JP3718312B2 - 機械高測定装置 - Google Patents
機械高測定装置 Download PDFInfo
- Publication number
- JP3718312B2 JP3718312B2 JP02332297A JP2332297A JP3718312B2 JP 3718312 B2 JP3718312 B2 JP 3718312B2 JP 02332297 A JP02332297 A JP 02332297A JP 2332297 A JP2332297 A JP 2332297A JP 3718312 B2 JP3718312 B2 JP 3718312B2
- Authority
- JP
- Japan
- Prior art keywords
- reflecting member
- telescope
- prism
- surveying instrument
- center
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、例えば測距機、トータルステーションなどの原点と基点との鉛直距離、即ち機械高を測定する機械高測定方法に関する。
【0002】
【従来の技術】
近年測量機の電子化により、光波を用いて瞬時に測距作業を行なえる光波測距装置が開発されている。このような測距作業は、測量機内の既知点を原点とし、この原点を地上測点(以下基点という)の鉛直線上に設置して行なわれる。測距時のデータから実際の地点高度を算出するには、機械高が必要である。
【0003】
従来機械高の測定は、例えば基点上に設置された測量機本体の側面カバーの機械高測定マーク位置に係止金具を取り付け、巻尺の一端を係止金具に引掛け、他端を鉛直方向に地面まで延ばして、巻尺の目盛りを読み取ることにより行なわれていた。
【0004】
【発明が解決しようとする課題】
しかし、このように測量機の側面に巻尺を引掛けて測定する場合、巻尺の測定点が基点から離れているので誤差が生じやすい。また巻尺による測定の精度は低く、光波測距装置による高い精度の測定を行なっても、演算結果の精度は粗くなる。
【0005】
本発明は、この様な問題点に鑑みてなされたものであり、基点からの高い精度の機械高を容易に得る機械高測定方法を提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明による機械高測定方法は、光波測距測量機の望遠鏡の前方に設けられ、この光波測距測量機の中心から出射された測定光の光路を所定の角度に偏向する第1の反射部材と、基点上に所定高さで設置され、第1の反射部材からの出射光を反射して光路に沿って光波測距測量機に帰還させる第2の反射部材とを備えた機械高測定アダプタを用いて、光波測距測量機の測量機中心から第1の反射部材を介した第2の反射部材までの光波距離が測定され、基点から測量機までの高さが、光波距離と測量機中心から第1の反射部材までの距離と偏角とから演算された測量機中心から第2の反射部材までの高さと、第2の反射部材の高さに基づいて求められることを特徴とする。
【0007】
機械高測定方法において、好ましくは、測量機中心から第1の反射部材までを第1の辺とし、第1の反射部材から第2の反射部材までを第2の辺とし、測量機中心から第2の反射部材までの高さが、第1の辺の長さと第2の辺の長さと、第1および第2の辺の狭角とにより、三角法を用いて求められる。
【0008】
機械高測定方法において、好ましくは、第1の反射部材が望遠鏡に対し着脱可能に設けられる。
【0009】
機械高測定方法において、好ましくは、第1の反射部材が、箱型の第1の保持部材の開口面と対向する面に取り付けられる。
【0010】
機械高測定方法において、好ましくは、第1の保持部材が、望遠鏡と嵌合することにより、測量機に取り付けられる。
【0011】
機械高測定方法において、好ましくは、第2の反射部材が水平軸に関し回動可能に設けられる。さらに好ましくは、第2の反射部材がコーナーキューブプリズムである。
【0012】
機械高測定方法において、好ましくは、コーナーキューブプリズムのプリズム面と、この第2の保持部材の開口面とが同一平面上にある。さらに好ましくは、第2の保持部材の開口面に、プリズム面を出射光の光軸に対して垂直にするためのマークが施されている。
【0013】
機械高測定方法において、好ましくは、測量機の高さが、測量機に設けられたコンピュータにより演算され、測量機の表示部に表示される。
【0014】
【発明の実施の形態】
以下、本発明による機械高測定方法の実施形態について添付図面を参照して説明する。
【0015】
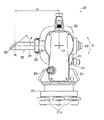
図1には機械高測定アダプタが測量機、および三脚とともに示される。測量機20は三脚12の上にスライド可能に固定され、測量機20の中心Oが基点Pのほぼ真上にくるように載置される。三脚12は3本の脚14が伸縮自在になっており、高さが調節可能である。
【0016】
測量機20の望遠鏡22は中心Oに関して水平軸回り(図2のA方向)に回動可能であり、その前方先端には反射ミラーユニット30が取付られる。筒状の反射ミラーユニット30には、望遠鏡22の光軸を所定角度(図中、角度αで示される)だけ偏向し、望遠鏡22の中心Oから距離aだけ離れた第1の反射部材である反射ミラー32が設けられる。
【0017】
測量機20のほぼ真下の基点P上には、プリズムユニット50が載置される。プリズムユニット50は3点で点支持され、第2の反射部材であるコーナーキューブプリズム60が、水平軸に回転可能に備えられる。コーナーキューブプリズム60は光を入射した方向に反射する。
【0018】
測量機20の望遠鏡22から出射された測定光(図中、光軸が1点鎖線で示される)は反射ミラーユニット30の反射ミラー32によって所定角度をもって下方に偏向され、プリズムユニット50のコーナーキューブプリズム60に入射する。コーナーキューブプリズム60は光の来た方向、即ち反射ミラー32へ測定光を反射させ、測定光は望遠鏡22に戻る。したがって、光波測距装置である測量機20によって測量機20の中心Oから反射ミラー32を介したコーナーキューブプリズム60までの距離Lが測定できる。光波測距とは光波を光軸方向に発し、対象物によって反射され戻ってきた光波を受光して対象物までの距離を測定する手法である。
【0019】
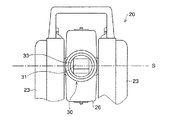
図2は、反射ミラーユニット30を取り付けた状態の測量機20の側面図である。図3は、反射ミラーユニット30の近傍の正面図であり、図4は反射ミラーユニット30の拡大断面図である。なお、図3の1点鎖線Sは中心Oを通る水平軸を示す。
【0020】
測量機20は台座21において三脚12に支持固定される。台座21には3つの水平調節部21aが設けられ、測量機20の水平調節を行なう。台座21の上方には、この台座21の鉛直軸に関して回動可能なU字型の支持部23が備えられる。支持部23は図示しない調整ネジによって回動する。支持部23の下部には、種々の測量機20の情報を表示する表示部24が設けられる。また支持部23には例えば各装置を制御するマイクロコンピュータ(図示しない)と、測量機中心を基点上に位置させるための求心望遠鏡25とが備えられる。
【0021】
図3で明らかなように、支持部23の間には望遠鏡支持部26が設けられ、望遠鏡支持部26は支持部23によってS軸周り(図2のA方向)に回動自在に支持される。望遠鏡支持部26の略中央にはS軸および支持部23に対して垂直の方向に延びる望遠鏡22が設けられる。図2を参照すると、望遠鏡支持部26と望遠鏡22は微動ネジ27により一体的に回動する。望遠鏡22の一端には着脱可能な接眼レンズ29が設けられ、他端側には反射ミラーユニット30が取付けられる。なお、望遠鏡22には透明の焦点板(図示しない)が設けられ、焦点板は中心を識別するための十字マークが施される。
【0022】
反射ミラーユニット30は、一端側に、断面が正方形であり一側面が解放された角柱部31を有し、他端側に正方形断面より大きい断面の円筒部33を有する鏡筒34を備えている。鏡筒34の角柱部31は一端部の上方において斜面部35を有し、この斜面部35の内壁には反射ミラー32が光軸に対し一定の角度(図中、θで示される)で取り付けられる。なお、角度θは任意に変更することができる。角度θと、前述の角度αとの関係は(1)式で示される。
【0023】
α=π−2θ (0<θ<π/2) ・・・(1)
【0024】
反射ミラー32と対向する円筒部33は、環状の鏡筒固定ネジ36によって望遠鏡22の先端に固定される。即ち望遠鏡22の内周面には周方向の溝22a,22bが段状に形成されており、円筒部33の外周面33aは、溝22bに係合する。円筒部33の円筒部当接面33cは望遠鏡当接面22cによって光軸方向に係止される。望遠鏡22の先端において、円筒部33の外周面33bと望遠鏡22の溝22aとの間には鏡筒固定ネジ36が設けられる。望遠鏡22の溝22aは鏡筒固定ネジ36と螺合するネジに形成される。溝22aと鏡筒固定ネジ36の外周面36aとが螺合するとともに、鏡筒固定ネジ36と円筒部33が係合することにより、鏡筒34の光軸方向の位置が規制される。円筒部33には鏡筒固定ネジ36が鏡筒34から抜け落ちないようにするための抜け止めストッパ38が設けられる。
【0025】
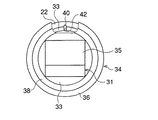
図5は鏡筒34を正面から見た図である。鏡筒34の円筒部33には、反射ミラー32の周方向の位置を規制するために、位置決めピン40が設けられている。望遠鏡22の望遠鏡当接面22cにはこの位置決めピン40と係合する位置決めピン溝42が形成される。
【0026】
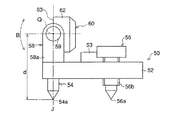
図6はプリズムユニット50の正面図、図7はプリズムユニット50の上面図、図8はプリズムユニット50の側面図である。なお、図6の1点鎖線Tはコーナーキューブプリズム60の中心Qを通る回転軸を示す。
【0027】
プリズムユニット50は円板形の整準台52を有し、この整準台52の上面の一端には略コの字の板材であるプリズムホルダ58が開口部を上にして、2つの固定ネジ57によって固定される。このプリズムホルダ58によってコーナーキューブプリズム60はプリズム回転軸T周り(図8のB方向)に回動自在に支持される。即ちプリズムホルダ58の2つの椀部58a上端にはホルダ穴58bが穿設され、プリズム回転ピン59が外側から挿入される。コーナーキューブプリズム60を保持するプリズムカバー62にはカバー椀部64が形成され、回転ピン59はホルダ穴58bを介してカバー椀部64のピン穴64aに圧入固定される。
【0028】
コーナーキューブプリズム60はガラスの立方体の一隅を切り取った三角錐体であり、互いに直交し、プリズムカバー62の内周面に当接する3つの反射面60aと、プリズムカバー62の開口側にある1つのプリズム面60bとを有する。図6に示すように正面から見ると、プリズム面60bにおいて、隣り合う2つの反射面の稜線3本(図中、太線で示す)と、この稜線の像3本(図中、細線で示す)とが、交差しているように映って見える。この6本の線の交点をコーナーキューブプリズム60の中心Qとする。ただし、中心Qはプリズム面60b、かつ軸T上にあることとする。
【0029】
プリズムカバー62の開口側の面、即ち中心マーク面63には、稜線を軸Tに合わせるためのマーク65が施される。マーク65に稜線が合っているか否かを確認することにより、望遠鏡22からの視軸方向に対し、中心マーク面63即ちプリズム面60bが垂直になっているかどうか判断できる。このように稜線とマーク65とを位置合わせすることにより、より精度の高い測定結果を得ることができる。
【0030】
整準台52は底面から突出して設けられた3つのピン、即ち固定された基点ピン54と、整準台52を貫筒して螺合する2つの整準ピン55、56とが設けられ、これらの3つのピン54、55、56により点支持される。基点ピン54は、その延長線がコーナーキューブプリズム60の中心Qを通るように設けられ、尖端部54aが地表面の基点P(図1参照)に合わせて設置される。この尖端部54aとコーナーキューブプリズム60の中心Qまでの長さをプリズム高さdとし、またこの線を基点軸J(図中、1点鎖線で示される)とする。2つの整準ピン55、56は基点ピン54の後方の左右に設けられ、整準台52と螺合するネジ部55b、56bを備え、基点軸Jが鉛直方向となるように整準台52の上下位置を調整する。
【0031】
整準台52の上面の略中央には、鉛直方向を決定するための気泡管53が設けられる。気泡管53は、目視のために上面に気泡53aと目盛り53bが設けられ、また気泡管53の基準面が基点軸Jと直交するように固定される。
【0032】
次に、図1を再び参照して動作を説明する。まず基点Pのほぼ真上に置いた三脚12に測量機20を取付け、整準および求心を行なう。マイクロコンピュータにはa、d、θが既知の値として記憶されている。なお、測定値を補正するプリズム定数は、プリズム中心Qが基準とされる。
【0033】
鏡筒34の円筒部33を望遠鏡22の溝22bに嵌合させ、望遠鏡22の光軸に対してラジアル方向の位置を決める。次に光軸周りに鏡筒34を回転させ、位置決めピン40を位置決めピン溝42に嵌合させて、反射ミラー32が光軸周りに関して角度θに定まるように、周方向の位置を決定する。
【0034】
鏡筒固定ネジ36を望遠鏡ネジ22aに締め込むことにより、円筒部当接面33cが望遠鏡当接面22cに当接し、機械中心Oから反射ミラー32の点Rまでの距離aが決定される。基点Pの上にはプリズムユニット50の基点ピン54の尖端部54aが置かれる。気泡管53の気泡53aが目盛り53bの中心に来るように目視しながら、2つの整準ネジ55、56を回転させ、基点軸Jが鉛直方向になるように整準台52が調節される。
【0035】
図9は、望遠鏡22からコーナーキューブプリズム60の視準を行なったときの画像を示す。コーナーキューブプリズム60は、中心マーク面63が反射ミラー32の方向に概略向くようにB方向(図8参照)に回転させられる。望遠鏡22を水平軸周りおよび鉛直軸周りに回動させ、望遠鏡22から覗いて、焦点板の十字線70とコーナーキューブプリズム60の中心マークを合わせる。図9に示すように、マークの一致が行なわれた後、測距を行ない測量機20の中心Oから反射ミラー32(点R)を介したコーナーキューブプリズム60(点Q)までの距離が求められる。
【0036】
図10は、機械高Hを求めるための点O,P,Qの位置関係を示す図である。(2)式に示すように、三角法を用いて辺OR、辺RQ、狭角αから辺OQを求め、辺OQと線分QPとの和から機械高Hが求められる。なお、基点Pが地面に対し凹凸がある場合は、機械高Hは凹凸分だけ補正される。
【0037】
【数1】

この演算は例えば支持部23内のマイクロコンピュータで行なわれ、演算結果が表示部24に表示される。
【0039】
以上のように、本発明では基点上に既知高さのプリズムユニットを載置し、測量機に備えられた望遠鏡を用いて測距を行なうので、正確な機械高さが容易に求められる。また従来は巻尺を用いていたので、巻尺を引張ることにより測量機の片側に負荷がかかり、測量機を動かしたり倒したりすることがあったが、本発明の機械高測定方法における機械高測定アダプタを用いた測量機では倒れることはない。
【0040】
なお、本実施形態では反射ミラーは光軸に関して、位置決めピンにより周方向は固定されるが、特に限定されることはなく回転自在にしてもよい。また、望遠鏡を覗いた際、焦点距離の違う接眼レンズに適宜変更して見やすい倍率にしてもよい。
【0041】
【発明の効果】
本発明によると、基点からの正確な機械高を容易に得る機械高測定方法が提供できる。
【図面の簡単な説明】
【図1】本発明による機械高測定方法の実施形態である測量機、機械高測定アダプタおよび三脚を示す図である。
【図2】図1に示す測量機の部分拡大側面図である。
【図3】図1に示す測量機の部分拡大正面図である。
【図4】図1に示す反射ミラーユニットの縦断面図である。
【図5】図4に示す鏡筒の正面図である。
【図6】図1に示すプリズムユニットの正面図である。
【図7】図5に示すプリズムユニットの上面図である。
【図8】図5に示すプリズムユニットの側面図である。
【図9】機械高測定時の望遠鏡に写る画像を示す図である。
【図10】機械高を求めるための各点の位置を示す模式図である。
【符号の説明】
12 三脚
20 測量機
30 反射ミラーユニット
50 プリズムユニット
60 コーナーキューブプリズム
Claims (8)
- 望遠鏡と、
測量機中心に設けられ、前記望遠鏡を介して測定光を出射するとともに、反射されて帰還した測定光を受光して、前記測量機中心から測定光が反射した位置までの第1の距離を検出する光波測距機構と、
前記望遠鏡の前方に配設され、前記測定光を所定の偏角で偏向する第1の反射部材と、
基点上の所定の高さ位置であって前記測量機中心の真下に設けられ、前記第1の反射部材によって偏向された前記測定光を反射し、前記第1の反射部材および前記望遠鏡を介して前記光波測距機構へ導く、水平軸の周りに回動可能な第2の反射部材と、
前記第1の距離と、前記測量機中心から前記第1の反射部材までの第2の距離と、前記第2の反射部材の基点からの高さと、前記偏角とに基いて、前記基点から前記測量機中心までの機械高を検出する機械高検出手段とを備え、前記光波測距機構が、水平軸を中心として前記測定光の出射角度を調整可能であることを特徴とする機械高測定装置。 - 前記第1の反射部材が前記望遠鏡に対し着脱自在に設けられることを特徴とする請求項1に記載の機械高測定装置。
- 前記第1の反射部材が、前記望遠鏡に着脱自在に設けられる保持部材の内壁に固定されることを特徴とする請求項2に記載の機械高測定装置。
- 前記第2の距離を第1の辺とし、前記第1の反射部材から前記第2の反射部材までの距離を第2の辺としたとき、前記機械高検出手段が、前記第1および第2の辺と前記第1および第2の辺の挟角とにより、三角法を用いて機械高を求めることを特徴とする請求項1に記載の機械高測定装置。
- 前記第2の反射部材がコーナーキューブプリズムを有することを特徴とする請求項1に記載の機械高測定装置。
- 前記第2の反射部材が、プリズムカバーをさらに有し、前記コーナーキューブプリズムの表面と前記プリズムカバーの開口面とが同一平面上にあることを特徴とする請求項5に記載の機械高測定装置。
- 前記プリズムカバーの開口面に、前記プリズム面を前記測定光に対して垂直にするためのマークが形成されていることを特徴とする請求項6に記載の機械高測定装置。
- 前記第2の反射部材に、前記測定光が入射する面を前記測定光に対して垂直にするためのマークが形成されていることを特徴とする請求項1に記載の機械高測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02332297A JP3718312B2 (ja) | 1997-01-22 | 1997-01-22 | 機械高測定装置 |
| US09/009,334 US5949548A (en) | 1997-01-22 | 1998-01-20 | Height sensing measurement device |
| DE19802379A DE19802379C2 (de) | 1997-01-22 | 1998-01-22 | Vermessungsgerät |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02332297A JP3718312B2 (ja) | 1997-01-22 | 1997-01-22 | 機械高測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10206158A JPH10206158A (ja) | 1998-08-07 |
| JP3718312B2 true JP3718312B2 (ja) | 2005-11-24 |
Family
ID=12107364
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02332297A Expired - Fee Related JP3718312B2 (ja) | 1997-01-22 | 1997-01-22 | 機械高測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3718312B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102679945A (zh) * | 2012-06-05 | 2012-09-19 | 哈尔滨工业大学 | 基于三点反射合作的卫星指向与姿态测量方法与装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102374861B (zh) * | 2010-08-12 | 2015-01-07 | 杨红林 | 产生铅垂激光束的全站仪或觇牌的点下对中操作方法 |
| CN113279345A (zh) * | 2021-04-13 | 2021-08-20 | 兰大林 | 一种市政公路用高度可调节的桥梁限高装置 |
| CN113074708A (zh) * | 2021-04-29 | 2021-07-06 | 王衍锋 | 一种工程测绘用全站仪 |
-
1997
- 1997-01-22 JP JP02332297A patent/JP3718312B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102679945A (zh) * | 2012-06-05 | 2012-09-19 | 哈尔滨工业大学 | 基于三点反射合作的卫星指向与姿态测量方法与装置 |
| CN102679945B (zh) * | 2012-06-05 | 2014-03-05 | 哈尔滨工业大学 | 基于三点反射合作的卫星指向与姿态测量方法与装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10206158A (ja) | 1998-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5949548A (en) | Height sensing measurement device | |
| US6453569B1 (en) | Surveying instrument and plumbing device for plumbing surveying instrument | |
| US9752863B2 (en) | Calibration method for a device having a scan function | |
| CN1071898C (zh) | 测量球-反射器 | |
| AU2007219279B2 (en) | Laser scanner | |
| CN100580374C (zh) | 激光测定方法及激光测定系统 | |
| US7145648B2 (en) | Multiple beam path surveying instrument | |
| US20150308825A1 (en) | Laser beam horizontal trueness testing device and corresponding method | |
| US7946044B2 (en) | Surveying instrument and a method therefor | |
| US7996998B2 (en) | Optical device and measuring method | |
| JPH04220514A (ja) | 所定の地面測点に対して測地器具を求心するための装置 | |
| US6067152A (en) | Alignment range for multidirectional construction laser | |
| CN111580127B (zh) | 具有旋转反射镜的测绘系统 | |
| JP3718312B2 (ja) | 機械高測定装置 | |
| CN117146861A (zh) | 一种基于激光校准用自定位目标靶装置 | |
| JP3803188B2 (ja) | 機械高測定機能付測量機 | |
| JP5645311B2 (ja) | 光波距離計 | |
| JP3481324B2 (ja) | 測量機の機械高測定方法および測定器 | |
| JP2005351702A (ja) | 自動測量システム | |
| JP3092302B2 (ja) | 光波測距システム | |
| JP2002181545A (ja) | 測量機用ターゲット装置 | |
| JPH08278135A (ja) | 測量機の自動求心装置 | |
| EP4239286A2 (en) | Surveying instrument | |
| JPH10206152A (ja) | 機械高測定方法 | |
| JPH01184411A (ja) | 測高測距計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050304 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050425 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050902 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090909 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |