JP4332905B2 - 顕微鏡システム - Google Patents
顕微鏡システム Download PDFInfo
- Publication number
- JP4332905B2 JP4332905B2 JP02993398A JP2993398A JP4332905B2 JP 4332905 B2 JP4332905 B2 JP 4332905B2 JP 02993398 A JP02993398 A JP 02993398A JP 2993398 A JP2993398 A JP 2993398A JP 4332905 B2 JP4332905 B2 JP 4332905B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- image
- horizontal
- specimen
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images





Landscapes
- Microscoopes, Condenser (AREA)
- Control Of Position Or Direction (AREA)
Description
【発明の属する技術分野】
本発明は、標本を載置するステージの移動を、遠隔で制御可能な顕微鏡システムに関する。
【0002】
【従来の技術】
従来、標本を載置するステージの移動を、遠隔で制御可能な顕微鏡システムとして、例えば、図5に示すものが知られている。
図において、遠隔操作される一方側Aには、顕微鏡1が設置されている。
顕微鏡1には、標本3を走査するためのステージ5が取り付けられている。
【0003】
ステージ5には、ステージ5の水平移動および上下移動を制御するスキャニングステージコントローラ7が接続されている。
スキャニングステージコントローラ7および顕微鏡1の対物レンズ9等の可動部は、通信インタフェース11により画像伝送装置13aに接続されており、画像伝送装置13a側からの制御が可能にされている。
【0004】
顕微鏡1の上部には、標本3の観察像を撮像するカメラ15が取り付けられている。
画像伝送装置13aには、カメラ15により撮像される標本3の画像17を表示するモニタ19aが接続されている。
画像伝送装置13aには、標本3を観察するための種々の設定を行う操作手段21aが接続されている。
【0005】
一方、遠隔操作を行う他方側Bには、一方側Aの画像伝送装置13aと同種の画像伝送装置13bが設置されている。
画像伝送装置13aと画像伝送装置13bとは、例えば、通信回線23等により、相互に接続されている。
他方側Bの画像伝送装置13bには、一方側Aの画像伝送装置13aから伝送される標本3の画像17を表示するモニタ19bが接続されている。
【0006】
画像伝送装置13bには、標本3を観察するために遠隔操作に必要な種々の設定を行う操作手段21bが接続されている。
この操作手段21bでは、例えば、一方側Aに設置されている顕微鏡1のステージ5の走査,対物レンズ9の倍率の変更,撮像した画像17の伝送要求等が行われる。
【0007】
上述した顕微鏡システムは、例えば、医療現場において、患者を手術する場所と、患者の患部の状態を確認する場所とが離れている場合に使用されている。
具体的には、癌患者の手術の際に、離れた場所にいる専門の病理医等が、患部の癌細胞の状態を確認するために、顕微鏡1のステージ5上に載置される標本3を、遠隔操作で観察する場合に使用されている。
【0008】
ここで、標本3とは、患部の一部を薄く切断したものをスライドグラス3a上に載せたものである。
このような場合には、先ず、一方側Aで、手術される患者の患部から標本3が作成される。
作成された標本3は、検査員等により顕微鏡1のステージ5上に載置される。
【0009】
次に、検査員等は、操作手段21aを操作し、標本3の要部全体が観察できる程度の低い倍率に、対物レンズ9を切り替える。
そして、検査員等は、モニタ19a等を見ながら標本3の焦点を合わせる。
焦点が合わせられた標本3の画像17は、検査員等が操作手段21aを操作することにより、通信回線23を介して、静止画像として他方側Bの画像伝送装置13bに伝送される。
【0010】
画像伝送装置13bに伝送された画像17は、他方側Bのモニタ19bに表示される。
他方側Bでは、病理医等がモニタ19bに表示される画像17を観察する。
ここから先の顕微鏡1の操作は、病理医等の遠隔操作により行われ、標本3の画像17が詳細に観察される。
【0011】
病理医等は、詳細に観察したい標本3の位置および倍率等を操作手段21bから入力する。
操作手段21bにより入力された設定は、画像伝送装置13bを介して、一方側Aの画像伝送装置13aに伝えられる。
画像伝送装置13aは、画像伝送装置13bからの要求を受け、スキャニングステージコントローラ7および顕微鏡1を制御して、ステージ5を水平移動し、同時に指定された高倍率の対物レンズ9に切り替える。
【0012】
そして、カメラ15により拡大された画像17が撮像され、静止画像として画像伝送装置13b側に伝送される。
さらに、病理医等は、同様の操作を繰り返し、操作手段21bによりステージ5を水平移動し、標本3の複数の箇所を詳細に観察する。
このように、病理医等が顕微鏡1を遠隔操作することで、離れた場所で手術が行われても、患部の状態が詳細に観察され、病理医等の的確な指示のもとに、手術が行われる。
【0013】
【発明が解決しようとする課題】
しかしながら、このような従来の顕微鏡システムでは、観察する標本3のスライドグラス3aが、ステージ5に対して水平に載置されていない場合には、ステージ5を水平移動していくと、画像17の焦点がずれてしまうという問題があった。
【0014】
このような場合には、病理医等が、一方側Aにいる検査医等に焦点を合わせる依頼を行い、画像17を再度転送して、焦点が合ったことを確認しなくてはならず、病理医等が患部の状態について迅速に判断することができないという問題があった。
現実には、スライドグラス3aが傾いていると、観察位置を変更する都度、焦点がずれるため、病理医等は、見たい画像17を得るために、検査医等に対して何回も、焦点合わせを依頼しなければならなかった。
【0015】
本発明は、かかる従来の問題点を解決するためになされたもので、ステージ上に標本を傾いて載置した場合にも、焦点ずれを起こすことなく標本の観察を行うことができる顕微鏡システムを提供することを目的とする。
【0016】
【課題を解決するための手段】
顕微鏡システムは、標本を載置するステージの水平移動を制御する水平移動制御手段と、前記ステージの上下移動を制御する上下移動制御手段とを有する顕微鏡システムにおいて、前記ステージ上に載置される標本の任意の位置における水平座標(X,Y)および焦点位置である高さ座標Zからなる三次元座標(X,Y,Z)を読み込む座標読込手段と、前記座標読込手段により読み込まれる前記標本の少なくとも3箇所以上の三次元座標(Xn,Yn,Zn);(n=1,2,...)を記憶する記憶手段と、前記記憶手段に記憶された少なくとも3箇所以上の三次元座標(Xn,Yn,Zn);(n=1,2,...)と、前記標本の観察位置の水平座標(Xa,Ya)とから、前記観察位置の高さ座標Zaを算出する高さ座標算出手段と、前記水平座標(Xa,Ya)への前記ステージの移動を、前記水平移動制御手段に指示する水平移動指示手段と、前記高さ座標Zaへの前記ステージの移動を、前記上下移動制御手段に指示する上下移動指示手段とを有することを特徴とする。
【0017】
例えば、顕微鏡システムは、前記高さ座標算出手段は、同一直線上にない3個の前記水平座標(X1,Y1),(X2,Y2),(X3,Y3)および高さ座標Z1,Z2,Z3と、前記水平座標(Xa,Ya)とから、前記観察位置の高さ座標Zaを算出することを特徴とする。
【0018】
また、例えば、顕微鏡システムは、前記上下移動指示手段により指示を受け、前記上下移動制御手段により制御される前記ステージの上下移動は、前記水平移動指示手段の指示を受け、前記水平移動制御手段により制御される前記ステージの水平移動と、同時に行われることを特徴とする。
【0019】
さらに、顕微鏡システムは、前記上下移動制御手段は、前記上下移動指示手段の指示による前記ステージの移動の後に、さらに、自動焦点機能により、前記観察位置の焦点を合わせるための微調整が行われることを特徴とする。
【0020】
(作用)
請求項1の顕微鏡システムでは、ステージ上に載置される標本の3箇所以上の三次元座標(Xn,Yn,Zn)が、予め、座標読込手段により読み込まれ、記憶手段に記憶され、これ等三次元座標(Xn,Yn,Zn)から、ステージに載置される標本のステージに対する傾きが求められる。
【0021】
このため、標本の任意の観察位置での水平座標(Xa,Ya)を指定することで、標本を観察する前に、高さ座標算出手段により、水平座標(Xa,Ya)での焦点位置,すなわち観察位置での高さ座標Zaを求めることが可能になる。
そして、水平移動指示手段および上下移動指示手段が、水平移動制御手段および上下移動制御手段に、ステージの移動を指示し、指定された水平座標(Xa,Ya)および求められた高さ座標Zaまでステージが移動される。
【0022】
このため、標本の観察時に、観察位置での水平座標(Xa,Ya)にステージを移動した後に、従来必要であった焦点合わせを行う時間が不要になり、ステージを移動してから、実際に観察が行える状態になるまでの時間が短縮される。
また、標本を観察する前に、観察位置での水平座標(Xa,Ya)での高さ座標Zaが求まるため、例えば、従来、遠隔操作によりステージを移動する際に必要であった自動焦点機能が不要にされる。
【0023】
例えば、顕微鏡システムでは、ステージに載置される標本のステージに対する傾きが、標本上の同一直線上にない3個の水平座標(X1,Y1),(X2,Y2),(X3,Y3)および高さ座標Z1,Z2,Z3から求められるため、座標読込手段により読み込む三次元座標(Xn,Yn,Zn)の測定箇所が3箇所と最小限にされ、測定時間が短縮される。
【0024】
また、三次元座標(Xn,Yn,Zn)の記憶に必要な記憶手段の記憶容量が最小限になる。
なお、上下移動指示手段の指示によるステージの上下移動と、水平移動指示手段の指示によるステージの水平移動とが同時に行われる顕微鏡システムでは、水平移動制御手段による観察位置までのステージの水平移動の完了前に、上下移動制御手段により、焦点位置である高さ座標まで、ステージを上下移動することが可能になる。
【0025】
このため、観察位置での水平座標(Xa,Ya)を指定してから、実際に観察を行える状態になるまでの時間が短縮される。
また、顕微鏡システムでは、上下移動指示手段の指示によるステージの上下移動の後に、自動焦点機能により観察位置での焦点の微調整が行われるため、自動焦点機能の負荷が最小限にされ、自動焦点機能を備える顕微鏡システムでは、観察位置での焦点合わせの時間を短縮することが可能になる。
【0026】
【発明の実施の形態】
以下、本発明の実施形態を図面を用いて詳細に説明する。
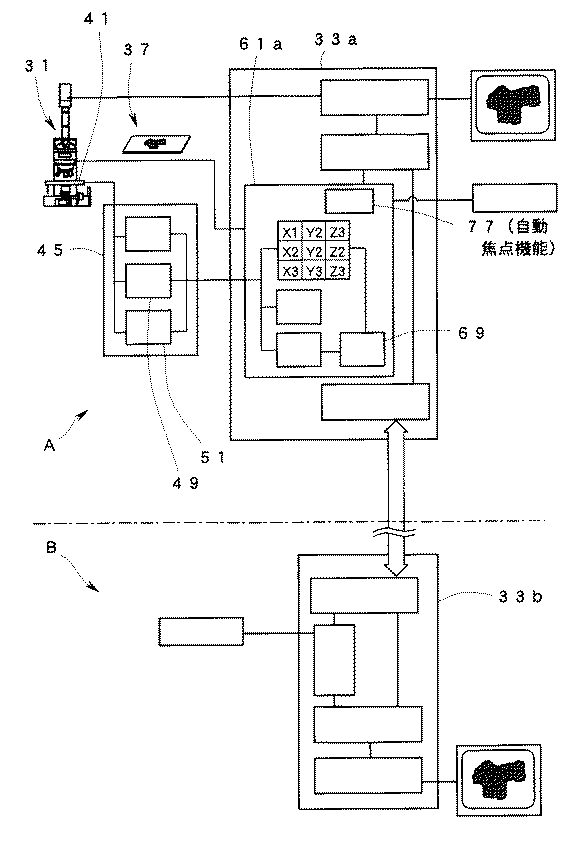
図1は、本発明の顕微鏡システムの第1の実施形態を示している。
図において、遠隔操作される一方側Aには、顕微鏡31,画像伝送装置33aおよびモニタ35aが設置されている。
【0027】
顕微鏡31の上部には、標本37の観察像を撮像するカメラ39が取り付けられている。
顕微鏡31には、標本37を走査するために、ステージ41が取り付けられている。
顕微鏡31は、標本37を様々な倍率で観察するための交換可能な複数の対物レンズ43を有している。
【0028】
顕微鏡31のステージ41と画像伝送装置33aとの間には、ステージ41の水平移動および上下移動を制御するスキャニングステージコントローラ45が配置されている。
スキャニングステージコントローラ45は、座標読込部47,水平移動制御部49および上下移動制御部51を有している。
【0029】
この実施形態では、座標読込部47,水平移動制御部49および上下移動制御部51は、座標読込手段,水平移動制御手段,上下移動制御手段の一形態として構成されている。
座標読込部47は、ステージ41の位置を、三次元座標(X,Y,Z)として読み込む機能を有している。
【0030】
水平移動制御部49は、画像伝送装置33aからの指示を受け、ステージ41を所定の水平座標(X,Y)までの移動する機能を有している。
上下移動制御部51は、画像伝送装置33aからの指示を受け、ステージ41を所定の高さ座標Zまでの移動する機能を有している。
【0031】
スキャニングステージコントローラ45および顕微鏡31の対物レンズ43等の可動部は、例えば、RS232CまたはGPIB等の通信インタフェース53により画像伝送装置33aに接続されており、画像伝送装置33a側から制御が可能にされている。
画像伝送装置33aには、標本37を観察するための種々の設定を行うために、例えば、キーボード等からなる操作手段55aが接続されている。
【0032】
画像伝送装置33aは、画像入出力部57a,画像メモリ59a,画像伝送部61aおよび制御部63aを有している。
画像入出力部57aは、カメラ39により撮像される標本37の観察像を画像65として取り込み、取り込んだ画像65をモニタ35aに表示する機能を有している。
【0033】
また、画像入出力部57aは、操作手段55aからの指示により、取り込んだ画像65を静止画像として画像メモリ59aに書き込む機能を有している。
画像伝送部61aは、画像メモリ59aから転送される画像65を、他方側Bに出力する機能、および、他方側Bからの各種設定を入力する機能を有している。
制御部63aは、ワークメモリ67,高さ座標算出手段69,水平移動指示手段71および上下移動指示手段73を有している。
【0034】
また、制御部63aは、顕微鏡システム全体の制御を行うために、図示しないマイクロコンピュータ等の中央制御回路を有している。
ワークメモリ67は、ステージ41上に載置される標本37の複数の位置を三次元座標(Xn,Yn,Zn)として記憶する。
この実施形態では、ワークメモリ67は、3箇所分の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)を記憶する記憶領域を有している。
【0035】
高さ座標算出手段69は、観察位置の水平座標(Xa,Ya)から、その観察位置での焦点位置、すなわちステージ41の高さ座標Zaを求める機能を有している。
この実施形態では、高さ座標算出手段69は、例えば、ソフトウエアのプログラムとして、画像伝送装置33a内に構成されている。
【0036】
水平移動指示手段71は、操作手段55aまたは操作手段55bにより指示される水平座標(X,Y)を受けて、その座標位置にステージ41を移動するため、スキャニングステージコントローラ45の水平移動制御部49に、水平座標(X,Y)を出力する機能を有している。
上下移動指示手段73は、操作手段55aまたは操作手段55bにより指示される高さ座標Zを受けて、その座標位置にステージ41を移動するため、スキャニングステージコントローラ45の上下移動制御部51に、高さ座標Zを出力する機能を有している。
【0037】
この実施形態では、水平移動指示手段71および上下移動指示手段73は、マイクロコンピュータに内蔵されるI/Oポート等により構成されている。
一方、遠隔操作を行う他方側Bには、画像伝送装置33bが設置されている。
画像伝送装置33aと画像伝送装置33bとは、例えば、電話回線等の通信回線75により、相互に接続されている。
【0038】
画像伝送装置33bは、画像入出力部57b,画像メモリ59b,画像伝送部61bおよび制御部63bを有している。
画像入出力部57bは、画像メモリ59bに記憶される画像65を取り込み、取り込んだ画像65をモニタ35bに表示する機能を有している。
画像伝送部61bは、画像伝送装置33bから伝送される画像65を入力して画像メモリ59bに転送する機能、および、各種設定を画像伝送装置33bに出力する機能を有している。
【0039】
制御部63bは、画像伝送装置33b全体を制御する機能を有している。
制御部63bには、標本37を観察するための種々の設定を行うために、例えば、キーボード等からなる操作手段55bが接続されている。
操作手段55bでは、例えば、一方側Aに設置されている顕微鏡31のステージ41の走査,対物レンズ43の倍率の変更,撮像した画像65の伝送要求等が行われる。
【0040】
上述した顕微鏡システムは、例えば、医療現場において、患者を手術する場所と、患者の患部の状態を確認する場所とが離れている場合に使用されている。
具体的には、癌患者の手術の際に、離れた場所にいる専門の病理医等が、患部の癌細胞の状態を確認する際に、顕微鏡31のステージ41上に載置される標本37を、遠隔操作を行うことで観察する場合に使用される。
【0041】
ここで、標本37とは、患部の一部を薄く切断したものをスライドグラス37a上に載せたものである。
このような場合には、先ず、一方側Aで、手術される患者の患部から標本37が作成される。
作成された標本37は、検査員等により顕微鏡31のステージ41上に載置される。
【0042】
次に、検査員等は、操作手段55aを操作し、標本37を観察するために利用する最大の倍率に、対物レンズ43を切り替える。
そして、図2に示すように、検査員等は、モニタ35a等を見ながら標本37のスライドグラス37a上の任意の3箇所(X1,Y1),(X2,Y2),(X3,Y3)について、それぞれ焦点を合わせる。
【0043】
この際に、検査員は、この後に求めるスライドグラス37aのステージ41に対する傾きが精度良く求まるように、任意の3箇所(X1,Y1),(X2,Y2),(X3,Y3)を頂点とする三角形の面積が大きくなるように、スライドグラス37a上の相互に離れた位置を3箇所指定する。
【0044】
また、スライドグラス37aは透明で、焦点を合わせることが難しいため、予め、測定する3箇所を決めておき、この位置に印を付けておいても良い。
そして、図1に示したように、検査員等が、各位置の焦点を合わせる毎に、操作手段55aを操作することにより、各位置の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)が、スキャニングステージコントローラ45の座標読込部47を介して、画像伝送装置33aのワークメモリ67に記憶される。
【0045】
画像伝送装置33aは、ワークメモリ67に記憶された3箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)から標本37のスライドグラス37aのステージ41に対する傾きを求める。
以下に、スライドグラス37aのステージ41に対する傾きを求めるための具体例を示す。
【0046】
式(1)は、定数C1,C2,C3を含む平面の式である。
【数1】
【数2】
【0047】
求めた定数C1,C2,C3を式(1)に適用することにより、3箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)を通る平面の式,すなわち、スライドグラス37aのステージ41に対する傾きが求められる。
【0048】
この後に、検査員等は、標本37の全体が観察できる位置に、ステージ41を移動し、焦点を合わせる。
焦点が合わせられた標本37の画像65は、検査員等が操作手段55aを操作することにより、画像入出力部57aを介して、静止画像として画像メモリ59aに取り込まれる。
【0049】
画像伝送装置33aは、画像メモリ59aに取り込まれた画像65を、画像伝送部61aに転送する。
画像伝送部61aは、転送された画像65を、通信回線75を介して、他方側Bの画像伝送装置33bの画像伝送部61bに伝送する。
画像伝送装置33bは、画像伝送部61bに伝送された画像65を、画像メモリ59bに転送する。
【0050】
そして、画像メモリ59bに転送された画像65は、画像入出力部57bにより読み込まれ、モニタ35bに表示される。
病理医等は、モニタ35bに表示される画像65を観察する。
ここからの顕微鏡31の操作は、病理医等の遠隔操作により行われ、標本37の画像65が詳細に観察される。
【0051】
病理医等は、標本37を詳細に観察したい位置および倍率等を操作手段55bから入力する。
病理医等が入力した観察位置は、図2に示したように、画像伝送装置33bの制御部63bで、水平座標(Xa,Ya)に変換される。
観察位置の水平座標(Xa,Ya)および倍率は、画像伝送装置33bを介して、一方側Aの画像伝送装置33aに伝えられる。
【0052】
画像伝送装置33aの制御部63aは、高さ座標算出手段69により、指示された観察位置の水平座標(Xa,Ya)と、前述した平面の式(1)とから、観察位置の高さ座標Zaを求める。
次に、水平移動指示手段71は、水平移動制御部49に観察位置の水平座標(Xa,Ya)へのステージ41の移動を指示する。
【0053】
同時に、上下移動指示手段73は、上下移動制御部51に観察位置の高さ座標Zaへのステージ41の移動を指示する。
水平移動制御部49および上下移動制御部51は、水平移動指示手段71および上下移動指示手段73の指示を受け、ステージ41を所定の位置に移動し、観察位置の水平座標(Xa,Ya)への移動と焦点位置である高さ座標Zaへの移動が同時に行われる。
【0054】
また、制御部63aは、通信インタフェース53を介して、顕微鏡31を制御し、顕微鏡31の対物レンズ43を高倍率のものに切り替える。
この後に、カメラ39により撮像される観察位置の拡大された画像65が、画像入出力部57aを介して画像メモリ59aに取り込まれる。
そして、制御部63aは、画像メモリ59aの画像データを、画像伝送部61aに転送し、画像65が他方側Bの画像伝送装置33bに伝送される。
【0055】
画像伝送装置33bの制御部63bは、画像65を画像メモリ59bに取り込み、取り込んだ画像65を、画像入出力部57bに出力する。
画像入出力部57bは、画像65をモニタ35bに出力する。
病理医等は、モニタ35bに表示される拡大された画像65を観察し、次に、観察したい観察位置の水平座標(Xa,Ya)を、操作手段55bにより、画像伝送装置33bに入力する。
【0056】
そして、画像伝送装置33aにより、観察位置での高さ座標Zaの算出が行われ、人手等で焦点を合わせることなく、ステージ41が焦点位置に移動し、次の観察位置での画像65が、他方側Bのモニタ35bに表示される。
【0057】
以上のように構成された顕微鏡システムでは、ステージ41上に載置される標本37の3箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)を、予め、座標読込部47により読み込み、ワークメモリ67に記憶したので、これ等三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3)から、ステージ41に載置される標本37のステージ41に対する傾きを求めることができる。
【0058】
このため、標本37の任意の観察位置での水平座標(Xa,Ya)を指定することで、標本37を観察する前に、高さ座標算出手段69により、水平座標(Xa,Ya)での焦点位置,すなわち観察位置での高さ座標Zaを求めることができる。
さらに、標本37の観察時に、観察位置での水平座標(Xa,Ya)にステージ41を移動した後に、焦点合わせを行う時間が不要になり、ステージ41を移動してから、実際に観察が行える状態になるまでの時間を短縮することができる。
【0059】
また、標本37を観察する前に、観察位置での水平座標(Xa,Ya)での高さ座標Zaを求めることができるため、例えば、従来、遠隔操作によりステージ41を観察位置での水平座標(Xa,Ya)まで移動を行う場合に必要であった自動焦点機能を不要にすることができる。
そして、ステージ41に載置される標本37のステージ41に対する傾きを、標本37上の同一直線上にない3個の水平座標(X1,Y1),(X2,Y2),(X3,Y3)および高さ座標Z1,Z2,Z3から求めたので、観察前に座標読込部47による読み込まれる三次元座標(Xn,Yn,Zn)の測定箇所を3箇所と最小限にすることができ、測定時間を短縮でき、また、ワークメモリ67の記憶容量を最小限にすることができる。
【0060】
さらに、上下移動指示手段73の指示によるステージ41の上下移動と、水平移動指示手段71の指示によるステージ41の水平移動とを同時に行ったので、水平移動制御部49による観察位置までのステージ41の水平移動の完了前に、上下移動制御部51により、焦点位置である高さ座標まで、ステージ41を上下移動することができ、観察位置での水平座標(Xa,Ya)を指定してから、実際に観察が行える状態になるまでの時間を短縮することができる。
【0061】
図3は、本発明の顕微鏡システムの第2の実施形態を示している。
この実施形態では、一方側Aの画像伝送装置33aのワークメモリ67は、4箇所以上の三次元座標を記憶できる記憶領域を有している。
この実施形態では、病理医等による標本37の観察前に検査員等が、顕微鏡31のステージ41上に載置される標本37のスライドグラス37a上の任意の4箇所について、焦点を合わせる。
【0062】
検査員等が、各位置の焦点を合わせる毎に、操作手段55aを操作することにより、各位置の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),(X4,Y4,Z4)が、スキャニングステージコントローラ45の座標読込部47を介して、画像伝送装置33aのワークメモリ67に記憶される。
【0063】
画像伝送装置33aは、ワークメモリ67に記憶された3箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),(X4,Y4,Z4)から標本37のスライドグラス37aのステージ41に対する傾きを求める。
以下に、スライドグラス37aのステージ41に対する傾きを求めるための具体例を示す。
【0064】
式(3)は、上述した第1の実施形態の式(1)を4箇所の位置座標について表したものを、行列式として纏めたものである。
【数3】
【数4】
求めた定数C1,C2,C3を式(1)に適用することにより、4箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),(X4,Y4,Z4)の各座標に最も近い平面の式が求められる。
【0065】
この後に、検査員等は、標本37の全体が観察できる位置に、ステージ41を移動し、焦点を合わせる。
焦点が合わせられた標本37の画像65は、検査員等が操作手段55aを操作することにより、静止画像として他方側Bの画像伝送装置33bに伝送され、画像65がモニタ35bに表示される。
【0066】
この後に、上述した第1の実施形態と同様にして、他方側Bにいる病理医等により、遠隔操作で画像65の観察が行われる。
この実施形態の顕微鏡システムにおいても、上述した第1の実施形態と同様の効果を得ることができるが、この実施形態では、予め、標本37の4箇所を測定し、4箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),(X4,Y4,Z4)の各座標に最も近い平面の式を求めたので、例えば、スライドグラス37aの測定箇所に異物等の凹凸がある場合にも、この凹凸の影響を最小限にして、平面の式を求めることができる。
【0067】
図4は、本発明の顕微鏡システムの第3の実施形態を示している。
この実施形態では、画像伝送装置33aに自動焦点機能77が搭載されている。
【0068】
この実施形態では、高さ座標算出手段69により、他方側Bから指示される観察位置の水平座標(Xa,Ya)から、高さ座標Zaが求められ、水平移動制御部49および上下移動制御部51により、観察位置にステージ41が移動した後に、さらに、自動焦点機能77により、焦点の微調整が行われる。
このため、ステージ41を観察位置に移動した後の自動焦点機能77によるステージ41の上下移動は極小さく、短時間で行われる。
【0069】
また、病理医による標本37の観察前に、検査員等が行う複数箇所の三次元座標の測定も自動焦点機能77を利用して行われる。
この実施形態においても、上述した第1の実施形態を同様の効果を得ることができるが、この実施形態では、上下移動指示手段73の指示によるステージ41の上下移動の後に、自動焦点機能77により観察位置での焦点の微調整を行ったので、自動焦点機能77の負荷を最小限にすることができ、自動焦点機能77を備える顕微鏡システムでは、観察位置での焦点合わせの時間を短縮することができる。
【0070】
なお、上述した第1の実施形態では、三次元座標(Xn,Yn,Zn)を測定した後に、検査員等が、全体を観察できる位置にステージ41を移動して、焦点合わせを行った例について述べたが、本発明はかかる実施形態に限定されるものではなく、例えば、三次元座標(Xn,Yn,Zn)を測定した後には、標本37のスライドグラス37aのステージ41に対する傾きが、平面の式として求められているため、検査員等が観察位置での水平座標(Xa,Ya)を入力した後に、高さ座標算出手段69により、焦点位置であるステージ41の高さ座標を求め、ステージ41を制御部63aの制御により移動しても良い。
【0071】
また、上述した第2の実施形態では、4箇所の三次元座標(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),(X4,Y4,Z4)から平面の式を求めた例について述べたが、本発明はかかる実施形態に限定されるものではなく、例えば、式(3)および式(4)を応用して、5箇所以上の三次元座標(Xn,Yn,Zn);(n=1,2,...)から平面の式を求めても良く、この場合には、より高い精度で、標本37のスライドグラス37aのステージ41に対する傾きを求めることができる。
【0072】
【発明の効果】
本発明の顕微鏡システムでは、ステージ上に載置される標本の3箇所以上の三次元座標(Xn,Yn,Zn)を、予め、座標読込手段により読み込み、記憶手段に記憶したので、これ等三次元座標(Xn,Yn,Zn)から、ステージに載置される標本のステージに対する傾きを求めることができる。
【0073】
このため、標本の任意の観察位置での水平座標(Xa,Ya)を指定することで、標本を観察する前に、高さ座標算出手段により、水平座標(Xa,Ya)での焦点位置,すなわち観察位置での高さ座標Zaを求めることができる。
さらに、標本の観察時に、観察位置での水平座標(Xa,Ya)にステージを移動した後に、焦点合わせを行う時間が不要になり、ステージを移動してから、実際に観察が行える状態になるまでの時間を短縮することができる。
【0074】
また、標本を観察する前に、観察位置での水平座標(Xa,Ya)での高さ座標Zaを求めることができるため、例えば、従来、遠隔操作によりステージを観察位置での水平座標(Xa,Ya)まで移動を行う場合に必要であった自動焦点機能を不要にすることができる。
例えば、本発明の顕微鏡システムでは、ステージに載置される標本のステージに対する傾きを、標本上の同一直線上にない3個の水平座標(X1,Y1),(X2,Y2),(X3,Y3)および高さ座標Z1,Z2,Z3から求めたので、座標読込手段により読み込む三次元座標(Xn,Yn,Zn)の測定箇所を3箇所と最小限にすることができ、測定時間を短縮することができる。
【0075】
また、三次元座標(Xn,Yn,Zn)の記憶に必要な記憶手段の記憶容量を最小限にすることができる。
さらに、例えば、本発明の別の顕微鏡システムでは、上下移動指示手段の指示によるステージの上下移動と、水平移動指示手段の指示によるステージの水平移動とを同時に行ったので、水平移動制御手段による観察位置までのステージの水平移動の完了前に、上下移動制御手段により、焦点位置である高さ座標まで、ステージを上下移動することができ、観察位置での水平座標(Xa,Ya)を指定してから、実際に観察が行える状態になるまでの時間を短縮することができる。
【0076】
なお、本発明の顕微鏡システムでは、上下移動指示手段の指示によるステージの上下移動の後に、自動焦点機能により観察位置での焦点の微調整を行ったので、自動焦点機能の負荷を最小限にすることができ、自動焦点機能を備える顕微鏡システムでは、観察位置での焦点合わせの時間を短縮することができる。
【図面の簡単な説明】
【図1】本発明の顕微鏡システムの第1の実施形態を示す説明図である。
【図2】標本のスライドグラスの測定位置の詳細を示す説明図である。
【図3】本発明の顕微鏡システムの第2の実施形態を示す説明図である。
【図4】本発明の顕微鏡システムの第3の実施形態を示す説明図である。
【図5】従来の顕微鏡システムを示す説明図である。
【符号の説明】
37 標本
41 ステージ(ステージ)
47 座標読込部(座標読込手段)
49 水平移動制御部(水平移動制御手段)
51 上下移動制御部(上下移動制御手段)
67 ワークメモリ(記憶手段)
69 高さ座標算出手段
71 水平移動指示手段
73 上下移動指示手段
77 自動焦点機能
Claims (1)
- 標本を載置するステージの水平移動を制御する水平移動制御手段と、
前記ステージの上下移動を制御する上下移動制御手段と、
を有する顕微鏡システムにおいて、
前記ステージ上に載置される標本の任意の位置における水平座標(X,Y)および焦点位置である高さ座標Zからなる三次元座標(X,Y,Z)を読み込む座標読込手段と、
前記座標読込手段により読み込まれる前記標本の少なくとも3箇所以上の三次元座標(Xn,Yn,Zn);(n=1,2,...)を記憶する記憶手段と、
前記記憶手段に記憶された少なくとも3箇所以上の三次元座標(Xn,Yn,Zn);(n=1,2,...)と、前記標本の観察位置の水平座標(Xa,Ya)とから、前記観察位置の高さ座標Zaを算出する高さ座標算出手段と、
前記水平座標(Xa,Ya)への前記ステージの移動を、前記水平移動制御手段に指示する水平移動指示手段と、
前記高さ座標Zaへの前記ステージの移動を、前記上下移動制御手段に指示する上下移動指示手段とを有し、
前記水平移動指示手段および前記上下移動指示手段の指示による前記ステージの移動の後に、さらに、前記上下移動制御手段は、自動焦点機能により、前記観察位置の焦点を合わせるための微調整が行われることを特徴とする顕微鏡システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02993398A JP4332905B2 (ja) | 1998-02-12 | 1998-02-12 | 顕微鏡システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02993398A JP4332905B2 (ja) | 1998-02-12 | 1998-02-12 | 顕微鏡システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11231228A JPH11231228A (ja) | 1999-08-27 |
| JP4332905B2 true JP4332905B2 (ja) | 2009-09-16 |
Family
ID=12289797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02993398A Expired - Lifetime JP4332905B2 (ja) | 1998-02-12 | 1998-02-12 | 顕微鏡システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4332905B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013015143A1 (en) * | 2011-07-25 | 2013-01-31 | Canon Kabushiki Kaisha | Image pickup apparatus |
| US20160011409A1 (en) * | 2013-03-13 | 2016-01-14 | Sony Corporation | Information processing apparatus, information processing method, and information processing program |
| WO2019003536A1 (ja) * | 2017-06-27 | 2019-01-03 | 株式会社オプティマ | 観察システム、制御装置、制御方法、及びプログラム |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW558629B (en) * | 2001-09-19 | 2003-10-21 | Siemens Ag | Device and method to plain-parallel alignment of an inspectable even object-surface to a focus-plain of an objective |
| KR100438212B1 (ko) * | 2002-08-09 | 2004-07-01 | 학교법인고려중앙학원 | 전자현미경을 사용해서 물체의 3차원 공간 데이터를추출하는 방법 및 그 장치 |
| US7199712B2 (en) * | 2004-06-17 | 2007-04-03 | Tafas Triantafyllos P | System for automatically locating and manipulating positions on an object |
| JP4877588B2 (ja) * | 2006-08-15 | 2012-02-15 | 横河電機株式会社 | 合焦補正方法 |
| US8878923B2 (en) * | 2007-08-23 | 2014-11-04 | General Electric Company | System and method for enhanced predictive autofocusing |
| JP4974060B2 (ja) * | 2008-02-19 | 2012-07-11 | 横河電機株式会社 | 創薬スクリーニング方法 |
| US8895923B2 (en) * | 2012-11-20 | 2014-11-25 | Dcg Systems, Inc. | System and method for non-contact microscopy for three-dimensional pre-characterization of a sample for fast and non-destructive on sample navigation during nanoprobing |
| CN103955051B (zh) * | 2014-05-12 | 2017-02-01 | 广州博隆兴中信息科技有限公司 | 一种面向活体组织的实时自动对焦显微成像装置和方法 |
| JP6560523B2 (ja) | 2015-04-08 | 2019-08-14 | キヤノン株式会社 | ステージ装置および顕微鏡 |
| WO2016163122A1 (en) | 2015-04-08 | 2016-10-13 | Canon Kabushiki Kaisha | Stage apparatus and microscope |
| KR102523559B1 (ko) * | 2017-09-29 | 2023-04-19 | 라이카 바이오시스템즈 이미징 인크. | 디지털 스캐닝 장치 |
| CN113302539B (zh) | 2019-01-18 | 2023-11-17 | 泰克赛特有限公司 | 用于改善显微成像的方法 |
-
1998
- 1998-02-12 JP JP02993398A patent/JP4332905B2/ja not_active Expired - Lifetime
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013015143A1 (en) * | 2011-07-25 | 2013-01-31 | Canon Kabushiki Kaisha | Image pickup apparatus |
| JP2013025251A (ja) * | 2011-07-25 | 2013-02-04 | Canon Inc | 撮像装置 |
| US20160011409A1 (en) * | 2013-03-13 | 2016-01-14 | Sony Corporation | Information processing apparatus, information processing method, and information processing program |
| US10678041B2 (en) * | 2013-03-13 | 2020-06-09 | Sony Corporation | Information processing apparatus, information processing method, and information processing program |
| US11320642B2 (en) | 2013-03-13 | 2022-05-03 | Sony Corporation | Information processing apparatus, information processing method, and information processing program |
| WO2019003536A1 (ja) * | 2017-06-27 | 2019-01-03 | 株式会社オプティマ | 観察システム、制御装置、制御方法、及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11231228A (ja) | 1999-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4332905B2 (ja) | 顕微鏡システム | |
| JP4923541B2 (ja) | 顕微鏡 | |
| US7978898B2 (en) | Image acquiring apparatus, image acquiring method, and image acquiring program | |
| JP4878913B2 (ja) | 顕微鏡システム、顕微鏡画像の合成方法、及びプログラム | |
| JP5555014B2 (ja) | バーチャルスライド作成装置 | |
| US20140313312A1 (en) | Digital microscope and method for optimizing the work process in a digital microscope | |
| US9885858B2 (en) | Surgical microscopy system and method for operating the same | |
| JP2009515151A (ja) | サンプル操作デバイス | |
| CN106886087B (zh) | 手术用立体观察装置 | |
| JP2001059940A (ja) | 顕微鏡及び記録媒体 | |
| JP2010112969A (ja) | 共焦点顕微鏡 | |
| JP2008083601A (ja) | 共焦点顕微鏡、共焦点顕微鏡操作方法、共焦点顕微鏡操作プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器 | |
| KR20010092741A (ko) | 현미경화상관찰시스템, 그 제어방법 및 제어프로그램을기록한 컴퓨터에 판독 가능한 기록매체 | |
| JP7134839B2 (ja) | 顕微鏡装置、制御方法、及び、プログラム | |
| KR100897674B1 (ko) | 표본 검사 시스템 및 표본 검사 방법 | |
| JP2010054704A (ja) | 観察装置及びその制御装置並びにプログラム | |
| JPS62130305A (ja) | 画像処理式測定装置 | |
| JP4979464B2 (ja) | 顕微鏡装置、該制御プログラム、及び該制御方法 | |
| JP2010266750A (ja) | 観察装置および観察システム | |
| JP6641177B2 (ja) | 顕微鏡システム、顕微鏡システムの制御方法およびプログラム | |
| JP2006153636A (ja) | 3次元計測方法および3次元計測方法をコンピュータに実行させるプログラム | |
| JP4231915B2 (ja) | 標本検査方法及びシステム | |
| JP2010256724A (ja) | 観察装置 | |
| JP2022066928A (ja) | 座標リンケージシステム及び座標リンケージ方法 | |
| KR20140130759A (ko) | 렌즈의 배열 방법 및 이를 탑재한 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080507 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090602 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150703 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150703 Year of fee payment: 6 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150703 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |