JP2020184873A - 誘導機の回転を判断する装置および方法 - Google Patents
誘導機の回転を判断する装置および方法 Download PDFInfo
- Publication number
- JP2020184873A JP2020184873A JP2020065542A JP2020065542A JP2020184873A JP 2020184873 A JP2020184873 A JP 2020184873A JP 2020065542 A JP2020065542 A JP 2020065542A JP 2020065542 A JP2020065542 A JP 2020065542A JP 2020184873 A JP2020184873 A JP 2020184873A
- Authority
- JP
- Japan
- Prior art keywords
- space vector
- current
- stator
- voltage
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000006698 induction Effects 0.000 title claims abstract description 59
- 238000000034 method Methods 0.000 title claims description 32
- 239000000411 inducer Substances 0.000 claims abstract description 56
- 230000004907 flux Effects 0.000 claims abstract description 29
- 238000004590 computer program Methods 0.000 claims description 14
- 239000011800 void material Substances 0.000 claims description 6
- 230000008859 change Effects 0.000 claims description 4
- 230000004044 response Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 5
- 238000004804 winding Methods 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/14—Estimation or adaptation of motor parameters, e.g. rotor time constant, flux, speed, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/029—Restarting, e.g. after power failure
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
- H02P21/28—Stator flux based control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
- H02P21/28—Stator flux based control
- H02P21/30—Direct torque control [DTC] or field acceleration method [FAM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/34—Arrangements for starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/0004—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
- H02P23/0027—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control using different modes of control depending on a parameter, e.g. the speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/24—Controlling the direction, e.g. clockwise or counterclockwise
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
- H02P27/12—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation pulsing by guiding the flux vector, current vector or voltage vector on a circle or a closed curve, e.g. for direct torque control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/01—Asynchronous machines
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
−誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成し、
−電圧空間ベクトルの長さを制御して誘導機の固定子電流を調節し、固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たし、
−電流空間ベクトルのq成分の波形に基づいて、誘導機の回転子の回転速度と回転子の回転方向の少なくとも一方を推定する
ように構成された1つ以上のプロセッサ回路を用いて実行される処理システムを備え、
電流空間ベクトルのd成分は電圧空間ベクトルに平行であり、電流空間ベクトルのq成分は電圧空間ベクトルに垂直である。
−誘導機の固定子電圧を形成する変換器段、
−少なくとも部分的に誘導機の固定子電流に基づいて固定子電圧を制御するコントローラ、および
−誘導機の回転子の回転速度と回転子の回転方向の少なくとも一方を推定する本発明による装置
を含む新規な電子式電力変換器も提供される。
−誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成すること、
−電圧空間ベクトルの長さを制御して誘導機の固定子電流を調節し、固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たすこと、および
−電流空間ベクトルのq成分の波形に基づいて、誘導機の回転子の回転速度と回転子の回転方向の少なくとも一方を推定すること
を含む。
−誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成し、
−電圧空間ベクトルの長さを制御して、固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たすように誘導機の固定子電流を調節し、
−電流空間ベクトルのq成分の波形に基づいて、誘導機の回転子の回転速度と回転子の回転方向の少なくとも一方を推定する
ようにプログラム可能なプロセッサを制御するためにコンピュータで実行可能な命令を含む。
id=(2/3)(iu−iv/2−iw/2)cos(θ)+(1/√3)(iv-iw)sin(θ)、および
iq=(1/√3)(iv−iw)cos(θ)-(2/3)(iu−iv/2−iw/2)sin(θ)
式中iw=−iu−ivであり、電流空間ベクトルのd成分idは電圧空間ベクトルに平行で、電流空間ベクトルのq成分iqは電圧空間ベクトルに垂直である。一般性を限定することなく、電圧空間ベクトルの固定方向は、相uの磁気軸の方向、すなわちθ=0となるように選択され得る。この例示的な事例では、
id=(2/3)(iu−iv/2−iw/2)およびiq=(1/√3)(iv-iw)
である。
Pag=uuiu+uviv+uwiw-Rs(iu 2+iv 2+iw 2)
式中Rsは固定子抵抗である。推定した空隙電力が回転子に向かって流れる場合、誘導機105はモータとして作用し、回転速度の推定値、すなわち電流空間ベクトルの回転速度は大きすぎる。同様に、推定した空隙電力が回転子から外れて流れる場合、誘導機105は発電機として作用し、回転速度の推定値、すなわち電流空間ベクトルの回転速度は小さすぎる。
−誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成する手段、
−電圧空間ベクトルの長さを制御して、以下の条件:a)固定子電流によって構成された電流空間ベクトルが所定の長さを有する、b)電流空間ベクトルは、電圧空間ベクトルと平行な所定のd成分を有する、のいずれか一方を満たすように誘導機の固定子電流を調節する手段、および
−誘導機の回転子の回転速度および/または回転子の回転方向を、電流空間ベクトルのq成分の波形に基づいて推定する手段であって、q成分は電圧空間ベクトルに垂直である、手段
を含む、装置の一例である。
−行為301:誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成すること、
−行為302:電圧空間ベクトルの長さを制御して、以下の条件:a)固定子電流によって構成された電流空間ベクトルが所定の長さを有する、b)電流空間ベクトルは、電圧空間ベクトルと平行な所定のd成分を有する、のいずれか一方を満たすように誘導機の固定子電流を調節すること、および
−行為303:誘導機の回転子の回転速度および/または回転子の回転方向を、電流空間ベクトルのq成分の波形に基づいて推定することであって、q成分は電圧空間ベクトルに垂直であること
を含む。
−固定子電流に関する条件を満たした最初の時点での電流空間ベクトルのq成分の変化方向を検知すること、および
−検知した変化方向に基づいて回転方向を判断すること
を含む。
−固定子電流に関する条件を満たした最初の時点の後に発生する電流空間ベクトルのq成分の波形の最初の局所極値の極性を検知すること、および
−検知した極性に基づいて回転方向を判断すること
を含む。
−固定子電流に関する条件を満たした最初の時点から電流空間ベクトルのq成分の波形がその最初の局所極値に達する瞬間までの経過時間を示す第1の時間値を測定すること、および
−測定した第1の時間値に基づいて回転速度を推定すること
を含む。
−電流空間ベクトルのq成分の波形の2つの局所最大値の間または2つの局所最小値の間に経過した時間を示す少なくとも1つの第2の時間値を測定すること、および
−測定した少なくとも1つの第2の時間値に基づいて回転速度を推定すること
を含む。
−電流空間ベクトルが推定した回転速度で回転しているときの固定子電流、および固定子抵抗固定子電圧に基づいて、誘導機の空隙電力が流れる方向を推定すること、
−推定した流れる方向が誘導機の回転子に向かっているときに電流空間ベクトルの回転速度を下げること、および
−推定した流れる方向が誘導機の回転子から外れているときに電流空間ベクトルの回転速度を上げること
を含む。
−固定子電流に関する条件を満たした最初の時点の後で電流空間ベクトルのq成分の波形が所定期間内に局所極値に達しているかどうかを監視すること、および
−所定期間内に達する局所極値がない状況に応答して、所定期間に発生した磁束を有する誘導機の挙動に基づいて回転速度および/または回転方向を推定すること
を含む。
−誘導機の固定子電圧を制御して、誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成し、
−電圧空間ベクトルの長さを制御して、以下の条件:a)固定子電流によって構成された電流空間ベクトルが所定の長さを有する、b)電流空間ベクトルは、電圧空間ベクトルと平行な所定のd成分を有する、のいずれか一方を満たすように誘導機の固定子電流を調節し、
−誘導機の回転子の回転速度および/または回転子の回転方向を、電流空間ベクトルのq成分の波形に基づいて推定し、q成分は電圧空間ベクトルに垂直である
ようにプログラム可能なプロセッサを制御するためにコンピュータで実行可能な命令を含む。
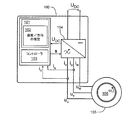
101 装置
102 処理システム
103 コントローラ
104 変換器段
105 誘導機
106 回転子
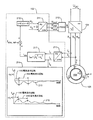
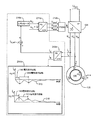
210、211、212、213、214、217 機能ブロック
210b、211b、212b、213b、214b 機能ブロック
215、216 波形
UDC DC電圧
uu、uv、uw 固定子電圧
iu、iv、iw 固定子電流
ωr 回転速度
s スイッチ制御値
ud、uq 電圧空間ベクトル
uuref、uvref、uwref 基準固定子電圧
iabs 電流空間ベクトルの長さ
iabs,ref 電流空間ベクトルの所定の長さ
id 電流空間ベクトルのd成分
iq 電流空間ベクトルのq成分
Claims (14)
- 装置(101)であって、
−誘導機(105)の固定子電圧(uu、uv、uw)を制御して、前記誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成し、
−前記電圧空間ベクトルの長さを制御して、前記固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たすように前記誘導機の固定子電流(iu、iv、iw)を調節し、
−電流空間ベクトルのq成分の波形に基づいて、前記誘導機の回転子(106)の回転速度、前記回転子の回転方向の少なくとも一方を推定する
ように構成された1つ以上のプロセッサ回路を用いて実行される処理システム(102)を備え、
前記電流空間ベクトルのd成分は前記電圧空間ベクトルに平行であり、前記電流空間ベクトルの前記q成分は前記電圧空間ベクトルに垂直であることを特徴とする、装置(101)。 - 前記処理システムは、前記固定子電流に関する前記条件を満たした最初の時点での前記電流空間ベクトルの前記q成分の変化方向を検知するように、かつ前記検知した変化方向に基づいて前記回転方向を判断するように構成される、請求項1に記載の装置。
- 前記処理システムは、前記固定子電流に関する前記条件を満たした最初の時点の後に発生する前記電流空間ベクトルの前記q成分の前記波形の最初の局所極値の極性を検知するように、かつ前記検知した極性に基づいて前記回転方向を判断するように構成される、請求項1または2に記載の装置。
- 前記処理システムは、前記固定子電流に関する前記条件を満たした最初の時点から、前記電流空間ベクトルの前記q成分の前記波形が前記固定子電流に関する前記条件を満たした最初の時点の後に最初の局所極値に達する瞬間までの経過時間を示す第1の時間値を測定するように、かつ前記測定した第1の時間値に基づいて前記回転速度を推定するように構成される、請求項1〜3のいずれか一項に記載の装置。
- 前記処理システムは、前記電流空間ベクトルの前記q成分の前記波形の2つの局所最大値の間または2つの局所最小値の間に経過した時間を示す少なくとも1つの第2の時間値を測定するように、かつ前記測定した少なくとも1つの第2の時間値に基づいて前記回転速度を推定するように構成される、請求項1〜4のいずれか一項に記載の装置。
- 前記処理システムは、前記電流空間ベクトルの前記q成分の前記波形に基づいて前記回転速度を推定し、続いて前記推定した回転速度で前記電流空間ベクトルを回転させるように前記固定子電圧を制御するように構成される、請求項1〜5のいずれか一項に記載の装置。
- 前記処理システムは、前記電流空間ベクトルが回転するときの前記固定子電圧、前記固定子電流、および固定子抵抗に基づいて、前記誘導機の空隙電力が流れる方向を推定するように、かつ前記推定した流れる方向が前記誘導機の前記回転子に向かっているときに前記電流空間ベクトルの前記回転速度を下げ、前記推定した流れる方向が前記誘導機の前記回転子から外れているときに前記電流空間ベクトルの前記回転速度を上げるように構成される、請求項6に記載の装置。
- 前記処理システムは、
−前記固定子電流に関する前記条件を満たした最初の時点の後で前記電流空間ベクトルの前記q成分の前記波形が所定期間内に局所極値に達しているかどうかを監視し、
−前記電流空間ベクトルの前記q成分が前記所定期間内に局所極値に達していない状況に応答して、前記所定期間に発生した磁束を有する前記誘導機の挙動に基づいて、前記回転速度と前記回転方向の少なくとも一方を推定する
ように構成される、請求項1〜7のいずれか一項に記載の装置。 - 前記固定子電流に関する前記条件は、前記電流空間ベクトルが前記所定の長さを有し、前記所定の長さが前記誘導機の公称電流のピーク値の30%〜100%の範囲内であることである、請求項1〜8のいずれか一項に記載の装置。
- 前記固定子電流に関する前記条件は、前記電流空間ベクトルが前記所定のd成分を有し、前記所定のd成分が前記誘導機の公称電流のピーク値の20%〜70%の範囲内であることである、請求項1〜8のいずれか一項に記載の装置。
- −誘導機(105)の固定子電圧を形成する変換器段(104)、
−少なくとも部分的に前記誘導機の固定子電流に基づいて前記固定子電圧を制御するコントローラ(103)、および
−前記誘導機の回転子(106)の回転速度と前記回転子の回転方向の少なくとも一方を推定する請求項1〜10のいずれか一項に記載の装置(101)
を含む、電子式電力変換器(100)。 - 方法であって、前記方法は、
−誘導機(105)の固定子電圧(uu、uv、uw)を制御して、前記誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成すること(301)、
−前記電圧空間ベクトルの長さを制御して、前記誘導機の固定子電流(iu、iv、iw)を調節して、前記固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たすこと(302)、および
−前記電流空間ベクトルのq成分の波形に基づいて、前記誘導機の回転子(106)の回転速度と前記回転子の回転方向の少なくとも一方を推定すること(303)
を含み、
前記電流空間ベクトルのd成分は前記電圧空間ベクトルに平行であり、前記電流空間ベクトルの前記q成分は前記電圧空間ベクトルに垂直である
ことを特徴とする、方法。 - コンピュータプログラムであって、前記コンピュータプログラムは、
−誘導機(105)の固定子電圧(uu、uv、uw)を制御して、前記誘導機の固定子に対して方向が一定の電圧空間ベクトルを構成し、
−前記電圧空間ベクトルの長さを制御して前記誘導機の固定子電流(iu、iv、iw)を調節し、前記固定子電流によって構成された電流空間ベクトルが所定の長さを有するという条件を満たし、
−前記電流空間ベクトルのq成分の波形に基づいて、前記誘導機の回転子(106)の回転速度と前記回転子の回転方向の少なくとも一方を推定する
ようにプログラム可能なプロセッサを制御するためにコンピュータで実行可能な命令を含み、
前記電流空間ベクトルのd成分は前記電圧空間ベクトルに平行であり、前記電流空間ベクトルの前記q成分は前記電圧空間ベクトルに垂直である
ことを特徴とする、コンピュータプログラム。 - 請求項13に記載のコンピュータプログラムで符号化された不揮発性コンピュータ可読媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19171846.9A EP3734831B1 (en) | 2019-04-30 | 2019-04-30 | Device and method for determining rotation of an induction machine |
| EP19171846.9 | 2019-04-30 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020184873A true JP2020184873A (ja) | 2020-11-12 |
| JP7569156B2 JP7569156B2 (ja) | 2024-10-17 |
Family
ID=66334295
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020065542A Active JP7569156B2 (ja) | 2019-04-30 | 2020-04-01 | 誘導機の回転を判断する装置および方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11114966B2 (ja) |
| EP (1) | EP3734831B1 (ja) |
| JP (1) | JP7569156B2 (ja) |
| KR (1) | KR20200127125A (ja) |
| CN (1) | CN111865162B (ja) |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2614481B1 (fr) * | 1987-02-13 | 1990-08-31 | Pk I | Procede de commande d'un moteur asynchrone et entrainement electrique mettant ce procede en application |
| US5559419A (en) * | 1993-12-22 | 1996-09-24 | Wisconsin Alumni Research Foundation | Method and apparatus for transducerless flux estimation in drives for induction machines |
| US7539549B1 (en) * | 1999-09-28 | 2009-05-26 | Rockwell Automation Technologies, Inc. | Motorized system integrated control and diagnostics using vibration, pressure, temperature, speed, and/or current analysis |
| DE19919752C5 (de) * | 1999-04-29 | 2010-12-16 | Sew-Eurodrive Gmbh & Co. Kg | Verfahren zum Zuschalten eines Umrichters an einen Asynchronmotor |
| US6239575B1 (en) * | 2000-02-11 | 2001-05-29 | Ford Motor Company | Induction motor power/torque clamping for electric vehicle performance |
| DE60318066T2 (de) * | 2002-07-08 | 2008-04-10 | Kabushiki Kaisha Yaskawa Denki, Kitakyushu | Sensorloses vektorsteuerverfahren für einen wechselstromgenerator und steuereinrichtung dafür |
| US7141949B2 (en) * | 2005-03-07 | 2006-11-28 | Fisher & Paykel Appliances Limited | Low noise back EMF sensing brushless DC motor |
| JP4539689B2 (ja) * | 2007-07-26 | 2010-09-08 | 株式会社安川電機 | 交流電動機の制御方法および制御装置 |
| US8102140B2 (en) * | 2008-05-16 | 2012-01-24 | Schneider Electric USA, Inc. | Method and apparatus for estimating induction motor electrical parameters |
| EP2192413A1 (en) * | 2008-12-01 | 2010-06-02 | ABB Oy | Method and apparatus for estimating a rotation speed of an electric motor |
| CN101650390B (zh) * | 2009-08-31 | 2011-11-23 | 苏州经贸职业技术学院 | 表面式交流永磁同步电机的定子电感参数在线测量方法 |
| US8536811B2 (en) * | 2010-10-21 | 2013-09-17 | Hamilton Sundstrand Corporation | Engagement of a spinning AC induction motor |
| JP6177623B2 (ja) * | 2013-08-09 | 2017-08-09 | 株式会社日立産機システム | 同期電動機制御装置 |
| EP2887538B1 (de) * | 2013-12-20 | 2016-03-16 | Baumüller Nürnberg GmbH | Verfahren zur Steuerung und Regelung einer elektromagnetischen Maschine |
| JP6279507B2 (ja) * | 2015-04-07 | 2018-02-14 | 日立オートモティブシステムズ株式会社 | モータ駆動装置及び3相ブラシレスモータの相電流検出方法 |
| CN108155838A (zh) * | 2016-12-02 | 2018-06-12 | 长沙市日业电气有限公司 | 一种基于永磁同步电机开环矢量的转速追踪方法 |
| EP3340456B1 (en) * | 2016-12-21 | 2021-04-14 | Danfoss Mobile Electrification Oy | An electric system for an electromechanical power transmission chain |
-
2019
- 2019-04-30 EP EP19171846.9A patent/EP3734831B1/en active Active
-
2020
- 2020-04-01 JP JP2020065542A patent/JP7569156B2/ja active Active
- 2020-04-13 KR KR1020200044555A patent/KR20200127125A/ko not_active Withdrawn
- 2020-04-20 CN CN202010310464.8A patent/CN111865162B/zh active Active
- 2020-04-29 US US16/861,391 patent/US11114966B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20200350845A1 (en) | 2020-11-05 |
| JP7569156B2 (ja) | 2024-10-17 |
| CN111865162B (zh) | 2024-07-05 |
| US11114966B2 (en) | 2021-09-07 |
| EP3734831B1 (en) | 2022-02-02 |
| EP3734831A1 (en) | 2020-11-04 |
| KR20200127125A (ko) | 2020-11-10 |
| CN111865162A (zh) | 2020-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8362732B2 (en) | Motor phase winding fault detection method and apparatus | |
| US9825579B2 (en) | Temperature estimating apparatus for synchronous motor | |
| KR101530731B1 (ko) | 브러쉬리스 전기 머신들에서 계자 전류를 결정하기 위한 방법 및 장치 | |
| AU2013294419B2 (en) | Motor drive control device | |
| CN103518320A (zh) | 无刷电机控制装置、以及无刷电机控制方法 | |
| CN105453410B (zh) | 控制装置和使用该控制装置的交流电动机系统 | |
| CN107111284A (zh) | 检测场定向控制永磁同步电机中的故障 | |
| JP2013021843A (ja) | 永久磁石同期電動機の初期磁極位置調整装置 | |
| Horie et al. | Experimental study on a restarting procedure at coasting condition for a rotational angle sensorless PMSM | |
| JP4437151B2 (ja) | 電子整流可能なセンサレス直流モーターの始動方法 | |
| JP6203784B2 (ja) | 同期電動機の制御装置 | |
| US20110089883A1 (en) | Motor phase winding fault detection method and apparatus | |
| CN105580267A (zh) | 电力转换装置和电力转换方法 | |
| CN104521131B (zh) | 同步电动机驱动系统 | |
| JP2019140904A (ja) | インバータ制御装置 | |
| JP6562881B2 (ja) | 永久磁石同期モータの定数同定装置及び定数同定方法 | |
| JP2018098856A (ja) | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 | |
| JP2017112680A (ja) | インバータ制御装置 | |
| JP2020184873A (ja) | 誘導機の回転を判断する装置および方法 | |
| JP5405224B2 (ja) | モータ駆動装置、及びモータに備えられたロータの相対位置の判別方法 | |
| JP5257661B2 (ja) | 同期モータの制御方法及び制御装置 | |
| US20160211781A1 (en) | Motor Control System And Method Of Controlling A Motor | |
| Kroics et al. | Practical method for experimental detection of DC motor inertia to design a speed regulator | |
| JP7800860B2 (ja) | 永久磁石型電動機の停止方法 | |
| JP2019146405A (ja) | モータ制御装置及びモータ制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240130 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20240315 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20240321 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20240419 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7569156 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |