에는 ASIS 지점(1103), AIIS 지점(예를 들어, 도 12의 "1217") 및 장골능(1105)을 따르는 감지 가능한 지점, 또는 치골 결절(1113)(하나만 도시됨)이 포함되지만, 이에 한정되지 않는다.
제2 센서 유닛을 적절하게 위치설정 하기 위해, 제1, 제2 및 제3 접촉 부재(1117, 1106, 1110) 각각이, 정합 장치(1100) 상의 제1, 제2, 및 제3 접촉 지점(1107, 1109, 1111) 각각을 통해 뼈(1104) 상의 제1, 제2, 및 제3 기준 위치(1103, 1103, 1115) 각각과 접촉하게 된다.
제2 센서 유닛(1130)이 적절하게 위치설정되면, 정보가mm 블록(2807)에 따라, 컴퓨팅 장치(예를 들어, 도 5의 "511")로 통신된다. 도 28a의 방법(2800a)과 유사하게, 정보는 기준 센서 유닛(예를 들어, 도 12의 "1211")에 대한 제2 센서의 상대 위치결정과 관련된다. 다시 한 번, 정보는 기준 센서 유닛(예를 들어, 도 12의 "1211") 또는 제2 센서 유닛(1130)에 의해 통신될 수 있다.
제2 센서 유닛(1130)과 3개의 접촉 지점(1107, 1109, 1111) 각각의 사이에서의 공지된 위치 관계에 의해, 기준 센서 유닛(예를 들어, 도 12의 "1211")에 대한 뼈(1104)의 상대 위치가 제2 센서 유닛(1130) 및/또는 기준 센서 유닛(예를 들어, 도 12의 "1211")과 컴퓨팅 장치(예를 들어, 도 5의 "511") 사이에서 통신되는 정보로부터 산출될 수 있다.
블록(2818b)에서, 센서 위치와, 제1, 제2, 및 제3 기준 위치 각각의 사이의 미리 결정된 제1, 제2, 및 제3 관계가 컴퓨팅 장치(예를 들어, 도 5의 "511")에 입력된다. 블록(2820a)에서와 같이 블록(2820b)에서, 컴퓨팅 장치(예를 들어, 도 5의 "511")는 제1, 제2, 및 제3 정보를 컴퓨팅 장치 내에 저장된 미리 결정된 기하학적 형상과 연관짓는다. 이러한 연관 관계는 뼈(1104)의 위치가 기준 센서 유닛(예를 들어, 도 12의 "1211")에 대해 결정될 수 있도록 한다.
이제, 강성 본체에 대한 뼈의 상대 위치결정을 결정하기 위한 방법(2900)이 도 29를 참조하여 설명된다. 뼈는 환자(1307)의 골반(1304)이고, 강성 본체는 환자의 대퇴골(1306)인 예시적인 실시예가 예시되어 있는 도 13을 참조할 것이다. 블록(2902)에서, 제1 (또는 기준 또는 골반) 센서 유닛(1311)은 예를 들어, 전술한 바와 같이 뼈(골반(1304))에 작동 가능하게 연결된다. 작동 가능한 연결은 당업계의 기술자에게 공지된 기술에 따라 핀 또는 골나사(1310a)를 통해 달성될 수 있다.
블록(2904)에서, 제2 센서 유닛(대퇴골 센서 유닛(1305))은 강성 본체(대퇴골(1306))에 작동 가능하게 연결된다. 작동 가능한 연결은 제1 (또는 기준 또는 골반) 센서 유닛(1311)과 골반(1304)의 작동 가능한 연결에 대해 설명된 것과 동일한 방식으로 달성될 수 있다.
블록(2906)에서, 신호는 제1 및 제2 센서 유닛 중 하나(또는 양자 모두)에 의해 발신되고, 블록(2908)에서, 신호는 제1 및 제2 센서 유닛 중 다른 하나(또는 양자 모두)에 의해 검지된다. 신호는 예를 들어, 센서 유닛 내의 IR 방출체(예를 들어, 도 7a, 도 7b 및 도 7c의 방출체(705, 715 및 725) 참조)에 의해 발신되는 IR 신호일 수 있다. 이러한 실시예에서, 검지 센서(제1 또는 제2 센서 유닛이든, 또는 양자 모두이든)는 IR 신호를 검지하도록 구성된다.
제1 및 제2 센서 유닛의 조합은 원하는 정보에 따라 선택될 수 있다. 예를 들어, 6-DOF의 상대 위치결정이 요구되는 경우, 비록, 추가적인 광학 센서가 시야 및 정밀성의 관점에서 유리할 수 있지만, 적어도 하나의 광학 센서 및 광학 센서에 대해 가시적인 적어도 3개의 마커 또는 방출체(바람직하게는, 서로 공지된 위치 관계에 있음)의 조합이면 충분할 수 있다.
위치결정 정보를 추론하기 위해 관성 센서(즉, 가속도계 및 자이로스코프)로부터의 측정값이 사용될 수 있다. 그러나, 관성 측정값으로부터 위치결정(각도적이든 병진 운동적이든)을 결정하는 것은 전형적으로는, 노이즈의 존재 시, 추론된 위치에 있어서의 드리프트(drift)를 야기하게 될 신호의 통합에 의존한다. 드리프트는 시간의 함수로서 증가한다. 컴퓨팅 장치에 의해 산출되고 표시되는 위치결정의 정밀성을 개선하기 위해, 제1 및 제2 센서 유닛이 관성 센서를 통합할 수 있음은 당업계의 기술자에 의해 인식될 것이다. 또한, 제1 및 제2 센서 유닛에 관성 센서를 통합하는 것은 (제1 및/또는 제2 센서 유닛 상의) 적어도 하나의 광학 센서와 방출체(들) 또는 마커(들) 사이의 가시선이, 제1 및 제2 센서 유닛의 상대 위치결정이 관성 측정값으로부터 추론될 수 있는 동안 일시적으로 차단되도록 할 수 있다.
블록(2910)에서, 신호(또는 신호들)로부터 도출된 정보 및 검지된 다른 가능한 정보(예를 들어, 가속도계 측정값, 자이로스코프 측정값 등)는 컴퓨팅 장치(예를 들어, 도 5의 "511")로 통신된다. 신호(또는 신호들)로부터 도출된 정보는 광학 센서와 마커 또는 방출체 사이의 위치 관계에 관련된다.
블록(2912)에서, 뼈(1304)와 강성 본체(1306) 사이의 상대 위치결정을 결정하기 위해, 상기 정보가 처리된다. 선택적으로, 처리된 정보는 예를 들어, 외과의를 위해 디스플레이(예를 들어, 도 5의 "514")에 표시될 수 있다.
IV
. 컴퓨터 실행
일 실시예에서, 본 발명의 각종 구성요소 간의 통신 및/또는 데이터 전송은 물리적으로 또는 무선으로 연결된 전기 장치로 이루어진 네트워크를 통해 달성된다. 이러한 장치 (예를 들어, 최종 사용자 장치 및/또는 서버)는 비제한적으로 하기를 포함할 수 있다: 데스크톱 컴퓨터, 랩탑 컴퓨터, 핸드헬드 형 기기 또는 PDA, 휴대전화, 셋톱 박스, 인터넷 가전, 인터넷 TV 시스템, 무선 단말기 또는 태블릿, 또는 이들과 등가의 시스템. 예시적인 네트워크로는 근거리 네트워크, 광역 네트워크, 조직 인트라넷, 인터넷, 또는 이들과 등가의 네트워크를 포함한다. 예시된 컴퓨터 및 네트워크의 기능 및 시스템 구성요소는 도 30과 함께 더 설명된다.
일 실시예에서, 본 발명은, 예를 들어 본원에 기재된 기능을 수행할 수 있는 하나 이상의 컴퓨터 시스템에 관한 것이다. 예를 들어, 도 30은 상기 제시한 방법을 실행하기 위해 이용되는 컴퓨터 시스템(3000)의 개략도이다. 컴퓨터 시스템(3000)은 프로세서(3004)와 같은 하나 이상의 프로세서를 포함한다. 프로세서(3004)는 통신 인프라스트럭쳐(3006) (예를 들어, 통신 버스, 크로스오버 바, 또는 네트워크)에 연결된다. 컴퓨터 시스템(3000)은 근거리 또는 원거리 디스플레이 유닛(3030) 상에서의 표시를 위해 통신 인프라스트럭쳐(3006)로부터 (또는 도시되지 않은 프레임 버퍼로부터) 그래픽, 텍스트, 및 기타 데이터를 전달하는 디스플레이 인터페이스(3002)를 포함할 수 있다.
컴퓨터 시스템(3000)은 또한 주기억장치(3008), 예컨대 랜덤 액세스 메모리 (RAM)를 포함할 수 있으며, 보조기억장치(3010)를 포함할 수도 있다. 보조기억장치(3010)는, 예를 들어 하드 디스크 드라이브(3012) 및/또는 플로피 디스크 드라이브, 자기 테이프 드라이브, 광학 디스크 드라이브, 플래시 메모리 장치 등을 나타내는 탈착식 저장 드라이브(3014)를 포함할 수 있다. 탈착식 저장 드라이브(3014)는 탈착식 저장 유닛(3018)으로부터 판독하고, 및/또는 탈착식 저장 유닛(3018)에 기록한다. 탈착식 저장 유닛(3018)은 플로피 디스크, 자기 테이프, 광학 디스크, 플래시 메모리 장치 등을 나타내고, 탈착식 저장 유닛(3018)은 탈착식 저장 드라이브(3014)에 의해 판독되고 기록된다. 이해될 것과 같이, 탈착식 저장 유닛(3018)은 컴퓨터 소프트웨어, 명령 및/또는 데이터를 저장하는 컴퓨터 이용가능 저장 매체를 포함한다.
다른 실시예에서, 보조기억장치(3010)는 컴퓨터 프로그램 또는 기타 명령을 컴퓨터 시스템(3000)으로 로딩시키는 다른 유사 장치를 포함할 수도 있다. 이러한 장치는, 예를 들어 탈착식 저장 유닛(3022) 및 인터페이스(3020)를 포함할 수 있다. 상기 장치의 예에는 프로그램 카트리지 및 카트리지 인터페이스 (예를 들어 비디오 게임 장치에서 발견됨), 탈착식 메모리 칩 (예를 들어 소거 및 프로그램가능 읽기용 기억장치 (EPROM) 또는 프로그램 가능 읽기용 기억장치 (PROM)) 및 부속 소켓, 및 기타 탈착식 저장 유닛(3022) 및 인터페이스(3020)가 포함될 수 있고, 상기 장치는 컴퓨터 소프트웨어, 명령 및/또는 데이터를 탈착식 저장 유닛(3022)으로부터 컴퓨터 시스템(3000)으로 전달시킬 수 있다.
컴퓨터 시스템(3000)은 또한 통신 인터페이스(3024)를 포함할 수도 있다. 통신 인터페이스(3024)는 컴퓨터 소프트웨어, 명령 및/또는 데이터가 컴퓨터 시스템(3000)과 외부 장치 사이에서 전달되도록 한다. 통신 인터페이스(3024)의 예에는 모뎀, 네트워크 인터페이스 (예를 들어 이더넷 카드(Ethernet card)), 통신 포트, 퍼스널 컴퓨터 메모리 카드 국제 협회 (PCMCIA) 슬롯 및 카드 등이 포함될 수 있다. 통신 인터페이스(3024)를 통해 전달된 소프트웨어 및 데이터는 전기, 전자기, 광학적일 수 있는 신호(3028)의 형태이거나, 또는 통신 인터페이스(3024)에 의해 수용될 수 있는 기타의 신호 형태일 수 있다. 이들 신호(3028)는 통신 경로(3026, 예를 들어 채널)를 통해 통신 인터페이스(3024)에 제공된다. 이러한 채널(3026)은 신호(3028)를 전달하고, 와이어 또는 케이블, 광 섬유, 전화선, 셀룰러 링크, 무선 주파수 (RF) 링크, 무선 통신 링크, 및 기타 통신 채널을 사용하여 실행될 수 있다.
본 명세서에서, 용어 "컴퓨터 판독 가능 저장 매체", "컴퓨터 프로그램 매체" 및 "컴퓨터 이용가능 매체"란 일반적으로 탈착식 저장 드라이브(3014), 탈착식 저장 유닛(3018, 3022), 통신 인터페이스(3024)를 통해 전송된 데이터, 및/또는 하드 디스크 드라이브(3012)에 설치된 하드 디스크와 같은 매체를 지칭하기 위해 사용된다. 이들 컴퓨터 프로그램 제품은 컴퓨터 소프트웨어, 명령, 및/또는 데이터를 컴퓨터 시스템(3000)에 제공한다. 이들 컴퓨터 프로그램 제품은 또한 컴퓨터 프로그램 제품/소프트웨어로부터의 명령에 따라, 범용 컴퓨터를 특정 기능을 수행하도록 프로그램화된 특수 목적 컴퓨터로 변환시키는 역할을 한다. 본 발명의 실시예는 그러한 컴퓨터 프로그램 제품에 관한 것이다.
컴퓨터 프로그램 (컴퓨터 제어 논리로도 지칭됨)은 주기억장치(3008) 및/또는 보조기억장치(3010)에 저장된다. 컴퓨터 프로그램은 또한 통신 인터페이스(3024)를 통해 수용될 수도 있다. 컴퓨터 프로그램은, 실행되는 경우, 본원에 논의된 바와 같이, 컴퓨터 시스템(3000)이 본 발명의 특성을 수행하도록 할 수 있다. 특히, 컴퓨터 프로그램은, 실행되는 경우, 프로세서(3004)가 본 발명의 방법의 특성을 수행하도록 할 수 있다. 따라서, 상기 컴퓨터 프로그램은 컴퓨터 시스템(3000)의 제어기를 나타낸다. 따라서, 적절한 경우, 프로세서(3004), 관련 구성요소, 및 등가의 시스템 및 서브-시스템은 선택된 작업 및 기능을 수행하기 "위한 수단"의 역할을 한다. 상기 선택된 작업 및 기능을 수행하기 "위한 수단"은 또한 범용 컴퓨터를 상기 선택된 작업 및 기능을 수행하도록 프로그램화된 특수 목적 컴퓨터로 변환시키는 역할을 한다.
소프트웨어를 이용하여 본 발명을 실행하는 일 실시예에서, 소프트웨어는 컴퓨터 프로그램 제품에 저장될 수 있고, 탈착식 저장 드라이브(3014), 인터페이스(3020), 하드 드라이브(3012), 통신 인터페이스(3024), 또는 그의 등가물을 이용하여 컴퓨터 시스템(3000)으로 로딩될 수 있다. 제어 논리 (소프트웨어)는, 프로세서(3004)에 의해 실행되는 경우, 프로세서(3004)가 본원에 기재된 기능 및 방법을 수행하도록 유도한다.
또 다른 실시예에서, 본 방법은, 예를 들어 응용 주문형 집적 회로 (ASIC)와 같은 하드웨어 구성요소를 이용하여 주로 하드웨어에서 실행된다. 관련 업계(들)의 기술자에게는 본원에 기재된 기능 및 방법을 수행하기 위해 하드웨어 상태 기계(state machine)를 실행시키는 것이 자명할 것이다. 또 다른 실시예에서, 본 방법은 하드웨어 및 소프트웨어 둘 다의 조합을 이용하여 실행된다.
본원에 기재된 임의의 시스템 및 방법을 포함하는, 본 발명의 실시예는 또한 기계 판독 가능 매체 상에 저장된 명령으로서 실행될 수도 있으며, 이는 하나 이상의 프로세서에 의해 판독되고 실행될 수 있다. 기계 판독 가능 매체는 기계 (예를 들어, 컴퓨팅 장치)에 의해 판독 가능한 형태로 정보를 보관하거나 전송하기 위한 임의의 메커니즘을 포함할 수 있다. 예를 들어, 기계 판독 가능 매체는 판독 전용 메모리 (ROM); 랜덤 액세스 메모리 (RAM); 자기 디스크 저장 매체; 광학 저장 매체; 플래시 메모리 장치; 전기, 광학, 음향 또는 다른 전파 신호의 형태 (예를 들어, 반송파, 적외선 신호, 디지털 신호 등) 등을 포함할 수 있다. 또한, 특정 작동을 수행하는 것으로서 펌웨어, 소프트웨어, 루틴(routine), 명령이 본원에 기재될 수 있다. 그러나, 상기 기재는 단지 편의를 위한 것이며 사실상 상기 작동이 컴퓨팅 장치, 프로세서, 제어기, 또는 펌웨어, 소프트웨어, 루틴, 명령 등을 실행시키는 기타 장치로부터 유도된다는 것을 이해해야 한다.
V. 추가의 실시예.
일 실시예에서, (1) 환자의 골반에 결합되도록 구성된 골반 센서 유닛과, (2) 정합 센서 유닛과, (3) 비구 삽입 기구에 결합되도록 구성된 삽입 기구 센서 유닛과, (4) 환자의 대퇴골에 결합되도록 구성된 대퇴골 센서 유닛을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템이 제공된다. 상기 시스템은 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 더 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (a) 골반 센서 유닛과 정합 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점에 기반하고, (b) 골반 센서 유닛과 대퇴골 센서 유닛 간의 초기 위치 관계를 측정하고 (즉, 원래의 고관절이 아직 온전한 상태인 동안), (c) 골반 센서 유닛과 삽입 기구 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하고, (d) 골반에 대한 비구 삽입 기구의 배향에 기초하여 외전 각도 및 전경 각도를 산출하고, (e) 이식 시술 중에 외전 각도 및 전경 각도를 전달하는 실시간 표시를 제공하고, (f) 골반 센서 유닛과 대퇴골 센서 유닛 간의 정복 후 위치 관계를 측정하고 (즉, 인공보철물 구성요소를 이용한 시도 또는 최종 축소 동안), (g) (대퇴골 센서와 골반 센서 간의) 초기 위치 관계, (대퇴골 센서와 골반 센서 간의) 정복 후 위치 관계, 그리고 골반 센서 유닛과 환자의 골반 간의 위치 관계에 기초하여 다리 위치 변화를 산출하고, (h) 다리 위치 변화의 표시를 제공하게 한다. 초기 위치 관계는 초기 다리의 병진 측정을 포함할 수 있다. 초기 위치 관계는 초기 다리의 배향 측정을 포함할 수 있다. 다리 위치의 변화는 초기 위치 관계와 정복 후 위치 관계 간의 비교에 기초하여 산출될 수 있다. 다리 위치 변화는 또한 골반 센서 유닛과 대퇴골 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출될 수 있다. 다리 위치 변화는 또한 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함할 수도 있다.
컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함할 수 있으며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (i) 골반 센서 유닛과 대퇴골 센서 유닛 간의 위치 관계에 기초하여, 다리 위치결정 과정 중에 대퇴골 배향을 추적하고, (j) 다리 위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하고/거나, (k) 환자의 대퇴골의 회전 중심을 산출하게 한다. 회전 중심은 골반 센서 유닛과 정합 센서 유닛 간의 비구 표면 측정에 기초하여 산출할 수 있다. 회전 중심은 골반 센서 유닛과 대퇴골 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출할 수 있다.
또 다른 실시예에서, 고관절 치환 수술을 시행하기 위한 시스템이 제공되며, 상기 시스템은 (1) 환자의 골반에 결합되도록 구성된 골반 센서 유닛과, (2) 기준 센서 유닛과, (3) 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (a) 골반 센서 유닛과 기준 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점을 포함하고, (b) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하며, 기준 센서 유닛은 이식 시술 중에 비구 삽입 기구에 결합되고, (c) 비구 삽입 기구의 배향에 기초하여 임플란트 파라미터들을 산출하고 (임플란트 파라미터는, 예를 들어 컵 위치, 컵 위치의 변화, 컵 배향, 또는 위치 관계에 기초한 임의의 다른 정보임), (d) 이식 시술 중에 이식 파라미터들의 실시간 표시를 제공하게 한다.
컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함할 수 있으며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (e) 골반 센서 유닛과 환자의 대퇴골에 결합된 기준 센서 유닛 간의 초기 위치 관계 측정에 기초하여 초기 다리 위치를 산출하고, (f) 골반 센서 유닛과 기준 센서 유닛 간의 정복 후 위치 관계에 기초하여 정복 후 다리 위치를 측정하고, (g) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고, (h) 다리 위치 변화의 표시를 제공하고, (i) 환자의 대퇴골의 회전 중심을 산출하고, (j) 기준 센서 유닛이 환자의 대퇴골에 결합되었을 때 기준 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 대퇴골 배향을 추적하고/거나, (k) 다리 위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하게 한다.
초기 다리 위치는 초기 다리 길이 측정에 부분적으로 기초하여 산출될 수 있다. 초기 다리 위치는 초기 다리 배향 측정에 부분적으로 기초하여 산출될 수 있다. 초기 다리 위치는 기준 센서 유닛이 환자의 대퇴골에 결합되었을 때 기준 센서 유닛과 골반 센서 유닛 간의 위치 관계에 부분적으로 기초하여 산출될 수 있다. 별법의 실시예에서, 다리 위치 변화는 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합된다. 다리 위치 변화는 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함할 수 있다.
회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 비구 표면 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 비구 표면을 따라 3개 이상의 지점과 접촉한다. 회전 중심은 또한 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 대퇴골 관절 측정 동안 환자의 대퇴골에 결합된다.
또 다른 실시예에서, 고관절 치환 수술을 시행하기 위한 시스템이 제공되며, 상기 시스템은 (1) 환자의 골반에 결합되도록 구성된 골반 센서 유닛과, (2) 기준 센서 유닛과, (3) 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (a) 골반 센서 유닛과 기준 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점을 포함하고, (b) 골반 센서 유닛과 (환자의 대퇴골에 결합된) 기준 센서 유닛 간의 초기 위치 관계 측정에 기초하여 초기 다리 위치를 산출하고, (c) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여, 다리 위치결정 과정 중에 대퇴골 배향을 추적하고, (d) 다리 위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하고, (e) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여 정복 후 다리 위치를 측정하고, (f) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고, (g) 다리 위치 변화의 표시를 제공하게 한다.
컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함할 수 있으며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금 환자의 대퇴골의 회전 중심을 산출하게 한다. 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 비구 표면 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 비구 표면을 따라 3개 이상의 지점과 접촉한다. 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합된다.
다리 위치 변화는 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출될 수 있으며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합된다. 다리 위치 변화는 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함한다.
또 다른 실시예에서, 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는, 고관절 치환 수술을 시행하기 위한 컴퓨터 판독 가능 저장 매체가 제공되며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (a) 골반 센서 유닛이 환자의 골반 상의 제1 지점에 결합되었을 때 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하고, (b) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 초기 다리 위치를 산출하고, (c) 비구 삽입 기구에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하고, (d) 비구 삽입 기구의 배향에 기초하여 이식 파라미터들을 산출하고, (e) 이식 시술 중에 이식 파라미터들을 전달하는 실시간 표시를 제공하고, (f) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 환자의 대퇴골을 추적하고, (g) 다리 위치결정 과정 중에 환자의 대퇴골의 배향을 전달하는 실시간 표시를 제공하고, (h) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 정복 후 다리 위치를 측정하고, (i) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고, (j) 다리 위치 변화의 표시를 제공하게 한다. 이식 파라미터들은 외전 각도 및 전경 각도를 포함한다. 별법의 실시예에서, 컴퓨터 판독 가능 저장 매체는 상기 열거된 기능 중 단지 하나 또는 이를 초과하여 수행하거나, 또는 상기 열거된 기능들을 다양한 순서로, 또는 동시에 또는 순차적인 단계로 수행한다.
또 다른 실시예에서, 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는, 고관절 치환 수술을 시행하기 위한 컴퓨터 판독 가능 저장 매체가 제공되며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (a) 골반 센서 유닛이 환자의 골반의 제1 지점에 결합되었을 때 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하고, (b) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 초기 다리 위치를 산출하고, (c) 비구 삽입 기구에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하고, (d) 비구 삽입 기구의 배향에 기초하여 임플란트 파라미터들을 산출하고, (e) 이식 시술 중에 임플란트 파라미터들을 전달하는 실시간 표시를 제공하고, (f) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 환자의 대퇴골을 추적하고, (g) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 정복 후 다리 위치를 측정하고, (h) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고, (i) 다리 위치 변화의 표시를 제공하게 한다. 임플란트 파라미터들은 외전 각도 및 전경 각도를 포함할 수 있다. 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함할 수 있으며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금, (j) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 환자의 대퇴골의 배향을 추적하고, (k) 다리 위치결정 과정 중에 환자의 대퇴골의 배향을 전달하는 실시간 표시를 제공하게 한다.
결론
본 발명의 상기 기재는 예시 및 설명을 목적으로 제시되었다. 본 발명을 개시된 정확한 형태로 제한하거나 본 발명의 모든 것을 철저히 다루고자 한 것은 아니다. 상기 교시의 관점에서 다른 변형 및 개질이 가능할 수 있다. 본 발명의 원리 및 그의 실질적인 응용을 최대한 설명하기 위해, 또한 이에 의하여 당업자가 의도된 특정 용도에 적합화된 각종 실시예 및 각종 개질로 본 발명을 최대한 이용할 수 있도록 하기 위해, 본 발명의 실시예가 선택되고 기재되었다. 첨부된 특허청구 범위는 등가의 구조, 구성요소, 방법, 및 수단을 포함하는 본 발명의 다른 별법의 실시예를 포함하는 것으로 해석하고자 한다.
따라서, 본 발명은 기재된 특정 실시예로 제한되는 것은 아니며, 이에 따라 변화될 수 있다는 것이 이해되어야 한다. 또한, 본원에서 사용된 용어는 단지 특정 실시예를 기재하기 위한 것이지 본 발명을 제한하고자 하는 것이 아님을 이해해야 한다.
본 개시내용을 읽고 나서, 당업계의 기술자에게는 본원에 기재되고 예시된 각각의 개별적인 실시예가 본 발명의 범주 또는 취지를 벗어나지 않으면서 임의의 다른 각종 실시예의 특징과 쉽게 분리되거나 조합될 수 있는 개별적인 구성요소 및 특징을 갖는다는 것이 명백해질 것이다. 어떠한 인용된 방법도 인용된 사건의 순서대로 수행될 수 있거나, 또는 논리적으로 가능한 임의의 다른 순서대로 수행될 수 있다.
요약서 및 초록이 아닌 발명의 상세한 기재 영역은 청구항을 해석하기 위해 사용된 것임을 이해해야 한다. 요약서 및 초록 영역은 하나 또는 이를 초과하여 기재할 수 있으나, 본 발명자(들)에 의해 의도된 본 발명의 모든 예시적 실시예를 기재하지는 않으므로, 어떤 식으로든 본 발명 및 첨부된 특허청구범위를 제한하고자 하는 것은 아니다.
Claims (30)
- 고관절 치환 수술을 시행하기 위한 시스템이며,
환자의 골반에 결합되도록 구성된 골반 센서 유닛과,
정합 센서 유닛과,
비구 삽입 기구에 결합되도록 구성된 삽입 기구 센서 유닛과,
환자의 대퇴골에 결합되도록 구성된 대퇴골 센서 유닛과,
적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(a) 골반 센서 유닛과 정합 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점에 기반하고,
(b) 골반 센서 유닛과 대퇴골 센서 유닛 간의 초기 위치 관계를 측정하고,
(c) 골반 센서 유닛과 삽입 기구 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하고,
(d) 비구 삽입 기구의 배향에 기초하여 외전 각도 및 전경 각도를 산출하고,
(e) 이식 시술 중에 외전 각도 및 전경 각도를 전달하는 실시간 표시를 제공하고,
(f) 골반 센서 유닛과 대퇴골 센서 유닛 간의 정복 후 위치 관계를 측정하고,
(g) 초기 위치 관계, 정복 후 위치 관계, 그리고 골반 센서 유닛과 환자의 골반 간의 위치 관계에 기초하여 다리 위치 변화를 산출하고,
(h) 다리 위치 변화의 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 제1항에 있어서, 초기 위치 관계는 초기 다리의 병진 운동 측정을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제1항에 있어서, 초기 위치 관계는 초기 다리의 배향 측정을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제1항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
골반 센서 유닛과 대퇴골 센서 유닛 간의 위치 관계에 기초하여, 다리 위치결정 과정 중에 대퇴골 배향을 추적하고,
다리 위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 제1항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금 환자의 대퇴골의 회전 중심을 산출하게 하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제5항에 있어서, 회전 중심은 골반 센서 유닛과 정합 센서 유닛 간의 비구 표면 측정에 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제5항에 있어서, 회전 중심은 골반 센서 유닛과 대퇴골 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제1항에 있어서, 다리 위치 변화는 초기 위치 관계와 정복 후 위치 관계 간의 비교에 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제8항에 있어서, 다리 위치 변화는 골반 센서 유닛과 대퇴골 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제1항에 있어서, 다리 위치 변화는 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 고관절 치환 수술을 시행하기 위한 시스템이며,
환자의 골반에 결합되도록 구성된 골반 센서 유닛과,
기준 센서 유닛과,
적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(a) 골반 센서 유닛과 기준 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점을 포함하고,
(b) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하며, 기준 센서 유닛은 이식 시술 중에 비구 삽입 기구에 결합되고,
(c) 비구 삽입 기구의 배향에 기초하여 임플란트 파라미터들을 산출하고,
(d) 이식 시술 중에 임플란트 파라미터들의 실시간 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 제11항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(e) 골반 센서 유닛과 환자의 대퇴골에 결합된 기준 센서 유닛 간의 초기 위치 관계 측정에 기초하여 초기 다리 위치를 산출하고,
(f) 골반 센서 유닛과 기준 센서 유닛 간의 정복 후 위치 관계에 기초하여 정복 후 다리 위치를 측정하고,
(g) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고,
(h) 다리 위치 변화의 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 제12항에 있어서, 초기 다리 위치는 초기 다리 길이 측정에 부분적으로 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제12항에 있어서, 초기 다리 위치는 초기 다리 배향 측정에 부분적으로 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제12항에 있어서, 초기 다리 위치는 기준 센서 유닛이 환자의 대퇴골에 결합되었을 때 기준 센서 유닛과 골반 센서 유닛 간의 위치 관계에 부분적으로 기초하여 산출되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제12항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금 환자의 대퇴골의 회전 중심을 산출하게 하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제16항에 있어서, 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 비구 표면 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 비구 표면을 따라 3개 이상의 지점과 접촉하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제16항에 있어서, 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제16항에 있어서, 다리 위치 변화는 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제12항에 있어서, 다리 위치 변화는 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제12항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
기준 센서 유닛이 환자의 대퇴골에 결합되었을 때 기준 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 대퇴골 배향을 추적하고,
위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 고관절 치환 수술을 시행하기 위한 시스템이며,
환자의 골반에 결합되도록 구성된 골반 센서 유닛과,
기준 센서 유닛과,
적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는 컴퓨터 판독 가능 저장 매체를 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(a) 골반 센서 유닛과 기준 센서 유닛 간의 정합 측정에 기초하여 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하며, 정합 측정은 적어도 3개의 기준점을 포함하고,
(b) 기준 센서 유닛이 환자의 대퇴골에 결합되었을 때 기준 센서 유닛과 골반 센서 유닛 간의 초기 위치 관계 측정에 기초하여 초기 다리 위치를 산출하고,
(c) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 대퇴골 배향을 추적하고,
(d) 다리 위치결정 과정 중에 대퇴골 배향을 전달하는 실시간 표시를 제공하고,
(e) 골반 센서 유닛과 기준 센서 유닛 간의 위치 관계에 기초하여 정복 후 다리 위치를 측정하고,
(f) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고,
(g) 다리 위치 변화의 표시를 제공하게 하는, 고관절 치환 수술을 시행하기 위한 시스템. - 제22항에 있어서, 컴퓨터 판독 가능 저장 매체는 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며, 상기 명령들은 그 실행 시 프로세싱 장치로 하여금 환자의 대퇴골의 회전 중심을 산출하게 하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제23항에 있어서, 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 비구 표면 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 비구 표면을 따라 3개 이상의 지점과 접촉하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제23항에 있어서, 회전 중심은 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제23항에 있어서, 다리 위치 변화는 골반 센서 유닛과 기준 센서 유닛 간의 대퇴골 관절 측정에 기초하여 산출되며, 상기 기준 센서 유닛은 대퇴골 관절 측정 중에 환자의 대퇴골에 결합되는, 고관절 치환 수술을 시행하기 위한 시스템.
- 제22항에 있어서, 다리 위치 변화는 다리 길이 측정, 오프셋 측정, 및/또는 전방-후방 위치 측정을 포함하는, 고관절 치환 수술을 시행하기 위한 시스템.
- 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 갖는, 고관절 치환 수술을 시행하기 위한 컴퓨터 판독 가능 저장 매체이며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(a) 골반 센서 유닛이 환자의 골반 상의 제1 지점에 결합되었을 때 골반 센서 유닛과 환자의 골반 간의 위치 관계를 산출하고,
(b) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 초기 다리 위치를 산출하고,
(c) 비구 삽입 기구에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 이식 시술 중에 비구 삽입 기구의 배향을 추적하고,
(d) 비구 삽입 기구의 배향에 기초하여 임플란트 파라미터들을 산출하고,
(e) 이식 시술 중에 임플란트 파라미터들을 전달하는 실시간 표시를 제공하고,
(f) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 환자의 대퇴골을 추적하고,
(g) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 정복 후 다리 위치를 측정하고,
(h) 초기 다리 위치와 정복 후 다리 위치 간의 다리 위치 변화를 산출하고,
(i) 다리 위치 변화의 표시를 제공하게 하는, 컴퓨터 판독 가능 저장 매체. - 제28항에 있어서, 임플란트 파라미터들은 외전 각도 및 전경 각도를 포함하는, 컴퓨터 판독 가능 저장 매체.
- 제28항에 있어서, 적어도 하나의 프로세싱 장치에 의해 실행 가능한 명령들을 더 포함하며,
상기 명령들은 그 실행 시 프로세싱 장치로 하여금,
(j) 환자의 대퇴골에 결합된 센서 유닛과 골반 센서 유닛 간의 위치 관계에 기초하여 다리 위치결정 과정 중에 환자의 대퇴골이 배향을 추적하고,
(k) 다리 위치결정 과정 중에 환자의 대퇴골의 배향을 전달하는 실시간 표시를 제공하게 하는, 컴퓨터 판독 가능 저장 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201061424447P | 2010-12-17 | 2010-12-17 | |
| US61/424,447 | 2010-12-17 | ||
| PCT/IB2011/003246 WO2012080840A1 (en) | 2010-12-17 | 2011-12-16 | Method and system for aligning a prosthesis during surgery |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130129246A true KR20130129246A (ko) | 2013-11-27 |
Family
ID=46235299
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR20137018638A KR20130129246A (ko) | 2010-12-17 | 2011-12-16 | 수술 중에 보철물을 정렬하기 위한 방법 및 시스템 |
Country Status (8)
| Country | Link |
|---|---|
| US (6) | US9138319B2 (ko) |
| EP (1) | EP2651344A4 (ko) |
| JP (1) | JP2014508549A (ko) |
| KR (1) | KR20130129246A (ko) |
| CN (1) | CN103402450A (ko) |
| AU (2) | AU2011342900A1 (ko) |
| CA (1) | CA2821670A1 (ko) |
| WO (1) | WO2012080840A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190044324A (ko) * | 2017-10-20 | 2019-04-30 | 울산대학교 산학협력단 | 구조물의 삽입 각도를 가이드 하는 방법, 장치 및 컴퓨터 프로그램 |
Families Citing this family (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8083745B2 (en) * | 2001-05-25 | 2011-12-27 | Conformis, Inc. | Surgical tools for arthroplasty |
| US9610092B2 (en) * | 2011-08-29 | 2017-04-04 | Microsoft Orthopedics Holdings Inc. | Precision hip replacement method |
| WO2004112610A2 (en) | 2003-06-09 | 2004-12-29 | Vitruvian Orthopaedics, Llc | Surgical orientation device and method |
| US7559931B2 (en) | 2003-06-09 | 2009-07-14 | OrthAlign, Inc. | Surgical orientation system and method |
| US8814868B2 (en) | 2007-02-28 | 2014-08-26 | Smith & Nephew, Inc. | Instrumented orthopaedic implant for identifying a landmark |
| US8784425B2 (en) | 2007-02-28 | 2014-07-22 | Smith & Nephew, Inc. | Systems and methods for identifying landmarks on orthopedic implants |
| US9220514B2 (en) | 2008-02-28 | 2015-12-29 | Smith & Nephew, Inc. | System and method for identifying a landmark |
| EP2344078B1 (en) | 2008-07-24 | 2018-04-18 | OrthAlign, Inc. | Systems for joint replacement |
| ES2750264T3 (es) | 2008-09-10 | 2020-03-25 | Orthalign Inc | Sistemas de cirugía de la cadera |
| WO2010063117A1 (en) | 2008-12-02 | 2010-06-10 | Andre Novomir Hladio | Method and system for aligning a prosthesis during surgery using active sensors |
| US8945147B2 (en) | 2009-04-27 | 2015-02-03 | Smith & Nephew, Inc. | System and method for identifying a landmark |
| US9031637B2 (en) | 2009-04-27 | 2015-05-12 | Smith & Nephew, Inc. | Targeting an orthopaedic implant landmark |
| US8118815B2 (en) | 2009-07-24 | 2012-02-21 | OrthAlign, Inc. | Systems and methods for joint replacement |
| US10869771B2 (en) | 2009-07-24 | 2020-12-22 | OrthAlign, Inc. | Systems and methods for joint replacement |
| WO2012082164A1 (en) | 2010-01-21 | 2012-06-21 | Orthallgn, Inc. | Systems and methods for joint replacement |
| US8926530B2 (en) | 2011-09-23 | 2015-01-06 | Orthosensor Inc | Orthopedic insert measuring system for having a sterilized cavity |
| BR112012030791A2 (pt) | 2010-06-03 | 2016-11-01 | Smith & Nephew Inc | implantes ortopédicos |
| CA2821670A1 (en) | 2010-12-17 | 2012-06-21 | Avenir Medical Inc. | Method and system for aligning a prosthesis during surgery |
| US8890511B2 (en) | 2011-01-25 | 2014-11-18 | Smith & Nephew, Inc. | Targeting operation sites |
| CA2825578A1 (en) * | 2011-02-08 | 2012-08-16 | The General Hospital Corporation | Patient positioning systems and methods |
| BR112013028627A2 (pt) | 2011-05-06 | 2017-01-24 | Smith & Nephew Inc | limites-alvo de dispositivos ortopédicos |
| CN103732165A (zh) | 2011-06-16 | 2014-04-16 | 史密夫和内修有限公司 | 使用基准的手术对准 |
| WO2013021357A1 (en) * | 2011-08-08 | 2013-02-14 | Ecole Polytechnique Federale De Lausanne (Epfl) | In-vivo condition monitoring of metallic implants by electrochemical techniques |
| AU2012315809B2 (en) | 2011-09-29 | 2017-06-08 | Arthromeda, Inc. | System and method for precise prosthesis positioning in hip arthroplasty |
| WO2013053398A1 (en) * | 2011-10-13 | 2013-04-18 | Brainlab | Medical tracking system comprising two or more communicating sensor devices |
| DE102012100953B4 (de) * | 2012-02-06 | 2020-01-09 | A.Tron3D Gmbh | Vorrichtung zum Erfassen der dreidimensionalen Geometrie von Objekten und Verfahren zum Betreiben derselben |
| US9539112B2 (en) * | 2012-03-28 | 2017-01-10 | Robert L. Thornberry | Computer-guided system for orienting a prosthetic acetabular cup in the acetabulum during total hip replacement surgery |
| US9314188B2 (en) | 2012-04-12 | 2016-04-19 | Intellijoint Surgical Inc. | Computer-assisted joint replacement surgery and navigation systems |
| AU2013262624B2 (en) | 2012-05-18 | 2018-03-01 | OrthAlign, Inc. | Devices and methods for knee arthroplasty |
| US9987092B2 (en) | 2012-06-20 | 2018-06-05 | Intellijoint Surgical Inc. | Computer-assisted joint replacement surgery and patient-specific jig systems |
| EP2877115A4 (en) * | 2012-07-24 | 2016-05-11 | Orthosoft Inc | SPECIFIC INSTRUMENT FOR A PATIENT WITH MICROELECTROMECHANICAL SYSTEM FOR USE IN SURGERY |
| CA2866192C (en) * | 2012-07-30 | 2021-02-23 | Orthosoft Inc. | Pelvic digitizer device with inertial sensor unit and method |
| WO2014019087A1 (en) * | 2012-07-30 | 2014-02-06 | Orthosoft Inc. | Method and system for creating frame of reference for cas with inertial sensors |
| US9649160B2 (en) * | 2012-08-14 | 2017-05-16 | OrthAlign, Inc. | Hip replacement navigation system and method |
| US9008757B2 (en) | 2012-09-26 | 2015-04-14 | Stryker Corporation | Navigation system including optical and non-optical sensors |
| IN2015DN03916A (ko) * | 2012-10-26 | 2015-10-02 | Inline Orthopaedics Pty Ltd | |
| EP3998048A1 (en) | 2012-11-09 | 2022-05-18 | Blue Belt Technologies, Inc. | Systems for navigation and control of an implant positioning device |
| US9237885B2 (en) | 2012-11-09 | 2016-01-19 | Orthosensor Inc. | Muscular-skeletal tracking system and method |
| US20140135773A1 (en) * | 2012-11-09 | 2014-05-15 | Orthosensor Inc | Prosthetic hip installation system |
| US9192445B2 (en) * | 2012-12-13 | 2015-11-24 | Mako Surgical Corp. | Registration and navigation using a three-dimensional tracking sensor |
| US9585768B2 (en) * | 2013-03-15 | 2017-03-07 | DePuy Synthes Products, Inc. | Acetabular cup prosthesis alignment system and method |
| WO2014145540A2 (en) | 2013-03-15 | 2014-09-18 | Arthromeda, Inc. | Systems and methods for providing alignment in total knee arthroplasty |
| US9247998B2 (en) | 2013-03-15 | 2016-02-02 | Intellijoint Surgical Inc. | System and method for intra-operative leg position measurement |
| US11793424B2 (en) | 2013-03-18 | 2023-10-24 | Orthosensor, Inc. | Kinetic assessment and alignment of the muscular-skeletal system and method therefor |
| US9339212B2 (en) | 2013-03-18 | 2016-05-17 | Orthosensor Inc | Bone cutting system for alignment relative to a mechanical axis |
| EP2981943B1 (en) | 2013-04-03 | 2017-03-15 | Brainlab AG | Method and device for determining the orientation of a co-ordinate system of an anatomical object in a global co-ordinate system |
| US20140303631A1 (en) * | 2013-04-05 | 2014-10-09 | Thornberry Technologies, LLC | Method and apparatus for determining the orientation and/or position of an object during a medical procedure |
| US9987148B2 (en) * | 2013-06-11 | 2018-06-05 | Orthosoft Inc. | Acetabular cup prosthesis positioning instrument and method |
| DE102013214067A1 (de) * | 2013-07-17 | 2015-01-22 | Fiagon Gmbh | Vorrichtung und Verfahren zur Anbindung eines medizinischen Instruments an ein Lageerfassungssystem |
| EP3035881A1 (en) * | 2013-08-13 | 2016-06-29 | Brainlab AG | Medical registration apparatus and method for registering an axis |
| US10463415B2 (en) | 2013-10-14 | 2019-11-05 | Navbit Holdings Pty Ltd | Alignment apparatus for use in hip arthroplasty |
| DE102013222230A1 (de) | 2013-10-31 | 2015-04-30 | Fiagon Gmbh | Chirurgisches Instrument |
| US20150142372A1 (en) * | 2013-11-19 | 2015-05-21 | Polaris Surgical, LLC | Prosthetic placement tool and associated methods |
| CN103735303B (zh) * | 2014-01-07 | 2015-09-30 | 清华大学 | 全髋关节置换术中髋关节内部实时可视辅助定位系统 |
| US9947110B2 (en) * | 2014-02-13 | 2018-04-17 | Brainlab Ag | Method for assisting the positioning of a medical structure on the basis of two-dimensional image data |
| US10758198B2 (en) | 2014-02-25 | 2020-09-01 | DePuy Synthes Products, Inc. | Systems and methods for intra-operative image analysis |
| US10433914B2 (en) | 2014-02-25 | 2019-10-08 | JointPoint, Inc. | Systems and methods for intra-operative image analysis |
| CN104068861B (zh) * | 2014-07-03 | 2017-02-01 | 波纳维科(天津)医疗科技有限公司 | 一种股骨长度测量装置 |
| US20160128783A1 (en) | 2014-10-29 | 2016-05-12 | Intellijoint Surgical Inc. | Surgical navigation system with one or more body borne components and method therefor |
| EP3215042A4 (en) * | 2014-11-06 | 2018-06-20 | Orthosoft Inc. | Instrument navigation in computer-assisted hip surgery |
| GB2534359A (en) * | 2015-01-15 | 2016-07-27 | Corin Ltd | System and method for patient implant alignment |
| US10363149B2 (en) | 2015-02-20 | 2019-07-30 | OrthAlign, Inc. | Hip replacement navigation system and method |
| PL228801B1 (pl) * | 2015-02-24 | 2018-05-30 | Politechnika Lodzka | Urządzenie do pomiaru zmiany położenia kości udowej podczas endoprotezoplastyki całkowitej stawu biodrowego |
| EP3265009B1 (en) * | 2015-03-05 | 2023-03-29 | Atracsys Sàrl | Redundant reciprocal tracking system |
| EP3273865A4 (en) | 2015-03-24 | 2018-12-05 | Mirus LLC | Systems and methods for placement of surgical instrumentation |
| WO2016162898A1 (ja) * | 2015-04-04 | 2016-10-13 | 小川 博之 | 基材の側面から半球状カップを挿入するため、或いは、基材にステムを挿入するための補助表示装置及び人工関節置換術用のガイド器具 |
| GB201509887D0 (en) * | 2015-06-08 | 2015-07-22 | Univ Strathclyde | Remote operations system |
| WO2017004714A1 (en) * | 2015-07-06 | 2017-01-12 | Orthosoft Inc. | Leg length and offset calculation in computer-assisted surgery using rangefinder |
| EP4209199A1 (en) * | 2015-08-21 | 2023-07-12 | HIP Innovation Technology, LLC | Trial acetabular cup for reverse hip prosthesis |
| EP3162316B1 (en) * | 2015-11-02 | 2023-01-11 | Medivation AG | A surgical instrument system |
| US20170136296A1 (en) * | 2015-11-18 | 2017-05-18 | Osvaldo Andres Barrera | System and method for physical rehabilitation and motion training |
| CA3034447A1 (en) * | 2015-12-18 | 2017-06-22 | JointPoint, Inc. | Systems and methods for intra-operative image analysis |
| CN105559884B (zh) * | 2016-02-04 | 2018-10-23 | 清华大学 | 一种全髋关节置换手术中骨盆姿态获取方法与系统 |
| AU2017228417B2 (en) | 2016-03-03 | 2022-09-15 | Howmedica Osteonics Corp. | Orthopedic leg alignment system and method |
| BR112018068656A2 (pt) * | 2016-03-14 | 2019-02-05 | R Mahfouz Mohamed | posicionamento de banda ultralarga para comunicação e rastreamento por ultrassom sem fio |
| CN109475302A (zh) * | 2016-05-11 | 2019-03-15 | 阿思罗美达公司 | 患者特定假体对准 |
| US10182871B2 (en) | 2016-05-22 | 2019-01-22 | JointPoint, Inc. | Systems and methods for intra-operative image acquisition and calibration |
| WO2018006026A1 (en) | 2016-06-30 | 2018-01-04 | Orthogrid Systems S.A.R.L | Surgical instrument positioning system, apparatus and method of use as a non-invasive anatomical reference |
| EP3484398A1 (en) | 2016-07-15 | 2019-05-22 | MAKO Surgical Corp. | Systems for a robotic-assisted revision procedure |
| AU2017323599B2 (en) * | 2016-09-07 | 2023-04-13 | Richard Tyler Fanson | Systems and methods for surgical navigation, including image-guided navigation of a patient's head |
| WO2018075784A1 (en) | 2016-10-21 | 2018-04-26 | Syverson Benjamin | Methods and systems for setting trajectories and target locations for image guided surgery |
| WO2018085900A1 (en) | 2016-11-14 | 2018-05-17 | Navbit Holdings Pty Limited | Alignment apparatus for use in surgery |
| SG11201904437QA (en) * | 2016-11-15 | 2019-09-27 | Advanced Ortho Med Technology Inc | Alignment guide for acetabular implant surgery and methods for use |
| US10595943B2 (en) | 2016-12-08 | 2020-03-24 | The Cleveland Clinic Foundation | Model-based surgical planning and implant placement |
| US10441365B2 (en) | 2017-01-11 | 2019-10-15 | Synaptive Medical (Barbados) Inc. | Patient reference device |
| FR3062297B1 (fr) * | 2017-02-01 | 2022-07-15 | Laurent Cazal | Procede et dispositif d'assistance a la pose d'une prothese, notamment de hanche, par un chirurgien suivant differents protocoles chirurgicaux |
| EP3592273B1 (en) * | 2017-03-10 | 2023-10-04 | Biomet Manufacturing, LLC | Augmented reality supported knee surgery |
| EP3595554A4 (en) | 2017-03-14 | 2021-01-06 | OrthAlign, Inc. | HIP REPLACEMENT NAVIGATION SYSTEM AND PROCEDURE |
| EP4252697A3 (en) * | 2017-03-14 | 2024-03-27 | Stephen B. Murphy | Systems and methods for determining leg length change during hip surgery |
| JP7344122B2 (ja) | 2017-03-14 | 2023-09-13 | オースアライン・インコーポレイテッド | 軟部組織の測定およびバランシングを行うシステムおよび方法 |
| US10881530B2 (en) * | 2017-04-28 | 2021-01-05 | Warsaw Orthopedic, Inc. | Surgical instrument and method |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| EP4344658A2 (en) | 2017-05-10 | 2024-04-03 | MAKO Surgical Corp. | Robotic spine surgery system |
| CN107088091A (zh) * | 2017-06-08 | 2017-08-25 | 广州技特电子科技有限公司 | 一种辅助骨科手术的手术导航系统及导航方法 |
| US11647920B2 (en) * | 2017-09-15 | 2023-05-16 | Mirus Llc | Systems and methods for measurement of anatomic alignment |
| CN109800617B (zh) * | 2017-11-15 | 2021-04-16 | 张昊华 | 一种检测骨锉楔入松紧程度的方法及设备 |
| WO2019147948A1 (en) | 2018-01-26 | 2019-08-01 | Mako Surgical Corp. | End effectors, systems, and methods for impacting prosthetics guided by surgical robots |
| CN108283561A (zh) * | 2018-01-29 | 2018-07-17 | 北京大学深圳医院(北京大学深圳临床医学院) | 用于髋关节置换术中骨盆移位的实时监测装置及方法 |
| WO2019163906A1 (ja) * | 2018-02-21 | 2019-08-29 | オリンパス株式会社 | 医療システムおよび医療システムの作動方法 |
| US11771500B2 (en) * | 2018-03-07 | 2023-10-03 | HipNav Technologies, LLC | Surgical navigation using a guide for instrumentation positioning |
| WO2019219274A1 (fr) * | 2018-05-16 | 2019-11-21 | Py Jean Pierre | Dispositif chirurgical |
| EP3810021A1 (en) | 2018-06-19 | 2021-04-28 | Tornier, Inc. | Automated instrument or component assistance using mixed reality in orthopedic surgical procedures |
| CA3094852C (en) | 2018-06-20 | 2022-07-12 | Techmah Medical Llc | Methods and devices for knee surgery with inertial sensors |
| TWI663954B (zh) * | 2018-06-22 | 2019-07-01 | 國立臺灣師範大學 | 人工髖關節置換之安裝角度感測系統及其方法 |
| US20200129241A1 (en) * | 2018-10-30 | 2020-04-30 | Think Surgical, Inc. | Surgical markers for robotic surgery with reduced bone penetration |
| CN109498102B (zh) * | 2018-12-07 | 2024-03-26 | 北京天智航医疗科技股份有限公司 | 测深装置及磨削装置 |
| EP3719749A1 (en) | 2019-04-03 | 2020-10-07 | Fiagon AG Medical Technologies | Registration method and setup |
| JP7322183B2 (ja) * | 2019-05-14 | 2023-08-07 | ホウメディカ・オステオニクス・コーポレイション | 整形外科インプラント埋植のための骨壁追跡及びガイダンス |
| CN110680503B (zh) * | 2019-09-30 | 2021-04-30 | 北京爱康宜诚医疗器材有限公司 | 髋臼锉磨的测量装置与系统 |
| CN110584738B (zh) * | 2019-09-30 | 2021-03-12 | 北京爱康宜诚医疗器材有限公司 | 髋臼锉磨参数的测量方法、测量装置、存储介质和处理器 |
| WO2021127025A1 (en) * | 2019-12-18 | 2021-06-24 | Tornier, Inc. | Surgical guidance for surgical tools |
| EP3903683B1 (en) * | 2020-04-28 | 2022-06-15 | See Through S.r.l. | Medical or dental imaging system with motion compensation |
| CN113332008B (zh) * | 2021-05-24 | 2022-09-20 | 汕头大学 | 一种髋关节置换术中股骨长度的确定方法及系统 |
| US11887306B2 (en) | 2021-08-11 | 2024-01-30 | DePuy Synthes Products, Inc. | System and method for intraoperatively determining image alignment |
| ES2945484B2 (es) * | 2021-12-30 | 2023-12-15 | Planificacion Iqx Conrado Sl | Instrumental quirúrgico para cirugía vertebral mediante software de planificación y navegación quirúrgica |
| US20230310114A1 (en) * | 2022-02-14 | 2023-10-05 | Nview Medical Inc. | Surgical Navigation System with Distributed Patient Reference Tracking |
Family Cites Families (181)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5141512A (en) * | 1989-08-28 | 1992-08-25 | Farmer Malcolm H | Alignment of hip joint sockets in hip joint replacement |
| US4994064A (en) | 1989-12-21 | 1991-02-19 | Aboczky Robert I | Instrument for orienting, inserting and impacting an acetabular cup prosthesis |
| US5122145A (en) | 1990-11-09 | 1992-06-16 | Fishbane Bruce M | Measuring device for use in total hip replacement |
| US5480439A (en) | 1991-02-13 | 1996-01-02 | Lunar Corporation | Method for periprosthetic bone mineral density measurement |
| US5249581A (en) | 1991-07-15 | 1993-10-05 | Horbal Mark T | Precision bone alignment |
| US5227985A (en) | 1991-08-19 | 1993-07-13 | University Of Maryland | Computer vision system for position monitoring in three dimensions using non-coplanar light sources attached to a monitored object |
| FR2684287B3 (fr) | 1991-12-03 | 1994-03-11 | Chagneau Francis | Dispositif de controle du positionnement du membre inferieur lors d'une arthroplastie de la hanche. |
| DE69424416T2 (de) | 1993-06-21 | 2001-01-04 | Howmedica Osteonics Corp | Vorrichtung zur lokalisierung funktioneller strukturen des beins während der kniegelenkschirurgie |
| DE19506197A1 (de) | 1995-02-23 | 1996-09-05 | Aesculap Ag | Verfahren und Vorrichtung zur Ortsbestimmung eines Körperteils |
| US5854843A (en) | 1995-06-07 | 1998-12-29 | The United States Of America As Represented By The Secretary Of The Air Force | Virtual navigator, and inertial angular measurement system |
| US5966827A (en) | 1996-05-06 | 1999-10-19 | Horvath; Laura | Method and apparatus for measuring pelvic symmetry |
| US5772610A (en) | 1996-08-14 | 1998-06-30 | Liberty Mutual Group | Method and apparatus for dynamic and direct measurement of lumbar lordosis |
| US6009189A (en) | 1996-08-16 | 1999-12-28 | Schaack; David F. | Apparatus and method for making accurate three-dimensional size measurements of inaccessible objects |
| US5700268A (en) | 1997-01-06 | 1997-12-23 | Zimmer, Inc. | Device for measuring leg length and off-set for a total hip replacement |
| US5880976A (en) | 1997-02-21 | 1999-03-09 | Carnegie Mellon University | Apparatus and method for facilitating the implantation of artificial components in joints |
| US5956660A (en) | 1997-07-23 | 1999-09-21 | Analogic Corporation | Personal inertial surveying system |
| US20030163142A1 (en) * | 1997-11-27 | 2003-08-28 | Yoav Paltieli | System and method for guiding the movements of a device to a target particularly for medical applications |
| US6061644A (en) | 1997-12-05 | 2000-05-09 | Northern Digital Incorporated | System for determining the spatial position and orientation of a body |
| US6161032A (en) | 1998-03-30 | 2000-12-12 | Biosense, Inc. | Three-axis coil sensor |
| US6529765B1 (en) | 1998-04-21 | 2003-03-04 | Neutar L.L.C. | Instrumented and actuated guidance fixture for sterotactic surgery |
| ES2228043T3 (es) | 1998-05-28 | 2005-04-01 | Orthosoft, Inc. | Sistema quirurgico interactivo asistido por ordenador. |
| US6477400B1 (en) | 1998-08-20 | 2002-11-05 | Sofamor Danek Holdings, Inc. | Fluoroscopic image guided orthopaedic surgery system with intraoperative registration |
| US6692447B1 (en) * | 1999-02-16 | 2004-02-17 | Frederic Picard | Optimizing alignment of an appendicular |
| US8187303B2 (en) | 2004-04-22 | 2012-05-29 | Gmedelaware 2 Llc | Anti-rotation fixation element for spinal prostheses |
| US7747312B2 (en) | 2000-01-04 | 2010-06-29 | George Mason Intellectual Properties, Inc. | System and method for automatic shape registration and instrument tracking |
| US6395005B1 (en) | 2000-04-14 | 2002-05-28 | Howmedica Osteonics Corp. | Acetabular alignment apparatus and method |
| WO2002002028A1 (en) * | 2000-07-06 | 2002-01-10 | Synthes Ag Chur | Method and device for impingement detection |
| US20020016634A1 (en) | 2000-07-28 | 2002-02-07 | Brian Maroney | Device and method for positioning an eccentric humeral head of a humerus prothesis for a shoulder arthroplasty |
| US6928742B2 (en) | 2000-08-31 | 2005-08-16 | Plus Orthopedics Ag | Method and apparatus for finding the position of a mechanical axis of a limb |
| US6917827B2 (en) * | 2000-11-17 | 2005-07-12 | Ge Medical Systems Global Technology Company, Llc | Enhanced graphic features for computer assisted surgery system |
| US6607487B2 (en) | 2001-01-23 | 2003-08-19 | The Regents Of The University Of California | Ultrasound image guided acetabular implant orientation during total hip replacement |
| JP4113779B2 (ja) * | 2001-02-27 | 2008-07-09 | スミス アンド ネフュー インコーポレーテッド | 単一区画膝関節用外科手術誘導システム及び方法 |
| US7547307B2 (en) | 2001-02-27 | 2009-06-16 | Smith & Nephew, Inc. | Computer assisted knee arthroplasty instrumentation, systems, and processes |
| NO20011769D0 (no) * | 2001-04-06 | 2001-04-06 | Bjoern Franc Iversen | Anordning og system for gjensidig posisjonering av protesedeler |
| FR2831794B1 (fr) | 2001-11-05 | 2004-02-13 | Depuy France | Procede de selection d'elements de prothese de genou et dispositif pour sa mise en oeuvre |
| AU2002361621A1 (en) * | 2001-11-14 | 2003-05-26 | Michael R. White | Apparatus and methods for making intraoperative orthopedic measurements |
| US20030153978A1 (en) * | 2002-02-08 | 2003-08-14 | Whiteside Biomechanics, Inc. | Apparatus and method of ligament balancing and component fit check in total knee arthroplasty |
| US7634306B2 (en) | 2002-02-13 | 2009-12-15 | Kinamed, Inc. | Non-image, computer assisted navigation system for joint replacement surgery with modular implant system |
| US6711431B2 (en) | 2002-02-13 | 2004-03-23 | Kinamed, Inc. | Non-imaging, computer assisted navigation system for hip replacement surgery |
| US8010180B2 (en) * | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US6887247B1 (en) | 2002-04-17 | 2005-05-03 | Orthosoft Inc. | CAS drill guide and drill tracking system |
| US6757582B2 (en) | 2002-05-03 | 2004-06-29 | Carnegie Mellon University | Methods and systems to control a shaping tool |
| DE10306793A1 (de) | 2002-05-21 | 2003-12-04 | Plus Endoprothetik Ag Rotkreuz | Anordnung und Verfahren zur intraoperativen Festlegung der Lage eines Gelenkersatzimplantats |
| US6978167B2 (en) | 2002-07-01 | 2005-12-20 | Claron Technology Inc. | Video pose tracking system and method |
| WO2004014219A2 (en) | 2002-08-09 | 2004-02-19 | Kinamed, Inc. | Non-imaging tracking tools and method for hip replacement surgery |
| WO2004016178A2 (en) | 2002-08-16 | 2004-02-26 | Orthosoft Inc. | Interface apparatus for passive tracking systems and method of use thereof |
| EP1402855B1 (de) * | 2002-09-24 | 2004-09-01 | BrainLAB AG | Vorrichtung und Verfahren zum Bestimmen des Öffnungswinkels eines Gelenks |
| JP2006509609A (ja) | 2002-10-04 | 2006-03-23 | オルトソフト インコーポレイテッド | コンピュータ支援の人工股関節置換手術 |
| US8231554B2 (en) | 2002-11-05 | 2012-07-31 | Brainlab Ag | Method and device for registering a femur implant |
| US8034057B2 (en) | 2002-11-07 | 2011-10-11 | Penenberg Brad L | Apparatus for, and method of, preparing for and inserting hip joint prosthesis using computer guidance |
| US7209776B2 (en) | 2002-12-03 | 2007-04-24 | Aesculap Ag & Co. Kg | Method of determining the position of the articular point of a joint |
| US6889833B2 (en) | 2002-12-30 | 2005-05-10 | Calypso Medical Technologies, Inc. | Packaged systems for implanting markers in a patient and methods for manufacturing and using such systems |
| US6925339B2 (en) | 2003-02-04 | 2005-08-02 | Zimmer Technology, Inc. | Implant registration device for surgical navigation system |
| US6988009B2 (en) * | 2003-02-04 | 2006-01-17 | Zimmer Technology, Inc. | Implant registration device for surgical navigation system |
| WO2004089192A2 (en) | 2003-04-02 | 2004-10-21 | Kinamed, Inc. | Pelvic plane locator and patient positioner |
| US20040243148A1 (en) * | 2003-04-08 | 2004-12-02 | Wasielewski Ray C. | Use of micro- and miniature position sensing devices for use in TKA and THA |
| KR100533321B1 (ko) | 2003-04-21 | 2005-12-05 | 한국과학기술원 | 골반정합을 위한 t형 게이지장치 |
| US7559931B2 (en) | 2003-06-09 | 2009-07-14 | OrthAlign, Inc. | Surgical orientation system and method |
| WO2004112610A2 (en) | 2003-06-09 | 2004-12-29 | Vitruvian Orthopaedics, Llc | Surgical orientation device and method |
| US7427272B2 (en) | 2003-07-15 | 2008-09-23 | Orthosoft Inc. | Method for locating the mechanical axis of a femur |
| US20050015002A1 (en) * | 2003-07-18 | 2005-01-20 | Dixon Gary S. | Integrated protocol for diagnosis, treatment, and prevention of bone mass degradation |
| US20050065617A1 (en) | 2003-09-05 | 2005-03-24 | Moctezuma De La Barrera Jose Luis | System and method of performing ball and socket joint arthroscopy |
| US7392076B2 (en) | 2003-11-04 | 2008-06-24 | Stryker Leibinger Gmbh & Co. Kg | System and method of registering image data to intra-operatively digitized landmarks |
| EP1706054A1 (en) * | 2004-01-22 | 2006-10-04 | Smith and Nephew, Inc. | Methods, systems, and apparatuses for providing patient-mounted surgical navigational sensors |
| FR2865928B1 (fr) * | 2004-02-10 | 2006-03-17 | Tornier Sa | Dispositif chirurgical d'implantation d'une prothese totale de hanche |
| JP4712791B2 (ja) | 2004-03-05 | 2011-06-29 | デピュー インターナショナル リミテッド | 骨盤の位置合わせ方法および装置 |
| WO2005087125A2 (en) | 2004-03-10 | 2005-09-22 | Depuy International Ltd | Orthopaedic operating systems, methods, implants and instruments |
| US7657298B2 (en) | 2004-03-11 | 2010-02-02 | Stryker Leibinger Gmbh & Co. Kg | System, device, and method for determining a position of an object |
| US20050245820A1 (en) * | 2004-04-28 | 2005-11-03 | Sarin Vineet K | Method and apparatus for verifying and correcting tracking of an anatomical structure during surgery |
| US7927298B2 (en) | 2004-06-23 | 2011-04-19 | Warner Michael J | Method and apparatus for inducing and detecting ankle torsion |
| US20060004284A1 (en) | 2004-06-30 | 2006-01-05 | Frank Grunschlager | Method and system for generating three-dimensional model of part of a body from fluoroscopy image data and specific landmarks |
| US7658753B2 (en) * | 2004-08-03 | 2010-02-09 | K Spine, Inc. | Device and method for correcting a spinal deformity |
| EP1632193A1 (de) | 2004-09-02 | 2006-03-08 | BrainLAB AG | Hüftregistrierungssystem |
| US8007448B2 (en) * | 2004-10-08 | 2011-08-30 | Stryker Leibinger Gmbh & Co. Kg. | System and method for performing arthroplasty of a joint and tracking a plumb line plane |
| US20060122541A1 (en) * | 2004-11-08 | 2006-06-08 | Gregor Tuma | Adjusting the length of the leg |
| US20060100508A1 (en) * | 2004-11-10 | 2006-05-11 | Morrison Matthew M | Method and apparatus for expert system to track and manipulate patients |
| EP1828845A2 (en) | 2004-12-01 | 2007-09-05 | Carl Zeiss SMT AG | Projection exposure system, beam delivery system and method of generating a beam of light |
| AU2005311752A1 (en) * | 2004-12-02 | 2006-06-08 | Smith & Nephew, Inc. | Systems for providing a reference plane for mounting an acetabular cup |
| US20060161052A1 (en) | 2004-12-08 | 2006-07-20 | Perception Raisonnement Action En Medecine | Computer assisted orthopaedic surgery system for ligament graft reconstruction |
| US20060155382A1 (en) | 2005-01-07 | 2006-07-13 | Orthopaedic Development, Llc. | Canulized prosthesis for total hip replacement surgery |
| DE102005003318A1 (de) | 2005-01-17 | 2006-07-27 | Aesculap Ag & Co. Kg | Verfahren zur Anzeige der Position und Orientierung eines chirurgischen Werkzeuges und Vorrichtung zur Durchführung dieses Verfahrens |
| EP1841372B1 (en) | 2005-01-26 | 2017-09-13 | Orthosoft Inc. | Computer-assisted hip joint resurfacing method and system |
| US7588571B2 (en) | 2005-03-18 | 2009-09-15 | Ron Anthon Olsen | Adjustable splint for osteosynthesis with modular joint |
| GB0505782D0 (en) | 2005-03-22 | 2005-04-27 | Depuy Int Ltd | Surgical guide |
| US20100100011A1 (en) * | 2008-10-22 | 2010-04-22 | Martin Roche | System and Method for Orthopedic Alignment and Measurement |
| GB0507243D0 (en) | 2005-04-09 | 2005-05-18 | Depuy Int Ltd | Acetabular cup positioning |
| KR100706030B1 (ko) * | 2005-04-12 | 2007-04-11 | 한국과학기술원 | 참조기구를 이용한 비구컵 항행장치 및 이를 이용한 비구컵항행방법 |
| EP1883780B1 (en) | 2005-05-20 | 2013-07-03 | Orthosoft, Inc. | Method and apparatus for calibrating spherical objects using a computer system |
| WO2006122419A1 (en) | 2005-05-20 | 2006-11-23 | Orthosoft Inc. | Method and apparatus for calibrating circular objects using a computer tracking system |
| US7955280B2 (en) | 2005-06-02 | 2011-06-07 | Orthosoft Inc. | Leg alignment for surgical parameter measurement in hip replacement surgery |
| US8320612B2 (en) | 2005-06-09 | 2012-11-27 | Naviswiss Ag | System and method for the contactless determination and measurement of a spatial position and/or a spatial orientation of bodies, method for the calibration and testing, in particular, medical tools as well as patterns or structures on, in particular, medical tools |
| US8548559B2 (en) | 2005-06-17 | 2013-10-01 | Orthosoft, Inc. | Method and apparatus for computer-assisted femoral head resurfacing |
| US7840256B2 (en) | 2005-06-27 | 2010-11-23 | Biomet Manufacturing Corporation | Image guided tracking array and method |
| US7835784B2 (en) | 2005-09-21 | 2010-11-16 | Medtronic Navigation, Inc. | Method and apparatus for positioning a reference frame |
| DE102005047895B4 (de) | 2005-10-06 | 2009-04-09 | Aesculap Ag | Verfahren und Einrichtung zur Bestimmung der Lage eines Gegenstandes |
| US20070118139A1 (en) | 2005-10-14 | 2007-05-24 | Cuellar Alberto D | System and method for bone resection |
| US8000926B2 (en) | 2005-11-28 | 2011-08-16 | Orthosensor | Method and system for positional measurement using ultrasonic sensing |
| DE602006001836D1 (de) | 2006-01-10 | 2008-08-28 | Brainlab Ag | Apparat zur Bestimmung des Ortes des Femurkopfes |
| US20070225595A1 (en) | 2006-01-17 | 2007-09-27 | Don Malackowski | Hybrid navigation system for tracking the position of body tissue |
| WO2007087351A2 (en) | 2006-01-24 | 2007-08-02 | Carnegie Mellon University | Method, apparatus, and system for computer-aided tracking, navigation, and motion teaching |
| CN101400323A (zh) * | 2006-01-31 | 2009-04-01 | 罗伯特·利耶 | 定位支架 |
| US8095198B2 (en) * | 2006-01-31 | 2012-01-10 | Warsaw Orthopedic. Inc. | Methods for detecting osteolytic conditions in the body |
| US7885705B2 (en) * | 2006-02-10 | 2011-02-08 | Murphy Stephen B | System and method for facilitating hip surgery |
| US8337426B2 (en) * | 2009-03-24 | 2012-12-25 | Biomet Manufacturing Corp. | Method and apparatus for aligning and securing an implant relative to a patient |
| US8167823B2 (en) * | 2009-03-24 | 2012-05-01 | Biomet Manufacturing Corp. | Method and apparatus for aligning and securing an implant relative to a patient |
| US20120209117A1 (en) | 2006-03-08 | 2012-08-16 | Orthosensor, Inc. | Surgical Measurement Apparatus and System |
| US7949386B2 (en) * | 2006-03-21 | 2011-05-24 | A2 Surgical | Computer-aided osteoplasty surgery system |
| US8165659B2 (en) * | 2006-03-22 | 2012-04-24 | Garrett Sheffer | Modeling method and apparatus for use in surgical navigation |
| EP1996108A4 (en) | 2006-03-23 | 2017-06-21 | Orthosoft, Inc. | Method and system for tracking tools in computer-assisted surgery |
| US7876942B2 (en) | 2006-03-30 | 2011-01-25 | Activiews Ltd. | System and method for optical position measurement and guidance of a rigid or semi-flexible tool to a target |
| US7400246B2 (en) | 2006-04-11 | 2008-07-15 | Russell Mark Breeding | Inertial Sensor Tracking System |
| US20070270686A1 (en) | 2006-05-03 | 2007-11-22 | Ritter Rogers C | Apparatus and methods for using inertial sensing to navigate a medical device |
| CA2690896A1 (en) | 2006-06-19 | 2007-12-27 | Igo Technologies Inc. | Joint placement methods and apparatuses |
| US20080021567A1 (en) | 2006-07-18 | 2008-01-24 | Zimmer Technology, Inc. | Modular orthopaedic component case |
| CA2658510C (en) | 2006-07-21 | 2013-01-15 | Orthosoft Inc. | Non-invasive tracking of bones for surgery |
| EP1882457B1 (de) | 2006-07-25 | 2012-03-28 | BrainLAB AG | Verfahren und Vorrichtung zur Darstellung von Objektausrichtung an Kugelgelenken |
| US7728868B2 (en) * | 2006-08-02 | 2010-06-01 | Inneroptic Technology, Inc. | System and method of providing real-time dynamic imagery of a medical procedure site using multiple modalities |
| EP2049867A1 (en) | 2006-08-03 | 2009-04-22 | Orthosoft, Inc. | Computer-assisted surgery tools and system |
| US7594933B2 (en) | 2006-08-08 | 2009-09-29 | Aesculap Ag | Method and apparatus for positioning a bone prosthesis using a localization system |
| EP1894538B1 (de) | 2006-09-01 | 2009-11-04 | BrainLAB AG | Verfahren und Vorrichtung zum Bestimmen der Lage von Beckenebenen |
| US20080125785A1 (en) | 2006-09-25 | 2008-05-29 | Gursharan Singh Chana | Targeting Device |
| EP1905355B1 (de) * | 2006-09-21 | 2011-09-21 | BrainLAB AG | Beckenregistrierungsvorrichtung für die medizintechnische Navigation |
| WO2008044679A1 (fr) * | 2006-10-10 | 2008-04-17 | Saga University | Système de soutien chirurgical |
| US20080146969A1 (en) | 2006-12-15 | 2008-06-19 | Kurtz William B | Total joint replacement component positioning as predetermined distance from center of rotation of the joint using pinless navigation |
| US20080194997A1 (en) * | 2007-02-08 | 2008-08-14 | Rehabilitation Institute Of Chicago | System and method for diagnosing and treating patellar maltracking and malalignment |
| US8814874B2 (en) * | 2007-02-13 | 2014-08-26 | Medtronic Navigation, Inc. | Navigated cut guide for total knee reconstruction |
| US20080249394A1 (en) * | 2007-04-03 | 2008-10-09 | The Board Of Trustees Of The Leland Stanford Junior University | Method for improved rotational alignment in joint arthroplasty |
| US9044345B2 (en) | 2007-05-22 | 2015-06-02 | Brainlab Ag | Navigated placement of pelvic implant based on combined anteversion by applying Ranawat's sign or via arithmetic formula |
| US9532848B2 (en) | 2007-06-15 | 2017-01-03 | Othosoft, Inc. | Computer-assisted surgery system and method |
| WO2009000074A1 (en) | 2007-06-22 | 2008-12-31 | Orthosoft Inc. | Computer-assisted surgery system with user interface |
| DE102007060263A1 (de) | 2007-08-16 | 2009-02-26 | Steinbichler Optotechnik Gmbh | Vorrichtung zur Ermittlung der 3D-Koordinaten eines Objekts, insbesondere eines Zahns |
| US8790351B2 (en) | 2007-10-10 | 2014-07-29 | Orthosoft Inc. | Hip replacement in computer-assisted surgery |
| DE102007049668B3 (de) * | 2007-10-17 | 2009-04-16 | Aesculap Ag | Verfahren und Vorrichtung zur Bestimmung der Winkellage einer Hüftgelenkpfanne in einem Beckenknochen |
| WO2009059434A1 (en) | 2007-11-08 | 2009-05-14 | Orthosoft Inc. | Trackable reference device for computer-assisted surgery |
| EP2164429A4 (en) | 2007-11-14 | 2017-05-03 | Orthosoft, Inc. | Leg alignment and length measurement in hip replacement surgery |
| EP2227719B1 (en) | 2007-11-19 | 2020-01-08 | Blue Ortho | Hip implant registration in computer assisted surgery |
| JP2011504769A (ja) | 2007-11-30 | 2011-02-17 | オーソソフト インコーポレイテッド | 光学追跡casシステム |
| US20090163930A1 (en) | 2007-12-19 | 2009-06-25 | Ahmed Aoude | Calibration system of a computer-assisted surgery system |
| US8696458B2 (en) | 2008-02-15 | 2014-04-15 | Thales Visionix, Inc. | Motion tracking system and method using camera and non-camera sensors |
| EP2242453B1 (en) * | 2008-02-20 | 2018-11-28 | Mako Surgical Corp. | Implant planning using corrected captured joint motion information |
| GB0803725D0 (en) | 2008-02-29 | 2008-04-09 | Depuy Int Ltd | Surgical apparatus and procedure |
| AU2009219100B2 (en) * | 2008-02-29 | 2014-09-11 | Silesco Pty Ltd | An orthopaedic safety system |
| US8828008B2 (en) | 2008-03-05 | 2014-09-09 | Allston J. Stubbs | Apparatus for arthroscopic assisted arthroplasty of the hip joint |
| CA2700478A1 (en) * | 2008-03-13 | 2009-09-17 | Orthosoft Inc. | Tracking cas system |
| US8494825B2 (en) | 2008-03-13 | 2013-07-23 | Robert L. Thornberry | Computer-guided system for orienting the acetabular cup in the pelvis during total hip replacement surgery |
| WO2009117833A1 (en) | 2008-03-25 | 2009-10-01 | Orthosoft Inc. | Method and system for planning/guiding alterations to a bone |
| US20090306499A1 (en) * | 2008-06-09 | 2009-12-10 | Mako Surgical Corp. | Self-detecting kinematic clamp assembly |
| EP2240111B1 (en) | 2008-06-18 | 2019-07-24 | Mako Surgical Corp. | Fiber optic tracking system |
| FR2932677B1 (fr) | 2008-06-20 | 2010-06-25 | Univ Bretagne Occidentale | Systeme d'aide a l'implantation d'une prothese de hanche sur un individu. |
| EP2344078B1 (en) | 2008-07-24 | 2018-04-18 | OrthAlign, Inc. | Systems for joint replacement |
| US20110190637A1 (en) | 2008-08-18 | 2011-08-04 | Naviswiss Ag | Medical measuring system, method for surgical intervention as well as use of a medical measuring system |
| US10667727B2 (en) * | 2008-09-05 | 2020-06-02 | Varian Medical Systems, Inc. | Systems and methods for determining a state of a patient |
| ES2750264T3 (es) * | 2008-09-10 | 2020-03-25 | Orthalign Inc | Sistemas de cirugía de la cadera |
| WO2010063117A1 (en) | 2008-12-02 | 2010-06-10 | Andre Novomir Hladio | Method and system for aligning a prosthesis during surgery using active sensors |
| US9364291B2 (en) | 2008-12-11 | 2016-06-14 | Mako Surgical Corp. | Implant planning using areas representing cartilage |
| US20100191100A1 (en) * | 2009-01-23 | 2010-07-29 | Warsaw Orthopedic, Inc. | Methods and systems for diagnosing, treating, or tracking spinal disorders |
| US8690776B2 (en) * | 2009-02-17 | 2014-04-08 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image guided surgery |
| US8641621B2 (en) * | 2009-02-17 | 2014-02-04 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image management in image-guided medical procedures |
| US8554307B2 (en) * | 2010-04-12 | 2013-10-08 | Inneroptic Technology, Inc. | Image annotation in image-guided medical procedures |
| EP2258283B1 (de) | 2009-06-05 | 2013-08-28 | BrainLAB AG | Werkzeugaufsatz für medizintechnische Anwendungen |
| CN201445559U (zh) * | 2009-08-12 | 2010-05-05 | 苏纪权 | 三维立体角度定位器 |
| EP2467798B1 (en) | 2009-08-17 | 2020-04-15 | Mazor Robotics Ltd. | Device for improving the accuracy of manual operations |
| JP5807787B2 (ja) | 2009-08-27 | 2015-11-10 | ナヴィスウィス エージー | 内視鏡 |
| WO2011029466A1 (en) | 2009-09-08 | 2011-03-17 | Brainlab Ag | Determining a plane of an anatomical body part |
| US9011448B2 (en) * | 2009-12-31 | 2015-04-21 | Orthosensor Inc. | Orthopedic navigation system with sensorized devices |
| WO2012082164A1 (en) * | 2010-01-21 | 2012-06-21 | Orthallgn, Inc. | Systems and methods for joint replacement |
| US10588647B2 (en) | 2010-03-01 | 2020-03-17 | Stryker European Holdings I, Llc | Computer assisted surgery system |
| JP2013523415A (ja) * | 2010-04-14 | 2013-06-17 | スミス アンド ネフュー インコーポレーテッド | 患者立脚型コンピュータ支援外科的処置のためのシステムおよび方法 |
| US9706948B2 (en) * | 2010-05-06 | 2017-07-18 | Sachin Bhandari | Inertial sensor based surgical navigation system for knee replacement surgery |
| US8675939B2 (en) * | 2010-07-13 | 2014-03-18 | Stryker Leibinger Gmbh & Co. Kg | Registration of anatomical data sets |
| US20130116574A1 (en) | 2010-07-15 | 2013-05-09 | Naviswiss Ag | Method for ascertaining spatial coordinates |
| US9597156B2 (en) * | 2010-07-30 | 2017-03-21 | Orthosoft Inc. | Bone tracking with a gyroscope sensor in computer-assisted surgery |
| US8551108B2 (en) | 2010-08-31 | 2013-10-08 | Orthosoft Inc. | Tool and method for digital acquisition of a tibial mechanical axis |
| US20120065926A1 (en) | 2010-09-14 | 2012-03-15 | Samsung Electronics Co., Ltd | Integrated motion sensing apparatus |
| US8657809B2 (en) | 2010-09-29 | 2014-02-25 | Stryker Leibinger Gmbh & Co., Kg | Surgical navigation system |
| CA2821670A1 (en) | 2010-12-17 | 2012-06-21 | Avenir Medical Inc. | Method and system for aligning a prosthesis during surgery |
| EP2726132B1 (en) | 2011-07-01 | 2018-10-10 | Fisher & Paykel Healthcare Limited | Nasal mask interface assembly |
| WO2013116240A1 (en) * | 2012-01-30 | 2013-08-08 | Inneroptic Technology, Inc. | Multiple medical device guidance |
| WO2014057352A1 (de) | 2012-10-08 | 2014-04-17 | Naviswiss Ag | Messtaster und verfahren zum vermessen einer oberfläche |
| WO2018041984A1 (de) | 2016-09-02 | 2018-03-08 | Naviswiss Ag | Knochenklammer mit adapter für messhilfen |
| US20190290378A1 (en) | 2016-10-28 | 2019-09-26 | Naviswiss Ag | Sterile covering for an optical device |
-
2011
- 2011-12-16 CA CA 2821670 patent/CA2821670A1/en not_active Abandoned
- 2011-12-16 AU AU2011342900A patent/AU2011342900A1/en not_active Abandoned
- 2011-12-16 CN CN201180067896XA patent/CN103402450A/zh active Pending
- 2011-12-16 KR KR20137018638A patent/KR20130129246A/ko not_active Application Discontinuation
- 2011-12-16 US US13/328,997 patent/US9138319B2/en active Active
- 2011-12-16 WO PCT/IB2011/003246 patent/WO2012080840A1/en active Application Filing
- 2011-12-16 EP EP11849345.1A patent/EP2651344A4/en not_active Withdrawn
- 2011-12-16 JP JP2013543903A patent/JP2014508549A/ja active Pending
-
2013
- 2013-03-08 US US13/791,310 patent/US20130190887A1/en not_active Abandoned
-
2015
- 2015-07-15 US US14/799,909 patent/US10117748B2/en active Active
-
2016
- 2016-08-15 AU AU2016216525A patent/AU2016216525A1/en not_active Abandoned
-
2018
- 2018-11-05 US US16/180,517 patent/US11229520B2/en active Active
-
2021
- 2021-12-21 US US17/558,151 patent/US20220175537A1/en active Pending
-
2023
- 2023-02-17 US US18/111,235 patent/US11865008B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190044324A (ko) * | 2017-10-20 | 2019-04-30 | 울산대학교 산학협력단 | 구조물의 삽입 각도를 가이드 하는 방법, 장치 및 컴퓨터 프로그램 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9138319B2 (en) | 2015-09-22 |
| WO2012080840A1 (en) | 2012-06-21 |
| AU2011342900A1 (en) | 2013-07-18 |
| EP2651344A4 (en) | 2015-08-19 |
| JP2014508549A (ja) | 2014-04-10 |
| US20230200997A1 (en) | 2023-06-29 |
| US11865008B2 (en) | 2024-01-09 |
| EP2651344A1 (en) | 2013-10-23 |
| US20150313684A1 (en) | 2015-11-05 |
| CN103402450A (zh) | 2013-11-20 |
| US20130190887A1 (en) | 2013-07-25 |
| US10117748B2 (en) | 2018-11-06 |
| CA2821670A1 (en) | 2012-06-21 |
| US11229520B2 (en) | 2022-01-25 |
| US20120157887A1 (en) | 2012-06-21 |
| AU2016216525A1 (en) | 2016-09-15 |
| US20190070011A1 (en) | 2019-03-07 |
| US20220175537A1 (en) | 2022-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11865008B2 (en) | Method and system for determining a relative position of a tool | |
| AU2021203699B2 (en) | Systems, methods and devices for anatomical registration and surgical localization | |
| US11090170B2 (en) | Acetabular cup prosthesis positioning instrument and method | |
| US20200069438A1 (en) | Prosthetic placement tool and associated methods | |
| EP2720633B1 (en) | System and computer program for positioning an implant | |
| US20160360997A1 (en) | Systems and methods for measuring relative orientation and position of adjacent bones | |
| US20200163721A1 (en) | Patient-specific prosthesis alignment | |
| US20140303631A1 (en) | Method and apparatus for determining the orientation and/or position of an object during a medical procedure | |
| US20080051910A1 (en) | Method and apparatus for positioning a bone prosthesis using a localization system | |
| JP2004237101A (ja) | コンピュータ支援ナビゲーションシステムにおいて整形外科インプラントを記録するシステム及び方法、並びに、コンピュータ支援ナビゲーションシステムに使用するための組立体 | |
| WO2013164770A2 (en) | Handheld tracking systems and devices for aligning implant systems during surgery | |
| US20230141368A1 (en) | Assessment of Soft Tissue Tension In Hip Procedures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| N231 | Notification of change of applicant | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |