JP2022072402A - 弁当容器への食材塊盛り付け装置 - Google Patents
弁当容器への食材塊盛り付け装置 Download PDFInfo
- Publication number
- JP2022072402A JP2022072402A JP2020181808A JP2020181808A JP2022072402A JP 2022072402 A JP2022072402 A JP 2022072402A JP 2020181808 A JP2020181808 A JP 2020181808A JP 2020181808 A JP2020181808 A JP 2020181808A JP 2022072402 A JP2022072402 A JP 2022072402A
- Authority
- JP
- Japan
- Prior art keywords
- food
- filling
- receiving plate
- gripping
- storage case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 235000013305 food Nutrition 0.000 title claims abstract description 244
- 239000000463 material Substances 0.000 title abstract description 14
- 230000007246 mechanism Effects 0.000 claims abstract description 93
- 238000003860 storage Methods 0.000 claims abstract description 48
- 230000003028 elevating effect Effects 0.000 claims description 47
- 238000003756 stirring Methods 0.000 claims description 23
- 238000007599 discharging Methods 0.000 claims description 4
- 230000032258 transport Effects 0.000 description 30
- 238000003780 insertion Methods 0.000 description 16
- 230000037431 insertion Effects 0.000 description 16
- 239000000758 substrate Substances 0.000 description 16
- 230000000694 effects Effects 0.000 description 14
- 229910001220 stainless steel Inorganic materials 0.000 description 11
- 239000010935 stainless steel Substances 0.000 description 11
- 238000005192 partition Methods 0.000 description 8
- 238000003825 pressing Methods 0.000 description 8
- 238000009826 distribution Methods 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 240000007124 Brassica oleracea Species 0.000 description 1
- 235000003899 Brassica oleracea var acephala Nutrition 0.000 description 1
- 235000011301 Brassica oleracea var capitata Nutrition 0.000 description 1
- 235000001169 Brassica oleracea var oleracea Nutrition 0.000 description 1
- 235000010627 Phaseolus vulgaris Nutrition 0.000 description 1
- 244000046052 Phaseolus vulgaris Species 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 235000012489 doughnuts Nutrition 0.000 description 1
- 235000021056 liquid food Nutrition 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 235000012046 side dish Nutrition 0.000 description 1
- 235000014347 soups Nutrition 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
Images










Abstract
【課題】食材塊を大量に収納した収納ケースから盛り付けに必要な個数の食材塊を把持し確実に弁当容器内へ充填することができる食材塊盛り付け装置を提供する。
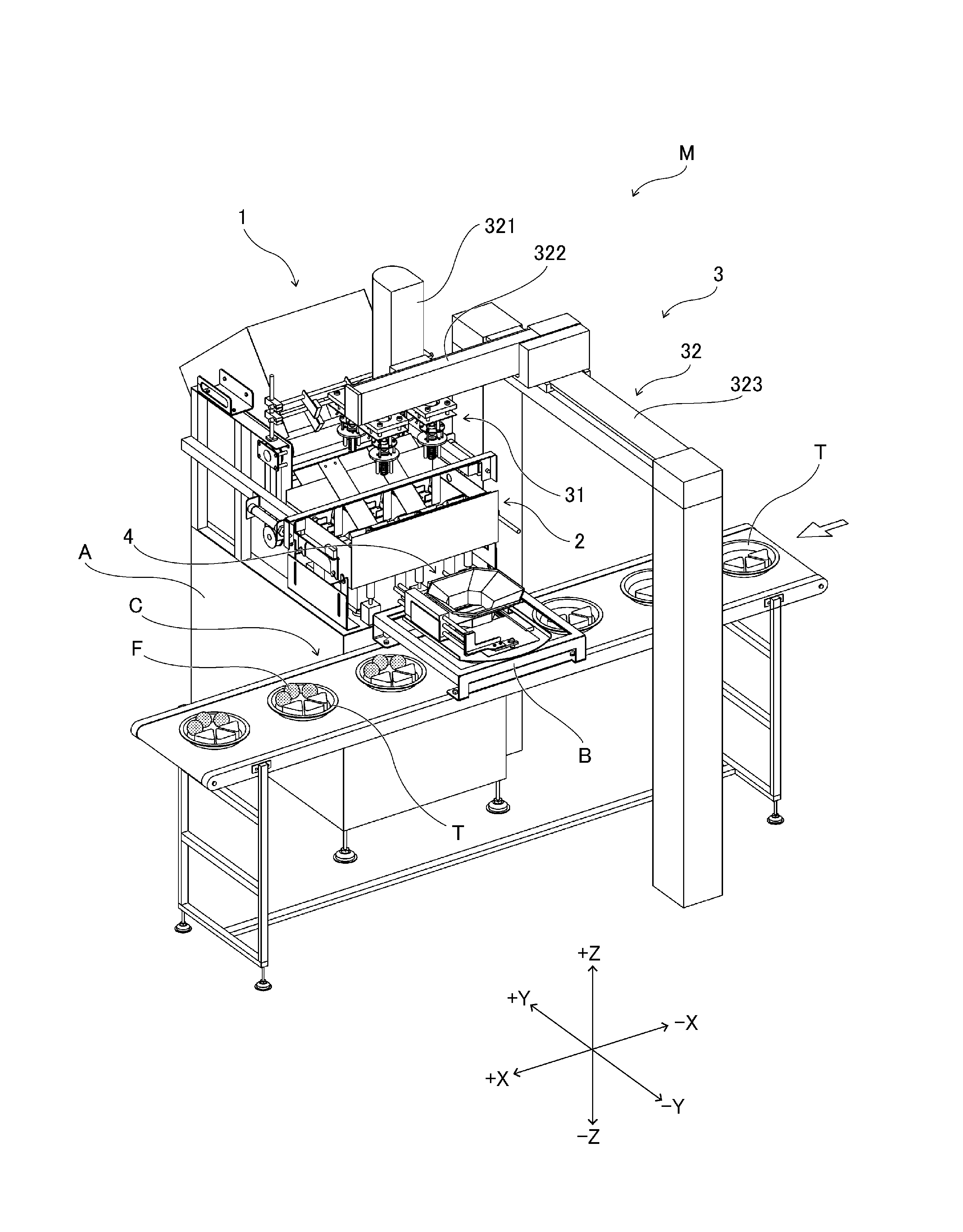
【解決手段】定形状に整形された食材塊Fを収納する収納ケース1と収納ケースから搬送された食材塊を受取る受取り皿体2と食材塊を把持搬送するための昇降自在の把持移動機構3と食材塊を弁当容器へ盛り付けるための充填機構4とより構成したことで、食材塊を必要個数のみを把持することができ、弁当容器Tへの盛り付けに際しては正確な位置に盛り付けを行うことができる食材塊盛り付け装置Mに関する。
【選択図】図1
【解決手段】定形状に整形された食材塊Fを収納する収納ケース1と収納ケースから搬送された食材塊を受取る受取り皿体2と食材塊を把持搬送するための昇降自在の把持移動機構3と食材塊を弁当容器へ盛り付けるための充填機構4とより構成したことで、食材塊を必要個数のみを把持することができ、弁当容器Tへの盛り付けに際しては正確な位置に盛り付けを行うことができる食材塊盛り付け装置Mに関する。
【選択図】図1
Description
本発明は、弁当容器へ食材塊の盛り付けを確実とする弁当容器への食材塊盛り付け装置に関する。
従来、コンビニエンスストアやスーパーマーケット等で販売される弁当に惣菜を盛り付けるには人手によって行われる場合が多い。しかしながら、衛生面や人件費、人手の不足等の問題がある。
そこで、近年弁当容器への惣菜盛り付けに際して、自動で惣菜の盛り付けを行う様々な盛り付け装置が存在する。
例えば、円筒状の食材保持具の上部に負圧吸引機構を設け、盛り付ける惣菜を負圧吸引し弁当容器上方で吸引を遮断することで盛り付けを行うように構成した食材盛り付け装置や(特許文献1参照)、一部を切欠した升状の食品運搬用容器に食品を載置し、該食品運搬容器をロボット装置で弁当容器上方まで把持運搬し、食品運搬用容器を傾けることで切欠部から弁当容器へ食品を落下させ盛り付けるように構成した食品盛り付け装置が開示されている(特許文献2参照)。
特許文献1記載の食材盛り付け装置は、負圧吸引することで食材を円筒状の食材保持具に保持することで、千切りキャベツや煮物等の一度に多量の細かい食材を保持する必要のある場合や、複数種類の食材保持する必要のある場合確実に食材保持具で保持し弁当容器の上方まで搬送することが可能となる利点がある。
また、特許文献2記載の食材盛り付け装置は、食品運搬用容器の食品投入部分の形状を単に切欠するだけでなく、升状の一側面にV字状の出口を形成したりやかんの注ぎ口のような突出部を形成したりすることで、煮豆等の粒上の食品やスープ等の液状の食品に対応できる利点がある。
しかしながら、特許文献1記載の食材盛り付け装置では、本発明が盛り付ける対処としている食材塊、すなわち唐揚げや肉団子等では一つ一つ重量が重いため負圧吸引の吸引力が不足し持ち上がらない場合や、逆に持ち上げるために吸引力を強くすることで食材塊同士がぶつかり崩れてしまう恐れがある。
また、負圧吸引を行うに際して、食材塊を必要個数だけ吸引することか困難であるし、弁当容器に投入する際も円筒状の食材保持具の上部から落下することで弁当容器までの距離が長くなってしまい食材塊が弁当容器でバウンドし上手く盛り付けられない虞がある。
もう一方の特許文献2記載の食品盛り付け装置では、食品運搬用容器に盛り付ける食品が載置されていることが前提となっており、食品運搬用容器に食品を載置する別の手段が必要となる問題がある。
また、弁当容器に食品を盛り付けるに際しても、食品運搬用容器を傾け食品を落下させる構成となっているため、食品運搬用容器の傾きの分だけ弁当容器から上方へ遠ざかることとなり、扁平状や粘度のある食品では滑り落ちるために盛り付けに最適であるものの、塊状の食品では転がり落ちる際に勢いが付きすぎ弁当容器内にうまく収まらない虞がある。
そのために弁当容器への食材塊の盛り付けが行える食材塊盛り付け装置の開発が求められていた。
本発明は、斯かる事情に鑑みてなされたものであって、定形状に整形された食材塊を収納する収納ケースと、収納ケースに隣接し収納ケースから搬送された食材塊を受取る受取り皿体と、受取り皿体の上方で食材塊を把持搬送するための昇降自在の把持移動機構と、コンベア上を搬送される弁当容器の上方で把持移動機構が把持搬送した食材塊を弁当容器へ盛り付けるための充填機構とより構成することで上記課題を解決した。
上記従来の課題を解決するために、本発明に係る食材塊盛り付け装置は、定形状に整形された食材塊を収納する収納ケースと、収納ケースに隣接し収納ケースから搬送された食材塊を受取る受取り皿体と、受取り皿体の上方で食材塊を把持搬送するための昇降自在の把持移動機構と、コンベア上を搬送される弁当容器の上方で把持移動機構が把持搬送した食材塊を弁当容器へ盛り付けるための充填機構とより構成すると共に、収納ケースは、下部の一部に開口した食材塊を排出するための排出窓と排出窓の下方に受取り皿体へ食材塊を搬送するための搬送ベルトとより構成し、受取り皿体は、底部に一個ずつ食材塊を持ち上げるため昇降自在な複数個の昇降体により構成し、充填機構は、略方形筒状の充填筒と、充填筒の底部を形成し開閉自在とした充填窓と、充填窓の下方位置で充填窓と弁当容器との間を昇降自在に往復動する充填補助具とより構成したことを特徴とする。
また、受取り皿体は、底部に受取り皿体内の食材塊を撹拌するための昇降自在な撹拌杆を構成したことにも特徴を有する。
また、収納ケースと受取り皿体との間には、受取り皿体の底部に設けた昇降体が食材塊を持ち上げた時点から昇降体上面に載置された食材塊を感知する感知センサを構成したことにも特徴を有する。
請求項1の発明によれば、定形状に整形された食材塊を収納する収納ケースと、収納ケースに隣接し収納ケースから搬送された食材塊を受取る受取り皿体と、受取り皿体の上方で食材塊を把持搬送するための昇降自在の把持移動機構と、コンベア上を搬送される弁当容器の上方で把持移動機構が把持搬送した食材塊を弁当容器へ盛り付けるための充填機構とより構成したことにより、食材塊を大量に収納した収納ケースから盛り付けに必要な個数の食材塊を把持し確実に弁当容器内へ充填することができる効果がある。
更には、収納ケースは、下部の一部に開口した食材塊を排出するための排出窓と排出窓の下方に受取り皿体へ食材塊を搬送するための搬送ベルトとより構成したことで、人手での作業は、調理済みの食材塊を収納ケースに投入するだけとなり人手の削減を期待でき、また、収納ケースと受取り皿体とに分けることで、収納ケースに大量の食材塊を収納でき補給の頻度を減らすことが可能となる効果がある。
更には、受取り皿体は、底部に一個ずつ食材塊を持ち上げるため昇降自在な複数個の昇降体を構成することで、昇降体上面に載置された単体の食材塊を把持するため、必要個数だけを確実に盛り付けることができる効果がある。
また、充填機構は、略方形筒状の充填筒体と充填筒体の底部を形成し開閉自在とした充填窓と充填窓の下方位置で充填窓と弁当容器との間を昇降自在とした充填補助具とから構成したことにより、食材塊を弁当容器に盛り付けるに際して、投入に合わせて充填補助具が弁当容器へ降下することにより弁当容器投入時のバウンドによる弁当容器外への落下や盛り付け位置のずれを防ぐ効果がある。
請求項2の発明によれば、底部に受取り皿体内の食材塊を撹拌するための昇降自在な撹拌杆を構成したことにより、受取り皿体内の食材塊の密度を均一化し、昇降体が各一つずつ食材塊を持ち上げることができるよう補助を行う効果がある。
請求項3の発明によれば、収納ケースと受取り皿体との間には、受取り皿体の底部に設けた昇降体が食材塊を持ち上げた時点から昇降体上面に載置された食材塊を感知する感知センサを構成したことにより、把持移動機構が昇降体上面に載置された食材塊を必要個数把持したことを確認できより確実に必要個数の盛り付けを可能とする効果がある。
この発明の要旨は、定形状に整形された食材塊を収納する収納ケースと、収納ケースに隣接し収納ケースから搬送された食材塊を受取る受取り皿体と、受取り皿体の上方で食材塊を把持搬送するための昇降自在の把持移動機構と、コンベア上を搬送される弁当容器の上方で把持移動機構が把持搬送した食材塊を弁当容器へ盛り付けるための充填機構とより構成すると共に、収納ケースは、下部の一部に開口した食材塊を排出するための排出窓と排出窓の下方に受取り皿体へ食材塊を搬送するための搬送ベルトとより構成し、受取り皿体は、底部に一個ずつ食材塊を持ち上げるため昇降自在な複数個の昇降体を構成し、充填機構は、略方形筒状の充填筒と充填筒の底部を形成し開閉自在とした充填窓と、充填窓の下方位置で充填窓と弁当容器との間を昇降自在とした充填補助具とより構成したことにある。
また、受取り皿体は、底部に受取り皿体内の食材塊を撹拌するための昇降自在な撹拌杆を構成したことにも特徴を有する。
また、収納ケースと受取り皿体との間には、受取り皿体の底部に設けた昇降体が食材塊を持ち上げた時点から昇降体上面に載置された食材塊を感知する感知センサを構成したことにも特徴を有する。
以下、本発明に係る食材塊盛り付け装置の実施例を図面に基づいて詳説する。
図1~図11は本発明の食材塊盛り付け装置を説明図であり、図1及び図2は食材塊盛り付け装置全体を、図3は収納ケース及び受取り皿体を、図4及び図5は受取り皿体を、図6~8は把持機構部を、図9~11は充填機構をそれぞれ示すものである。
図1~図11は本発明の食材塊盛り付け装置を説明図であり、図1及び図2は食材塊盛り付け装置全体を、図3は収納ケース及び受取り皿体を、図4及び図5は受取り皿体を、図6~8は把持機構部を、図9~11は充填機構をそれぞれ示すものである。
本発明の食材塊盛り付け装置Mは、図1及び図2に示すように、主に定形状に整形された食材塊Fを収納する収納ケース1と、収納ケース1から搬送された食材塊Fを受取る受取り皿体2と、食材塊Fを把持搬送するための昇降自在の把持移動機構3と、把持移動機構3が把持搬送した食材塊Fを弁当容器Tへ盛り付けるための充填機構4と、より構成される。
収納ケース1は、図1~3に示すように、主に上部開口の方形状で略45度に傾斜したケース本体11と、ケース本体11の傾斜した底面の下方側に一部開口した排出窓12と、排出窓12の下方位置にケース本体11と並行傾斜して取り付けられ食材塊Fを搬送する搬送ベルト13と、より構成される。
受取り皿体2は、図3及び図4に示すように、収納ケース1の下方位置に設けた食材塊Fを搬送するための搬送ベルト13の終端に位置し、主に上部開口の薄い箱型の受取り皿本体21と、受取り皿本体21の収納ケース1側上縁部から受取り皿本体21の底部に掛けて傾斜して取り付けられたガイド板22と、受取り皿本体21の底部に昇降自在とし食材塊Fを持ち上げる複数の昇降体23と、昇降体23と同じく受取り皿本体21の底部に昇降自在とし受取り皿本体21に収容された食材塊Fを撹拌するための撹拌杆24と、より構成される。
また、収納ケース1と受取り皿体2は、図1及び図2に示すように、共に方形状の載置台Aの上に配置される。
受取り皿体2に隣接して、弁当容器Tが搬送されるベルトコンベアCが設置される。
把持移動機構3は、図1及び図2に示すように、該ベルトコンベアCの上方を跨ぎ受取り皿体2に隣接するように設置される。
把持移動機構3は、図1及び図2に示すように、該ベルトコンベアCの上方を跨ぎ受取り皿体2に隣接するように設置される。
把持移動機構3は、主に食材塊Fを一個ずつ把持するための把持手段を複数有した把持機構部31と、把持機構部31を食材塊Fの把持位置及び充填位置まで移動させる移動機構部32と、より構成される
充填機構4は、図1、図2及び図9に示すように、前記ベルトコンベアCの上方位置に設置された上面に開口部を有した架台Bの上に載置され、主に把持移動機構3によって搬送された食材塊Fを一時保持するための充填筒体41と、充填筒体41の底部を形成すると共に開閉自在とした充填窓42と、充填窓42の下方位置で架台Bの開口部より下に配した弁当容器Tとの間で昇降自在に往復動する充填補助具43と、より構成される。
すなわち食材塊Fは、収納ケース1の上部開口よりケース本体11内に収納されたのち、排出窓12から搬送ベルト13上へ自由落下する。
落下した食材塊Fは、搬送ベルト13により終端部に設置された受取り皿体2へ搬送される。
搬送された食材塊Fは、搬送ベルト13から直接受取り皿本体21の手前側へ落下するものと、ガイド板22上を転がり受取り皿本体21の奥側へ運ばれるものと、に分かれ受取り皿本体21内に疎らに収容される。
収容された食材塊Fは、受取り皿本体21の底部に設けた複数の昇降体23により各1個ずつ複数同時に持ち上げられる。
持ち上げられた複数の食材塊Fは、把持移動機構3の移動機構部32によって昇降体23の上方に移動された把持機構部31によって全て同時に把持される。
把持された複数の食材塊Fは、把持移動機構3の移動機構部32によって充填機構4の上方まで運ばれる。
運ばれた複数の食材塊Fは、充填機構4の充填窓42が閉蓋状態時に前記把持機構部31によって充填筒体41内部へ投下される。
投下された複数の食材塊Fは、ベルトコンベアC上を搬送される弁当容器Tが充填機構4の真下に位置するときに充填窓42が開蓋し、弁当容器Tへ向けて落下される。
弁当容器Tに向けて落下される複数の食材塊Fは、食材塊Fの落下に合わせて同時に下降する充填補助具43内部によって、互いの衝突による落下位置のずれを防ぎ弁当容器Tの盛り付け位置に確実に充填することができる。
以下詳細に各部材の構成と機能を説明する。
以下詳細に各部材の構成と機能を説明する。
(1)収納ケース
収納ケース1は、図1~図3に示すように、載置台Aの上に配置され、上部開口の方形状としたケース本体11と、ケース本体11の底面の一部を切欠開口した排出窓12と、排出窓12の下方に位置した搬送ベルト13と、より構成される。
収納ケース1は、図1~図3に示すように、載置台Aの上に配置され、上部開口の方形状としたケース本体11と、ケース本体11の底面の一部を切欠開口した排出窓12と、排出窓12の下方に位置した搬送ベルト13と、より構成される。
ケース本体11は、調理済みの食材塊Fを収納するためのものであり、熱に強く腐食しにくい素材、例えばステンレスで形成される。
全体の態様としては、上部開口の方形状で略45度に傾斜しており、上部の開口部分から作業員が調理済みの食材塊Fをケース本体11へ投入することで、傾斜した底部によって食材塊Fが転がりケース本体11の傾斜下方へ集められる。
排出窓12は、略45度傾斜したケース本体11の傾斜した底部下方に長方形状の開口として形成される。
窓形状としては、長方形状としているが食材塊が通過できる大きさであればどのような形状でもよい。
窓形状としては、長方形状としているが食材塊が通過できる大きさであればどのような形状でもよい。
食材塊Fはケース本体11の傾斜下方に集められたのち傾斜した底部下方の排出窓12から順次後述する搬送ベルト13上へ自由落下する。
排出窓12は、底部に設けた開口部としているが、通常閉蓋状態で食材塊Fを収納し落下させたいときに開蓋するような開閉自在の扉を設けたものでもよくケース本体11に収納された食材塊Fを順次搬送ベルト13上に落下するものであればよい。
搬送ベルト13は、前記排出窓12の下方位置にケース本体11と並行となるように略45度傾斜して設置される。
搬送ベルト13は、図示しない駆動部と連結された2つのプーリ131と2つのプーリ131間に懸架する無端状のベルト本体132とベルト本体の表面には高さ略食材塊F程とし、横幅方向で略食材塊F1個分の間隔毎に立設した複数枚のフィン133とからなる。
排出窓12からベルト本体132上に落下された食材塊Fは、搬送ベルト13のプーリ131の駆動によりベルト本体132が回転することで傾斜を登るように搬送される。
搬送に際しては、食材塊Fがベルト本体132上を転がり落ちないようにフィン133により受け止められると同時に保持されながら搬送される。
収納ケース1は以上の構成により、食材塊Fを多量に収納することができ、次工程の受取り皿体2へ食材塊Fを順次搬送し供給し続けることができる。
(2)受取り皿体
受取り皿体2は、図1~図3に示すように、載置台Aの上に配置されると共に収納ケース1の搬送ベルト13の終端部に接続され、また、ベルトコンベアCに隣接するように載置台Aごと設置する。
受取り皿体2は、図1~図3に示すように、載置台Aの上に配置されると共に収納ケース1の搬送ベルト13の終端部に接続され、また、ベルトコンベアCに隣接するように載置台Aごと設置する。
全体構成としては、上方開口の薄い箱型の受取り皿本体21と、収納ケース1側の上縁部から受取り皿本体21の底部に掛けて傾斜して取り付けられた一定幅員のガイド板22と、受取り皿本体21の底部に設けた昇降自在とし食材塊Fを一個単位で持ち上げる複数個の昇降体23と、同じく受取り皿本体21の底部に設けた受取り皿本体21内に収容された食材塊Fを撹拌するために昇降自在とした撹拌杆24と、受取り皿本体21の上方略中央に位置しガイド板22の前後方向に移動自在に構成した食材塊分配部25からなる。
受取り皿本体21は、図3及び図4に示すように、全体の態様として上部開口の薄い箱型とし、更に内部には外周壁よりやや低い仕切り壁211を設けており、収納ケース1のケース本体11と同じく熱に強く腐食しにくい素材、例えばステンレスで形成され、搬送されてきた食材塊Fを収容する。
また、受取り皿本体21の仕切り壁211によって平面視6等分に区画分けされ、仕切り壁211は各区画が後述する昇降体23を中心として縮小していくように下方へ向け拡開する形状としている。
ガイド板22は、一定幅員の板状でステンレスやプラスチック等で形成され、受取り皿本体21の収納ケース1側上縁部から、受取り皿本体21の略中央部にかけて傾斜して取り付けられる。
ガイド板22は、搬送ベルト13から搬送された食材塊Fが一部分に載置されるのを防ぐために設けられ、食材塊Fは搬送後にそのまま受取り皿本体21の手前側に落ちるものと、ガイド板22の上に落下しガイド板22上を転がり受取り皿本体21の奥側へ運ばれるものと、に分かれることで受取り皿本体21内に疎らに収容されることとなる。
また、このガイド板22は複数枚取り付けられており、本実施例では平面視で受取り皿本体21を略3等分する位置にそれぞれ2枚のガイド板22を設けている。
昇降体23は、図3及び図4に示すように、平面視で受取り皿本体21の底部を6等分しそれぞれの中央位置に1つずつ設けられる。
昇降体23は、上面を食材塊略1個分の面積を有した四角柱状とし、上面の四方縁部には落下防止壁231が設けられている。
また、受取り皿本体21の下方に設けた駆動部23aにより、下降状態を受取り皿本体21の底面と同面に昇降自在としている。
食材塊Fは、図5に示すように、受取り皿本体21内で昇降体23が上昇することで、昇降体23上に各1個ずつ載置され持ち上げられる。
この昇降体23は形状、個数ともに特に限定されるものではないが、少なくとも上面を食材塊F1個が載置可能な面積とし、盛り付けに必要な食材塊Fの個数以上設けることにより、盛り付け動作が1度で完結することができる。
また、昇降体23上面の四方縁部に落下防止壁231を形成することで、上昇時に食材塊Fが転がり脱落することを防ぐことができる。
また、この落下防止壁231は、食材塊Fの半分以下の高さとして、昇降体23の上面の四方縁部に設けることが好ましいが、必ずしも四方すべてに形成せずともよいし、次工程の食材塊Fの把持を行う把持具の形状によっては、高さが食材塊Fの半分以上の高さとなってもよい。
また、昇降体23には上面に載置された食材塊Fの有無を検知する重量センサを搭載することで、昇降体23が食材塊Fを持ち上げることができているかの判定と、後述する把持移動機構3が把持を正確に行えているかの判定を行うことができる。
撹拌杆24は、図4に示すように、昇降体23よりも上面部分が狭い柱状とし、昇降体23と同様に受取り皿本体21の底部に昇降体23及びガイド板22に干渉しない位置に複数個設け、昇降体23とは別の駆動部24aにより昇降自在としている。
撹拌杆24は受取り皿本体21内の食材塊Fが一箇所に集まることを防ぐためのものであり、図5に示すように、撹拌杆24が上昇し一所に集積された食材塊Fを下方から押し上げることで仕切り壁211を越えて分散させることができる。
食材塊Fは分散されることで、受取り皿本体21内に均一化され、順当に昇降体23に持ち上げられる機会を得ることができる。
そのため、本実施例では撹拌杆24の態様を昇降体23上面より小さな柱状としているが、形状に左右されるのもではなく、昇降自在として食材塊Fを下方から押し上げることができればよい。
その際、撹拌杆24の上面の面積を食材塊Fよりも小さくすることや、上面を平らとせず傾斜や半球状とすることで食材塊Fを確実に移動させることができる。
上記昇降体23及び撹拌杆24の動作は、図5aに示すように、食材塊Fの持ち上げ前に撹拌杆24が上昇し食材塊を疎らにし、その後図5bに示すように、昇降体23が上昇することで上面に載置された食材塊Fを持ち上げる。
食材塊分配部25は、図3に示すように、受取り皿本体21の上方を横架する分配杆251と受取り皿本体21の左右に位置し分配杆251を支持すると同時に前後方向へ移動自在とするシリンダ252とよりなる。
分配杆251は、受取り皿本体21の等間隔に下方延設した分配板251aを有し、シリンダ252により前後方向に移動自在とされることで、ガイド板22によって運ばれた食材塊Fを昇降体23付近に疎らに分配することができる。
また本実施例では、図2及び図3に示すように、収納ケース1と受取り皿体2との間に感知センサ5を構成する。
感知センサ5は、受取り皿体2の昇降体23が食材塊Fを持ち上げた際に感知し、昇降体23の上面に食材塊Fの有無を感知する。
すなわち、昇降体23が食材塊Fを持ち上げたこと、後述する把持移動機構3が昇降体23上面に載置された食材塊Fを把持したことを感知する。
そうすることで、必要個数を把持したかの判断と、昇降体23上面に食材塊Fがなくなったことで次の食材塊Fを持ち上げる判断と、を行うことができる。
(3)把持移動機構
把持移動機構3は、図1及び2に示すように、弁当容器Tが搬送されるベルトコンベアC上方を跨ぎ、且つ、受取り皿体2に隣接するように設置される。
把持移動機構3は、図1及び2に示すように、弁当容器Tが搬送されるベルトコンベアC上方を跨ぎ、且つ、受取り皿体2に隣接するように設置される。
把持移動機構3は、食材塊Fを把持するための把持機構部31と、把持機構部31を移動させるための移動機構部32と、大きく2つの機構部とからなる。
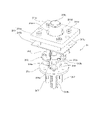
把持機構部31は、主に図6に示すように、上部基板311と、上部基板311中央に穿設した第一回転軸挿貫孔311dと、上部基板311に垂設固定した複数の連結杆312と、連結杆312を介して上部基板311と一体とした支持押圧板313と、支持押圧板313の中央に穿設した第二回転軸挿貫孔313aと、第二回転軸挿貫孔313aの周囲に穿設した複数の連結ピン挿貫孔313bにそれぞれ挿貫され上下変位可能とした複数の連結ピン314と、連結ピン314の下端に連結ピン314と一体となるよう取付けた規制棒支持板315と、規制棒支持板315の中央に穿設した第三回転軸挿貫孔315aと、各回転軸挿貫孔(311d、313a、315a)に挿貫した螺旋把持体316と、規制棒支持板315に垂設固定した複数の食材塊規制棒317とより構成されている。
上部基板311は、平面視略正方形のステンレス板から構成された、上方基板311aと下方基板311bとからなる。
また、上部基板311は、後述する移動機構部32のうち上下方向に移動自在とした第一アーム部321に接続される。
また、上方基板311aは、後述する把持機構連結体318と連結を行うために下方基板311bに比してやや厚みのあるステンレス板によって形成されている。
上方基板311aと下方基板311bはボルト、ナット等311cによって切った位となるように固定されている。
それぞれの基板(311a、311b)の中央には螺旋把持体316を挿貫するための第一回転軸挿貫孔311dを穿設している。
下方基板311bの底面には複数の連結杆312を垂設固定しており、該連結杆312を介して支持押圧板313を一体としている。
支持押圧板313は、円形状のステンレス板から形成され、中央には第二回転軸挿貫孔313aを穿設しており、全体形状をドーナツ状としている。
また、支持押圧板313は、第二回転軸挿貫孔313aの周囲に回転軸第二挿貫孔313aより小さい連結ピン挿貫孔313bを複数穿設している。
連結ピン314は、連結ピン挿貫孔313bより径の小さい円柱状としており、連結ピン挿貫孔313bへ挿貫した際に自重により支持押圧板313より吊下げた状態としている。
すなわち、連結ピンは下方から押されることで上方へ変位し持ち上がるように構成されている。
規制棒支持板315は、連結ピン314の下端部に垂設固定された円形状のステンレス板である。
規制棒支持板315の中心には第三回転軸挿貫孔315aが穿設されており、支持押圧板313と同様に全体をドーナツ状としている。
螺旋把持体316は、把持機構部31の中央部に配設し、第一回転軸挿貫孔~第三回転軸挿貫孔(311d、313a、315a)に挿貫される。
螺旋把持体316は、線体支持軸316aと、線体支持軸316aに垂設した螺旋線体316bと、線体支持軸316aの上部に取付けたモータ316cとからなる。
螺旋線体316bは、ステンレス等を素材とした線状部材を螺旋形状とし先端部を尖状形成したものであり、モータ316cの駆動によって線体支持軸316aと一体に回転するよう構成されている。
把持を行うには、移動機構32の第一アーム部321により把持機構部31を食材塊Fに向けて下降させると共に、螺旋線体316bを回転させることで食材塊Fに先端部を挿し込むことで行うことができる。
食材塊規制棒317は、規制棒支持板315に垂設固定された複数の棒状部材であり、熱や腐食に強いステンレス等から形成されている。
食材塊規制棒317は、食材塊Fを把持する際に、食材塊Fに上方から当接し、螺旋線体316bの回転に食材塊Fが供回りすることを防ぐことができる。
また、食材塊規制棒317は、規制棒支持板315を介して連結ピン314と一体としているため、把持機構部31の下降によって食材塊Fと接触すると、食材塊Fの上部または周面に自重のみで当接し、無理に押さえつけることなく食材塊Fが供回りせんとする動きを規制することができる。
上記のように、螺旋線体316bの先端部が食材塊Fに挿し込まれる際に供回りを防ぐことで、把持動作を確実なものとする効果がある。
上記把持機構部31のより詳しい動作としては、図7aに示すように、後述する移動機構部32により食材塊Fの上方に把持機構部31を移動させ、図7bに示すように、把持機構部31を降下させると共に螺旋線体316bを回転させることで食材塊Fに先端を差し込み、図7cに示すように、食材塊規制棒317がそのものの自重によって食材塊Fの上面または周面に当接して供回りを防止し、図7dに示すように、移動機構部32によって持ち上げることで把持を行う。
上述した把持機構部31は、食材塊Fを1個単位で確実に把持する機構であるため、弁当容器Tへの盛り付けに必要となる個数を同時に把持するために複数の把持機構部31を移動機構部に接続するよう構成するとよい。
なお、本実施例では、図8に示すように、把持機構部31の上部基板311をコの字状の把持機構連結体318によって連結することで4つの把持機構部31を備えた構成としている。
また、複数の把持機構部31を構成するに際しては、線体支持軸316aとその下端に垂設した螺旋線体316bを一体に回転させるためのモータ316cを複数の把持機構部31に対して共通とし、すべてを同時に回転させる構成としてもよい。
移動機構部32は、図1及び図2に示すように、把持機構部31の上部基板311を固定し把持機構部31を昇降自在にする第一アーム部321と、第一アーム部321に連接され第一アーム部321をベルトコンベアの搬送方向に対し平行した方向に移動自在とした第二アーム部322と、第二アーム部322に連接されベルトコンベアCの搬送方向に対して直交した方向に移動自在とした第三アーム部323と、各アーム部を駆動させるアーム駆動部とから構成される。
第一アーム部321は、図中Z軸方向への移動を行うことで、把持機構部31を食材塊Fが持ち上げられた受取り皿体2へ向けて下降させる動作と、把持した食材塊Fを把持機構部31が把持した後に上方へ持ち上げる動作と、把持した食材塊Fを充填機構4へ投下するために落下距離を短くするための下降動作とを主に行うためのものである。
第二アーム部322は、図中X軸方向への移動を行い、第三アーム部323は図中Y軸方向への移動を行うことで、把持機構部31を食材塊F把持位置への移動や、食材塊Fを把持したのち充填機構4への移動を主に行うためのものである。
すなわち第一アーム部321は主に把持動作に伴う上下方向への移動を行い、第二アーム部322及び第三アーム部323は食材塊Fの移し替えに伴う前後左右方向への移動を行う効果がある。
また、各アーム部は図示しないアーム駆動部によりX、Y、Z軸方向への移動を可能としている。
アーム駆動部は、各アームを駆動できるものであればどのようなものでもよく、例えば電動式や油圧式等が考えられる。
また、各アーム部の位置を制御するためにカメラ等のセンサを用いてもよい。
上述した把持移動機構3は、回転し食材塊Fを突き刺し把持する螺旋状の螺旋線体316bと食材塊Fの供回りを防ぐ食材塊規制棒317を有し、X、Y、Zの三方向への移動を可能にした第一アーム部~第三アーム部(321~323)とで構成しているが、この構成に限ったものでなく、指を模した把持部と複数個の関節を有したアーム部とからなるロボットハンドのようなものであってもよい。
(4)充填機構
充填機構4は、図1、図2及び図9に示すように、弁当容器Tが搬送されるベルトコンベアCの上方位置に設置された上面に開口部を有した架台Bの上に載置され、主に把持移動機構3によって搬送された食材塊Fを一時保持するための充填筒体41と、充填筒体41の底部を形成すると共に開閉自在とした充填窓42と、充填窓42の下方位置で架台Bの開口部より下に配した弁当容器Tとの間で昇降自在に往復動する充填補助具43と、より構成される。
充填機構4は、図1、図2及び図9に示すように、弁当容器Tが搬送されるベルトコンベアCの上方位置に設置された上面に開口部を有した架台Bの上に載置され、主に把持移動機構3によって搬送された食材塊Fを一時保持するための充填筒体41と、充填筒体41の底部を形成すると共に開閉自在とした充填窓42と、充填窓42の下方位置で架台Bの開口部より下に配した弁当容器Tとの間で昇降自在に往復動する充填補助具43と、より構成される。
架台B及び充填筒体41は、熱に強く腐食しにくい素材、例えばステンレスで筒状に形成され、充填筒体41の内部には仕切り壁411を形成した。
充填筒体41は、図9に示すように、充填窓42と合わせ把持移動機構3により把持搬送された複数個の食材塊Fを仕切り壁411によって区画された収納空間に一個ずつ収容することで弁当容器Tに充填盛り付ける前の調整を行う。
仕切り壁411は、弁当容器Tへ食材塊Fを充填盛り付ける際に、食材塊F同士が互いにぶつかり所定位置に正しい盛り付けができなくなることや、食材塊F同士が重なり美しく盛り付けができなくなることを防ぐ効果がある。
充填窓42は、図10及び図11に示すように、充填筒体41の下部に設けた略正方形の板状部材であり、充填筒41の底部を形成する。
充填窓42は、駆動部42aに接続され充填窓42が水平方向にずれることで開閉自在に構成される。
また、充填窓42の下方には弁当容器Tを感知するセンサが取り付けられることで、充填機構4の真下に弁当容器Tが存在することを確認したのち底部を開放することで食材塊Fを弁当容器Tに充填する。
食材塊Fは、前述した把持移動機構3から弁当容器Tへ直接充填されるのではなく、一度充填機構4に投下されることで、落下位置を弁当容器Tにより近づけ食材塊Fに与える衝撃を緩和させると共に、弁当容器Tの位置を感知してから充填を行うことで盛り付け位置への充填を正確なものとする効果がある。
また、充填窓42の下方位置には筒状で下方に向かって先細のテーパー形状で、熱に強く腐食しにくい素材、例えばステンレスで形成された充填補助具43が設けられている。
この充填補助具43は、図11に示すように、駆動部43aにより充填窓42の下方位置から弁当容器Tまでの間で昇降自在に往復動するよう構成されている。
充填補助具43は、前記感知センサからの信号を受け充填窓42が開蓋状態となったことで落下する食材塊Fと同時に弁当容器Tに向かって下降する。
充填窓42から投下された食材塊Fは、充填補助具43の中を通ることで、複数個の食材塊F同士が衝突することで落下位置のずれを防ぎ弁当容器Tの正しい盛り付け位置へ充填される。
すなわち、食材塊Fは弁当容器Tに充填される直前まで充填補助具43内を落下することで、着地時に弁当容器Tの底でバウンドしてこぼれ落ちることや、盛り付け位置から転がることを防ぐ効果等、美しい盛り付け状態となるように補助を行う効果がある。
上述した各種効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本実施例に記載されたものに限定されるものではない。
M 食材塊盛り付け装置
T 弁当容器
C ベルトコンベア
A 載置台
B 架台
1 収納ケース
11 ケース本体
12 排出窓
13 搬送ベルト
2 受取り皿体
21 受取り皿本体
22 ガイド板
23 昇降体
24 撹拌杆
3 把持移動機構
31 把持機構部
316 螺旋把持体
317 食材塊規制棒
32 移動機構部
321 第一アーム部
322 第二アーム部
323 32c 第三アーム部
4 充填機構
41 充填筒体
42 充填窓
43 充填補助具
5 感知センサ
T 弁当容器
C ベルトコンベア
A 載置台
B 架台
1 収納ケース
11 ケース本体
12 排出窓
13 搬送ベルト
2 受取り皿体
21 受取り皿本体
22 ガイド板
23 昇降体
24 撹拌杆
3 把持移動機構
31 把持機構部
316 螺旋把持体
317 食材塊規制棒
32 移動機構部
321 第一アーム部
322 第二アーム部
323 32c 第三アーム部
4 充填機構
41 充填筒体
42 充填窓
43 充填補助具
5 感知センサ
Claims (3)
- 定形状に整形された食材塊を収納する収納ケースと、
収納ケースに隣接し収納ケースから搬送された食材塊を受取る受取り皿体と、
受取り皿体の上方で食材塊を把持搬送するための昇降自在の把持移動機構と、
コンベア上を搬送される弁当容器の上方で把持移動機構が把持搬送した食材塊を弁当容器へ盛り付けるための充填機構とより構成すると共に、
収納ケースは、下部の一部に開口した食材塊を排出するための排出窓と排出窓の下方に受取り皿体へ食材塊を搬送するための搬送ベルトとより構成し、
受取り皿体は、底部に一個ずつ食材塊を持ち上げるため昇降自在な複数個の昇降体を構成し、
充填機構は、略方形筒状の充填筒体と充填筒体の底部を形成し開閉自在とした充填窓と充填窓の下方位置で充填窓と弁当容器との間を昇降自在とした充填補助具とから構成したことを特徴とする食材塊盛り付け装置。 - 受取り皿体は、底部に受取り皿体内の食材塊を撹拌するための昇降自在な撹拌杆を構成したことを特徴とする請求項1に記載の食材塊盛り付け装置。
- 収納ケースと受取り皿体との間には、受取り皿体の底部に設けた昇降体が食材塊を持ち上げた際に昇降体上面に載置された食材塊を感知する感知センサを構成したことを特徴とする請求項1又は2に記載の食材塊盛り付け装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020181808A JP2022072402A (ja) | 2020-10-29 | 2020-10-29 | 弁当容器への食材塊盛り付け装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020181808A JP2022072402A (ja) | 2020-10-29 | 2020-10-29 | 弁当容器への食材塊盛り付け装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022072402A true JP2022072402A (ja) | 2022-05-17 |
Family
ID=81604516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020181808A Pending JP2022072402A (ja) | 2020-10-29 | 2020-10-29 | 弁当容器への食材塊盛り付け装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022072402A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115119959A (zh) * | 2022-05-26 | 2022-09-30 | 昆明鑫晟源科技有限公司 | 一种物料自动填充入盒的系统及方法 |
-
2020
- 2020-10-29 JP JP2020181808A patent/JP2022072402A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115119959A (zh) * | 2022-05-26 | 2022-09-30 | 昆明鑫晟源科技有限公司 | 一种物料自动填充入盒的系统及方法 |
| CN115119959B (zh) * | 2022-05-26 | 2023-09-05 | 昆明鑫晟源科技有限公司 | 一种物料自动填充入盒的系统及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8034390B2 (en) | Automated food processing system and method | |
| US7891289B2 (en) | Automated food frying device and method | |
| US5104002A (en) | Food dispenser and method | |
| US8770433B2 (en) | Vibratory tray conveyor and method | |
| US5282498A (en) | Prod dispenser, dispenser container and method | |
| US6871676B2 (en) | Automated device and method for packaging food | |
| EP0591577A2 (en) | Automatic dispenser for ice-cream cakes and the like | |
| CN111557598A (zh) | 一种自动化餐饮设备 | |
| JP7002217B2 (ja) | 食品把持装置、食品移載装置及び食品把持方法 | |
| JP4675297B2 (ja) | 食材等の材料自動計量装置 | |
| JP2018203371A (ja) | 食品収容方法と食品収容装置 | |
| US7337594B2 (en) | Food dispensing device and method | |
| US20110151074A1 (en) | Automated food preparation apparatus and method | |
| JP2022072402A (ja) | 弁当容器への食材塊盛り付け装置 | |
| US7441388B2 (en) | Automated device for packaging food | |
| US7356980B2 (en) | Automated method for packaging food | |
| US11280663B2 (en) | Weighing system and weighing method | |
| CN212630580U (zh) | 一种自动化出餐装置 | |
| JP2018194362A (ja) | 食品把持移載装置及び食品把持移載方法 | |
| CN113995303A (zh) | 全自动智能出餐饮设备 | |
| JP2018193160A (ja) | 食品移載装置、食品把持装置及び食品移載方法 | |
| US6960157B2 (en) | Automated system and method for handling food containers | |
| CN214905833U (zh) | 炒食机的熟食自动装盒装置 | |
| CN112173266B (zh) | 一种食品自动分发系统 | |
| US20030205147A1 (en) | Conveyor system and method for packaged food |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231010 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240423 |