JP4186458B2 - 放送方法及び受信装置 - Google Patents
放送方法及び受信装置 Download PDFInfo
- Publication number
- JP4186458B2 JP4186458B2 JP2001369450A JP2001369450A JP4186458B2 JP 4186458 B2 JP4186458 B2 JP 4186458B2 JP 2001369450 A JP2001369450 A JP 2001369450A JP 2001369450 A JP2001369450 A JP 2001369450A JP 4186458 B2 JP4186458 B2 JP 4186458B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- information
- motion
- unit
- leg
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Television Systems (AREA)
- Two-Way Televisions, Distribution Of Moving Picture Or The Like (AREA)
Description
【発明の属する技術分野】
本発明は、放送網を通じて映像、及びデータを提供する放送方法、及びデータ放送と映像を処理可能なPC、セットトップボックス、インテリジェント・テレビ、デジタル放送受信機等の放送受信装置に関し、特に通信機能を持つ家庭用ロボットの動作配信技術に関する。
【0002】
【従来の技術】
従来のテレビジョンなどの放送方式では、視聴者は、番組として定められた映像・音響情報のみしか視聴できない。
一方、特願平10−352254号公報記載の「放送方法及び受信装置」では、背景映像と共に番組に出演するキャラクタの動作情報を配信し、受信機でキャラクタを生成することにより、視聴者が選択したキャラクタが出演する映像・音響情報の視聴が可能になる技術が開示されている。
【0003】
【発明が解決しようとする課題】
上記の特願平10−352254号公報記載の技術では、映像・音響情報のみから成る番組の視聴が出来るのみであり、視聴者は、キャラクタを選択できるという利点はあるものの、視聴形式としては、従来の形式と変化がなかった。
本発明は、リアルタイム放送や、放送の蓄積後再生において、視聴者が所有するロボットと放送される番組が対話したり、協調したりする映像・音響情報のみではない番組を視聴可能とするための手段を提供する。
【0004】
【課題を解決するための手段】
上記の課題を解決するためには、例えば特許請求の範囲に記載されるように構成すればよい。
これにより、リアルタイム放送や、放送の蓄積後再生において、ロボットと放送される番組が対話したり、協調したりする、映像・
音響情報のみではない番組が実現できる。
【0005】
【発明の実施の形態】
以下では、本発明の実施例を、図面を用いて詳細に説明する。
最初に、本発明の概要を、図1を用いて説明する。
放送局101は、映像情報102と共に、ロボットの動作情報103を配信する。この配信方式については、テレビジョン放送や有線によるブロードキャスト配信、DVD等のメディア配布などで実現され、特定の配布方式に依存しない。受信機104は、受信した映像情報をテレビ等の映像表示装置106に出力すると共に、映像と同期して、ロボット105に対して動作指令107を配信する。なお、本実施例では、映像情報102は、MPEG-2等にエンコードされ、デジタル放送として配信されることを想定する。また、動作情報102は、リアルタイム放送の場合は映像情報を同時若しくは映像情報が配信されるより前に、また、蓄積後再生の場合は映像情報が配信された後に、データ放送として配信されることを想定する。また、受信機104とロボット105の間は、無線、赤外線、または有線等による通信手段で接続されており、該ロボット105は該通信手段の受信機能と該通信手段を用いて配信される動作指令107に従って動作する機能を持つ。「動作」に関する詳細は後述する。
次に、受信機104の構成を、図2を用いて説明する。受信機は、映像情報102並びに動作情報103を受信するためのチューナ201、受信された動作情報103に含まれる動作指令107を該動作情報103に含まれる同期情報に従ってロボット105へ配信する動作指令出力装置202、受信された映像情報をデコードし、テレビ等の映像出力装置106へ出力する映像出力装置203、映像情報のデコードや動作指令の出力等の処理を行うプロセッサ204、該プロセッサが行う処理プログラムや、オプションで受信された動作情報や映像情報を蓄積するデータ蓄積装置205から構成される。ここで、動作指令出力装置202としては、受信機104とロボット105が無線接続の場合、無線LANカード等の無線送信装置、赤外線接続の場合には赤外線コントローラ等が考えられる。また、データ蓄積装置205としては、プロセッサ204が処理を行うプログラムが蓄積されたROMやハードディスク、処理途中のデータを一時的に蓄積するためのメモリ、動作情報や映像情報を蓄積するためのハードディスクやDVD−RAM等が考えられる。
次に、動作情報103並びに動作指令107を、図3並びに図4を用いて説明する。
図4は動作情報103の例である。動作情報は、動作指令をロボットへ配信するタイミングを表わす同期情報410、動作指令の種類を表わすコマンド411、コマンドに伴うデータのバイト数を表わすデータ長412、データ413から構成される。ここで、同期情報410は映像情報のフレーム番号である。また、コマンドは、ロボットの動作する部分を表わす番号で、図3のロボットでは、「1」が右眼301の、「2」が左眼302の光の点滅を、「3」が口303の発声を、「4」が右腕304の、「5」が左腕305の、「6」が右脚306の、「7」が左脚307の回転をそれぞれ表わす。
また、データは、コマンドが「1」若しくは「2」の場合には「1」が点灯、「0」が消灯、コマンドが「3」の場合には発声音響データ420、コマンドが「4」〜「7」の場合には回転角を表わす。なお、動作指令107は図4の動作情報から同期情報410を除いたデータである。
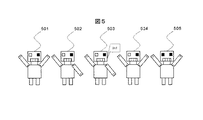
ここで、図4のような情報が配信された場合のロボット105の動きを、図5を用いて説明する。まず動作情報401にて、映像の1234フレーム目を表示すると同時に、右眼を点灯する(501)。次に動作情報402にて、1962フレーム目を表示すると同時に、左腕を−60度回転させる(502)。次に動作情報403にて、1997フレーム目を表示すると同時に、データとして付属している8000バイトの音響を発生し始める(503)。次に動作情報404にて、2001フレーム目を表示すると同時に、左腕を+60度回転させる(504)。次に動作情報405にて、2010フレーム目を表示すると同時に、右眼を消灯する(505)。
次に、本実施例において、受信機のプロセッサ204が本発明を実現するために行う処理手順を、図6と図1、図2及び図4を用いて説明する。まず、放送局101から配信された、または配信され、チューナ201より入力され、予めデータ蓄積装置205に記録された動作情報103を1レコード(例えば401)入力し、その同期情報(410)を変数Fに代入する(ステップ601)。次に、動作情報と同様に入力した映像情報を1フレームデコードし、映像出力装置203を通じてテレビ等106へ出力する(ステップ602)。次に、ステップ602でデコードしたフレームのフレーム番号がF以上かどうかを判定し(ステップ604)、F以上ならば入力された当該動作情報の動作指令(107、411、412、413)を、動作指令出力装置202を通じてロボット105に出力する(ステップ605)。次に、ステップ601と同様に動作情報を1レコード入力し、同期情報をFに代入する(ステップ606)。ステップ604において該フレーム番号がF以上でない、またはステップ606の処理を行った後に映像が終了ならば、処理を終了する(ステップ603)。そうでないならばステップ602へ戻る。
【0006】
【発明の効果】
本発明によれば、リアルタイム放送や、放送の蓄積後再生において、放送または再生される番組がロボットと対話したり、協調したりする、映像・音響情報のみではない番組が実現できる。
【図面の簡単な説明】
【図1】本発明の概要を表わす図である。
【図2】本発明における受信機の構成を表わす図である。
【図3】本発明におけるロボットの例を表わす図である。
【図4】本発明における動作情報の例を表わす図である。
【図5】図4に従ったロボットの動作の例を表わす図である。
【図6】本発明における受信機の処理例を表わすフローチャートである。
【符号の説明】
101…放送局、102…映像情報、103、401〜405…動作情報、104…受信機、105、501〜505…ロボット、106…テレビ、107…動作指令、201…チューナ、202…動作指令出力装置、203…映像出力装置、204…プロセッサ、205…データ蓄積装置、410…同期情報、411…コマンド、412…データ長、413…データ、420…音響データ。
Claims (7)
- 受信装置で表示出力するための番組映像情報と、前記番組映像情報と同期するための同期情報を含むロボットの動作情報を配信し、
前記動作情報には、前記ロボットが有する動作部の動作の種類を示す情報と、該ロボットが有する動作部の動作の種類により必要となるデータと、前記同期情報とが、それぞれ対応づけられて含まれており、前記ロボットが有する動作部の動作の種類が、前記ロボットが有する音声発生部における音声の発声であることを示す前記ロボットの動作の種類を表す情報と前記ロボットが出力する音声データが対応づけられて含まれることを特徴とする放送方法。 - 前記ロボットが有する動作部の動作の種類の少なくとも一つは、前記ロボットが有する腕部もしくは脚部の回転動作であることを特徴とする請求項1記載の放送方法。
- 前記ロボットが有する動作部の動作の種類により必要となるデータの少なくとも一つが、前記ロボットが有する腕部もしくは脚部の回転動作の回転角であることを特徴とする請求項2記載の放送方法。
- 番組映像情報と前記番組映像情報と同期するための同期情報を含むロボットの動作情報であって、前記ロボットが有する動作部の動作の種類を示す情報と、該ロボットが有する動作部の動作の種類により必要となるデータと、前記同期情報とが、それぞれ対応づけられて含まれており、前記ロボットが有する動作部の動作の種類が、前記ロボットが有する音声発生部における音声の発声であることを示す前記ロボットの動作の種類を表す情報と前記ロボットが出力する音声データが対応づけられて含まれている情報とを受信する受信部と、
前記番組映像情報を表示手段に出力する第1の出力部と、
前記動作情報に従って、前記ロボットが有する動作部の動作を決定づける動作指示を前記ロボットに対して出力する第2の出力部とを有し、
前記動作情報において前記ロボットが有する音声発生部における音声の発声の動作を示す情報と対応付けられた同期情報が示すタイミングに前記第2の出力部から出力する動作指示に、前記ロボットが出力する音声データが含まれることを特徴とする受信装置。 - 前記ロボットの動作指示を、前記番組映像情報の再生処理と同期して出力することを特徴とする請求項4記載の受信装置。
- 前記動作情報に前記ロボットが有する腕部もしくは脚部の回転動作を示す情報が含まれる場合に、
前記動作指示に前記ロボットが有する腕部もしくは脚部の回転動作の指示が含まれることを特徴とする請求項4記載の受信装置。 - 前記動作情報に前記ロボットが有する腕部もしくは脚部の回転動作を示す情報が含まれ、前記ロボットが有する腕部もしくは脚部の回転動作に必要となるデータとして前記ロボットが有する腕部もしくは脚部の回転動作の回転角が含まれる場合に、
前記動作指示に前記ロボットが有する動作部の動作に対応するデータが含まれ、前記データの少なくとも一つが、前記ロボットが有する腕部もしくは脚部の回転動作の回転角であることを特徴とする請求項6記載の受信装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001369450A JP4186458B2 (ja) | 2001-12-04 | 2001-12-04 | 放送方法及び受信装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001369450A JP4186458B2 (ja) | 2001-12-04 | 2001-12-04 | 放送方法及び受信装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003169305A JP2003169305A (ja) | 2003-06-13 |
| JP2003169305A5 JP2003169305A5 (ja) | 2005-05-12 |
| JP4186458B2 true JP4186458B2 (ja) | 2008-11-26 |
Family
ID=19178837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001369450A Expired - Fee Related JP4186458B2 (ja) | 2001-12-04 | 2001-12-04 | 放送方法及び受信装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4186458B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015046708A (ja) * | 2013-08-27 | 2015-03-12 | 日本電信電話株式会社 | 通信システム、通信方法、送信側同期信号配信装置、送信側同期制御装置、受信側同期信号配信装置、受信側同期制御装置及びプログラム |
| JP6351987B2 (ja) * | 2014-01-31 | 2018-07-04 | シャープ株式会社 | 発話制御装置、発話装置、発話制御システム、発話制御方法、発話装置の制御方法、および制御プログラム |
-
2001
- 2001-12-04 JP JP2001369450A patent/JP4186458B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003169305A (ja) | 2003-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10462530B2 (en) | Systems and methods for providing a multi-perspective video display | |
| JP3838035B2 (ja) | 放送方法及び放送受信装置 | |
| JP2008523738A (ja) | 高解像度画像フレームバッファ及び低解像度画像フレームバッファを有するメディアプレーヤ | |
| TW200830874A (en) | Image information transmission system, image information transmitting apparatus, image information receiving apparatus, image information transmission method, image information transmitting method, and image information receiving method | |
| US8447824B2 (en) | Environment information providing method, video apparatus and video system using the same | |
| JP5707642B2 (ja) | オーディオ信号及びビデオ信号の同期化誤差の補正方法及び装置 | |
| JP4612791B2 (ja) | 受信装置及び受信方法 | |
| US9451328B1 (en) | Methods and systems for variable speed playback with bi-directionality | |
| JP4186458B2 (ja) | 放送方法及び受信装置 | |
| JP4178631B2 (ja) | 受信装置および方法、送信装置 | |
| JP2007013358A (ja) | デジタル放送受信装置 | |
| US20210195256A1 (en) | Decoder equipment with two audio links | |
| JP4823960B2 (ja) | 再生制御方法および受信装置 | |
| JP5404338B2 (ja) | コンテンツ再生装置及びその制御方法 | |
| JP2002142165A (ja) | デジタルtv送受信システムにおける映像のプレイバック方式 | |
| JP2007150787A (ja) | 映像・音声機器に対する再生コンテンツ切替システム | |
| JP2008131341A (ja) | 映像音声再生システムと映像再生装置 | |
| JP2005123947A (ja) | 受信装置 | |
| US20110110641A1 (en) | Method for real-sense broadcasting service using device cooperation, production apparatus and play apparatus for real-sense broadcasting content thereof | |
| JP4403667B2 (ja) | ネットワーク利用時の番組出力方法及びネットワーク接続機能を有した受信装置 | |
| JP4994942B2 (ja) | 情報処理装置、情報処理方法及び情報処理システム | |
| JP2010141581A (ja) | 映像表示装置、映像表示方法及びプログラム | |
| JP4363364B2 (ja) | 受信装置及び受信方法 | |
| JP2010245756A (ja) | 通信ネットワークシステム、コンテンツ再生方法、及びサーバ | |
| JP4028975B2 (ja) | 映像受信処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040630 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040630 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20060419 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061128 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080819 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080901 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |