JP3979367B2 - 光制御デバイス、空間光変調装置及びプロジェクタ - Google Patents
光制御デバイス、空間光変調装置及びプロジェクタ Download PDFInfo
- Publication number
- JP3979367B2 JP3979367B2 JP2003312753A JP2003312753A JP3979367B2 JP 3979367 B2 JP3979367 B2 JP 3979367B2 JP 2003312753 A JP2003312753 A JP 2003312753A JP 2003312753 A JP2003312753 A JP 2003312753A JP 3979367 B2 JP3979367 B2 JP 3979367B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- movable mirror
- resistance value
- electrode
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005286 illumination Methods 0.000 claims description 26
- 230000003287 optical effect Effects 0.000 claims description 15
- 230000014509 gene expression Effects 0.000 claims description 13
- 229910021417 amorphous silicon Inorganic materials 0.000 description 10
- 230000007423 decrease Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- 239000000758 substrate Substances 0.000 description 8
- 229910004298 SiO 2 Inorganic materials 0.000 description 6
- 239000011521 glass Substances 0.000 description 6
- 239000003990 capacitor Substances 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 239000004020 conductor Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 210000001747 pupil Anatomy 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 2
- 229910002113 barium titanate Inorganic materials 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images










Landscapes
- Mechanical Light Control Or Optical Switches (AREA)
Description
4RL≦RC≦RD/4 (1)
さらに好ましくは、以下の条件式を満足することが望ましい。
RC=(RL×RD)1/2 (2)
これらの条件式により、駆動用電極と可動部との間の電位差の可変範囲をより大きくすることができる。これにより、入力信号に応じてさらに正確に可動部の駆動を制御できる光制御デバイスを得られる。さらに好ましくは、導電率可変部の最小抵抗値RLと、最大抵抗値RDとは、少なくとも2桁以上の差を有するような値であることが望ましい。これにより、駆動用電極と可動部との間の電位差の可変範囲を十分に確保し、可動部の駆動を正確に制御することができる。
100GΩ/(100GΩ+0.01MΩ)×100V≒99.99999V
従って、制御光Lの入射によって、駆動用電極210と可動ミラー108との間に約99.99999Vの電位差を生じる。
100GΩ/(100GΩ+100MΩ)×100V≒99.9V
従って、制御光Lを入射させないとき、駆動用電極210と可動ミラー108との間に約99.9Vの電位差を生じる。
99.99999V−99.9V=0.09999V
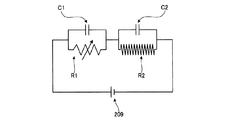
電源209からの印加電圧が100Vのとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約0.1Vである。この場合、電源209による印加電圧の僅か0.1%相当のみを、駆動用電極210と可動ミラー108との間の電位差の変化量とすることが可能となる。光制御可動ミラーデバイス900は、駆動用電極210と可動ミラー108との間の電位差により生じる静電力Fを制御して可動ミラー108を駆動する。駆動用電極210と可動ミラー108との間の電位差の変化量が僅か0.1Vであると、制御光Lの光量が最大のときに発生する静電力Fも微小である。発生する静電力Fが微小であると、可動ミラー108を駆動することができない場合がある。
RL≦RC≦RD (3)
RL:RC=m:1(但し、0<m≦1) (4)
RC:RD=n:1(但し、0<n≦1) (5)
なお、導電率可変部203が最小抵抗値RLとなるのは、透明電極202に入射させる制御光Lの光量が最大のときである。また、導電率可変部203が最大抵抗値RDとなるのは、透明電極202に制御光Lを入射させないときである。
RL:RC=k:1 (6)
RC:RD=k:1 (7)
式(6)と式(7)とから、式(2)を導き出すことができる。
RC=(RL×RD)1/2 (2)
RC/(RC+RL)×100V=1MΩ/(1MΩ+0.01MΩ)×100V≒99.01V
RC/(RC+RD)×100V=1MΩ/(1MΩ+100MΩ)×100V≒0.99V
駆動用電極210と可動ミラー108との間の電位差の変化量は、以下の計算式により算出できる。
99.01V−0.99V=98.02V
従って、抵抗値RC=1MΩであるとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約98.02Vである。
RL≦RC≦RD (3)
まず、式(3)において、抵抗部220の抵抗値RCが最小である場合、以下の式(7)が成り立つ。
RC=RL (7)
このとき、RL:RC=1:1であるから、式(4)においてm=1である。
RC/(RC+RL)×100V=0.01MΩ/(0.01MΩ+0.01MΩ)×100V=50V
RC/(RC+RD)×100V=0.01MΩ/(0.01MΩ+100MΩ)×100V≒0.01V
駆動用電極210と可動ミラー108との間の電位差の変化量は、以下の計算式により算出できる。
50V−0.01V=49.99V
従って、抵抗値RC=0.01MΩであるとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約49.99Vである。
RC=RD (8)
このとき、RC:RD=1:1であるから、式(5)においてn=1である。そして、導電率可変部203の最大抵抗値RDは100MΩであるので、式(8)から、RC=RD=100MΩである。電源209により、透明電極202と可動ミラー108との間に印加される電圧が100Vであるとする。透明電極202に制御光Lを入射させることによって導電率可変部203の抵抗値がRL=0.01MΩであるとき、抵抗部220に印加される電圧は、以下の計算式により算出される。
RC/(RC+RL)×100V=100MΩ/(100MΩ+0.01MΩ)×100V≒99.99V
RC/(RC+RD)×100V=100MΩ/(100MΩ+100MΩ)×100V=50V
駆動用電極210と可動ミラー108との間の電位差の変化量は、以下の計算式により算出できる。
99.99V−50V=49.99V
従って、抵抗値RC=100MΩであるとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約49.99Vである。
4RL≦RC≦RD/4 (1)
まず、式(1)において、抵抗部220の抵抗値RCが最小である場合、以下の式(9)が成り立つ。
RC=4RL (9)
このとき、RL:RC=1:4であるから、式(4)においてm=1/4である。
RC/(RC+RL)×100V=0.04MΩ/(0.04MΩ+0.01MΩ)×100V=80V
RC/(RC+RD)×100V=0.04MΩ/(0.04MΩ+100MΩ)×100V≒0.04V
駆動用電極210と可動ミラー108との間の電位差の変化量は、以下の計算式により算出できる。
80V−0.04V=79.96V
従って、抵抗値RC=0.04MΩであるとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約79.96Vである。
RC=RD/4 (10)
このとき、RC:RD=1:4であるから、上記の式(5)においてn=1/4である。式(10)から、RC=RD/4=25MΩである。電源209により、透明電極202と可動ミラー108との間に印加される電圧が100Vであるとする。透明電極202に制御光Lを入射させることによって導電率可変部203の抵抗値がRL=0.01MΩであるとき、抵抗部220に印加される電圧は、以下の計算式により算出される。
RC/(RC+RL)×100V=25MΩ/(25MΩ+0.01MΩ)×100V≒99.96V
RC/(RC+RD)×100V=25MΩ/(25MΩ+100MΩ)×100V=20V
駆動用電極210と可動ミラー108との間の電位差の変化量は、以下の計算式により算出できる。
99.96V−20V=79.96V
従って、抵抗値RC=25MΩであるとき、駆動用電極210と可動ミラー108との間の電位差の変化量は、約79.96Vである。
RL≦RC≦RD (3)
4RL≦RC≦RD/4 (1)
さらに好ましくは、式(2)に基づいて抵抗値RCを定められた抵抗部220を用いることにより、電源209による印加電圧の約98%相当を、駆動用電極210と可動ミラー108との間の電位差の変化量とすることができる。
RC=(RL×RD)1/2 (2)
RL≦RC≦RD (3)
Claims (5)
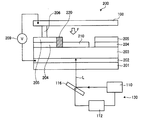
- 制御光を供給する制御光用光学系と、
光学的に透明な透明電極と、
前記透明電極の上に設けられ、前記透明電極を透過した前記制御光の光量に応じて電気的な抵抗値が可変である導電率可変部と、
前記導電率可変部上に設けられた駆動用電極と、
所定の位置に移動可能な可動部と、
前記透明電極と前記可動部との間に所定の電圧を印加する電源と、
前記駆動用電極と前記可動部との間に設けられている所定の抵抗値の抵抗部と、を有し、
前記所定の抵抗値は、前記導電率可変部の最小抵抗値と最大抵抗値との間のいずれかの値であって、
前記制御光を前記透明電極に入射させることにより、前記駆動用電極と前記可動部との間に前記導電率可変部の抵抗値に対応する所定の力を発生させ、
前記可動部は、前記所定の力により移動することを特徴とする光制御デバイス。 - 前記導電率可変部の前記最小抵抗値をRL、前記導電率可変部の前記最大抵抗値をRD、前記抵抗部の抵抗値をRC、とそれぞれしたときに、以下の条件式を満足することを特徴とする請求項1に記載の光制御デバイス。
4RL≦RC≦RD/4 - 前記導電率可変部の前記最小抵抗値をRL、前記導電率可変部の前記最大抵抗値をRD、前記抵抗部の抵抗値をRC、とそれぞれしたときに、以下の条件式を満足することを特徴とする請求項1又は2に記載の光制御デバイス。
RC=(RL×RD)1/2 - 所定の位置に移動可能な可動ミラーを備えた複数の光制御可動ミラーデバイスを有し、
前記光制御可動ミラーデバイスは、請求項1〜3のいずれか一項に記載の光制御デバイスであって、
前記可動部は、前記可動ミラーであることを特徴とする空間光変調装置。 - 照明光を供給する照明光用光源部と、
前記照明光用光源部からの前記照明光を画像信号に応じて変調する空間光変調装置と、
前記空間光変調装置で変調された光を投写する投写レンズと、を有し、
前記空間光変調装置は、請求項4に記載の空間光変調装置であることを特徴とするプロジェクタ。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003312753A JP3979367B2 (ja) | 2003-09-04 | 2003-09-04 | 光制御デバイス、空間光変調装置及びプロジェクタ |
| TW093122128A TWI294976B (en) | 2003-08-18 | 2004-07-23 | Method for controlling optical control device, optical control device, spatial light modulation device, and projector |
| US10/918,469 US6937378B2 (en) | 2003-08-18 | 2004-08-16 | Optically controlled device, method of controlling the optically controlled device, spatial light modulator, and projector |
| SG200404700A SG109576A1 (en) | 2003-08-18 | 2004-08-17 | Optically controlled device, method of controlling the optically controlled device, spatial light modulator, and projector |
| CNB2004100585717A CN100410805C (zh) | 2003-08-18 | 2004-08-18 | 光控制器件及其控制方法、空间光调制装置及投影机 |
| DE602004002159T DE602004002159T2 (de) | 2003-08-18 | 2004-08-18 | Optisch kontrollierte Einheit, Methode zur Steuerung der optisch kontrollierten Einheit, räumlicher Lichtmodulator und Projektor |
| KR1020040065113A KR100637954B1 (ko) | 2003-08-18 | 2004-08-18 | 광 제어 장치의 제어 방법, 광 제어 장치, 공간 광 변조 장치 및 프로젝터 |
| EP04254962A EP1508830B1 (en) | 2003-08-18 | 2004-08-18 | Optically controlled device, method of controlling the optically controlled device, spatial light modulator, and projector |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003312753A JP3979367B2 (ja) | 2003-09-04 | 2003-09-04 | 光制御デバイス、空間光変調装置及びプロジェクタ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005084103A JP2005084103A (ja) | 2005-03-31 |
| JP3979367B2 true JP3979367B2 (ja) | 2007-09-19 |
Family
ID=34413918
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003312753A Expired - Fee Related JP3979367B2 (ja) | 2003-08-18 | 2003-09-04 | 光制御デバイス、空間光変調装置及びプロジェクタ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3979367B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022245572A1 (en) * | 2021-05-17 | 2022-11-24 | Teledyne Micralyne Inc. | Mems-based modulation and beam control systems and methods |
-
2003
- 2003-09-04 JP JP2003312753A patent/JP3979367B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005084103A (ja) | 2005-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6937378B2 (en) | Optically controlled device, method of controlling the optically controlled device, spatial light modulator, and projector | |
| US7158278B2 (en) | Display device based on bistable electrostatic shutter | |
| US7447891B2 (en) | Light modulator with concentric control-electrode structure | |
| EP3178783B1 (en) | Micromechanical device having a structure tiltable by a quasi-static piezoelectric actuation | |
| US7349145B2 (en) | Optical deflection device and image projection display apparatus using the same | |
| JPH11258528A (ja) | コントラスト比を改良するため小さくされたマイクロミラーのミラー・ギャップ | |
| JP2002287047A (ja) | 光スイッチング素子、光スイッチングデバイス、それらの製造方法および画像表示装置 | |
| US20070064295A1 (en) | Light modulator with tunable optical state | |
| JP2004078136A (ja) | 光偏向方法並びに光偏向装置及びその光偏向装置の製造方法並びにその光偏向装置を具備する光情報処理装置及び画像形成装置及び画像投影表示装置及び光伝送装置 | |
| JP2008295174A (ja) | 揺動装置、同装置を用いた光走査装置、映像表示装置、及び揺動装置の制御方法 | |
| JP2007279741A (ja) | 高解像度スキャニングディスプレイシステム | |
| JP2016225612A5 (ja) | ||
| US20070257872A1 (en) | Digital Image Projection Methods and Apparatus Thereof | |
| JP3979367B2 (ja) | 光制御デバイス、空間光変調装置及びプロジェクタ | |
| JP2005345938A (ja) | 透過型光変調素子及び透過型光変調アレイ素子 | |
| US20080218842A1 (en) | Method of Repairing Micromirrors in Spatial Light Modulators | |
| JP4379007B2 (ja) | 空間光変調装置及びプロジェクタ | |
| US20070177113A1 (en) | Digital image projection methods and apparatus thereof | |
| JP4026558B2 (ja) | 空間光変調装置及びプロジェクタ | |
| JP4042648B2 (ja) | 光制御デバイスの制御方法、光制御デバイス、空間光変調装置及びプロジェクタ | |
| JP2004085700A (ja) | ミラーデバイス、光スイッチ、電子機器およびミラーデバイス駆動方法 | |
| KR970008384B1 (ko) | 투사형 화상표시장치의 광변조수단 | |
| US20060193028A1 (en) | Method of repairing micromirrors in spatial light modulators | |
| US20050041279A1 (en) | Hingeless mirror decice and method of controlling the same | |
| JP2005010193A (ja) | 空間光変調装置の制御方法、空間光変調装置、及びプロジェクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050628 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070403 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070601 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070618 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100706 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110706 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110706 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120706 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120706 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130706 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |