JP4108203B2 - レーダアンテナのモータ回転数制御回路 - Google Patents
レーダアンテナのモータ回転数制御回路 Download PDFInfo
- Publication number
- JP4108203B2 JP4108203B2 JP31170498A JP31170498A JP4108203B2 JP 4108203 B2 JP4108203 B2 JP 4108203B2 JP 31170498 A JP31170498 A JP 31170498A JP 31170498 A JP31170498 A JP 31170498A JP 4108203 B2 JP4108203 B2 JP 4108203B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- output
- motor
- circuit
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images





Landscapes
- Control Of Direct Current Motors (AREA)
- Radar Systems Or Details Thereof (AREA)
- Control Of Electric Motors In General (AREA)
Description
【発明の属する技術分野】
この発明は、レーダアンテナのモータ回転の安定化を図るモータ回転数制御回路に関する。
【0002】
【従来の技術】
レーダ装置には、アンテナモータ(DCモータ等)に与える2種類以上の電圧を用意し、これを切り替えることによってアンテナ回転数を切り替え可能にしたものがある。最も簡単な構成のものは、単純にアンテナモータに対して2種類以上の電圧のいずれかを供給できるようなスイッチ回路を設ける。また、その他簡単に考えられる回路としては、単純なフィードバック回路によるものである。例えば、アンテナモータの回転信号であるベアリングパルスを生成する回路を設けた装置では、このパルスをF/Vコンバータで電圧に変換し、この電圧の変化に応じてモータに供給する電圧を切り替え制御する。また、実開昭62−127108号公報に示されているように、モータへの供給電圧と設定された電圧とを比較し、その比較誤差に基づいてモータへの供給電圧を制御するようにしたものもある。
【0003】
【発明が解決しようとする課題】
しかしながら、単純に2種類以上の電圧からいずれかの電圧をスイッチによって選択して供給する装置では、アンテナの回転数の安定化を保証することができない。例えば、一般にレーダアンテナを回転駆動するモータに加わる負荷の大きさは、風圧や温度変化等によって変動するが、単純に、2種類以上の電圧を切り替える構成の装置では、特に、電圧が定格以下の大きさに設定された場合にモータの駆動トルクが低下するために、この負荷トルク変動に対しての追随が困難となり、モータ回転がハンチングを起こすことがある。また、モータへの供給電圧をフィードバックして設定回転数に対応する電圧との誤差電圧を求め、これに基づいてモータ回転数を制御する装置では、モータの回転数とモータへの供給電圧とが比例していることを前提としているが、負荷トルク変動時等においては両者の関係は非線形となり常に1対1の関係にならないために、やはりモータ回転数の安定化を実現することが困難になってくる。
【0004】
本発明の目的は、モータの実際の回転数を検出する回転数センサの出力パルスを用いてモータの回転数を安定に制御することのできるレーダアンテナのモータ回転数制御回路を提供することにある。
【0005】
【課題を解決するための手段】
請求項1の発明は、レーダアンテナを回転駆動するアンテナモータの回転数センサ出力をパルス列として生成するとともに、該パルス列に基づいて前記レーダアンテナの方位角を表す極座標系のアンテナ方位信号を発生するアンテナ回転パルス信号発生部と、
前記パルス列を鋸歯状の電圧に変換するF−Vコンバータと、
該F−Vコンバータの出力結果に応じたPWM制御を前記アンテナモータに対して行う駆動信号を作成するモータドライブ部と、を備えてなるものである。
【0006】
図1は、この発明に係るレーダアンテナのモータ回転数制御回路の基本構成図を示している。レーダアンテナ1はDCモータで構成されるアンテナモータ2で駆動され、このアンテナモータ2はモータドライブ回路3によって駆動される。アンテナモータ2には、スリットと光学センサ等からなる回転数を検出するセンサが設けられており、この出力がベアリングパルス生成回路4に入力される。ベアリングパルス生成回路4は、上記アンテナモータ2の回転数センサ出力をパルス列として生成する回路であって、通常は、1パルス/1°の分解能で、1KHz 以下(例えば、100〜250Hz)のパルス列を生成する。なお、ベアリングパルス生成回路4は、通常、アンテナ1の方位角を表すθ信号をアンテナ方位信号としてレーダ装置本体の座標変換回路5に供給するために設けられているものであって、この発明のモータ回転数制御回路においてはこのベアリングパルス生成回路4の出力をアンテナ回転数安定化制御のために兼用する。座標変換回路5は極座標で得られるレーダ受信信号をラスタ表示器上に表示するため直交座標に変換するための回路である。
【0007】
ベアリングパルス生成回路4の出力パルスはF/Vコンバータ6に入力される。このF/Vコンバータ6は、一般には、出力にリップルを含んでいるために、リップル調整用の出力段に設けられるCRを適当に調整することによって、鋸歯状の電圧を出力することができる。F/Vコンバータ6の出力電圧は、ベアリングパルス生成回路4から出力されるパルス列の周波数に比例して上下するが、その応答速度は、パルス列の周波数(応答速度)と同様に100〜250Hzのままである。アンテナ回転数切り替え回路7は、複数のアンテナ回転数を切り替える回路であって、切り替えられたアンテナ回転数に対応する電圧を出力する。コンパレータ8は、このアンテナ回転数切り替え回路7の出力電圧とF/Vコンバータ6の出力電圧とを比較し、その誤差出力をモータドライブ回路3に入力する。モータドライブ回路3は、PWM回路を含んでおり、コンパレータ8から出力されるパルスのデューティに応じてモータ2に対して出力するドライブ用の10kHz 以上のパルス信号(例えば、22.5kHz )を制御する。
【0008】
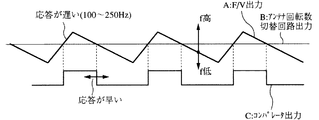
上記F/Vコンバータ6は、図2に示すように、シュミット回路、フリップフロップ(F.F)、チャージポンプ、出力段から構成されており、出力段にはコンデンサCと抵抗Rの時定数回路が接続される。このコンデンサCと抵抗Rの時定数回路によってF/Vコンバータの出力波形のΔV(リップル)を決める。請求項1の発明では、このコンデンサCと抵抗Rの値を適当な大きさに設定することによって、ベアリングパルスをこのF/Vコンバータを通した時に、その出力に比較的大きなリップルを持つ鋸歯状の電圧が出力されるようにする。その結果、コンパレータ8の出力は図3のようになる。すなわち、F/Vコンバータ出力に対して、アンテナ回転数切り替え回路7の出力がしきい値として作用し、コンパレータ8は、F/Vコンバータ6の出力がしきい値以上の期間をHとするパルス列を出力する。この場合、F/Vコンバータ6の出力は鋸歯状波であるために、図4に示すように、ベアリングパルスの低速の応答性が高速の応答性に改善される。図4において、例えばベアリングパルスの周期TがΔt1だけ伸びると、それに応じて信号A(F/Vコンパータ出力)も図の点線のように変化し、更にそれに応じて、コンパレータ出力Cの周期がΔt2だけ伸びる。この時、信号Aはそのレベルが低下するが、鋸歯状波であるためにしきい値である信号Bとの比較結果である出力CはΔt1よりも長いΔt2だけ周期が伸びる。すなわち、高感度の応答特性を得ることができる。
【0009】
このように、図1に示す回路構成によると、100〜250Hz程度の応答性を増幅して高感度な高速応答特性とすることができるから、モータ2の回転数の安定化を実現することができる。例えば、ベアリングパルス生成回路4から出力される100〜250Hz程度の低速のベアリングパルスの応答性でモータ2の回転数の安定化を図る単純な構成では、負荷トルクが変動したときにアンテナ1の回転が速くなったり遅くなったりするハンチング現象を起こすことがあるが、図1のように構成することで、このような現象をなくすことができる。特に、モータ2の設定回転数を下げて定格以下の電圧で制御した場合、モータ2に対する供給トルクが低下するために回転数の不安定性は一層増大するが、図1に示す回路構成によれば、そのような場合にも安定した回転数を得ることができる。
【0010】
また、図1において、ベアリングパルス生成回路4は、元来、レーダ装置本体の座標変換部5に対してアンテナ方位信号θを供給するものであるが、図1においては、このベアリングパルス生成回路4を用いてモータ回転数の安定化の制御を行うようにしている。このため、F/Vコンバータ6に対して供給するパルスを生成するための特別の回路を必要としない。なお、モータドライブ回路3は、通常のPWM制御を行うための回路を含み、このPWM制御回路は、上記100〜250Hz程度の低速の信号に比較して、より高周波の(22.5KHz 等、10KHz 程度以上)鋸歯状波を発生する鋸歯状波発生回路と、上記コンパレータの出力を平滑した信号とを対比するPWMコンパレータを含んでいる。
【0011】
【発明の実施の形態】
図5は、この発明の実施形態であるレーダアンテナのモータ回転数制御回路の構成図である。
【0012】
同図において、各符号は図1に示す基本構成図の符号に対応している。なお、この実施形態では、波形整形回路9をF/Vコンバータ6の前段に配置し、F/Vコンバータ6に入力するための信号を波形整形する。アンテナ回転数切り替え回路7は、この例では2段階(H:42回転(分)、L:24回転(分))としている。スイッチSW1をHまたはLに設定することによって、アンテナ回転数切替回路7が、その設定位置に応じた電圧をコンパレータ8の一方の入力に導く。
【0013】
モータドライブ回路3は、PWMコンパレータ30を含み、その入力側には鋸歯状波発生回路31、コンパレータ8の出力を平滑する平滑回路32および電源オン時やリセット時などにソフトスタートを行うためのソフトスタート制御回路33が接続されている。また、PWMコンパレータ30の出力側には、ドライブ回路34、アンテナモータ電源回路35、アンテナモータへの電源電圧をドライブ回路34の出力に基づいてオンオフするスイッチング回路36、およびスイッチング出力を平滑する平滑回路37が接続されている。
【0014】
図6は、上記制御回路の各部の波形を示す図である。以下、この波形図を参照して動作を説明する。
【0015】
ベアリングパルス発生回路4で発生したベアリングパルスは、波形整形部9で波形整形されてからF/Vコンバータ6に入力する。アンテナ回転数切替回路7では、回転数がHまたはLにスイッチによって設定され、設定された回転数に応じたレベルの電圧をコンパレータ8に対して出力する。F/Vコンバータ6の出力は、図2〜図4において説明したように、その出力は100〜250Hzの低速の応答性を有する鋸歯状の波形である。一方、コンパレータ8の出力は、図3、図4において説明したように、極めて速い応答性を持つパルス列となる。
【0016】
PWMコンパレータ30の入力側に接続される鋸歯状波発生回路31は、10KHz 以上(この例では22.5KHz )の鋸歯状波を発生する回路で、PWMコンパレータ30において、この鋸歯状波と平滑回路32の出力とを比較する。平滑回路32は、上記コンパレータ8の出力を平滑する回路である。なお、ベアリングパルス発生回路4は、アンテナ1が1°回転する度に1パルスを発生する。このため、スイッチSW1がL設定(24回転)では、ベアリングパルスの周波数は、360×24/60=144Hzとなり、スイッチSW1がH設定(42回転)では、360×42/60=252Hzとなる。平滑回路32は、この周波数が144Hz(252Hz)より下がると出力電圧が0〜3Vの間のある所定電圧から0Vに向かって低下するように、また、144Hz(252Hz)より上がると上記所定電圧から3Vに向かって上昇するような時定数回路を含み、かつ、その電圧変化は高速の応答性を保持している。
【0017】
PWMコンパレータ30は、22.5KHz の鋸歯状波と平滑回路32の出力を比較して、パルス列を出力するが、図6に示すように、平滑回路32の出力は鋸歯状波の波形に対して、ほぼ平行に上下に変動する。なお、この平滑回路32の出力は、100〜250Hz程度ではリップルを持っているが、22.5KHz の周波数ではほぼ同一レベルのフラットな信号(CR時定数回路での充電時の充電電圧または放電時の放電電圧)として捉えることができる。PWMコンパレータ30は、この平滑出力の上下変動に応じてデューティが約0.1〜約0.9の範囲で変化するパルス列をドライブ回路34に出力すると共に、このドライブ回路34によってアンテナモータ2への供給電圧(30V)をオンオフスイッチングし、これを平滑回路37で平滑してアンテナモータ2に供給する。
【0018】
以上のようにして、通常の動作状態においては、鋸歯状波発生回路31と平滑回路32の出力を比較することによってPWM制御が行われる。
【0019】
なお、ソフトスタート制御回路33は、モータの回転動作を開始させるときに機能する回路である。PWMコンパレータ30は、鋸歯状波発生回路31から入力する鋸歯状波と、平滑回路32またはソフトスタート制御回路33のいずれかレベルの高い方の信号とを比較するように構成されている。モータ回転数制御回路の動作開始時(電源オン時)には、SW2(送信SWと連動)はLになっており、ソフトスタート制御回路33はHに固定されて、PWMコンパレータ30の出力は出ない。SW2がH(送信SWオン)となると、徐々にそのレベルを低下させ、PWMコンパレータ30の出力のデューティが0から徐々に増加する。したがって、スイッチSW2がHに設定されてからしばらくの間は平滑回路32の出力にかかわらずアンテナモータ2は徐々に起動され、適当な回転数になった段階で、平滑回路32の出力がソフトスタート制御回路33の出力を上回るようになり、以後、この平滑回路32の出力が有効となって以下通常のPWM制御が行われていく。
【0020】
以上のように、F/Vコンバータ6の出力を鋸歯状にし、コンパレータ8において、この鋸歯状の電圧とアンテナ回転数切替回路7によって設定された電圧とを比較することにより、応答速度が極めて速くなり、アンテナモータ2の回転数を安定させることができる。特に、スイッチSW1をLに設定してアンテナモータ2を定格以下で駆動する低トルクの状態においても、回転数の安定化を実現でき、ハンチング現象などが生じるのをなくすことができる。
【0021】
【発明の効果】
この発明によれば、アンテナモータの回転数の安定化を実現することができ、特に、定格以下で駆動する場合にもその安定性を図ることができる。
【図面の簡単な説明】
【図1】モータ回転数制御回路の基本構成図
【図2】F/Vコンパータの構成図
【図3】この発明の動作原理について説明する図
【図4】この発明の動作原理について説明する詳細な波形図
【図5】この発明の実施形態であるモータ回転数制御回路の構成図
【図6】波形図
Claims (3)
- レーダアンテナを回転駆動するアンテナモータの回転数センサ出力をパルス列として生成するとともに、該パルス列に基づいて前記レーダアンテナの方位角を表す極座標系のアンテナ方位信号を発生するアンテナ回転パルス信号発生部と、
前記パルス列を鋸歯状の電圧に変換するF−Vコンバータと、
該F−Vコンバータの出力結果に応じたPWM制御を前記アンテナモータに対して行う駆動信号を作成するモータドライブ部と、を備えてなる、レーダアンテナモータの回転数制御回路。 - レーダアンテナを回転駆動するアンテナモータの回転数センサ出力をパルス列として生成するとともに、該パルス列に基づいて前記レーダアンテナの方位角を表す極座標系のアンテナ方位信号を発生するアンテナ回転パルス信号発生部と、
前記パルス列を鋸歯状の電圧に変換するF−Vコンバータと、
アンテナ回転数の設定値に対応した電圧を出力するアンテナ回転数切替回路と、
アンテナ回転数切替回路の出力をしきい値としてF−Vコンバータの出力との比較結果を出力するコンパレータと、
前記比較結果に応じたアンテナモータの駆動信号を作成するモータドライブ部と、を備えてなる、レーダアンテナモータの回転数制御回路。 - 前記パルス列の周波数は1kHz以下であり、
前記モータドライブは、前記コンパレータの出力を平滑する平滑回路と、10kHz以上の周波数の鋸歯状波を生成する鋸歯状波発生回路と、平滑回路の出力をしきい値として鋸歯状波発生回路の出力との比較結果をアンテナモータの駆動信号として出力する別のコンパレータと、を備える、請求項2に記載のレーダアンテナモータの回転数制御回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31170498A JP4108203B2 (ja) | 1998-11-02 | 1998-11-02 | レーダアンテナのモータ回転数制御回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31170498A JP4108203B2 (ja) | 1998-11-02 | 1998-11-02 | レーダアンテナのモータ回転数制御回路 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000139090A JP2000139090A (ja) | 2000-05-16 |
| JP2000139090A5 JP2000139090A5 (ja) | 2005-09-15 |
| JP4108203B2 true JP4108203B2 (ja) | 2008-06-25 |
Family
ID=18020474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP31170498A Expired - Lifetime JP4108203B2 (ja) | 1998-11-02 | 1998-11-02 | レーダアンテナのモータ回転数制御回路 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4108203B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101116272B1 (ko) | 2011-02-24 | 2012-03-13 | 삼성탈레스 주식회사 | 능동제어기법과 외란관측기법을 적용한 레이더의 회전구동장치 및 그 방법 |
| KR101116277B1 (ko) * | 2011-11-25 | 2012-03-13 | 삼성탈레스 주식회사 | 능동제어기법과 외란관측기법을 적용한 레이더의 회전구동장치 및 그 방법 |
| JP6313562B2 (ja) | 2013-10-16 | 2018-04-18 | 古野電気株式会社 | レーダアンテナ装置及びレーダアンテナ装置の電源制御方法 |
| JP2015094590A (ja) * | 2013-11-08 | 2015-05-18 | 日本無線株式会社 | レーダ空中線の輻射器回転数制御装置 |
-
1998
- 1998-11-02 JP JP31170498A patent/JP4108203B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000139090A (ja) | 2000-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4931717A (en) | Load response control and method | |
| US4712050A (en) | Control system for brushless DC motor | |
| US5319299A (en) | Charging control apparatus for vehicle | |
| JP4449882B2 (ja) | 車両用発電制御装置 | |
| JP3540152B2 (ja) | エンジン駆動発電機 | |
| JP2007143392A (ja) | 可変速度駆動装置用の力率補正装置 | |
| KR101426526B1 (ko) | 차량의 교류 발전기의 전압 조정기 정밀도를 향상시키는방법 및 시스템 | |
| US7710214B2 (en) | Pulse width modulation structure enabling regulated duty cycle | |
| CN102097989B (zh) | 直流电机驱动器 | |
| JPWO2003065564A1 (ja) | 太陽光インバータの制御方法、その制御装置及び給水装置 | |
| KR20080014977A (ko) | 직류 전압 공급 시스템에 의해 전압을 공급받는 전기모터의 제어 방법 | |
| US7106028B2 (en) | Controller of A.C. generator for vehicles | |
| US4937514A (en) | AC generator control apparatus for vehicles | |
| JP2004208342A (ja) | 車両用発電制御装置 | |
| JP4108203B2 (ja) | レーダアンテナのモータ回転数制御回路 | |
| JP3091400B2 (ja) | 太陽光発電制御装置 | |
| US4296367A (en) | Speed control method for AC motors and an apparatus for the control | |
| JP2002135994A (ja) | 車両用交流発電機の電圧制御装置 | |
| JP2002204596A (ja) | インバータ制御式発電機 | |
| US4488100A (en) | Motor controller | |
| JPH0690596A (ja) | モータ駆動回路及びその駆動方法 | |
| JP2004274885A (ja) | スイッチング電源装置 | |
| JP3215785B2 (ja) | 超音波モータの周波数制御およびパルス幅制御による速度制御回路 | |
| JP2823962B2 (ja) | 直流モータの速度制御回路 | |
| JP4165015B2 (ja) | 車両用発電制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050324 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070601 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120411 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130411 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140411 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |