JP4100321B2 - セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム - Google Patents
セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム Download PDFInfo
- Publication number
- JP4100321B2 JP4100321B2 JP2003356693A JP2003356693A JP4100321B2 JP 4100321 B2 JP4100321 B2 JP 4100321B2 JP 2003356693 A JP2003356693 A JP 2003356693A JP 2003356693 A JP2003356693 A JP 2003356693A JP 4100321 B2 JP4100321 B2 JP 4100321B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- segment
- value
- blocks
- small
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000011218 segmentation Effects 0.000 description 25
- 230000010354 integration Effects 0.000 description 24
- 239000006185 dispersion Substances 0.000 description 13
- 238000000034 method Methods 0.000 description 12
- 238000012545 processing Methods 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000003111 delayed effect Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
Images








Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
を更に有し、符号化手段は、第2のセグメント作成手段から出力される信号を入力として受け、新たなセグメント単位及び孤立小ブロック単位に所定の符号化を行って符号化データを出力することを特徴とする。
コンピュータを、供給される画像信号の2次元画像を第1の形状サイズのブロックの単位で分割する第1の分割手段と、第1の分割手段により分割されたブロック内の画素が持つ輝度値及び色差値の少なくとも一方の平均値と分散値の組み合わせをブロック特徴量として、各ブロック毎に算出する第1の算出手段と、ブロック特徴量が規定値より大きな値を持つブロックは孤立ブロックとして残し、ブロック特徴量が規定値以下の値を持つブロックのうち、ブロック特徴量が近似した値を持つ隣接ブロック同士を統合してセグメントとして作成する第1のセグメント作成手段と、第1のセグメント作成手段から出力される信号を入力として受け、セグメント単位及び孤立ブロック単位に所定の符号化を行って符号化データを出力する符号化手段として機能させることを特徴とする。この発明では、第1の発明のセグメント単位画像符号化装置をコンピュータにより実現することができる。
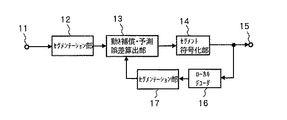
12、17 セグメンテーション部
13 動き補償・予測誤差算出部
14 セグメント符号化器
15、125、129 出力端子
16 ローカルデコーダ
121 画像メモリ
122 8×8ブロック平均・分散演算器
123、127 ブロック統合処理器
124、128 セグメントデータメモリ
126 4×4ブロック平均・分散演算器
Claims (4)
- 供給される画像信号の2次元画像を複数のブロックに分割してブロック単位に符号化するセグメント単位画像符号化装置であって、
前記供給される画像信号の2次元画像を第1の形状サイズのブロックの単位で分割する第1の分割手段と、
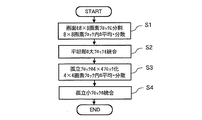
前記第1の分割手段により分割された前記ブロック内の画素が持つ輝度値及び色差値の少なくとも一方の平均値と分散値の組み合わせをブロック特徴量として、各ブロック毎に算出する第1の算出手段と、
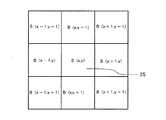
前記ブロック特徴量が規定値より大きな値を持つブロックは孤立ブロックとして残し、前記ブロック特徴量が前記規定値以下の値を持つブロックのうち、前記ブロック特徴量が近似した値を持つ隣接ブロック同士を統合してセグメントとして作成する第1のセグメント作成手段と、
前記第1のセグメント作成手段から出力される信号を入力として受け、前記セグメント単位及び前記孤立ブロック単位に所定の符号化を行って符号化データを出力する符号化手段と
を有することを特徴とするセグメント単位画像符号化装置。 - 前記第1のセグメント作成手段から出力される前記孤立ブロックを、前記第1の形状サイズより小である第2の形状サイズの小ブロックの単位で分割する第2の分割手段と、
前記第2の分割手段により分割された前記小ブロック内の画素が持つ輝度値及び色差値の少なくとも一方の平均値と分散値の組み合わせをブロック特徴量として、各小ブロック毎に算出する第2の算出手段と、
前記第2の算出手段により算出された前記ブロック特徴量が規定値より大きな値を持つ小ブロックは孤立小ブロックとして残し、前記ブロック特徴量が前記規定値以下の値を持つ小ブロックのうち、前記ブロック特徴量が近似した値を持つ隣接する小ブロック又は前記セグメントと統合して新たなセグメントを作成する第2のセグメント作成手段と
を更に有し、前記符号化手段は、前記第2のセグメント作成手段から出力される信号を入力として受け、前記新たなセグメント単位及び前記孤立小ブロック単位に所定の符号化を行って符号化データを出力することを特徴とする請求項1記載のセグメント単位画像符号化装置。 - 供給される画像信号の2次元画像を複数のブロックに分割してブロック単位に符号化するようにコンピュータを動作させるセグメント単位画像符号化プログラムであって、
前記コンピュータを、
供給される画像信号の2次元画像を第1の形状サイズのブロックの単位で分割する第1の分割手段と、
前記第1の分割手段により分割された前記ブロック内の画素が持つ輝度値及び色差値の少なくとも一方の平均値と分散値の組み合わせをブロック特徴量として、各ブロック毎に算出する第1の算出手段と、
前記ブロック特徴量が規定値より大きな値を持つブロックは孤立ブロックとして残し、前記ブロック特徴量が前記規定値以下の値を持つブロックのうち、前記ブロック特徴量が近似した値を持つ隣接ブロック同士を統合してセグメントとして作成する第1のセグメント作成手段と、
前記第1のセグメント作成手段から出力される信号を入力として受け、前記セグメント単位及び前記孤立ブロック単位に所定の符号化を行って符号化データを出力する符号化手段として機能させることを特徴とするセグメント単位画像符号化プログラム。 - 前記コンピュータを、
前記第1のセグメント作成手段から出力される前記孤立ブロックを、前記第1の形状サイズより小である第2の形状サイズの小ブロックの単位で分割する第2の分割手段と、
前記第2の分割手段により分割された前記小ブロック内の画素が持つ輝度値及び色差値の少なくとも一方の平均値と分散値の組み合わせをブロック特徴量として、各小ブロック毎に算出する第2の算出手段と、
前記第2の算出手段により算出された前記ブロック特徴量が規定値より大きな値を持つ小ブロックは孤立小ブロックとして残し、前記ブロック特徴量が前記規定値以下の値を持つ小ブロックのうち、前記ブロック特徴量が近似した値を持つ隣接する小ブロック又は前記セグメントと統合して新たなセグメントを作成する第2のセグメント作成手段として更に機能させ、前記符号化手段を、前記第2のセグメント作成手段から出力される信号を入力として受け、前記新たなセグメント単位及び前記孤立小ブロック単位に所定の符号化を行って符号化データを出力するように機能させることを特徴とする請求項1記載のセグメント単位画像符号化プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003356693A JP4100321B2 (ja) | 2003-10-16 | 2003-10-16 | セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003356693A JP4100321B2 (ja) | 2003-10-16 | 2003-10-16 | セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005123895A JP2005123895A (ja) | 2005-05-12 |
| JP4100321B2 true JP4100321B2 (ja) | 2008-06-11 |
Family
ID=34613856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003356693A Expired - Fee Related JP4100321B2 (ja) | 2003-10-16 | 2003-10-16 | セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4100321B2 (ja) |
-
2003
- 2003-10-16 JP JP2003356693A patent/JP4100321B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005123895A (ja) | 2005-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2664746T3 (es) | Predicción eficaz usando codificación de particiones | |
| US7986810B2 (en) | Mesh based frame processing and applications | |
| US8098733B2 (en) | Multi-directional motion estimation using parallel processors and pre-computed search-strategy offset tables | |
| US8351685B2 (en) | Device and method for estimating depth map, and method for generating intermediate image and method for encoding multi-view video using the same | |
| EP1639829B1 (en) | Optical flow estimation method | |
| US6418168B1 (en) | Motion vector detection apparatus, method of the same, and image processing apparatus | |
| JP2671820B2 (ja) | 両方向予測方法及び両方向予測装置 | |
| JP2003018604A (ja) | 画像信号符号化方法、画像信号符号化装置および記録媒体 | |
| JP2009147807A (ja) | 画像処理装置 | |
| JPH08242458A (ja) | 動きベクトル検出方法 | |
| CN101924873A (zh) | 图像处理设备和图像处理方法 | |
| CN100481944C (zh) | 对数字化图像实施由计算机支持的运动补偿的方法和装置 | |
| WO2005122593A1 (ja) | 動画符号化方法および動画復号方法 | |
| WO2000005899A1 (fr) | Systeme de codage d'images | |
| JP2022103284A (ja) | 映像符号化装置、映像復号装置、及びこれらのプログラム | |
| JPH089379A (ja) | 動きベクトル検出方法 | |
| JP4523024B2 (ja) | 画像符号化装置および画像符号化方法 | |
| JP3175914B2 (ja) | 画像符号化方法および画像符号化装置 | |
| JP2010258576A (ja) | シーンチェンジ検出装置および映像記録装置 | |
| JP4100321B2 (ja) | セグメント単位画像符号化装置及びセグメント単位画像符号化プログラム | |
| JP2004096557A (ja) | 画像処理装置及び画像処理方法 | |
| US20070047643A1 (en) | Video data compression | |
| JP4671696B2 (ja) | 動きベクトル検出装置 | |
| JPH08242454A (ja) | グローバル動きパラメタ検出方法 | |
| JP2000165909A (ja) | 画像圧縮処理方法及び画像圧縮処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060331 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080310 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110328 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120328 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |