JP4144981B2 - 立体画像表示装置 - Google Patents
立体画像表示装置 Download PDFInfo
- Publication number
- JP4144981B2 JP4144981B2 JP27306899A JP27306899A JP4144981B2 JP 4144981 B2 JP4144981 B2 JP 4144981B2 JP 27306899 A JP27306899 A JP 27306899A JP 27306899 A JP27306899 A JP 27306899A JP 4144981 B2 JP4144981 B2 JP 4144981B2
- Authority
- JP
- Japan
- Prior art keywords
- orientation
- image
- visual field
- eye
- image display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 40
- 238000003384 imaging method Methods 0.000 claims description 22
- 230000000007 visual effect Effects 0.000 description 64
- 238000004364 calculation method Methods 0.000 description 10
- 238000013500 data storage Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 210000003128 head Anatomy 0.000 description 7
- 238000000034 method Methods 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000004886 head movement Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images




Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Description
【発明の属する技術分野】
本発明は立体画像表示装置に係り、特に、視差を持った2系統のカメラの位置姿勢を検出し、検出された位置姿勢を視点とした時の対象物の3次元モデルを再構築し、2系統のカメラからの各画像と重畳して表示するようにした立体画像表示装置に関する。
【0002】
【従来の技術】
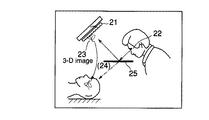
従来、立体画像表示装置に関する技術として、例えば、文献「3次元プロッタ手法を用いた臓器の立体表示及び生体との合成観察の試み」(映像情報(M)、Vol.26,No.20,p.1169)においては、図1に示すように、3次元立体表示装置21上に表示されたコンピュータによる画像生成に係るCG画像23と、観察者が肉眼22で見ている実像24とをハーフミラー25により重畳させて表示している。
【0003】
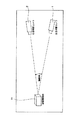
また、特開平9−147142号公報においては、図2に示すように、被観察物体31としての頭部の移動を検出するトラッキング手段としての位置・姿勢検出34及び決定手段35を用いれば、移動する視点に対応するコンピュータによる画像生成に係る画像を観察者32が見ている表示手段33上に生成することが可能になる技術が開示されている。
【0004】
ところで、一般に、コンピュータによる画像生成においては計算時間による時間的な遅れが生じる。
【0005】
また、表示装置上に表示されたCG画像と、観察者が肉眼で見ている像とを重畳させ表示するような場合においては、肉眼で見えている画像に対し遅れ時間に頭部が移動した分のずれ(ダイナミックレジストレーションエラー)が生じてしまう場合がある。
【0006】
また、画像の生成に時間がかかると、ライブ画像と生成画像との間のずれ(ダイナミックレジストレーションエラー)が大きくなり、使用上で支障をきたす場合がある。
【0007】
しかるに、コンピュータの処理能力には限界がある一方、表示画像に対しての要求は高解像度など複雑化の一途をたどっている。
【0008】
なお、文献「Improving Static and Dynamic Registration in an Optical See−through HMD Proceedings of SIGGRAPH ′94,pp.197−204」では、図3に示すように、頭部の動きを検出するセンサ40により検出された観察者の頭部41の位置姿勢情報をもとに、画像生成用コンピュータ42により視線に対応したCG画像を生成する際に、画像生成用コンピュータ42内において頭部の動きを予測し画像生成の時間遅れによるダイナミックレジストレーションエラーを少なくする試みがなされている。
【0009】
【発明が解決しようとする課題】
しかしながら、上述した図1及び図2に示すような従来の技術による手法において、両眼視差を用いた立体視を行った場合には、カメラ位置姿勢の計測計算を、左右視野のそれぞれに対して行う必要があるので、その計算に時間がかかると、それが2系統になるため、更なる時間の遅れを招く恐れがあった。
【0010】
また、上述した図3に示すような従来の技術による手法において、両眼視差を用いた立体視を行った場合には、予測を行うための計算を、左右視野のそれぞれに対して行う必要があるので、その予測計算に時間がかかると、それが2系統になるため、更なる時間の遅れを招く恐れがあった。
【0011】
本発明は、以上のような従来技術の不具合に鑑みてなされたもので、立体視を行う場合でも、時間遅れの少ない画像重畳システムとして構成される立体画像表示装置を提供することを目的とする。
【0012】
【課題を解決するための手段】
本発明によると、上記課題を解決するために、
(1) 観察対象を撮像する複数の撮像手段と、
上記複数の撮像手段の位置及び姿勢を各々検出する位置姿勢検出手段と、
上記観察対象の3次元データを保持するデータ保持手段と、
各撮像手段の位置及び姿勢に応じて上記3次元データより2次元画像を各々生成し、上記各撮像手段の撮像した各画像と重畳する画像重畳手段と、
を具備する立体画像表示装置において、
上記位置姿勢検出手段の各検出結果より、各撮像手段の相対的な位置及び姿勢を求める相対位置検出手段と、
上記上記相対位置検出手段によって求めた相対的な位置及び姿勢を用いて、一つの撮像手段の位置及び姿勢より他の撮像手段の位置及び姿勢を求める手段をさらに具備することを特徴とする立体画像表示装置が提供される。
【0013】
また、本発明によると、上記課題を解決するために、
(2) 撮像手段の位置及び姿勢より、所定時間後の撮像手段の位置及び姿勢を予測する予測手段をさらに具備し、
上記画像重畳手段は、上記予測手段で予測された各撮像手段の位置及び姿勢に応じて上記3次元データより2次元画像を各々生成することを特徴とする(1)記載の立体画像表示装置が提供される。
【0015】
【発明の実施の形態】
以下図面を参照して本発明の実施の形態について説明する。
【0016】
(第1の実施の形態)
図4は、本発明による立体画像表示装置の第1の実施の形態の構成を示すブロック図である。
【0017】
すなわち、この第1の実施の形態による立体画像表示装置は、次のように構成されている。
【0018】
図4において、参照符号1、2は、それぞれ左目用、右目用のライブ画像を入力するためのカメラ、
参照符号3は、被観察物体11の3次元モデルデータ格納部、
参照符号4は、左目用カメラ1の位置姿勢を検出するための左目用視野位置検出手段、
参照符号5は、右目用カメラ2の位置姿勢を検出するための右目用視野位置検出手段、
参照符号6は、左目用及び右目用視野位置検出手段4、5からの出力に基づいてカメラ1、2の相対対位置姿勢を求めるための相対位置検出手段、
参照符号7は、相対位置検出手段6からの相対位置データ及び左目用視野位置検出手段4からの左目用視野位置姿勢データに基づき、右目用の視野位置姿勢データを求める右目用視野位置計算手段、
参照符号8は、3次元モデルデータ格納部3の3次元モデルデータと左目用視野位置検出手段4及び右目用視野位置計算手段7からの左右の視野位置姿勢データに基づき、それぞれの視野に対応する画像データを再構成し、左目用及び右目用カメラ1、2からの左目用、右目用のライブ画像との重畳を行う画像再構成重畳手段、
参照符号9は、重畳された左右の画像データを立体画像表示するための画像表示手段である。
【0019】
次に、この第1の実施の形態による立体画像表示装置の作用を説明する。
【0020】
左目用及び右目用カメラ1、2は立体視をするための視差を得るため、通常、眼幅に相当する50mmから100mmの間隔をおいて配置されているが、この間隔を広く取ればそれだけ大きな視差を得ることができる。
【0021】
また、左目用及び右目用カメラ1、2は、図5に示すように、輻輳角Θと呼ばれる収束角度を持つことで、立体視を容易にするようになっている。
【0022】
この場合、被観察物体11が、視点の近くにある場合には輻輳角はより大きくした方が見やすいことが知られている。
【0023】
そのため、被観察物体11の位置による輻輳角や視差の大小による見易さを調整するために、カメラの設置幅、輻輳角については調整を行う場合がある。
【0024】
図4において、カメラ1、2からの画像データは、画像再構成重畳手段8に入力される。
【0025】
この画像再構成重畳手段8には、同時に、その時点のカメラ1、2の視野位置検出手段4、5の検出結果(L,R)及び3次元モデルデータ格納部3からの3次元モデルデータが入力され、それらに基づいて右目用、左目用のCG画像データが生成される。
【0026】
ここで、画像再構成重畳手段8は、3次元モデルデータ格納部3の3次元モデルデータと左目用視野位置検出手段4及び右目用視野位置計算手段7からの左右の視野位置姿勢データに基づき、それぞれの視野に対応する画像データを再構成することにより、右目用、左目用のCG画像データを生成したのち、左目用及び右目用カメラ1、2からの左目用、右目用のライブ画像との重畳を行う。
【0027】
そして、このようにして重畳された画像データは、画像表示手段9において立体視表示される。
【0028】
この状態において、観察者は、カメラ1、2の設置幅、輻輳角についての調整を行う。
【0029】
一旦、調整を行った後は、同じ被観察物体11を観察している間は再調整の必要がない。
【0030】
以上において、カメラ1、2の視野位置検出手段4、5の検出結果として与えられるL及びRは、各カメラの基準座標系の中での位置姿勢を表し、例えば、左目視野Lは次のように表記できる。
【0031】
ここで、座標系は直交座標系とし、基準座標としてG(X,Y,Z)を用いるものとする。
【0032】
【数1】

Rotはx,y,z軸回りの回転行列を、tx,ty,tzは基準座標の中での座標値を表す。
【0034】
カメラ1、2の視野位置検出にはトラッキング装置が用いられるが、例えば、赤外光を発光するLEDを複数個もち、これらを順に発光させ、それを複数個のCCDラインセンサで検出する方式などがある。
【0035】
しかし、複数個のLEDの発光、検出結果の計算、及び結果の通信などに数ms〜数10msの時間がかかる。
【0036】
画像表示手段9としてCRTなどを用いる場合には、そのリフレッシュレートは30ms程度であり、この検出による遅れは無視できない。
【0037】
上記調整が終わった状態の右目、左目視野用の座標値をそれぞれL0 ,R0 とする。
【0038】
ここで、両視野の相対的な関係はW=L0 /R0 として表される。
【0039】
この両視野の相対的な関係Wが求まった後は、右目用視野位置検出手段5を停止し、左目用視野位置検出手段4のみを働かせるようにする。
【0040】
この状態で、得られた左目用視野位置検出結果LにWを乗ずることにより、その時点での右目用視野位置検出結果Rを得ることができる。
【0041】
このL及びRを用いて、3次元モデルデータ格納部3から右目用、左目用の3次元モデルデータに基づきCG画像を生成する
このようにして生成されたCG画像にカメラ1、2からの画像信号が重畳されて画像表示手段9において立体視表示される。
【0042】
このことにより、調整時以外は視野位置検出手段4、5のうちのを1つだけ動作させれば良く、立体視を行う場合でも、時間遅れの少ない画像重畳システムを提供することが可能となる。
【0043】
なお、上述したようなこの第1の実施の形態の各構成は、当然、各種の変形、変更が可能である。
【0044】
例えば、右目用視野位置検出結果だけを用い、左目用視野位置を計算することもできる。
【0045】
また、多数のカメラを用い、同時に複数の視野の画像を入力する3次元計測装置などにおいても応用が可能である。
【0046】
(第2の実施の形態)
次に、本発明の第2の実施の形態を図6を用いて説明する。
【0047】
図6は、本発明による立体画像表示装置の第2の実施の形態の構成を示すブロック図である。
【0048】
すなわち、この第2の実施の形態による立体画像表示装置は、次のように構成されている。
【0049】
図6において、参照符号1、2は、それぞれ左目用、右目用のライブ画像を入力するためのカメラ、
参照符号3は、被観察物体11の3次元モデルデータ格納部、
参照符号4は、左目用カメラ1の位置姿勢を検出するための左目用視野位置検出手段、
参照符号5は、右目用カメラ2の位置姿勢を検出するための右目用視野位置検出手段、
参照符号10は、左目用視野位置検出手段4からの出力に基づいて左目用視野位置を予測する左目用視野位置予測手段、
参照符号6は、左目用及び右目用視野位置検出手段4、5からの出力に基づいてカメラ1、2の相対対位置姿勢を求めるための相対位置検出手段、
参照符号7は、相対位置検出手段6からの相対位置データ及び左目用視野位置検出手段4からの左目用視野位置姿勢データ並び左目用視野位置予測手段10からの出力に基づき、右目用の視野位置姿勢データを求める右目用視野位置計算手段、
参照符号8は、3次元モデルデータ格納部3の3次元モデルデータと左目用視野位置検出手段4及び右目用視野位置計算手段7からの左右の視野位置姿勢データに基づき、それぞれの視野に対応する画像データを再構成し、左目用及び右目用カメラ1、2からの左目用、右目用のライブ画像との重畳を行う画像再構成重畳手段、
参照符号9は、重畳された左右の画像データを立体画像表示するための画像表示手段である。
【0050】
次に、この第2の実施の形態による立体画像表示装置の作用を説明すると、左目用視野位置予測手段10を使用するか使用しないかが、上述した第1の実施の形態による立体画像表示装置の作用とことなり、基本的な作用は第1の実施の形態に準じている。
【0051】
したがって、ここでは第1の実施の形態の作用と異なる点のみについて説明するものとする。
【0052】
前述したように、被観察物体11の位置による輻輳角や視差の大小による見易さを調整するために、カメラの設置幅、輻輳角については調整を行う場合には、左目用視野位置予測手段10を使用しないで、相対位置検出手段6により左目用及び右目用視野位置検出手段4、5からの出力に基づいてカメラ1、2の相対位置姿勢検出を行うことにより、両視野の相対的な関係Wを求める。
【0053】
これは、眼幅、輻榛角の設定時においては、処理の時間遅れはあまり問題にならないため、左目用視野位置予測手段10を用いずに、左目用及び右目用視野位置検出手段4、5からの出力を用いて相対位置検出を行うことにより、両視野の相対的な関係Wを求めるようにしているものである。
【0054】
次に、調整を終了し、被観察物体11の観察を始める時点から、右目用視野位置検出手段5を停止し、左目用視野位置検出手段4からの出力Lを左目用視野位置予測手段10にへ入力させる。
【0055】
そして、左目用視野位置予測手段10においては、時間遅れの分の予測を行いL´を求める。
【0056】
この左目用視野位置予測手段10としては、カルマンフィルタ等を用い、速度、位置を推定する方法や、予測用に加速度センサなどを用意しその出力をあわせて用いる方法がある。
【0057】
次に、左目用視野位置予測手段10によって予測されたL´にWを乗ずることにより、右目視野位置の予測後の結果であるR´を得ることができる。
【0058】
このようにして得られたL´及びR´を用いて、第1の実施の形態と同様にして画像再構成重畳手段8に3次元モデルデータ格納部3からの3次元モデルデータに基づき右目用、左目用の画像データを生成することにより、画像表示手段9において立体視表示が可能となる。
【0059】
このことにより、調整時以外は視野位置検出手段4、5のうちのを1つだけ動作させれば良く、立体視を行う場合でも、時間遅れの少ない画像重畳システムを提供することが可能となる。
【0060】
なお、上述したようなこの第2の実施の形態の各構成は、当然、各種の変形、変更が可能である。
【0061】
例えば、右目用視野位置検出結果だけを用い、左目用視野位置を計算することもできる。
【0062】
また、多数のカメラを用い、同時に複数の視野の画像を入力する3次元計測装置などにおいても応用が可能である。
【0063】
そして、上述したような実施の形態で示した本明細書には、特許請求の範囲に示した請求項1乃至3以外にも、以下に付記1乃至付記2として示すような発明が含まれている。
【0064】
(付記1)視差を持った2系統の画像を入力する手段(1)、(2)と、
被観察物体(11)の3次元コンピュータグラフィクスモデル(3)とを備え、 該入力手段の位置姿勢を検出する手段(4)、(5)から検出された位置姿勢に基づき入力手段の視点位置からの視野を3次元モデル(3)に基づき再生し、入力手段(1)と(2)との相対関係を求めることで、観察時は位置姿勢検出手段(4)または(5)のみを使い視差を持った2系統の視点の位置姿勢を算出して3次元モデルを再構築し、2系統の入力手段による視差を持ったライブ画像を、再構成された3次元モデルに対して重畳して表示することを特徴とする立体画像表示装置。
【0065】
(作用)
入力手段の位置姿勢を検出する手段(4)、(5)から検出された位置姿勢に基づき、2つの入力手段の相対的関係(W)を求める。
【0066】
次に、左目用視野位置検出手段(4)の情報に基づき左目視点の位置姿勢(L)を求め、(L)に(W)を乗ずることで(5)の出力結果である右目視点の位置姿勢と等価な(R)が求まる。
【0067】
求まった(L)及び(R)に基づき視点からの画像の再構築を行う。
【0068】
(効果)
初期処理において2つの入力手段の位置姿勢の相対的関係(W)を求めることで、システムの稼動中は1つの検出手段ゝから両目に対応するそれぞれの視点の位置姿勢を計算でき、システムの高速化が図れる。
【0069】
(付記2)視差を持った2系統の画像を入力する手段(1)、(2)と、
被観察物体(11)の3次元コンピュータグラフィクスモデル(3)とを備え、 該入力手段の位置姿勢を検出する手段(4)、(5)から検出された位置姿勢に基づき入力手段の視点位置からの視野を3次元モデル(3)に基づき再生し、画像の表示時の位置姿勢を推定する位置予測手段(6)を備え、入力手段(1)と(2)との相対関係を求めることで、観察時は位置姿勢検出手段(4)及び位置予測手段(6)を使い視差を持った2系統の視点の位置姿勢を算出して3次元モデルを再構築し、2系統の入力手段による視差を持ったライブ画像を、再構成された3次元モデルに対して重畳して表示することを特徴とする立体画像表示装置。
【0070】
(作用)
入力手段の位置姿勢を検出する手段(4)、(5)から検出された位置姿勢に基づき、2つの入力手段の相対的関係(W)を求める。
【0071】
次に、左目用視野位置検出手段(4)の情報に基づき視点の位置姿勢(L)を求め、(L)を位置予測手段(6)に入力することによって、予測時点の位置姿勢(L´)を求める。
【0072】
次に、(L´)に(W)を乗ずることで右目視点の予測時点の位置姿勢(R´)が求まる。
【0073】
求まった(L´)及び(R´)に基づき視点からの画像の再構築を行う。
【0074】
(効果)
2つの入力手段の位置姿勢の相対的関係(W)を求め、1つの検出手段からの位置姿勢情報により予測時点の位置姿勢を推定することによって、もう一方の予測時点の位置姿勢が予測計算をすることなしに求められ、システムの高速化が図れる。
【0075】
【発明の効果】
従って、以上説明したように、本発明によれば、立体視を行う場合でも、時間遅れの少ない画像重畳システムとして構成される立体画像表示装置を提供することができる。
【図面の簡単な説明】
【図1】図1は、3次元立体表示装置21上に表示されたコンピュータによる画像生成に係るCG画像23と、観察者が肉眼22で見ている実像24とをハーフミラー25により重畳させて表示する従来の技術を示す図である。
【図2】図2は、被観察物体31としての頭部の移動を検出するトラッキング手段としての位置・姿勢検出34及び決定手段35を用いることにより、移動する視点に対応するコンピュータによる画像生成に係る画像を観察者32が見ている表示手段33上に生成する従来の技術を示す図である。
【図3】図3は、頭部の動きを検出するセンサ40により検出された観察者の頭部41の位置姿勢情報をもとに、画像生成用コンピュータ42により視線に対応したCG画像を生成する際に、画像生成用コンピュータ42内において頭部の動きを予測し画像生成の時間遅れによるダイナミックレジストレーションエラーを少なくする試みがなされている従来の技術を示す図である。
【図4】図4は、本発明による立体画像表示装置の第1の実施の形態の構成を示すブロック図である。
【図5】図5は、左目用及び右目用カメラ1、2が輻輳角Θと呼ばれる収束角度を持つことで、立体視を容易にするようになっていることを示す図である。
【図6】図6は、本発明による立体画像表示装置の第2の実施の形態の構成を示すブロック図である。
【符号の説明】
11…被観察物体、
1、2…左目用、右目用のライブ画像を入力するためのカメラ、
3…被観察物体11の3次元モデルデータ格納部、
4…左目用視野位置検出手段、
5…右目用視野位置検出手段、
6…相対位置検出手段、
7…右目用視野位置計算手段、
8…画像再構成重畳手段、
9…画像表示手段、
10…左目用視野位置予測手段。
Claims (2)
- 観察対象を撮像する複数の撮像手段と、
上記複数の撮像手段の位置及び姿勢を各々検出する位置姿勢検出手段と、
上記観察対象の3次元データを保持するデータ保持手段と、
各撮像手段の位置及び姿勢に応じて上記3次元データより2次元画像を各々生成し、上記各撮像手段の撮像した各画像と重畳する画像重畳手段と、
を具備する立体画像表示装置において、
上記位置姿勢検出手段の各検出結果より、各撮像手段の相対的な位置及び姿勢を求める相対位置検出手段と、
上記相対位置検出手段によって求めた相対的な位置及び姿勢を用いて、一つの撮像手段の位置及び姿勢より他の撮像手段の位置及び姿勢を求める手段をさらに具備することを特徴とする立体画像表示装置。 - 撮像手段の位置及び姿勢より、所定時間後の撮像手段の位置及び姿勢を予測する予測手段をさらに具備し、
上記画像重畳手段は、上記予測手段で予測された各撮像手段の位置及び姿勢に応じて上記3次元データより2次元画像を各々生成することを特徴とする請求項1記載の立体画像表示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27306899A JP4144981B2 (ja) | 1999-09-27 | 1999-09-27 | 立体画像表示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27306899A JP4144981B2 (ja) | 1999-09-27 | 1999-09-27 | 立体画像表示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001103512A JP2001103512A (ja) | 2001-04-13 |
| JP4144981B2 true JP4144981B2 (ja) | 2008-09-03 |
Family
ID=17522709
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP27306899A Expired - Fee Related JP4144981B2 (ja) | 1999-09-27 | 1999-09-27 | 立体画像表示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4144981B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004022330B3 (de) * | 2004-05-06 | 2005-10-20 | Leica Microsystems Schweiz Ag | Mikroskop |
| US8780185B2 (en) | 2009-11-25 | 2014-07-15 | Olympus Imaging Corp. | Image pickup apparatus having a display controlled using interchangeable lens information and/or finder information |
| JP5638791B2 (ja) * | 2009-11-25 | 2014-12-10 | オリンパスイメージング株式会社 | 撮像装置 |
-
1999
- 1999-09-27 JP JP27306899A patent/JP4144981B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001103512A (ja) | 2001-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3745117B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP3338618B2 (ja) | 実空間画像と仮想空間画像の表示方法及び表示装置 | |
| US6570566B1 (en) | Image processing apparatus, image processing method, and program providing medium | |
| JP3728160B2 (ja) | 奥行き画像計測装置及び方法、並びに複合現実感提示システム | |
| TWI520576B (zh) | 將二維影像轉換爲三維影像的方法與系統及電腦可讀媒體 | |
| JP4933406B2 (ja) | 画像処理装置、画像処理方法 | |
| US20060018509A1 (en) | Image generation device | |
| US6608622B1 (en) | Multi-viewpoint image processing method and apparatus | |
| JPH07287761A (ja) | 画像処理装置及び画像処理方法 | |
| JPH11102438A (ja) | 距離画像生成装置及び画像表示装置 | |
| JP2008210276A (ja) | 三次元モデル情報の生成方法及び装置 | |
| WO2020185405A1 (en) | Registration of local content between first and second augmented reality viewers | |
| KR100911066B1 (ko) | 화상 표시 시스템, 화상 표시 방법 및 기록 매체 | |
| JP3032414B2 (ja) | 画像処理方法および画像処理装置 | |
| CN110969706B (zh) | 增强现实设备及其图像处理方法、系统以及存储介质 | |
| JP2849313B2 (ja) | 画像記録再生装置 | |
| JP6618260B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP2001256482A (ja) | 視差画像生成装置および視差画像生成方法 | |
| JP4144981B2 (ja) | 立体画像表示装置 | |
| JPH06339454A (ja) | 計測用内視鏡装置 | |
| JP7175715B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP4256597B2 (ja) | 立体画像表示装置 | |
| JP3054312B2 (ja) | 画像処理装置及び方法 | |
| JPH05266215A (ja) | 画像表示装置 | |
| JP2018078496A (ja) | 三次元動画像表示処理装置、動画情報記録媒体、動画情報提供サーバ、並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080422 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080610 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080617 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110627 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120627 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120627 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130627 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |