JP2020184887A - 自動追尾照射装置 - Google Patents
自動追尾照射装置 Download PDFInfo
- Publication number
- JP2020184887A JP2020184887A JP2019089503A JP2019089503A JP2020184887A JP 2020184887 A JP2020184887 A JP 2020184887A JP 2019089503 A JP2019089503 A JP 2019089503A JP 2019089503 A JP2019089503 A JP 2019089503A JP 2020184887 A JP2020184887 A JP 2020184887A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- light
- irradiation
- detected
- irradiation device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 14
- 238000000605 extraction Methods 0.000 claims abstract description 11
- 230000033001 locomotion Effects 0.000 claims abstract description 11
- 238000003384 imaging method Methods 0.000 claims abstract description 8
- 230000008859 change Effects 0.000 claims abstract description 5
- 230000001678 irradiating effect Effects 0.000 claims abstract description 3
- 239000000284 extract Substances 0.000 claims description 2
- 230000009545 invasion Effects 0.000 abstract description 8
- 241001465754 Metazoa Species 0.000 abstract description 6
- 230000001846 repelling effect Effects 0.000 abstract description 4
- 241000607479 Yersinia pestis Species 0.000 description 12
- 230000002940 repellent Effects 0.000 description 11
- 239000005871 repellent Substances 0.000 description 11
- 230000000694 effects Effects 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 241000282693 Cercopithecidae Species 0.000 description 2
- 241000282994 Cervidae Species 0.000 description 2
- 241001137251 Corvidae Species 0.000 description 2
- 241000282898 Sus scrofa Species 0.000 description 2
- 241000282458 Ursus sp. Species 0.000 description 2
- 230000036760 body temperature Effects 0.000 description 2
- 210000005069 ears Anatomy 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 241000282472 Canis lupus familiaris Species 0.000 description 1
- 241000282326 Felis catus Species 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images

Landscapes
- Catching Or Destruction (AREA)
- Burglar Alarm Systems (AREA)
- Studio Devices (AREA)
Abstract
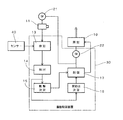
【課題】数少ない設備で広い領域にて確実に害獣を忌避できる自動追尾照射装置を提供する。【解決手段】被検知体の侵入を検知するセンサー40と、レーザー光又はLED光を照射する光照射装置10と、被検知体を撮像する撮像装置11と、撮像装置11と光照射装置10に追尾動作をさせる追尾駆動装置21、22と、センサー40の信号から被検知体の侵入を検知する侵入検知手段13、撮像装置11からの撮像画像の変化から動態部分を抽出する動態抽出手段14、動態抽出手段14の信号からレーザー光又はLED光の照射点を決定する照射点決定手段16、動態抽出手段14の信号から被検知体の動きを決定する動態決定手段15及び照射点決定手段15の信号を受けてレーザー光又はLED光を被検知体に対して照射させ、撮像装置11及び光照射装置10に追尾動作をさせる制御手段17から構成される駆動制御装置30と、を備える自動追尾照射装置。【選択図】図1
Description
本発明は自動追尾照射装置に関し、特に数少ない設備で広い領域において確実に害獣を忌避できるようにした自動追尾照射装置に関する。
従来より、人間の耳には聞こえ難い高い周波数の超音波や光を用いて猪、猿、熊、鹿、烏等の害獣を忌避する害獣忌避装置が種々提案されている。
例えば、センサーで害獣の侵入を検知すると、人間の耳に聞こえ難く、害獣の耳に聞こえる周波数の超音波を発射して害獣を忌避する害獣忌避装置が提案されている(特許文献1、特許文献2、特許文献3)。
また、センサーで害獣の侵入を検知すると、紫外線や白色のLEDを照射して害獣を忌避する害獣忌避装置も提案されている(特許文献4)。
また、センサーで害獣の侵入を検知すると、紫外線や白色のLEDを照射して害獣を忌避する害獣忌避装置も提案されている(特許文献4)。
また、監視カメラによって不審者の侵入を検知すると、監視カメラに不審者の動きを追尾させ、不審者に対して退去警告を発し、又指令に基づいて又は自動でマーキングボールなどを侵入者に発射するようにした自動監視警告システムが提案されている(特許文献5)。
しかし、特許文献1、2、4記載の害獣忌避装置では害獣が超音波や光の照射領域から出てしまうと、忌避効果がなくなるので、害獣が超音波や光の照射されない領域を学習して安全な領域で活動してしまうことがあった。
また、特許文献3記載の害獣忌避装置では超音波発生器を回動させて広い領域で忌避効果を奏するものの、広い領域で忌避効果を確保するためには超音波出力を大きくするか、超音波発生器を多数設ける必要があった。
さらに、特許文献5記載の自動監視警告システムは害獣の忌避に適用することも可能であるが、具体的にどのように追尾するのかが不明である。
また、特許文献3記載の害獣忌避装置では超音波発生器を回動させて広い領域で忌避効果を奏するものの、広い領域で忌避効果を確保するためには超音波出力を大きくするか、超音波発生器を多数設ける必要があった。
さらに、特許文献5記載の自動監視警告システムは害獣の忌避に適用することも可能であるが、具体的にどのように追尾するのかが不明である。
本発明はかかる問題点に鑑み、数少ない設備で広い領域において確実に害獣を忌避できるようにした自動追尾照射装置を提供することを課題とする。
そこで、本発明に係る自動追尾照射装置は、所定の領域への被検知体の侵入を検知するセンサーと、レーザー光又はLED光を照射する光照射装置と、所定の領域を撮像する撮像装置と、該撮像装置及び上記光照射装置に追尾動作をさせる追尾駆動装置と、上記センサーの信号から上記所定の領域に被検知体が侵入したことを検知する侵入検知手段、該侵入検知手段の信号を受け、上記撮像装置の信号から被検知体の撮像画像を得るとともに、該撮像画像の変化から上記撮像画像の動態部分を抽出する動態抽出手段、該動態抽出手段の信号を受け、レーザー光又はLED光の照射点を決定する照射点決定手段、上記動態抽出手段の信号を受けて上記被検知体の動きを決定する動態決定手段及び上記照射点決定手段の信号を受け、上記光照射装置からレーザー光又はLED光を被検知体に対して照射させるとともに、上記動態決定手段の信号を受け、上記追尾駆動装置を駆動させて上記被検知体の動きに対して上記撮像装置及び光照射装置に追尾動作をさせる制御手段から構成される駆動制御装置と、を備えたことを特徴とする。
本発明の特徴の1つは被検知体を撮像し、撮像画像から被検検知の動きと照射点を求め、動く方向に応じて撮像装置に追尾動作させるとともに、レーザー光又はLED光を追尾させながら照射するようにした点にある。
これにより、動く害獣に対してレーザー光又はLED光を確実に照射させることができ、数少ない設備で広い領域において確実に害獣を忌避できる。
これにより、動く害獣に対してレーザー光又はLED光を確実に照射させることができ、数少ない設備で広い領域において確実に害獣を忌避できる。
本発明は猪、猿、熊、鹿、烏等の害獣の忌避に適用すればその効果が大きいが、不審者の侵入の排除に適用してもその効果を発揮する。なお、害獣と不審者の追尾照射を切り替えられるようにするのがよい。
レーザー光又はLED光の照射点は害獣や不審者の目が望ましいが、顔面に向けて照射するようにしてもよい。レーザー光又はLED光は単光線であってもよいが、効果を上げる上で束状光線として命中率をアップさせるのがよい。レーザー光又はLED光の照射出力は害獣や人体に健康上の悪影響がない出力とするのがよい。
被検知体が忌避を必要としない物体、例えば犬や猫などの愛玩動物と害獣を区別できるのがよい。そこで、愛玩動物、害獣、人体などの画像パターンを多数用意しておき、撮像画像と画像パターンを比較して追尾照射すべきか否かを判別するようにしてもよい。
レーザー光又はLED光の照射パターンは1つであってもよいが、害獣の学習機能によって効果が発揮されなくなるおそれがある。かかる場合には複数の照射パターンを用意しておき、照射パターンを関数や乱数などを用いて選択して照射するようにしてもよい。
以下、本発明を図面に基づいて詳細に説明する。図1及び図2は本発明に係る自動追尾照射装置の好ましい実施形態を示す。図において、自動追尾照射装置には感熱センサー40が設けられ、感熱センサー40は害獣の侵入を忌避する領域(所定の領域)に侵入した害獣(被検知体)の体温を検知して害獣の侵入を判定する一方、感熱センサー40の信号は駆動制御装置30に入力されるようになっている。
駆動制御装置30では感熱センサー40の検知信号が入力されるとCPUが起動され、CPUの機能手段である侵入検知手段13がサーモセンサー40の信号から所定の領域に害獣が侵入したことを検知する一方、サーモカメラ(撮像装置)11を作動させる。サーモカメラ30は対象を撮像し、サーモカメラ30の信号は駆動制御装置30に与えられるようになっている。なお、通常画像とサーモ画像とを切り替えて撮像し、サーモ画像を用いて演算処理を行うようにしてもよい。
駆動制御装置30ではサーモカメラ11の信号が入力されると、CPUの機能手段である動態抽出手段14が撮像画像を得て画像パターンを抽出し、画像パターンの解析処理を行って害獣の種類を決定するとともに、画像パターンの変化から画像の動態部分を抽出するようになっている。
画像動態部分が抽出されると、CPUの機能手段である動態決定手段15が害獣の動態部分の変化から害獣の動きを決定するとともに、CPUの機能手段である照射点決定手段16が画像パターンからレーザー光を照射する照射点を決定するようになっている。
動態決定手段15及び照射点決定手段16の信号はCPUの機能手段である制御手段17に与えられ、制御手段17はサーモカメラ11及びレーザー装置(光照射装置)10のステップモーター21、22に駆動制御信号を与え、サーモカメラ11及びレーザー装置(光照射装置)10を旋回又は揺動させて追尾動作をさせ、レーザー装置10はレーザー光を動く害獣の目に向けて照射し、サーモカメラ11は害獣の動きに追尾しながら撮像を行うようになっている。
次に、制御処理について説明する。電源がONされると、駆動制御装置30では制御処理が開始され、感熱センサー40で害獣の体温が感知され、害獣が領域内に侵入したと判定されると、サーモカメラ11が作動されて害獣の姿が撮像されるとともに(ステップS10)、画像システム(CPU)が起動される(ステップS11)。
画像システムが起動されると、サーモカメラ11の撮像画像が取り込まれ、画像パターンの解析処理が行われ(ステップS12)、撮像画像の二値化処理などによって画像パターンが作成され、画像パターンから害獣の種類が決定されるとともに、画像パターンの動態部分のみが抽出されて画像パターンの処理する領域が限定され(ステップS13)、映像マトリックスの分割アドレス処理(番地設定)が行われ(ステップS14、図2の20参照)、マトリックスのアドレス指定が行われてステップモーター21、22の角度が設定され(ステップS15、S16)、サーモカメラ11及びレーザー装置10が指定されたアドレスに追尾動作されるとともに、レーザー装置10から害獣の目に向けて所定の強さのレーザー光が照射される。
ここで、映像マトリックスの分割アドレス処理について詳細に説明すると、映像の画像画面を縦横に分割してマトリックス座標を形成し、映像信号の走査線(V/H)に対して順に番地(番号)を割り当てる。番地数(分割数)の割当てはカメラの走査数や視野幅によって適正値にマッチングを行う。
次に、ターゲットの動画部の番地をロギングする。面積として、複数の番地が存在することが重要である。面積部分のセンターポイントを演算処理にて算出して番地を決定し、ステップモーター22を作動させてレーザー光の照射ポイントを決定した番地(座標位置)に移動させる。
次回の移動時は軌跡移動(左右限定処理など‥‥)として演算処理を効率的に行うことができる。最短時間で演算処理してステップモーター22のモーター制御を行う。これにより、消費電力を軽減化でき、又ハードウェア処理速度のパフォーマンスを抑えることが可能となり、トータル的なコストダウンに繋がる。
以上のように、本例によれば、動く害獣に対してレーザー光を確実に照射させることができ、確実に害獣を忌避でき、又数少ない設備で広い領域をカバーできる。
また、害獣の画像パターンのうち、動態部分を抽出して処理を行うようにしたので、高い演算処理能力を発揮する。
10 レーザー装置
11 サーモカメラ
13 侵入検知手段
14 動態抽出手段
15 動態決定手段
16 照射点決定手段
17 制御手段
20、21 ステップモーター(追尾駆動装置)
30 駆動制御装置
40 感熱センサー
11 サーモカメラ
13 侵入検知手段
14 動態抽出手段
15 動態決定手段
16 照射点決定手段
17 制御手段
20、21 ステップモーター(追尾駆動装置)
30 駆動制御装置
40 感熱センサー
Claims (1)
- 所定の領域への被検知体の侵入を検知するセンサー(40)と、
レーザー光又はLED光を照射する光照射装置(10)と、
所定の領域を撮像する撮像装置(11)と、
該撮像装置(11)及び上記光照射装置(10)に追尾動作をさせる追尾駆動装置(21、22)と、
上記センサー(40)の信号から上記所定の領域に被検知体が侵入したことを検知する侵入検知手段(13)、該侵入検知手段(13)の信号を受け、上記撮像装置(11)の信号から被検知体の撮像画像を得るとともに、該撮像画像の変化から上記撮像画像の動態部分を抽出する動態抽出手段(14)、該動態抽出手段(14)の信号を受け、レーザー光又はLED光の照射点を決定する照射点決定手段(16)、上記動態抽出手段(14)の信号を受けて上記被検知体の動きを決定する動態決定手段(15)及び上記照射点決定手段(16)の信号を受け、上記光照射装置(10)からレーザー光又はLED光を被検知体に対して照射させるとともに、上記動態決定手段(15)の信号を受け、上記追尾駆動装置(21、22)を駆動させて上記被検知体の動きに対して上記撮像装置(11)及び光照射装置(10)に追尾動作をさせる制御手段(17)から構成される駆動制御装置(30)と、
を備えたことを特徴とする自動追尾照射装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019089503A JP2020184887A (ja) | 2019-05-10 | 2019-05-10 | 自動追尾照射装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019089503A JP2020184887A (ja) | 2019-05-10 | 2019-05-10 | 自動追尾照射装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020184887A true JP2020184887A (ja) | 2020-11-19 |
Family
ID=73220557
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019089503A Pending JP2020184887A (ja) | 2019-05-10 | 2019-05-10 | 自動追尾照射装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020184887A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022143594A (ja) * | 2021-03-18 | 2022-10-03 | Necプラットフォームズ株式会社 | 防鳥装置、防鳥システム、防鳥方法、及び防鳥プログラム |
| JP2025003374A (ja) * | 2023-06-23 | 2025-01-09 | 有限会社アジル | 鳥獣忌避システム |
| JP2025020906A (ja) * | 2023-07-31 | 2025-02-13 | 株式会社大正クエスト | ネズミ駆除装置 |
-
2019
- 2019-05-10 JP JP2019089503A patent/JP2020184887A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022143594A (ja) * | 2021-03-18 | 2022-10-03 | Necプラットフォームズ株式会社 | 防鳥装置、防鳥システム、防鳥方法、及び防鳥プログラム |
| JP7171799B2 (ja) | 2021-03-18 | 2022-11-15 | Necプラットフォームズ株式会社 | 防鳥装置、防鳥システム、防鳥方法、及び防鳥プログラム |
| JP2025003374A (ja) * | 2023-06-23 | 2025-01-09 | 有限会社アジル | 鳥獣忌避システム |
| JP7731161B2 (ja) | 2023-06-23 | 2025-08-29 | Amx株式会社 | 鳥獣忌避システム |
| JP2025020906A (ja) * | 2023-07-31 | 2025-02-13 | 株式会社大正クエスト | ネズミ駆除装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020184887A (ja) | 自動追尾照射装置 | |
| US9072281B2 (en) | Method and device for destroying parasites on fish | |
| CN101170901A (zh) | 用于害虫检测的系统和方法 | |
| ES2809681T3 (es) | Dispositivo y método de eliminación selectiva de pupas | |
| US20150023566A1 (en) | Insect and Other Small Object Image Recognition and Instant Response | |
| KR20150130803A (ko) | 전염병 모니터링 방법 및 이를 이용한 시스템, 이를 수행하기 위한 기록매체 | |
| ATE471696T1 (de) | Expositionskontrolle beim nachweis ionisierender strahlung auf scanning-basis | |
| JP7715970B2 (ja) | 害獣駆除装置 | |
| CN118614487B (zh) | 一种动物驱赶方法、装置、设备及存储介质 | |
| JP6059957B2 (ja) | 鳥獣識別装置、鳥獣識別方法、及びプログラム | |
| JP6746189B2 (ja) | 火災検知装置及び火災検知方法 | |
| KR20190059107A (ko) | 말벌 탐지 시스템 | |
| CN118386990A (zh) | 一种信号控制方法、装置、车辆和存储介质 | |
| JPWO2023089945A5 (ja) | ||
| CN115553280B (zh) | 驱鸟装置、控制方法、终端及存储介质 | |
| CN213246585U (zh) | 生物驱赶设备 | |
| KR20230115104A (ko) | 인공지능 및 레이저를 이용하는 유해조수 퇴치를 위한 장치 | |
| Ram et al. | A self induced warning system for wild animal trespassing using machine vision system | |
| JP7731161B2 (ja) | 鳥獣忌避システム | |
| JP2020005532A (ja) | 動物撃退システム及び動物撃退装置及び動物撃退方法 | |
| US12579967B2 (en) | Interference deterrent systems and methods | |
| US20250218235A1 (en) | Interference deterrent systems and methods | |
| KR102579085B1 (ko) | 반수생 동물 포획 방법 및 장치 | |
| Kim et al. | Eco-Friendly Laser Deterrent System for Woodpeckers Utilizing YOLOv8 | |
| KR20190076282A (ko) | 레이저를 이용한 라인스캔 방식의 타깃치료장치 및 그 제어방법 |