JP2020034472A - 自律的ナビゲーションのための地図システム、方法および記憶媒体 - Google Patents
自律的ナビゲーションのための地図システム、方法および記憶媒体 Download PDFInfo
- Publication number
- JP2020034472A JP2020034472A JP2018162472A JP2018162472A JP2020034472A JP 2020034472 A JP2020034472 A JP 2020034472A JP 2018162472 A JP2018162472 A JP 2018162472A JP 2018162472 A JP2018162472 A JP 2018162472A JP 2020034472 A JP2020034472 A JP 2020034472A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- map
- landmark
- server
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/14—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights having dimming means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3602—Input other than that of destination using image analysis, e.g. detection of road signs, lanes, buildings, real preceding vehicles using a camera
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3644—Landmark guidance, e.g. using POIs or conspicuous other objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3661—Guidance output on an external device, e.g. car radio
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/248—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/582—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of traffic signs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
Abstract
Description
(第1実施形態)
最初に、図1を参照して、本実施形態に係る地図システムの概略構成について説明する。
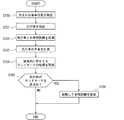
図3を参照して、主プロセッサ40が実行するフローを説明する。
図5〜図7を参照して、通信モジュール50を介してサーバ60に送信されたプローブデータに基づいて地図を生成する際のフローの一例を説明する。
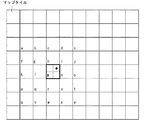
第2実施形態において記載したように、マップタイルに含まれるランドマーク63は、複数のプローブデータに基づいて座標が算出されるため、統計的ばらつきが存在する。本実施形態における地図システム100は、マップタイルごとに統計的ばらつきに基づいた精度レベルを付与する。そして、精度レベルに応じて、地図情報を利用するアプリケーションを制限する。図8を参照して、地図システム100の動作フローについて説明する。
自車両の位置を特定するにあたり、地図システム100は、GPS等の衛星による測位により自車両の大まかな位置を特定し、サーバ60からダウンロードされた地図情報と、車両によりリアルタイムに撮像された画像から算出されたランドマーク63の座標と、に基づいて詳細な自車両の位置を決定している。しかしながら、自車両がトンネル内や高層ビルの間にあって、衛星による位置特定が困難なシチュエーションが存在する。
自車両の位置を特定するにあたり、地図システム100は、GPS等の衛星による測位により自車両の大まかな位置を特定し、サーバ60からダウンロードされた地図情報と、車両によりリアルタイムに撮像された画像から算出されたランドマーク63の座標と、に基づいて詳細な自車両の位置を決定している。しかしながら、サーバ60に地図情報が存在しなかったり、地図情報が古く現状が正確に反映されていなかったりといったシチュエーションが存在する。
自車両の位置を特定するにあたり、地図システム100は、GPS等の衛星による測位により自車両の大まかな位置を特定し、サーバ60からダウンロードされた地図情報と、車両によりリアルタイムに撮像された画像から算出されたランドマーク63の座標と、に基づいて詳細な自車両の位置を決定している。しかしながら、自車両の周辺にランドマーク63の撮像を阻害する障害物が存在し、ランドマーク63の座標が特定できないシチュエーションが存在する。
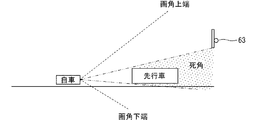
次に、ステップS603が実行される。ステップS603は、主プロセッサ40が、車両種別に基づいて障害物となる先行車の車高を取得するステップである。車高の情報は車両種別に紐付いており、先行車の車両種別に対応した車高が取得される。なお、車高の情報は撮像された画像から算出されてもよい。
第6実施形態では、障害物たる先行車の車両種別を取得して、その車両種別に基づいて車両を制御する例について説明した。これに対して、本実施形態における地図システム100は、リアルタイムに計測された車間距離と画像認識により算出された車高とに基づいて、ランドマーク63が認識可能なように車両を制御するものである。図12〜図14を参照して、本実施形態における地図システム100の動作フローについて説明する。なお、第6実施形態と同様に、本実施形態でも車両の前方の環境を撮像するために設置されたカメラ10を例に説明する。カメラ10は前方を監視するものの他、後方監視、側方監視を担うカメラ10が共存していても良い。また、ランドマーク63を遮る障害物として先行車を例に説明するが、障害物としては、後方監視用のカメラ10に対応した後続車であることもあるし、側方監視用のカメラ10に対応した並走車であることもある。また、車両以外のオブジェクトである場合もある。
ランドマーク63の座標が特定しにくくなるシチュエーションは、自車両の周辺にランドマーク63の撮像を阻害する障害物が存在する場合だけとは限らない。例えば、トンネル内や夜間など、車両の周辺環境が比較的暗い場合にも、カメラ10によるランドマーク63の検出および座標の算出が困難となる場合がある。
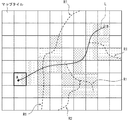
地図情報のサーバ60からのダウンロードは、サーバ60と車両との間の限られた通信帯域の中で実行される必要があり、効率的な通信が要求される。本実施形態では、地図情報のダウンロードに係り、効率的に、漏れなくマップタイルのダウンロードを実現できる地図システム100について説明する。
図17および図18を参照して具体的なフローについて説明する。図17に示すように、まず、ステップS900が実行される。ステップS900は、ステップS900は、主プロセッサ40がGPS等により自車両の大まかな位置を特定するステップである。このステップにより、自車両が存在する地域が把握される。
次いで、目的地が設定されている場合のフローについて、図19および図20を参照して具体的に説明する。
効率的にダウンロードすることができる。
この明細書および図面等における開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品および/または要素の組み合わせに限定されない。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品および/または要素が省略されたものを包含する。開示は、ひとつの実施形態と他の実施形態との間における部品および/または要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示されるいくつかの技術的範囲は、請求の範囲の記載によって示され、さらに請求の範囲の記載と均等の意味及び範囲内での全ての変更を含むものと解されるべきである。
Claims (9)
- 道路セグメント(62)に沿って車両を自律的にナビゲートするためのシステムであって、
少なくとも1つのプロセッサ(20,40,61)を含み、
前記プロセッサは、
撮像装置(10)から、前記車両の環境を表す少なくとも1つの画像を取得することと、
前記車両の環境の明るさを取得することと、
前記画像を解析して、前記車両が走行した道路に対するランドマーク(63)の位置を算出することと、
前記ランドマークの位置の情報を含む地図情報をサーバ(60)にアップロードすることと、
前記画像に基づいて算出された前記ランドマークの位置と、前記サーバに格納された地図情報とに基づいて自車両の位置を決定することと、を実行するようにされ、
前記明るさが所定の閾値以下であるとき、前記ランドマークの存在が想定される方向に向かって照明光を照射する、システム。 - 前記照明光は、前記車両に搭載され、前記車両の前方を照らすライトにより照射される、請求項1に記載のシステム。
- 前記照明光は、先行車あるいは対向車を避けて照射される、請求項1または請求項2に記載のシステム。
- 道路セグメント(62)に沿って車両を自律的にナビゲートするための方法であって、
撮像装置(10)から、前記車両の環境を表す少なくとも1つの画像を取得すること、
前記車両の環境の明るさを取得すること、
前記画像を解析して、前記車両が走行した道路に対するランドマーク(63)の位置を算出すること、
前記ランドマークの位置の情報を含む地図情報をサーバ(60)にアップロードすること、
前記画像に基づいて算出された前記ランドマークの位置と、前記サーバに格納された地図情報とに基づいて自車両の位置を決定すること、を備え、
前記明るさが所定の閾値以下であるとき、前記ランドマークの存在が想定される方向に向かって照明光を照射する、方法。 - 前記照明光は、前記車両に搭載され、前記車両の前方を照らすライトにより照射される、請求項4に記載のシステム。
- 前記照明光は、先行車あるいは対向車を避けて照射される、請求項4または請求項5に記載のシステム。
- 道路セグメント(62)に沿って車両を自律的にナビゲートするために、少なくとも1つのプロセッサ(20,40,61)にプログラムを実行させる非一過性コンピュータ可読記憶媒体であって、
前記プログラムは、
撮像装置(10)から、前記車両の環境を表す少なくとも1つの画像を取得することと、
前記車両の環境の明るさを取得することと、
前記画像を解析して、前記車両が走行した道路に対するランドマーク(63)の位置を算出することと、
前記ランドマークの位置の情報を含む地図情報をサーバ(60)にアップロードすることと、
前記画像に基づいて算出された前記ランドマークの位置と、前記サーバに格納された地図情報とに基づいて自車両の位置を決定することと、を前記プロセッサに実行させるようにされ、
前記明るさが所定の閾値以下であるとき、前記ランドマークの存在が想定される方向に向かって照明光を照射する、非一過性コンピュータ可読記憶媒体。 - 前記照明光は、前記車両に搭載され、前記車両の前方を照らすライトにより照射される、請求項7に記載の非一過性コンピュータ可読記憶媒体。
- 前記照明光は、先行車あるいは対向車を避けて照射される、請求項7または請求項8に記載の非一過性コンピュータ可読記憶媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018162472A JP2020034472A (ja) | 2018-08-31 | 2018-08-31 | 自律的ナビゲーションのための地図システム、方法および記憶媒体 |
| PCT/JP2019/033203 WO2020045317A1 (ja) | 2018-08-31 | 2019-08-26 | 地図システム、方法および記憶媒体 |
| US17/185,665 US11410332B2 (en) | 2018-08-31 | 2021-02-25 | Map system, method and non-transitory computer-readable storage medium for autonomously navigating vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018162472A JP2020034472A (ja) | 2018-08-31 | 2018-08-31 | 自律的ナビゲーションのための地図システム、方法および記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020034472A true JP2020034472A (ja) | 2020-03-05 |
| JP2020034472A5 JP2020034472A5 (ja) | 2021-02-04 |
Family
ID=69644143
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018162472A Pending JP2020034472A (ja) | 2018-08-31 | 2018-08-31 | 自律的ナビゲーションのための地図システム、方法および記憶媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11410332B2 (ja) |
| JP (1) | JP2020034472A (ja) |
| WO (1) | WO2020045317A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10816354B2 (en) | 2017-08-22 | 2020-10-27 | Tusimple, Inc. | Verification module system and method for motion-based lane detection with multiple sensors |
| US11009356B2 (en) | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization and fusion |
| US11009365B2 (en) | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization |
| JP7167876B2 (ja) | 2018-08-31 | 2022-11-09 | 株式会社デンソー | 地図生成システム、サーバ、方法 |
| JP7067536B2 (ja) | 2018-08-31 | 2022-05-16 | 株式会社デンソー | 車両制御装置、方法および記憶媒体 |
| JP7156206B2 (ja) | 2018-08-31 | 2022-10-19 | 株式会社デンソー | 地図システム、車両側装置、およびプログラム |
| JP7147712B2 (ja) * | 2018-08-31 | 2022-10-05 | 株式会社デンソー | 車両側装置、方法および記憶媒体 |
| JP7251394B2 (ja) | 2018-08-31 | 2023-04-04 | 株式会社デンソー | 車両側装置、方法および記憶媒体 |
| EP3884480A1 (en) * | 2018-11-21 | 2021-09-29 | Arrival Limited | Apparatus and method for warning of an oncoming vehicle |
| JP7165093B2 (ja) * | 2019-03-29 | 2022-11-02 | 本田技研工業株式会社 | 車両制御システム |
| DE102019213612A1 (de) * | 2019-09-06 | 2021-03-11 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines automatisierten Fahrzeugs |
| US11521487B2 (en) * | 2019-12-09 | 2022-12-06 | Here Global B.V. | System and method to generate traffic congestion estimation data for calculation of traffic condition in a region |
| JP7290104B2 (ja) * | 2019-12-23 | 2023-06-13 | 株式会社デンソー | 自己位置推定装置、方法及びプログラム |
| JP7429143B2 (ja) * | 2020-03-30 | 2024-02-07 | 本田技研工業株式会社 | 移動体制御装置、移動体制御方法、およびプログラム |
| EP3893150A1 (en) * | 2020-04-09 | 2021-10-13 | Tusimple, Inc. | Camera pose estimation techniques |
| US20220081003A1 (en) * | 2020-09-15 | 2022-03-17 | Tusimple, Inc. | DETECTING A CONSTRUCTION ZONE BY A LEAD AUTONOMOUS VEHICLE (AV) AND UPDATING ROUTING PLANS FOR FOLLOWING AVs |
| CN113012446B (zh) * | 2021-02-18 | 2022-04-26 | 安徽中科美络信息技术有限公司 | 一种车辆导流方法 |
| JP2022135545A (ja) * | 2021-03-05 | 2022-09-15 | トヨタ自動車株式会社 | 車載装置、情報処理装置、ダウンロード実行可否判定方法、プログラム、記録媒体 |
| JP2022137532A (ja) * | 2021-03-09 | 2022-09-22 | 本田技研工業株式会社 | 地図生成装置および位置認識装置 |
| DE102021204063A1 (de) * | 2021-04-23 | 2022-10-27 | Zf Friedrichshafen Ag | Abgleich von Kartendaten und Sensordaten |
| US11967059B2 (en) * | 2021-05-18 | 2024-04-23 | Deere &Company | Methods and apparatus to identify headlands |
| WO2023286810A1 (ja) * | 2021-07-16 | 2023-01-19 | 株式会社小糸製作所 | 静止物情報利用装置、プログラム、静止物情報利用方法、車両システム、及び静止物情報利用システム |
| WO2023286811A1 (ja) * | 2021-07-16 | 2023-01-19 | 株式会社小糸製作所 | 静止物情報蓄積システム、プログラム、及び静止物情報記憶方法 |
| WO2023286806A1 (ja) * | 2021-07-16 | 2023-01-19 | 株式会社小糸製作所 | 静止物情報取得装置、プログラム、及び静止物情報取得方法 |
| US20230035780A1 (en) * | 2021-07-29 | 2023-02-02 | Zoox, Inc. | Systematic fault detection in vehicle control systems |
| US11532221B1 (en) * | 2021-08-05 | 2022-12-20 | Ford Global Technologies, Llc | System and method for vehicle security monitoring |
| CN114199233B (zh) * | 2021-11-08 | 2024-04-05 | 北京旷视科技有限公司 | 位姿确定方法及可移动设备 |
| CN114572102B (zh) * | 2022-01-28 | 2023-07-14 | 上海康耐司信号设备有限公司 | 一种适用于车灯的智能调节系统及方法 |
| CN115290086B (zh) * | 2022-08-10 | 2023-07-07 | 国能榆林能源有限责任公司 | 基于本安型惯性导航的地下巷道环境定位方法和系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283219A (ja) * | 2004-03-29 | 2005-10-13 | Clarion Co Ltd | 車両走行道路判定方法、車両走行道路判定装置およびナビゲーションシステム |
| JP2010163141A (ja) * | 2009-01-19 | 2010-07-29 | Koito Mfg Co Ltd | 車両用前照灯装置 |
| JP2017036980A (ja) * | 2015-08-10 | 2017-02-16 | 日産自動車株式会社 | 自己位置推定装置及び自己位置推定方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4765503B2 (ja) * | 2005-09-16 | 2011-09-07 | 株式会社日立製作所 | 通信端末及びナビゲーションシステム |
| DE102012210467A1 (de) * | 2012-06-21 | 2013-12-24 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur automatischen Anpassung einer Fahrzeugbeleuchtung an eine Umgebung des Fahrzeugs |
| KR102622571B1 (ko) | 2015-02-10 | 2024-01-09 | 모빌아이 비젼 테크놀로지스 엘티디. | 자율 주행을 위한 약도 |
| JP7111708B2 (ja) * | 2017-06-27 | 2022-08-02 | 株式会社小糸製作所 | 車両用灯具システム、車両用灯具の制御装置及び車両用灯具の制御方法 |
| WO2020045322A1 (ja) | 2018-08-31 | 2020-03-05 | 株式会社デンソー | 地図システム、車両側装置、方法および記憶媒体 |
| WO2020045318A1 (ja) | 2018-08-31 | 2020-03-05 | 株式会社デンソー | 車両側装置、サーバ、方法および記憶媒体 |
| WO2020045319A1 (ja) | 2018-08-31 | 2020-03-05 | 株式会社デンソー | 車両制御装置、方法および記憶媒体 |
| WO2020045323A1 (ja) | 2018-08-31 | 2020-03-05 | 株式会社デンソー | 地図生成システム、サーバ、車両側装置、方法、および記憶媒体 |
| WO2020045324A1 (ja) | 2018-08-31 | 2020-03-05 | 株式会社デンソー | 車両側装置、方法および記憶媒体 |
-
2018
- 2018-08-31 JP JP2018162472A patent/JP2020034472A/ja active Pending
-
2019
- 2019-08-26 WO PCT/JP2019/033203 patent/WO2020045317A1/ja active Application Filing
-
2021
- 2021-02-25 US US17/185,665 patent/US11410332B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283219A (ja) * | 2004-03-29 | 2005-10-13 | Clarion Co Ltd | 車両走行道路判定方法、車両走行道路判定装置およびナビゲーションシステム |
| JP2010163141A (ja) * | 2009-01-19 | 2010-07-29 | Koito Mfg Co Ltd | 車両用前照灯装置 |
| JP2017036980A (ja) * | 2015-08-10 | 2017-02-16 | 日産自動車株式会社 | 自己位置推定装置及び自己位置推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11410332B2 (en) | 2022-08-09 |
| WO2020045317A1 (ja) | 2020-03-05 |
| US20210183099A1 (en) | 2021-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020034472A (ja) | 自律的ナビゲーションのための地図システム、方法および記憶媒体 | |
| JP7251394B2 (ja) | 車両側装置、方法および記憶媒体 | |
| JP7067536B2 (ja) | 車両制御装置、方法および記憶媒体 | |
| JP7167876B2 (ja) | 地図生成システム、サーバ、方法 | |
| JP7156206B2 (ja) | 地図システム、車両側装置、およびプログラム | |
| JP7147712B2 (ja) | 車両側装置、方法および記憶媒体 | |
| RU2642547C1 (ru) | Система определения обновления карт | |
| WO2020045323A1 (ja) | 地図生成システム、サーバ、車両側装置、方法、および記憶媒体 | |
| KR102499421B1 (ko) | 운전자 지원을 위한 시스템 및 방법 | |
| KR102611927B1 (ko) | 주행 환경 정보의 생성 방법, 운전 제어 방법, 주행 환경 정보 생성 장치 | |
| US20170227971A1 (en) | Autonomous travel management apparatus, server, and autonomous travel management method | |
| WO2020045318A1 (ja) | 車両側装置、サーバ、方法および記憶媒体 | |
| KR101744781B1 (ko) | 도로의 형상 인식을 통한 예측 변속 제어 방법 | |
| WO2020045322A1 (ja) | 地図システム、車両側装置、方法および記憶媒体 | |
| WO2020045324A1 (ja) | 車両側装置、方法および記憶媒体 | |
| CN114729813A (zh) | 用于车辆导航的系统和方法 | |
| US10783384B2 (en) | Object detection using shadows | |
| JP2009500765A (ja) | 交通情報を判定する方法及びその方法を実行するように構成された装置 | |
| WO2020045319A1 (ja) | 車両制御装置、方法および記憶媒体 | |
| US20230159050A1 (en) | Systems and methods for vehicle speed and lateral position control | |
| JP2023509292A (ja) | 信号機を検出するためのシステムおよび方法 | |
| CN116171464A (zh) | 信号灯识别装置、信号灯识别方法、车辆控制装置 | |
| CN117571001A (zh) | 用于公共速度映射和导航的系统和方法 | |
| US20210063169A1 (en) | Method and device for creating a map | |
| JP7247491B2 (ja) | 自律的ナビゲーションのための地図システム、方法および記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220221 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220426 |