JP3552869B2 - 走行距離補正装置 - Google Patents
走行距離補正装置 Download PDFInfo
- Publication number
- JP3552869B2 JP3552869B2 JP3156397A JP3156397A JP3552869B2 JP 3552869 B2 JP3552869 B2 JP 3552869B2 JP 3156397 A JP3156397 A JP 3156397A JP 3156397 A JP3156397 A JP 3156397A JP 3552869 B2 JP3552869 B2 JP 3552869B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- ground
- electric vehicle
- correction device
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Train Traffic Observation, Control, And Security (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
【発明の属する技術分野】
本発明は、走行距離補正装置に関する。
【0002】
【従来の技術】
一般に電気車の基準地点から走行距離を正確に求めることは、車両の位置を確認するために重要な情報である。そして、電気車を定位置に停止させる定点停止制御を行う場合、走行距離を正確に求めることが重要である。
【0003】
この様な技術として、特開平6−189417号公報に記載されるように、正確な設置位置を把握しているATS地上子を電気車が通過した際に、この正確な設置位置情報を真値として距離の補正を行う方法がある。
【0004】
【発明が解決しようとする課題】
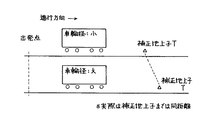
しかしながら、図6に示すように駅のホームの形状等により、同じ駅からあるATS地上子Tまでの距離が異なる場合があり、この場合電気車がATS地上子を通過するまでの距離が異なるため、正確にこのATS地上子の通過を検知し、設置位置情報を得ることが難しいという問題があった。
【0005】
そこで本発明は上述した問題点を解決するためになされたもので、走行距離を補正するまでの距離が複数存在するような場合でも、正確な走行距離に補正できる走行距離補正装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
上述した目的を達成するために、請求項1に記載の発明は、複数軸に設けられ、回転数を検出して出力する回転数検出手段と、前記複数軸のうち1つの軸を選択する軸選択手段と、この軸選択手段により選択された軸の回転数検出手段の出力と前記複数軸の車輪径に基づいて、電気車の走行距離を演算する距離演算手段と、地上に設けられた補正地上子を検知する地上子検知手段と、前記補正地上子の距離データが予め記憶された記憶手段と、前記車輪径のうち最大径と最小径に応じて前記補正地上子の検知幅を演算する地上子検知幅演算手段と、前記電気車の停止目標位置が複数ある場合、前記停止目標位置の偏差を前記検知幅に加算して出力する加算手段と、前記距離演算手段で演算された走行距離が前記データ記憶手段に記憶された距離データより前記加算手段の出力分手前の距離となった時から、前記地上子検知手段の検知を開始させる地上子検知指令手段と、前記地上子検知手段が前記補正地上子を検知した際に、前記距離演算手段で演算された走行距離を前記データ記憶手段に記憶された距離データに補正する手段とを有してなる。
【0007】
請求項2に記載の発明は、請求項1に記載の発明において、前記軸選択手段は、電気車の力行中は前記車輪径のうち最大径の軸を選択し、電気車の制動中は前記車輪径のうち最小径の軸を選択することを特徴とする。
【0008】
請求項3に記載の発明は、請求項1または請求項2に記載の発明において、前記軸選択手段は、電気車のだ行中は電気車の進行方向に対して最後尾の軸を選択することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1乃至請求項3のいずれかに記載の発明において、前記距離演算手段は、前記軸選択手段により選択された軸の回転数検出手段の出力と、前記車輪径のうち最小径に基づいて、電気車の走行距離を演算することを特徴とする。
【0010】
請求項5に記載の発明は、請求項1乃至請求項4のいずれかに記載の発明において、前記地上子検知幅演算手段は、前記車輪径のうち最大径と最小径と、補正地上子間距離に応じて前記検知幅を演算することを特徴とする。
【0011】
【発明の実施の形態】
本発明の実施の形態を図面を参照して詳細に説明する。
図1は走行距離補正装置の構成図、図2は制御装置の構成図である。
図1において、1は制御装置、2はATS地上子検知器、3a〜3dは複数軸(図では4軸)に設置された回転数検知器である。
【0012】
制御装置1は、回転数検知器3a〜3dが検知した信号を元に、電気車の走行距離を演算により認識し、この演算により認識された距離があらかじめ記憶してある後述する補正地上子の距離近辺で補正地上子と検知した時に、記憶してある補正地上子の距離を真値として補正を行う装置である。
図2において、変化率演算部5a〜5dは回転数検知器3a〜3dが検知した回転数の変化率を式(1)に基づき演算する。
【0013】
【数1】
dVT =(VT −VT−K )/K ………(1)

【0014】
なお回転数検知器3a〜3dが故障した場合やその他の異常が発生した時は、スイッチ4a〜4dにより異常軸を切り離して同様の軸選択を行う。
距離演算部7は、軸選択部6で選択された軸の回転数と電気車の各車輪のうち最小の車輪径をもとに演算される。従って、補正地上子Tまでの距離演算部7で演算された距離は、図3に示されるように見かけ上短くなる。
【0015】
電気車の各車輪の車輪径は、異なる為、最も距離差がでる車輪径の組み合わせは、
最小径:Dmin
最大径:Dmin +α
【0016】
【数2】
【0017】
データ記憶部10には、補正地上子Tの位置、距離情報があらかじめ記憶されている。そして、減算器11によりデータ記憶部10に記憶された補正地上子Tの距離情報と地上子検知幅演算部8で演算され、加算器9を介して得られる検知幅との差、すなわち補正地上子Tの位置の検知幅分手前側の距離が演算される。この減算器11からの出力と距離演算部7の出力が一致すると地上子検出指令部によりATS地上検知器2に対して、補正地上子Tを検知すべき指令が出力される。そしてその後ATS地上子検知器2が補正地上子Tを検知すると、スイッチ13aがA端子からB端子に切りかわると共に、スイッチ13bが閉成し、データ記憶部10に記憶された位置距離情報が、真の距離データとして出力されることになる。
【0018】
次に本実施の形態の具体例を説明する。
各軸の車輪径差:11mm,最大径: 771mm,最小径: 760mmの場合。
地上子検知幅演算部8では、下記の演算により図4に示す検知幅W0 を演算する。
電気車1km走行中の最大軸間距離差Sdは、
【0019】
【数3】
【0020】
停止目標位置が複数なければ、データ記憶部10に記憶された真の距離情報から上記検知幅W0 分手前の距離に、距離演算部7で演算された距離が一致した時に、ATS地上子検知器2により、補正地上子Tの検知が開始される。
【0021】
上述してきたように距離演算部7では、図3に示すように最小の車輪径をもとに距離を演算するため、補正地上子Tまでの見かけ上の距離が短くなるが、地上子検知幅演算部8で検知幅W0 を演算するため、確実に補正地上子Tの検知を行うことができる。従って、車輪径差による距離認識誤差や、空転・滑走発生時の回転数変化に伴う距離認識誤差を補正することができる。
【0022】
更に図5に示すように停止目標距離が停目1と停目2という風に異なる場合、停目距離差Lが50[m]以上あると、上記具体例で補正地上子T間隔が2[km]の時、検知幅は50[m]のため、検知を行うことができない。従って、加算器9では停目距離差Lを検知幅W0 に加えて新たな検知幅とすることで、停目1出発の場合でも停目2出発の場合でも、確実に補正地上子Tの検知を行って走行距離の補正を行うことができる。
【0023】
【発明の効果】
以上説明したように、本発明によれば走行距離を補正するまでの距離が複数存在するような場合でも、正確な走行距離に確実に補正できる走行距離補正装置を提供することができる。
【図面の簡単な説明】
【図1】本発明の一実施の形態を示す走行距離補正装置の構成図である。
【図2】制御装置の構成図である。
【図3】走行距離補正装置の動作説明図である。
【図4】走行距離補正装置の動作説明図である。
【図5】走行距離補正装置の動作説明図である。
【図6】従来の問題点を説明する図である。
【符号の説明】
1…制御装置
2…ATS地上子検知器
3a〜3d…回転数検知器
6…軸選択部
7…距離演算部
8…地上子検知幅演算部
9…加算器
10…データ記憶部
11…減算器
12…地上子検知指令部
Claims (5)
- 複数軸に設けられ、回転数を検出して出力する回転数検出手段と、
前記複数軸のうち1つの軸を選択する軸選択手段と、
この軸選択手段により選択された軸の回転数検出手段の出力と前記複数軸の車輪径に基づいて、電気車の走行距離を演算する距離演算手段と、
地上に設けられた補正地上子を検知する地上子検知手段と、
前記補正地上子の距離データが予め記憶された記憶手段と、
前記車輪径のうち最大径と最小径に応じて前記補正地上子の検知幅を演算する地上子検知幅演算手段と、
前記電気車の停止目標位置が複数ある場合、前記停止目標位置の偏差を前記検知幅に加算して出力する加算手段と、
前記距離演算手段で演算された走行距離が前記データ記憶手段に記憶された距離データより前記加算手段の出力分手前の距離となった時から、前記地上子検知手段の検知を開始させる地上子検知指令手段と、
前記地上子検知手段が前記補正地上子を検知した際に、前記距離演算手段で演算された走行距離を前記データ記憶手段に記憶された距離データに補正する手段とを有する走行距離補正装置。 - 請求項1に記載の走行距離補正装置において、
前記軸選択手段は、電気車の力行中は前記車輪径のうち最大径の軸を選択し、電気車の制動中は前記車輪径のうち最小径の軸を選択することを特徴とする走行距離補正装置。 - 請求項1または請求項2に記載の走行距離補正装置において、
前記軸選択手段は、電気車のだ行中は電気車の進行方向に対して最後尾の軸を選択することを特徴とする走行距離補正装置。 - 請求項1乃至請求項3のいずれかに記載の走行距離補正装置において、
前記距離演算手段は、前記軸選択手段により選択された軸の回転数検出手段の出力と、前記車輪径のうち最小径に基づいて、電気車の走行距離を演算することを特徴とする走行距離補正装置。 - 請求項1乃至請求項4のいずれかに記載の走行距離補正装置において、
前記地上子検知幅演算手段は、前記車輪径のうち最大径と最小径と、補正地上子間距離に応じて前記検知幅を演算することを特徴とする走行距離補正装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP3156397A JP3552869B2 (ja) | 1997-02-17 | 1997-02-17 | 走行距離補正装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP3156397A JP3552869B2 (ja) | 1997-02-17 | 1997-02-17 | 走行距離補正装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10229603A JPH10229603A (ja) | 1998-08-25 |
| JP3552869B2 true JP3552869B2 (ja) | 2004-08-11 |
Family
ID=12334656
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP3156397A Expired - Fee Related JP3552869B2 (ja) | 1997-02-17 | 1997-02-17 | 走行距離補正装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3552869B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4818885B2 (ja) * | 2006-11-17 | 2011-11-16 | 日本信号株式会社 | 列車制御装置 |
| JP4645667B2 (ja) * | 2008-03-24 | 2011-03-09 | 株式会社日立製作所 | 列車制御装置 |
| JP5220891B2 (ja) * | 2011-06-23 | 2013-06-26 | 日本信号株式会社 | 列車制御装置 |
| CN107323434B (zh) * | 2017-07-10 | 2020-06-09 | 杭州中车车辆有限公司 | 跨座式单轨列车转向架维修系统 |
-
1997
- 1997-02-17 JP JP3156397A patent/JP3552869B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10229603A (ja) | 1998-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6343253B1 (en) | Road shape estimation apparatus and curve approach control apparatus | |
| US9308926B2 (en) | Position control system | |
| US6385528B1 (en) | Curve approach speed control apparatus | |
| WO2018155489A1 (ja) | 車両制御装置、車両制御方法、プログラム | |
| JP2010517000A (ja) | 車両の速度を求める方法及び装置 | |
| JP2000177515A (ja) | レ―ダビ―ムにより車両の周囲を識別できる装置を車両に使用する方法 | |
| KR20130042949A (ko) | 열차 속도 측정 장치 및 방법 | |
| WO2007102175A1 (en) | A method for calculating forces acting on the footprint area of a tyre and apparatus for calculating said forces | |
| KR20150106200A (ko) | 차량 레이더 오차 보정 시스템 및 그 방법 | |
| JP2002536233A (ja) | 特に車両用espシステムのためのセンサ監視方法と装置 | |
| JP3552869B2 (ja) | 走行距離補正装置 | |
| CN111114594B (zh) | 轨道列车辅助驾驶控制方法、装置和列车 | |
| JP2012171563A (ja) | 鉄道車両の位置検出装置および位置検出方法 | |
| US7301446B2 (en) | Method of detecting undersized, oversized, underinflated or overinflated tires | |
| CN115140038A (zh) | 车辆的纵向控制方法、计算机设备、存储介质及车辆 | |
| CN117734669A (zh) | 一种车辆横向控制方法、计算机储存介质及电子设备 | |
| JP2015042106A (ja) | 軌道走行電動車両の故障検出装置、および軌道走行電動車両 | |
| JP2003502213A (ja) | 補正値テーブル作成、検査変数決定および車輪タイヤ圧力低下識別のための方法と装置 | |
| JP2000168552A (ja) | 鉄道車両の走行位置検知方法 | |
| JP3186947B2 (ja) | 自動列車運転装置 | |
| JP3597290B2 (ja) | 列車位置検出装置 | |
| CN109789791A (zh) | 车载装置以及紧急制动控制方法 | |
| JP2001063538A (ja) | 自動車両制御装置 | |
| CN112622898A (zh) | 基于车道中心的车辆控制方法、装置及车辆 | |
| KR100199988B1 (ko) | 무인차의 조향방법 및 조향장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040427 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090514 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090514 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100514 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110514 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110514 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120514 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120514 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140514 Year of fee payment: 10 |
|
| LAPS | Cancellation because of no payment of annual fees |