JP4026604B2 - 車両用駆動装置の制御装置 - Google Patents
車両用駆動装置の制御装置 Download PDFInfo
- Publication number
- JP4026604B2 JP4026604B2 JP2004052211A JP2004052211A JP4026604B2 JP 4026604 B2 JP4026604 B2 JP 4026604B2 JP 2004052211 A JP2004052211 A JP 2004052211A JP 2004052211 A JP2004052211 A JP 2004052211A JP 4026604 B2 JP4026604 B2 JP 4026604B2
- Authority
- JP
- Japan
- Prior art keywords
- transmission
- state
- switching
- stepped
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 691
- 239000000446 fuel Substances 0.000 claims abstract description 240
- 230000007246 mechanism Effects 0.000 claims abstract description 224
- 230000008859 change Effects 0.000 claims description 108
- 238000010586 diagram Methods 0.000 claims description 37
- 230000007423 decrease Effects 0.000 claims description 5
- 230000006866 deterioration Effects 0.000 claims description 4
- 230000000670 limiting effect Effects 0.000 claims description 3
- 230000002829 reductive effect Effects 0.000 description 16
- 238000006243 chemical reaction Methods 0.000 description 9
- 230000001133 acceleration Effects 0.000 description 6
- 230000007935 neutral effect Effects 0.000 description 6
- 230000002441 reversible effect Effects 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 239000003921 oil Substances 0.000 description 5
- 238000010248 power generation Methods 0.000 description 5
- 230000005611 electricity Effects 0.000 description 4
- 239000003054 catalyst Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000009347 mechanical transmission Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 239000006247 magnetic powder Substances 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000001020 rhythmical effect Effects 0.000 description 1
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Structure Of Transmissions (AREA)
Description
また、好適には、請求項12にかかる発明では、前記切換制御手段は、前記エンジンの実際の出力トルクが予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである。このようにすれば、例えばエンジンの出力トルクが比較的高トルク側に設定された所定値を越えると、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値を小さくできてその電動機或いはそれを含む車両の駆動装置が一層小型化される。また、上記所定値は、燃料消費率に基づくことなく前記変速状態切換型変速機構を有段変速状態に切り換える必要があるエンジンの高トルク領域例えば前記変速状態切換型変速機構を電気的な無段変速機として作動させられない電動機の定格出力に基づいて定められたエンジン出力トルクの制限値を越えるようなエンジンの高トルク領域を判定するために予め設定された値である。
また、好適には、前記切換制御手段は、前記エンジンの実際の出力トルクが予め設定された所定値を越えたときに前記変速状態切換型変速機構の無段変速状態を禁止するものである。このようにすれば、例えばエンジンの出力トルクが比較的高トルク側に設定された所定値を越えると、変速状態切換型変速機構の無段変速状態が禁止されて、電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値が小さくされるので、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて、その電動機或いはそれを含む車両の駆動装置が一層小型化される。
また、好適には、請求項13にかかる発明では、前記切換制御手段は、前記エンジンの実際の回転速度が予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである。このようにすれば、例えばエンジンの回転速度が比較的高回転側に設定された所定値を越えると、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値を小さくできてその電動機或いはそれを含む車両の駆動装置が一層小型化される。また、上記所定値は、燃料消費率に基づくことなく前記変速状態切換型変速機構を有段変速状態に切り換える必要があるエンジンの高回転領域例えば前記変速状態切換型変速機構を電気的な無段変速機として作動させられない電動機の定格出力に基づいて定められたエンジン回転速度の制限値を越えるようなエンジンの高回転領域を判定するために予め設定された値である。
また、好適には、前記切換制御手段は、前記エンジンの実際の回転速度が予め設定された所定値を越えたときに前記変速状態切換型変速機構の無段変速状態を禁止するものである。このようにすれば、例えばエンジンの回転速度が比較的高回転側に設定された所定値を越えると、変速状態切換型変速機構の無段変速状態が禁止されて、電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値が小さくされるので、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて、その電動機或いはそれを含む車両の駆動装置が一層小型化される。
また、好適には、請求項14にかかる発明では、前記切換制御手段は、前記エンジンの実際の出力が予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである。このようにすれば、例えばエンジンの出力が比較的高出力側に設定された所定値を越えると、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値を小さくできてその電動機或いはそれを含む車両の駆動装置が一層小型化される。また、上記所定値は、燃料消費率に基づくことなく前記変速状態切換型変速機構を有段変速状態に切り換える必要があるエンジンの高出力領域例えば前記変速状態切換型変速機構を電気的な無段変速機として作動させられない電動機の定格出力に基づいて定められたエンジン出力の制限値を越えるようなエンジンの高出力領域を判定するために予め設定された値である。
また、好適には、前記切換制御手段は、前記エンジンの実際の出力が予め設定された所定値を越えたときに前記変速状態切換型変速機構の無段変速状態を禁止するものである。このようにすれば、例えばエンジンの出力が比較的高出力側に設定された所定値を越えると、変速状態切換型変速機構の無段変速状態が禁止されて、電気的な無段変速機として作動させる場合の電動機が伝える電気的エネルギの最大値が小さくされるので、専ら機械的な動力伝達経路でエンジンの出力が駆動輪へ伝達されて、その電動機或いはそれを含む車両の駆動装置が一層小型化される。
10、70:変速状態切換型変速機構(駆動装置)
12:トランスミッションケース(非回転部材)
16:動力分配機構
18:伝達部材
20、72:自動変速部(有段式自動変速機)
24:第1遊星歯車装置(シングルピニオン型遊星歯車装置)
38:駆動輪
50:切換制御手段
M1:第1電動機
M2:第2電動機
C0:切換クラッチ(作動状態切換装置)
B0:切換ブレーキ(作動状態切換装置)
Claims (23)
- エンジンの出力を駆動輪へ伝達する車両用駆動装置の制御装置であって、
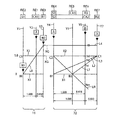
動力分配機構と、該動力分配機構の回転要素のうちの1つに動力伝達可能に連結された第1電動機と、駆動輪に動力伝達可能とされた第2電動機と、該動力分配機構の作動状態を切り換える作動状態切換装置とを備え、該第1電動機および第2電動機の運転状態が制御されることにより前記エンジンからの動力を無段階に変速して機械的に後段へ伝達するとともに前記第1電動機から第2電動機への電気パスを介して電気的に後段へ伝達する電気的な無段変速機として作動可能な無段変速状態と、前記動力分配機構の差動を制限することにより前記エンジンからの動力を所定の変速比で専ら機械的に後段へ伝達する有段の変速機として作動可能な有段変速状態とに、切り換え可能な変速状態切換型変速機構と、
前記無段変速状態での車両の燃料消費率と、前記電気パスによる損失のないことによる寄与分と前記エンジンの動作点がその最適燃費線からずれることによる低下分とを含む前記有段変速状態での車両の燃料消費率の何れが良いかに基づいて前記変速状態切換型変速機構を前記無段変速状態と前記有段変速状態とのいずれかに選択的に切り換える切換制御手段と
を、含むことを特徴とする車両用駆動装置の制御装置。 - 前記燃料消費率は車両状態から逐次算出されるものである請求項1の車両用駆動装置の制御装置。
- 前記車両状態から逐次算出される燃料消費率は、予め記憶された関係から求められるエンジンの燃料消費率に基づいて算出されるものである請求項2の車両用駆動装置の制御装置。
- 前記車両状態から逐次算出される燃料消費率は、エンジンから駆動輪への伝達効率が考慮されるものである請求項2または3の車両用駆動装置の制御装置。
- 前記伝達効率は車両の走行抵抗によって変化するものである請求項4の車両用駆動装置の制御装置。
- 前記伝達効率は車速によって変化するものである請求項4または5の車両用駆動装置の制御装置。
- 前記伝達効率は車両の駆動力関連値によって変化するものである請求項4乃至6のいずれか1の車両用駆動装置の制御装置。
- 前記無段変速状態および前記有段変速状態の何れでの走行が燃料消費率が良いかにより該無段変速状態或いは該有段変速状態とするための領域が設定された予め記憶された関係から現在の車両状態に基づいて前記変速状態切換型変速機構が前記無段変速状態と前記有段変速状態とのいずれかに選択的に切り換えられるものである請求項1の車両用駆動装置の制御装置。
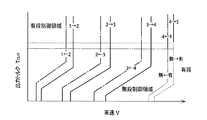
- 前記切換制御手段は、実際の車速が予め設定された高速走行判定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至8のいずれか1の車両用駆動装置の制御装置。
- 前記切換制御手段は、車両の駆動力関連値が予め設定された高出力走行判定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至9のいずれか1の車両用駆動装置の制御装置。
- 前記切換制御手段は、前記変速状態切換型変速機構を前記電気的な無段変速状態とするための制御機器の機能低下を判定する故障判定条件が成立した場合に前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至10のいずれか1の車両用駆動装置の制御装置。
- 前記切換制御手段は、前記エンジンの実際の出力トルクが予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至8のいずれか1の車両用駆動装置の制御装置。
- 前記切換制御手段は、前記エンジンの実際の回転速度が予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至8、および12のいずれか1の車両用駆動装置の制御装置。
- 前記切換制御手段は、前記エンジンの実際の出力が予め設定された所定値を越えたときに前記変速状態切換型変速機構を前記有段変速状態とするものである請求項1乃至8、12、および13のいずれか1の車両用駆動装置の制御装置。
- 前記変速状態切換型変速機構は、前記エンジンに連結された第1要素と、第1電動機に連結された第2要素と、第2電動機および伝達部材に連結された第3要素とを有する動力分配機構を備え、
該動力分配機構は、前記変速状態切換型変速機構を前記無段変速状態および前記有段変速状態のいずれかの状態に切換可能とするための作動状態切換装置を有し、
前記切換制御手段は、該作動状態切換装置を制御することで前記無段変速状態と前記有段変速状態とを選択的に切り換えるものである請求項1乃至14のいずれか1の車両用駆動装置の制御装置。 - 前記作動状態切換装置は、前記第1要素乃至第3要素のうちのいずれか2つを相互におよび/または該第2要素を非回転部材に連結する係合装置であり、
前記切換制御手段は、前記係合装置を解放して該第1要素、第2要素、および第3要素を相互に相対回転可能とすることにより前記無段変速状態とし、前記係合装置を係合して該第1要素、第2要素、および第3要素のうちの少なくとも2つを相互に連結するか或いは該第2要素を非回転状態とすることにより前記有段変速状態とするものである請求項15の車両用駆動装置の制御装置。 - 前記動力分配機構は遊星歯車装置であり、
前記第1要素は該遊星歯車装置のキャリヤであり、
前記第2要素は該遊星歯車装置のサンギヤであり、
前記第3要素は該遊星歯車装置のリングギヤであり、
前記係合装置は、前記キャリヤ、サンギヤ、リングギヤのうちのいずれか2つを相互に連結するクラッチおよび/または該サンギヤを非回転部材に連結するブレーキを備えたものである請求項16の車両用駆動装置の制御装置。 - 前記遊星歯車装置はシングルピニオン型遊星歯車装置である請求項17の車両用駆動装置の制御装置。
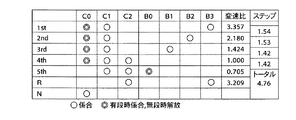
- 前記切換制御手段は、前記シングルピニオン型遊星歯車装置を変速比が1である変速機とするために前記キャリヤとサンギヤを相互に連結するか、或いは前記シングルピニオン型遊星歯車装置を変速比が1より小さい増速変速機とするために前記サンギヤを非回転状態とするように前記係合装置を制御するものである請求項18の車両用駆動装置の制御装置。
- 前記変速状態切換型変速機構は、前記伝達部材と前記駆動輪との間において前記動力分配機構と直列に設けられた自動変速機を含み、
該自動変速機の変速比に基づいて前記変速状態切換型変速機構の変速比が形成されるものである請求項15乃至19のいずれか1の車両用駆動装置の制御装置。 - 前記動力分配機構の変速比と前記自動変速機の変速比とに基づいて前記変速状態切換型変速機構の総合変速比が形成されるものである請求項20の車両用駆動装置の制御装置。
- 前記自動変速機は有段式自動変速機であり、該有段式自動変速機の変速は、予め記憶された変速線図に基づいて実行されるものである請求項20または21の車両用駆動装置の制御装置。
- 前記切換制御手段は、前記車両の燃料消費率の比較により前記変速状態切換型変速機構を前記無段変速状態と前記有段変速状態とのいずれかに切り換えるとともに、車両状態が予め設定された状態となった場合は、前記車両の燃料消費率に基づくことなく前記変速状態切換型変速機構を前記無段変速状態から前記有段変速状態へ切り換えるものである請求項1乃至21のいずれか1の車両用駆動装置の制御装置。
Priority Applications (18)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004052211A JP4026604B2 (ja) | 2004-02-26 | 2004-02-26 | 車両用駆動装置の制御装置 |
| US11/019,337 US7822524B2 (en) | 2003-12-26 | 2004-12-23 | Vehicular drive system |
| CN2011100791521A CN102166946B (zh) | 2003-12-26 | 2004-12-24 | 车辆用驱动系统以及控制该车辆用驱动系统的方法和装置 |
| CN2004800421005A CN1926356B (zh) | 2003-12-26 | 2004-12-24 | 车辆用驱动系统 |
| KR1020077025344A KR20070112304A (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치, 상기 제어 방법 및 제어장치 |
| KR1020077025342A KR100882176B1 (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치 |
| EP11002541.8A EP2375103B1 (en) | 2003-12-26 | 2004-12-24 | Vehicular drive system |
| KR1020067015144A KR100887204B1 (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치 및 그 제어 방법 |
| PCT/JP2004/019743 WO2005064199A1 (ja) | 2003-12-26 | 2004-12-24 | 車両用駆動装置、その制御方法および制御装置 |
| CN201110079155.5A CN102166950B (zh) | 2003-12-26 | 2004-12-24 | 车辆用驱动系统以及控制该车辆用驱动系统的方法和装置 |
| KR1020077025340A KR100863172B1 (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치 |
| EP04808093A EP1701061B1 (en) | 2003-12-26 | 2004-12-24 | Drive device for vehicle, method of controlling the device, and device for controlling the device |
| KR1020077025345A KR20070112430A (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치, 상기 제어 방법 및 제어장치 |
| KR1020077025341A KR100863173B1 (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치 |
| KR1020077025343A KR100882177B1 (ko) | 2003-12-26 | 2004-12-24 | 차량용 구동장치의 제어장치 |
| US12/269,633 US7941259B2 (en) | 2003-12-26 | 2008-11-12 | Vehicular drive system |
| US12/269,591 US20090075774A1 (en) | 2003-12-26 | 2008-11-12 | Vehicular drive system |
| US12/269,659 US7848858B2 (en) | 2003-12-26 | 2008-11-12 | Vehicular drive system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004052211A JP4026604B2 (ja) | 2004-02-26 | 2004-02-26 | 車両用駆動装置の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005240917A JP2005240917A (ja) | 2005-09-08 |
| JP2005240917A5 JP2005240917A5 (ja) | 2007-03-22 |
| JP4026604B2 true JP4026604B2 (ja) | 2007-12-26 |
Family
ID=35022864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004052211A Expired - Lifetime JP4026604B2 (ja) | 2003-12-26 | 2004-02-26 | 車両用駆動装置の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4026604B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4293176B2 (ja) * | 2005-10-20 | 2009-07-08 | トヨタ自動車株式会社 | 動力出力装置及びこれを搭載する車両並びに動力出力装置の制御方法 |
| JP2007118720A (ja) * | 2005-10-26 | 2007-05-17 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP4358178B2 (ja) | 2005-10-26 | 2009-11-04 | トヨタ自動車株式会社 | エンジンの始動制御装置 |
| JP4052329B2 (ja) | 2005-10-26 | 2008-02-27 | トヨタ自動車株式会社 | 自動変速機の変速制御装置 |
| JP4600421B2 (ja) * | 2007-04-25 | 2010-12-15 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP2010036708A (ja) * | 2008-08-04 | 2010-02-18 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2010052497A (ja) * | 2008-08-26 | 2010-03-11 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP4600549B2 (ja) | 2008-08-29 | 2010-12-15 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP5229385B2 (ja) | 2009-05-19 | 2013-07-03 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| CN104968548B (zh) * | 2013-01-31 | 2017-06-23 | 丰田自动车株式会社 | 混合动力车辆的控制装置 |
-
2004
- 2004-02-26 JP JP2004052211A patent/JP4026604B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005240917A (ja) | 2005-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4155230B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4207920B2 (ja) | 車両用駆動装置 | |
| JP4046103B2 (ja) | 車両用駆動装置の制御装置 | |
| JP2005264762A (ja) | 車両用駆動装置の制御装置 | |
| JP2007001390A (ja) | 車両用駆動装置の制御装置 | |
| JP2006298067A (ja) | 動力伝達装置 | |
| JP4134954B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4228942B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4168954B2 (ja) | 車両用駆動装置の制御装置 | |
| JP2006009942A (ja) | 車両用駆動装置の制御装置 | |
| JP4144561B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4311358B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4026604B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4069903B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4442398B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4151614B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4410655B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4225253B2 (ja) | 車両用駆動装置の制御装置 | |
| JP2009227096A (ja) | 車両用動力伝達装置の制御装置 | |
| JP4151735B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4182917B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4214963B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4483892B2 (ja) | ハイブリッド車両用駆動装置の制御装置 | |
| JP4289242B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4039384B2 (ja) | 車両用駆動装置の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070918 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071001 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101019 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4026604 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101019 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101019 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111019 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111019 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121019 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121019 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131019 Year of fee payment: 6 |
|
| EXPY | Cancellation because of completion of term |