JP2020008029A - 流体圧制御システム - Google Patents
流体圧制御システム Download PDFInfo
- Publication number
- JP2020008029A JP2020008029A JP2018126527A JP2018126527A JP2020008029A JP 2020008029 A JP2020008029 A JP 2020008029A JP 2018126527 A JP2018126527 A JP 2018126527A JP 2018126527 A JP2018126527 A JP 2018126527A JP 2020008029 A JP2020008029 A JP 2020008029A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- pump
- displacement
- side chamber
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Abstract
【課題】流体圧アクチュエータの作動を安定させる。【解決手段】流体圧制御システム100のコントローラ50は、第2ポンプ32から反ロッド側室20bに作動油を供給し第1ポンプ31によりロッド側室20aから作動油を排出することによりアームシリンダ11を駆動させる場合には、第1圧力センサ61の検出値が第1目標圧力となるように第1ポンプ31及び第2ポンプ32の少なくとも一方の容量を制御し、第1ポンプ31からロッド側室20aに作動油を供給し第2ポンプ32により反ロッド側室20bから作動油を排出することによりアームシリンダ11を駆動させる場合には、第2圧力センサ62の検出値が第2目標圧力となるように第1ポンプ31及び第2ポンプ32の少なくとも一方の容量を制御する。【選択図】図2
Description
本発明は、流体圧制御システムに関する。
特許文献1には、流体圧アクチュエータとしての流体圧シリンダと、流体圧シリンダのロッド側室及び反ロッド側室に対して作動流体を給排するポンプと、を備えた流体圧制御システムが記載されている。この流体圧制御システムでは、ポンプの容量を変化させることによりロッド側室及び反ロッド側室に対する作動流体の給排量を制御することで流体圧シリンダの伸縮を制御している。
特許文献1に記載の流体圧制御システムでは、流体圧シリンダのロッド側室の受圧面積と反ロッド側室の受圧面積とに基づいてポンプの吐出量が設定される。しかし、ポンプには個体差があるため、ポンプの吐出量はポンプ毎にわずかに異なる。また、ポンプの吐出量は、シール部の経年劣化等によっても変化する。このため、ロッド側室及び反ロッド側室に対して設定通りの流量を給排することができず、何れかの流量が過多または過少となるおそれがある。このように給排される流量にずれが生じると、ロッド側室及び反ロッド側室内の圧力が異常に上昇したり、負圧となってキャビテーションが発生したりすることで流体圧シリンダの作動が不安定となるおそれがある。
本発明は、上記の問題点に鑑みてなされたものであり、流体圧制御システムにおいて、流体圧アクチュエータの作動を安定させることを目的とする。
本発明は、流体圧制御システムが、第1圧力室及び第2圧力室を有し第1圧力室及び第2圧力室に対して作動流体が給排されることで駆動する流体圧アクチュエータと、第1圧力室に対して作動流体を給排可能な両方向型の第1ポンプと、第2圧力室に対して作動流体を給排可能な両方向型の第2ポンプと、第1ポンプ及び第2ポンプを駆動する駆動源と、駆動源の駆動を制御するコントローラと、第1圧力室の圧力を検出する第1圧力検出器と、第2圧力室の圧力を検出する第2圧力検出器と、を備え、コントローラが、第2ポンプから第2圧力室に作動流体を供給し第1ポンプにより第1圧力室から作動流体を排出することにより流体圧アクチュエータを駆動させる場合には、第1圧力検出器の検出値が予め定められた大気圧以上の第1目標圧力となるように第1ポンプ及び第2ポンプの少なくとも一方の容量を制御し、第1ポンプから第1圧力室に作動流体を供給し第2ポンプにより第2圧力室から作動流体を排出することにより流体圧アクチュエータを駆動させる場合には、第2圧力検出器の検出値が予め定められた大気圧以上の第2目標圧力となるように第1ポンプ及び第2ポンプの少なくとも一方の容量を制御することを特徴とする。
この発明では、流体圧アクチュエータが駆動される際に作動流体が排出される圧力室の圧力の大きさが大気圧以上の所定の目標圧力となるように第1ポンプまたは第2ポンプの容量が制御される。このように、作動流体が排出される圧力室の圧力の大きさが負圧ではない所定の大きさとなるように第1ポンプまたは第2ポンプの容量を制御することによって、圧力室に供給される作動流体の流量が過多または過少となることが防止される。この結果、圧力室の圧力が異常に上昇したり、圧力室の圧力が負圧となってキャビテーションが発生したりすることが抑制される。
本発明は、第1ポンプ及び第2ポンプの一方は可変容量ポンプであり、他方は固定容量ポンプであることを特徴とする。
この発明では、第1ポンプ及び第2ポンプの一方が可変容量ポンプであり、他方が固定容量ポンプである。このように、比較的構造が簡素で安価な固定容量ポンプを用いることによって、流体圧制御システムの製造コストを低減させることができる。
本発明は、流体圧アクチュエータが、ロッド側室と反ロッド側室とを有する片ロッド型のシリンダであり、第1ポンプはロッド側室に対して作動流体を給排可能な可変容量ポンプであり、第2ポンプは反ロッド側室に対して作動流体を給排可能な固定容量ポンプであり、第1ポンプの最大容量は、第2ポンプの容量よりも小さいことを特徴とする。
この発明では、容積が小さいロッド側室に対して作動流体を給排するポンプとして可変容量ポンプが用いられ、容積が大きい反ロッド側室に対して作動流体を給排するポンプとして固定容量ポンプが用いられる。比較的構造が複雑であり高価な可変容量型ポンプの容量を小さくすることが可能となることで、流体圧制御システムを小型化することができるとともに、流体圧制御システムの製造コストを低減させることができる。
本発明は、流体圧制御システムが、流体圧アクチュエータの変位量を検出する変位量検出器をさらに備え、流体圧アクチュエータによって駆動される負荷が流体圧アクチュエータに及ぼす荷重の方向が流体圧アクチュエータの変位量に応じて切り換わる場合、コントローラは、変位量検出器の検出値に基づき、荷重の方向が切り換わるときの変位量である荷重反転変位量を境に第1目標圧力及び第2目標圧力を変更することを特徴とする。
この発明では、第1目標圧力及び第2目標圧力の大きさが、流体圧アクチュエータによって駆動される負荷が流体圧アクチュエータに及ぼす荷重の方向が切り換わるときの変位量である荷重反転変位量を境に変更される。このように、荷重反転変位量を境に第1目標圧力及び第2目標圧力の大きさを変えることによって、流体圧アクチュエータに対してどのように荷重が作用している場合であっても、圧力室が負圧となることが抑制されることで、流体圧アクチュエータの作動を安定させることができるとともに、ポンプの吐出圧が低減されることで、駆動源において無駄なエネルギーが消費されることを抑制することができる。
本発明は、流体圧制御システムが、流体圧アクチュエータの傾き、または、流体圧アクチュエータによって駆動される負荷の重心を変化させる遷移アクチュエータと、遷移アクチュエータの変位量を検出する遷移変位量検出器と、をさらに備え、コントローラが、遷移変位量検出器の検出値に基づいて荷重反転変位量を演算することを特徴とする。
この発明では、荷重反転変位量が遷移変位量検出器の検出値に基づいて演算される。このように、流体圧アクチュエータの傾き、または、流体圧アクチュエータによって駆動される負荷の重心を変化させる遷移アクチュエータの変位量に基づいて荷重反転変位量を演算することによって、負荷が流体圧アクチュエータに及ぼす荷重の方向が切り換わるタイミングを精度よく求めることが可能となる。
本発明は、流体圧制御システムが、流体圧アクチュエータが設けられる装置の重力方向に対する傾きを検出する傾斜検出器をさらに備え、コントローラが、傾斜検出器の検出値に基づいて荷重反転変位量を演算することを特徴とする。
この発明では、荷重反転変位量が傾斜検出器の検出値に基づいて演算される。このように、流体圧アクチュエータの傾き、または、流体圧アクチュエータによって駆動される負荷の重心を変化させる装置の傾きに基づいて荷重反転変位量を演算することによって、負荷が流体圧アクチュエータに及ぼす荷重の方向が切り換わるタイミングを精度よく求めることが可能となる。
本発明によれば、流体圧制御システムにおいて、流体圧アクチュエータの作動を安定させることができる。
以下、図面を参照して、本発明の実施形態に係る流体圧制御システム100について説明する。
流体圧制御システム100は、可動部材等の負荷を駆動する流体圧アクチュエータを有する建設機械や工作機械といった産業機械に適用され、流体圧アクチュエータの作動を制御するものである。以下では、流体圧制御システム100が、建設機械である油圧ショベル1に設けられる流体圧アクチュエータの作動を制御する場合について説明する。
まず、図1を参照して、本発明の実施形態に係る流体圧制御システム100が適用される油圧ショベル1について説明する。
油圧ショベル1は、クローラ式の走行部2と、走行部2の上部に旋回可能に設けられる旋回部3と、旋回部3の前方中央部に設けられる掘削部5と、を備える。旋回部3には、作業者が搭乗するキャビン3aが設けられる。
走行部2は、走行モータ(図示省略)によって左右一対のクローラ2aを駆動することで油圧ショベル1を走行させる。旋回部3は、旋回モータ(図示省略)によって駆動され、走行部2に対して左右方向に旋回する。
掘削部5は、旋回部3の左右方向に延びる水平軸まわりに揺動可能に取り付けられるブーム6と、ブーム6の先端に揺動可能に取り付けられるアーム7と、アーム7の先端に揺動可能に取り付けられて土砂等を掘削するバケット8と、を有する。
また、掘削部5は、ブーム6を上下に回動させるブームシリンダ10と、アーム7を上下に回動させるアームシリンダ11と、バケット8を回動させるバケットシリンダ12と、を有する。
次に、図2を参照して、流体アクチュエータとしてのアームシリンダ11と、アームシリンダ11の作動を制御する流体圧制御システム100について説明する。
アームシリンダ11は、作動流体としての作動油が出入りするシリンダ20と、シリンダ20内に往復動自在に設けられたピストンロッド22と、シリンダ20内に摺動自在に収容されピストンロッド22に連結されるピストン21と、を有する片ロッド型の油圧シリンダである。シリンダ20の内部は、ピストン21によって第1圧力室としてのロッド側室20aと第2圧力室としての反ロッド側室20bとの2つの油圧室に仕切られる。アームシリンダ11は、ロッド側室20a及び反ロッド側室20bに対して作動油が給排されることで伸縮し、負荷Wであるアーム7及びアーム7に連結されたバケット8等を変位させる。
流体圧制御システム100は、ロッド側室20aに対して作動油を給排可能な両方向型の第1ポンプ31と、反ロッド側室20bに対して作動油を給排可能な両方向型の第2ポンプ32と、第1ポンプ31及び第2ポンプ32を駆動する駆動源としての電動モータ41と、を備える。
第1ポンプ31は、図示しない斜板の傾転角度に応じて吐出容量が変化する可変容量型のポンプである。斜板の傾転角度は、レギュレータ31aによって制御される。つまり、第1ポンプ31の吐出容量は、レギュレータ31aに入力される指令信号に応じて変化する。なお、第1ポンプ31は、斜板式の可変容量ポンプに限定されず、例えば、可変容量ベーンポンプ等のように吐出容量が可変なものであれば、どのような形式のポンプであってもよい。
第1ポンプ31は、2つのポンプポートを有し、一方のポンプポートは、第1通路34を通じてロッド側室20aに接続され、他方のポンプポートは、作動油が貯留されたタンク33に接続される。
第2ポンプ32は、吐出容量が一定の固定容量型のポンプである。第2ポンプ32も、第1ポンプ31と同様に2つのポンプポートを有し、一方のポンプポートは、第2通路35を通じて反ロッド側室20bに接続され、他方のポンプポートは、タンク33に接続される。
第1ポンプ31及び第2ポンプ32は、電動モータ41によって回転駆動される駆動軸36に連結されている。つまり、第1ポンプ31及び第2ポンプ32は、単一の電動モータ41によって回転駆動される。なお、第1ポンプ31及び第2ポンプ32は、駆動軸36に対して減速機等を介して連結されていてもよい。
駆動軸36が電動モータ41によって一方の方向(図2に示される矢印Aの方向)に回転駆動されると、第2ポンプ32は、タンク33から吸入された作動油を反ロッド側室20bへと供給し、第1ポンプ31は、ロッド側室20a内の作動油を吸引してタンク33へと排出する。このように反ロッド側室20bに作動油が供給されロッド側室20aから作動油が排出されることによってアームシリンダ11は伸長する。
一方、駆動軸36が電動モータ41によって反対の方向(図2に示される矢印Bの方向)に回転駆動されると、第2ポンプ32は、反ロッド側室20b内の作動油を吸引してタンク33へと排出し、第1ポンプ31は、タンク33から吸入された作動油をロッド側室20aへと供給する。このようにロッド側室20aに作動油が供給され反ロッド側室20bから作動油が排出されることによってアームシリンダ11は収縮する。
このように、アームシリンダ11の作動方向は、電動モータ41の回転方向を切り換えることによって切り換えることが可能である。また、電動モータ41の回転速度を増減させると第1ポンプ31及び第2ポンプ32の吐出流量、すなわちアームシリンダ11に対して給排される作動油の流量も増減することから、電動モータ41の回転数を変化させることによってアームシリンダ11の作動速度を増減させることが可能である。電動モータ41の回転方向及び回転数は、出力電圧の大きさ及び周波数を変更自在なインバータ42によって電気的に制御される。なお、第1ポンプ31及び第2ポンプ32を駆動する駆動源としては、電動モータ41に限定されず、回転方向が切り換え可能な駆動源であればどのような形式のものであってもよく、例えば、油圧モータであってもよい。
また、上述のように、第1ポンプ31は、第2ポンプ32から作動油が供給される反ロッド側室20bよりも容積が小さいロッド側室20aに作動油を供給するものである。このため、第1ポンプ31の最大容量は、第2ポンプ32の容量よりも小さく設定される。
このように第1ポンプ31の最大容量を小さくすることで、比較的構造が複雑な可変容量型のポンプである第1ポンプ31を小型化することができるとともに、第1ポンプ31のコストを低減させることができる。なお、第1ポンプ31の最大容量と第2ポンプ32の容量とは同じであってもよいし、第1ポンプ31の最大容量を第2ポンプ32の容量よりも大きくしてもよい。
また、流体圧制御システム100は、ロッド側室20aの圧力を検出する第1圧力検出器として第1圧力センサ61と、反ロッド側室20bの圧力を検出する第2圧力検出器として第2圧力センサ62と、アームシリンダ11の変位量を検出する変位量検出器としての第1変位センサ63と、作業者が操作する操作装置64と、操作装置64の操作量及び操作方向に応じて電動モータ41の駆動を制御するコントローラ50と、をさらに備える。
第1圧力センサ61は、ゲージ圧センサであり、ロッド側室20aに連通する第1通路34に設けられ、第1通路34内の作動油の圧力をロッド側室20aの圧力として検出する。第1圧力センサ61は、検出されたロッド側室20aの圧力に対応する電圧信号をコントローラ50へ出力する。なお、第1圧力センサ61は、シリンダ20に取り付けられ、ロッド側室20aの圧力を直接検出するものであってもよい。また、第1圧力センサ61は、絶対圧センサであってもよいが、その場合は、大気圧センサが別途設けられる。
第2圧力センサ62は、ゲージ圧センサであり、反ロッド側室20bに連通する第2通路35に設けられ、第2通路35内の作動油の圧力を反ロッド側室20bの圧力として検出する。第2圧力センサ62は、検出された反ロッド側室20bの圧力に対応する電圧信号をコントローラ50へ出力する。なお、第2圧力センサ62は、シリンダ20に取り付けられ、反ロッド側室20bの圧力を直接検出するものであってもよい。また、第2圧力センサ62は、絶対圧センサであってもよいが、その場合は、大気圧センサが別途設けられる。
第1変位センサ63は、ピストンロッド22のストローク量を検出するストロークセンサであり、アームシリンダ11が最も収縮した状態を零とし、アームシリンダ11が最も収縮した状態からピストンロッド22がどの程度突出しているかを変位量Xとして検出する。第1変位センサ63は、検出された変位量Xに対応する電圧信号をコントローラ50に出力する。なお、第1変位センサ63は、ストロークセンサのようにピストンロッド22の突出量を直接的に検出するものであってもよいし、角度センサのように、アームシリンダ11によって駆動されるアーム7の回動角度を検出することによってピストンロッド22の突出量を間接的に検出するものであってもよい。
操作装置64は、運転席に設けられて作業者により操作されるジョイスティックである。操作装置64は、作業者により操作された操作方向及び操作量に応じた電圧信号をコントローラ50に出力する。なお、操作装置64は、ジョイスティックに限定されず、単なるレバーやスイッチ等であってもよい。また、操作装置64は、操作方向及び操作量に応じた電圧信号に加えて、操作速度に応じた電圧信号をコントローラ50に出力してもよい。
コントローラ50は、CPU(中央演算処理装置)、ROM(リードオンリメモリ)、RAM(ランダムアクセスメモリ)、及びI/Oインターフェース(入出力インターフェース)を備えたマイクロコンピュータで構成される。RAMはCPUの処理におけるデータを記憶し、ROMはCPUの制御プログラム等を予め記憶し、I/Oインターフェースは接続された機器との情報の入出力に使用される。コントローラ50は、複数のマイクロコンピュータで構成されていてもよい。
コントローラ50は、入力された第1圧力センサ61、第2圧力センサ62、第1変位センサ63及び操作装置64の検出値を用いて第1ポンプ31の吐出容量と電動モータ41の回転方向及び回転数とを演算する演算部51と、演算部51で用いられる演算式やマップ等が記憶される記憶部52と、演算部51で演算された第1ポンプ31の吐出容量に応じた指令信号をレギュレータ31aへ出力する吐出容量指令部53と、演算部51で演算された電動モータ41の回転方向及び回転数に応じた指令信号をインバータ42へ出力する回転指令部54と、を有する。各部の具体的な機能については後述する。
なお、演算部51、記憶部52、吐出容量指令部53及び回転指令部54は、コントローラ50の各機能を、仮想的なユニットとして示したものであり、物理的に存在することを意味するものではない。例えば、演算部51で行われる演算は、主にCPUにより行われ、記憶部52で行われる記憶は、RAMやROMにより行われる。
次に、上記構成の流体圧制御システム100により行われるアームシリンダ11の制御について説明する。
作業者が操作装置64を介してアーム7を回動させる操作を行うと、操作装置64は、操作方向及び操作量に応じた電圧信号をコントローラ50に出力する。
操作装置64の検出値がコントローラ50に入力されると、演算部51において、アーム7を下方に向けて回動させる操作、すなわち、アームシリンダ11を伸長させる操作が行われたか、あるいは、アーム7を上方に向けて回動させる操作、すなわち、アームシリンダ11を収縮させる操作が行われたかが判定される。
演算部51において、アームシリンダ11を伸長させる操作が行われたと判定された場合、コントローラ50は、回転指令部54を介して、電動モータ41を矢印Aの方向に回転させるように電動モータ41の回転方向を指定する指令信号をインバータ42へ出力する。一方、演算部51において、アームシリンダ11を収縮させる操作が行われたと判定された場合、コントローラ50は、回転指令部54を介して、電動モータ41を矢印Bの方向に回転させるように電動モータ41の回転方向を指定する指令信号をインバータ42へ出力する。
また、演算部51では、操作装置64の操作量から要求されるアームシリンダ11の伸縮速度が演算される。演算部51で演算された伸縮速度に応じてコントローラ50は、回転指令部54を介して、電動モータ41の目標回転数を指定する指令信号をインバータ42へ出力する。電動モータ41の目標回転数は、演算された伸縮速度が速いほど高く、遅いほど低く設定される。
コントローラ50から指令信号を受け取ると、インバータ42は、指令信号において指定された回転方向及び目標回転数に応じた周波数の電圧を電動モータ41へと供給し、電動モータ41を回転させる。
電動モータ41の回転に伴って駆動軸36が回転駆動されると、駆動軸36に連結された第1ポンプ31及び第2ポンプ32も回転し、アームシリンダ11に対する作動油の給排が開始される。
駆動軸36が矢印Aの方向に回転すると、上述のように、第2ポンプ32は、タンク33から吸入された作動油を反ロッド側室20bへと供給し、第1ポンプ31は、ロッド側室20a内の作動油を吸引してタンク33へと排出する。このように反ロッド側室20bに作動油が供給されロッド側室20aから作動油が排出されることによってアームシリンダ11は伸長する。
ここで、アームシリンダ11を円滑に伸長させるには、第2ポンプ32から反ロッド側室20bに供給される作動油の流量と、第1ポンプ31によりロッド側室20aから排出される作動油の流量と、の比率が、反ロッド側室20bの受圧面積と、ロッド側室20aの受圧面積と、の比率と一致するように第1ポンプ31及び第2ポンプ32の容量を設定しなければならない。
しかし、通常、ポンプには個体差があり、ポンプの容量はポンプ毎にわずかに異なるため、正確に容量を設定することは困難である。また、ポンプの容量は、シール部の経年劣化等によっても変化してしまう。したがって、第1ポンプ31及び第2ポンプ32の容量を所定の大きさに設定したとしても、ポンプの個体差や経年変化によって、ロッド側室20a及び反ロッド側室20bに対して設定通りの作動油の流量を給排することができず、何れかの流量が過多または過少となる。
例えば、アームシリンダ11を伸長させる際に、第1ポンプ31によりロッド側室20aから排出される作動油の流量が設定値よりも大きいと、ロッド側室20aの圧力が負圧となってキャビテーションが発生し、アームシリンダ11の作動が不安定になるおそれがある。また、ロッド側室20aの圧力が低くなると、ピストン21が反ロッド側室20bを拡張させるように移動することになるため、反ロッド側室20bへの作動油の供給が追い付かず、結果として、反ロッド側室20bの圧力も負圧となってキャビテーションが発生するおそれがある。
反対に、アームシリンダ11を伸長させる際に、第1ポンプ31によりロッド側室20aから排出される作動油の流量が設定値よりも小さいと、反ロッド側室20bに供給される作動油によってピストン21がロッド側室20aを収縮させるように移動することによって、ロッド側室20aの圧力が異常に高まり、アームシリンダ11の伸長が妨げられるおそれがある。
このような状況を避けるために、流体圧制御システム100では、ロッド側室20aと反ロッド側室20bとのうち、作動油が排出される側の室の圧力が大気圧以上の所定の大きさとなるように、可変容量型のポンプである第1ポンプ31の容量を制御している。
具体的には、アームシリンダ11を伸長させる際、コントローラ50では、演算部51において、作動油が排出されるロッド側室20aの圧力を検出する第1圧力センサ61の検出値と予め設定された大気圧以上の第1目標圧力P1とを比較する。
そして、第1圧力センサ61の検出値が第1目標圧力P1よりも小さい場合、ロッド側室20aが負圧となってしまうおそれがあることから、コントローラ50は、吐出容量指令部53を介して、第1ポンプ31の容量を小さくする指令信号、すなわち、ロッド側室20aから排出される作動油の流量を低減させる指令信号をレギュレータ31aへ出力する。
反対に、第1圧力センサ61の検出値が第1目標圧力P1よりも大きい場合、ロッド側室20aが高圧となってしまうおそれがあることから、コントローラ50は、吐出容量指令部53を介して、第1ポンプ31の容量を大きくする指令信号、すなわち、ロッド側室20aから排出される作動油の流量を増大させる指令信号をレギュレータ31aへ出力する。
コントローラ50から指令信号を受け取ると、レギュレータ31aは、第1ポンプ31の容量が指令信号において指定された容量だけ変化するように、第1ポンプ31の斜板の傾転角度を変化させる。
このように、作動油が排出されるロッド側室20aの圧力が、第1目標圧力P1に一致するようにコントローラ50によってフィードバック制御を行うことによって、ロッド側室20aの圧力が負圧となってしまったり異常に上昇してしまったりすることが回避され、結果として、アームシリンダ11を円滑に伸長させることが可能となる。
アームシリンダ11を伸長させる際と同様に、アームシリンダ11を収縮させる際も、第2ポンプ32により反ロッド側室20bから排出される作動油の流量が設定値よりも大きいと、反ロッド側室20bの圧力が負圧となってキャビテーションが発生し、アームシリンダ11の作動が不安定になるおそれがある。
また、アームシリンダ11を収縮させる際に、第2ポンプ32により反ロッド側室20bから排出される作動油の流量が設定値よりも小さいと、ロッド側室20aに供給される作動油によってピストン21が反ロッド側室20bを収縮させるように移動することによって、反ロッド側室20bの圧力が異常に高まり、アームシリンダ11の収縮が妨げられるおそれがある。
このような状況を避けるために、流体圧制御システム100では、アームシリンダ11を収縮させる際にもアームシリンダ11を伸長させる際と同様の制御を行っている。
具体的には、アームシリンダ11を収縮させる際、コントローラ50では、演算部51において、作動油が排出される反ロッド側室20bの圧力を検出する第2圧力センサ62の検出値と予め設定された大気圧以上の第2目標圧力P2とを比較する。なお、第2目標圧力P2の大きさは第1目標圧力P1と同じ大きさであってもよいし、異なる大きさであってもよいが、ロッド側室20aの受圧面積の方が反ロッド側室20bの受圧面積よりも小さいため、ロッド側室20aの目標圧力である第1目標圧力P1を、反ロッド側室20bの目標圧力である第2目標圧力P2よりも高めに設定することが好ましい。
そして、第2圧力センサ62の検出値が第2目標圧力P2よりも小さい場合、反ロッド側室20bが負圧となってしまうおそれがあることから、コントローラ50は、吐出容量指令部53を介して、第1ポンプ31の容量を大きくする指令信号、すなわち、ロッド側室20aに供給される作動油の流量を増大させることによって、反ロッド側室20bを収縮する方向へのピストン21の移動を促進する指令信号をレギュレータ31aへ出力する。
反対に、第2圧力センサ62の検出値が第2目標圧力P2よりも大きい場合、反ロッド側室20bが高圧となってしまうおそれがあることから、コントローラ50は、吐出容量指令部53を介して、第1ポンプ31の容量を小さくする指令信号、すなわち、ロッド側室20aに供給される作動油の流量を減少させることによって、反ロッド側室20bを収縮する方向へのピストン21の移動を抑制する指令信号をレギュレータ31aへ出力する。
コントローラ50から指令信号を受け取ると、レギュレータ31aは、第1ポンプ31の容量が指令信号において指定された容量だけ変化するように、第1ポンプ31の斜板の傾転角度を変化させる。
このように、作動油が排出される反ロッド側室20bの圧力が、第2目標圧力P2に一致するようにコントローラ50によってフィードバック制御を行うことによって、反ロッド側室20bの圧力が負圧となってしまったり異常に上昇してしまったりすることが回避され、結果として、アームシリンダ11を円滑に収縮させることが可能となる。
ここで、アームシリンダ11によって駆動される負荷Wがアームシリンダ11に及ぼす荷重の方向が、アームシリンダ11の伸縮量が変化しても変わらない場合、例えば、アームシリンダ11の伸縮方向に沿って負荷Wが移動する場合には、上述の制御によって、アームシリンダ11を円滑に伸縮させることができる。
しかしながら、例えば、図1に示されるような油圧ショベル1では、図1に示される状態から図3に示される状態となるようにアームシリンダ11を伸長させる際、負荷Wとなるアーム7及びバケット8は、支持軸7aを中心として回動するため、アーム7及びバケット8がアームシリンダ11に及ぼす荷重の方向は、アームシリンダ11が伸長する間に切り換わる。
具体的には、図1に示される状態では、アーム7及びバケット8による荷重は、アームシリンダ11に対して、アームシリンダ11を伸長させる方向、すなわち、ロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用する。
一方で、図3に示される状態では、アーム7及びバケット8による荷重は、アームシリンダ11に対して、アームシリンダ11を収縮させる方向、すなわち、ロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用する。
このため、アームシリンダ11を伸長させる際にアーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合、コントローラ50により制御されるロッド側室20aの圧力、すなわち、第1目標圧力P1が低いと、アーム7及びバケット8による荷重によってアームシリンダ11の伸長が助長されることになる。このとき、アームシリンダ11が伸長することで拡張された反ロッド側室20bへの作動油の供給が追い付かないと、反ロッド側室20bが負圧となってキャビテーションが発生し、アームシリンダ11の作動が不安定になるおそれがある。
したがって、アームシリンダ11を伸長させる際にアーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合には、第1目標圧力P1を大きくし、反ロッド側室20bが負圧となることを抑制する必要がある。
一方で、アーム7及びバケット8がアームシリンダ11に及ぼす荷重の方向が切り換わり、アームシリンダ11を伸長させる際にアーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合、アームシリンダ11を円滑に伸長させるには、反ロッド側室20bの圧力を高める必要がある。このとき、コントローラ50により制御されるロッド側室20aの圧力、すなわち、第1目標圧力P1が高いと、アームシリンダ11を伸長させるには、反ロッド側室20bの圧力をさらに高めなければならず、第2ポンプ32の駆動トルクが増大することで、結果として、電動モータ41において無駄なエネルギーが消費されることになる。
したがって、アームシリンダ11を伸長させる際にアーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合には、第1目標圧力P1を小さく、電動モータ41において無駄なエネルギーが消費されることを抑制する必要がある。
同様に、図3に示される状態から図1に示される状態となるようにアームシリンダ11を収縮させる際、負荷Wとなるアーム7及びバケット8は、支持軸7aを中心として回動するため、アーム7及びバケット8がアームシリンダ11に及ぼす荷重の方向は、アームシリンダ11が収縮する間に切り換わる。
上述のように、図3に示される状態では、アーム7及びバケット8による荷重は、アームシリンダ11に対して、アームシリンダ11を収縮させる方向に作用し、図1に示される状態では、アーム7及びバケット8による荷重は、アームシリンダ11に対して、アームシリンダ11を伸長させる方向に作用する。
このため、アームシリンダ11を収縮させる際にアーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合、コントローラ50により制御される反ロッド側室20bの圧力、すなわち、第2目標圧力P2が低いと、アーム7及びバケット8による荷重によってアームシリンダ11の収縮が助長されることになる。このとき、アームシリンダ11が収縮することで拡張されたロッド側室20aへの作動油の供給が追い付かないと、ロッド側室20aが負圧となってキャビテーションが発生し、アームシリンダ11の作動が不安定になるおそれがある。
したがって、アームシリンダ11を収縮させる際にアーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合には、第2目標圧力P2を大きくし、ロッド側室20aが負圧となることを抑制する必要がある。
一方で、アーム7及びバケット8がアームシリンダ11に及ぼす荷重の方向が切り換わり、アームシリンダ11を収縮させる際にアーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合、アームシリンダ11を円滑に収縮させるには、ロッド側室20aの圧力を高める必要がある。このとき、コントローラ50により制御される反ロッド側室20bの圧力、すなわち、第2目標圧力P2が高いと、アームシリンダ11を収縮させるには、ロッド側室20aの圧力をさらに高めなければならず、第1ポンプ31の駆動トルクが増大することで、結果として、電動モータ41において無駄なエネルギーが消費されることになる。
したがって、アームシリンダ11を収縮させる際にアーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合には、第2目標圧力P2を小さく、電動モータ41において無駄なエネルギーが消費されることを抑制する必要がある。
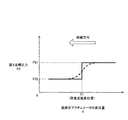
このような理由から、流体圧制御システム100では、第1目標圧力P1及び第2目標圧力P2の大きさを、図4及び図5にそれぞれ示されるように、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わる前後において変化させている。
具体的には、図4に示すように、第1目標圧力P1の大きさは、伸長方向において負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わるまでは、比較的大きな反転前第1目標圧力P11とされ、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わった後は、反転前第1目標圧力P11よりも小さい反転後第1目標圧力P12とされる。
また、図5に示すように、第2目標圧力P2の大きさは、収縮方向において、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わるまでは、比較的大きな反転前第2目標圧力P21とされ、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わった後は、反転前第2目標圧力P21よりも小さい反転後第2目標圧力P22とされる。
図4及び図5に示される負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わる荷重反転変位量X1や、アームシリンダ11の変位量Xに対する各目標圧力の大きさは、コントローラ50の記憶部52に予めマップや相関曲線として記憶されている。
次に、図4及び図5に示されるマップを用いた制御について説明する。
コントローラ50の演算部51では、アームシリンダ11を伸長させている間、ピストンロッド22のストローク量を検出する第1変位センサ63の出力値に基づいて、アームシリンダ11の変位量Xが荷重反転変位量X1以下か荷重反転変位量X1よりも大きいかが判定される。
演算部51において、アームシリンダ11の変位量Xが荷重反転変位量X1以下であると判定されると、コントローラ50は、第1目標圧力P1を反転前第1目標圧力P11とし、第1圧力センサ61の検出値が反転前第1目標圧力P11に一致するように、第1ポンプ31の容量を制御する。
これによりロッド側室20aの圧力が比較的高い反転前第1目標圧力P11となるため、アーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合であっても、反ロッド側室20bが負圧となることを抑制することができる。
一方、演算部51において、アームシリンダ11の変位量Xが荷重反転変位量X1よりも大きいと判定されると、コントローラ50は、第1目標圧力P1を反転後第1目標圧力P12とし、第1圧力センサ61の検出値が反転後第1目標圧力P12に一致するように、第1ポンプ31の容量を制御する。
これによりロッド側室20aの圧力が比較的低い反転後第1目標圧力P12となるため、アーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合であっても、第2ポンプ32の吐出圧が低減されるため、結果として、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
なお、第1目標圧力P1を反転前第1目標圧力P11から反転後第1目標圧力P12へと急激に切り換えると、アームシリンダ11の動作にショックやハンチングを発生させるおそれがある。このため、図4に破線で示すように、荷重反転変位量X1近傍において、第1目標圧力P1を反転前第1目標圧力P11から反転後第1目標圧力P12へと緩やかに変化させてもよい。
アームシリンダ11を伸長させる際と同様に、アームシリンダ11を収縮させている間、コントローラ50の演算部51では、ピストンロッド22のストローク量を検出する第1変位センサ63の出力値に基づいて、アームシリンダ11の変位量Xが荷重反転変位量X1以下か荷重反転変位量X1よりも大きいかが判定される。
演算部51において、アームシリンダ11の変位量Xが荷重反転変位量X1よりも大きいと判定されると、コントローラ50は、第2目標圧力P2を反転前第2目標圧力P21とし、第2圧力センサ62の検出値が反転前第2目標圧力P21に一致するように、第1ポンプ31の容量を制御する。
これにより反ロッド側室20bの圧力が比較的高い反転前第2目標圧力P21となるため、アーム7及びバケット8による荷重がロッド側室20aを拡張させ反ロッド側室20bを収縮させる方向に作用している場合であっても、ロッド側室20aが負圧となることを抑制することができる。
一方、演算部51において、アームシリンダ11の変位量Xが荷重反転変位量X1以下であると判定されると、コントローラ50は、第2目標圧力P2を反転後第2目標圧力P22とし、第2圧力センサ62の検出値が反転後第2目標圧力P22に一致するように、第1ポンプ31の容量を制御する。
これにより反ロッド側室20bの圧力が比較的低い反転後第2目標圧力P22となるため、アーム7及びバケット8による荷重がロッド側室20aを収縮させ反ロッド側室20bを拡張させる方向に作用している場合であっても、第1ポンプ31の吐出圧が低減されるため、結果として、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
なお、第2目標圧力P2を反転前第2目標圧力P21から反転後第2目標圧力P22へと急激に切り換えると、アームシリンダ11の動作にショックやハンチングを発生させるおそれがある。このため、図5に破線で示すように、荷重反転変位量X1近傍において、第2目標圧力P2を反転前第2目標圧力P21から反転後第2目標圧力P22へと緩やかに変化させてもよい。
ここで、重力方向に対するアームシリンダ11の傾きがほぼ変わらず、さらにアームシリンダ11によって駆動される負荷Wの重心(質量中心)にも変化がなければ、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わる荷重反転変位量X1は一定の値となる。
しかしながら、例えば、図1に示されるような油圧ショベル1では、ブームシリンダ10が伸縮しブーム6が回動すると、ブーム6に設けられたアームシリンダ11の重力方向に対する傾きは当然に変化する。また、バケットシリンダ12が伸縮しバケット8がアーム7に対して回動するとアームシリンダ11によって駆動される負荷Wであるアーム7及びバケット8の重心は当然に変化する。さらに、油圧ショベル1が傾斜地に移動すれば、重力方向に対するアームシリンダ11の傾きは当然に変化する。
つまり、荷重反転変位量X1は、アームシリンダ11の傾きを変化させるブームシリンダ10の変位量やアームシリンダ11によって駆動される負荷Wの重心を変化させるバケットシリンダ12の変位量、アームシリンダ11の傾きを変化させる油圧ショベル1の傾斜量に応じて変化することになる。
このため、流体圧制御システム100は、遷移アクチュエータとしてのブームシリンダ10の変位量を検出する遷移変位量検出器としての第2変位センサ65と、遷移アクチュエータとしてのバケットシリンダ12の変位量を検出する遷移変位量検出器としての第3変位センサ66と、アームシリンダ11が設けられる装置としての油圧ショベル1の重力方向に対する傾きを検出する傾斜検出器としての傾斜センサ67と、をさらに備える。
第2変位センサ65及び第3変位センサ66は、第1変位センサ63と同じストロークセンサであり、検出された変位量に対応する電圧信号をコントローラ50に出力する。
傾斜センサ67は、水平面に対する油圧ショベル1の傾きを検出可能な加速度センサであり、検出された傾斜量に対応する電圧信号をコントローラ50に出力する。なお、傾斜センサ67は、加速度センサに限定されず、傾斜量を検出可能なセンサであれば他の形式のセンサであってもよく、例えば、ジャイロセンサであってもよい。
また、コントローラ50の記憶部52には、第2変位センサ65、第3変位センサ66及び傾斜センサ67の検出値により荷重反転変位量X1を補正する補正マップが予め記憶される。具体的には、第2変位センサ65により検出されるブームシリンダ10の変位量が大きくなるにつれて、荷重反転変位量X1は、アームシリンダ11の変位量Xが大きい方に補正され、第3変位センサ66により検出されるバケットシリンダ12の変位量が大きくなるにつれて、荷重反転変位量X1は、アームシリンダ11の変位量Xが小さい方に補正される。また、傾斜センサ67により検出される油圧ショベル1の傾きが前傾となるほど荷重反転変位量X1は、アームシリンダ11の変位量Xが小さい方に補正され、後傾となるほど荷重反転変位量X1は、アームシリンダ11の変位量Xが大きい方に補正される。
コントローラ50の演算部51では、入力された第2変位センサ65、第3変位センサ66及び傾斜センサ67の検出値と、記憶部52に記憶された補正マップと、を用いて、荷重反転変位量X1を随時補正するとともに、補正された荷重反転変位量X1を用いて、第1目標圧力P1及び第2目標圧力P2の大きさを適宜切り換える。
このように、第1目標圧力P1が反転前第1目標圧力P11から反転後第1目標圧力P12へと切り換えられるタイミング及び第2目標圧力P2が反転前第2目標圧力P21から反転後第2目標圧力P22へと切り換えられるタイミングは、アームシリンダ11の傾きの変化やアームシリンダ11によって駆動される負荷Wの重心の変化に応じて適宜変更される。
したがって、アームシリンダ11の傾きやアームシリンダ11によって駆動される負荷Wの重心が変化した場合であっても、ロッド側室20a及び反ロッド側室20bが負圧となることが抑制され、アームシリンダ11を円滑に作動させることができるとともに、第1ポンプ31及び第2ポンプ32の吐出圧が低減され、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
以上の本実施形態によれば、以下に示す効果を奏する。
流体圧制御システム100では、アームシリンダ11が駆動される際に作動油が排出される圧力室20a,20bの圧力の大きさが大気圧以上の所定の目標圧力となるように可変容量型の第1ポンプ31の容量が制御される。このように、作動油が排出される圧力室20a,20bの圧力の大きさが負圧ではない所定の大きさとなるように第1ポンプ31の容量を制御することによって、圧力室20a,20bに供給される作動油の流量が過多または過少となることが防止される。この結果、圧力室20a,20bの圧力が異常に上昇したり、圧力室20a,20bの圧力が負圧となってキャビテーションが発生したりすることが抑制されることで、アームシリンダ11の作動を安定させることができる。
以下に、本発明の実施形態の変形例について説明する。
上記実施形態では、流体圧制御システム100により制御されるアームシリンダ11は、片ロッド型の油圧シリンダである。これに代えて、流体圧アクチュエータは、両ロッド型の油圧シリンダであってもよい。なお、両ロッド型の油圧シリンダの場合、ピストンを挟んで設けられる2つの圧力室の受圧面積が同じであるため、第1目標圧力P1と第2目標圧力P2とは同じ大きさに設定される。
また、上記実施形態では、流体圧制御システム100により制御される流体圧アクチュエータは、油圧シリンダである。これに代えて、流体圧アクチュエータは、油圧で駆動する油圧モータであってもよい。
また、上記実施形態では、第1ポンプ31のみが可変容量型のポンプである。これに代えて、第1ポンプ31と第2ポンプ32との両方を可変容量型のポンプとしてもよい。この場合も、第1ポンプ31及び第2ポンプ32の何れか一方または両方の容量を適宜変更することで、上記実施形態と同様に、アームシリンダ11の作動を安定させることができる。
また、上記実施形態では、アームシリンダ11の傾き、または、アームシリンダ11によって駆動される負荷の重心Wを変化させる遷移アクチュエータは、ブームシリンダ10やバケットシリンダ12といった油圧シリンダである。これに代えて、遷移アクチュエータは、電動シリンダのように電気的に駆動するアクチュエータであってもよい。また、遷移アクチュエータは、図1に示すブームシリンダ10やバケットシリンダ12のように、アームシリンダ11の伸縮方向と平行な平面上において伸縮するアクチュエータに限定されず、アームシリンダ11の傾き、または、アームシリンダ11によって駆動される負荷の重心Wを変化させるものであればどのようなアクチュエータであってもよく、例えば、アームシリンダ11の伸縮方向と交差する平面上において伸縮または回転するアクチュエータであってもよい。
以下、本発明の実施形態の構成、作用、及び効果をまとめて説明する。
流体圧制御システム100は、ロッド側室20a及び反ロッド側室20bを有しロッド側室20a及び反ロッド側室20bに対して作動油が給排されることで駆動するアームシリンダ11と、ロッド側室20aに対して作動油を給排可能な両方向型の第1ポンプ31と、反ロッド側室20bに対して作動油を給排可能な両方向型の第2ポンプ32と、第1ポンプ31及び第2ポンプ32を駆動する電動モータ41と、電動モータ41の駆動を制御するコントローラ50と、ロッド側室20aの圧力を検出する第1圧力センサ61と、反ロッド側室20bの圧力を検出する第2圧力センサ62と、を備え、コントローラ50は、第2ポンプ32から反ロッド側室20bに作動油を供給し第1ポンプ31によりロッド側室20aから作動油を排出することによりアームシリンダ11を駆動させる場合には、第1圧力センサ61の検出値が予め定められた大気圧以上の第1目標圧力となるように第1ポンプ31及び第2ポンプ32の少なくとも一方の容量を制御し、第1ポンプ31からロッド側室20aに作動油を供給し第2ポンプ32により反ロッド側室20bから作動油を排出することによりアームシリンダ11を駆動させる場合には、第2圧力センサ62の検出値が予め定められた大気圧以上の第2目標圧力となるように第1ポンプ31及び第2ポンプ32の少なくとも一方の容量を制御する。
この構成では、アームシリンダ11が駆動される際に作動油が排出される圧力室20a,20bの圧力の大きさが大気圧以上の所定の目標圧力となるように第1ポンプ31または第2ポンプ32の容量が制御される。このように、作動油が排出される圧力室20a,20bの圧力の大きさが負圧ではない所定の大きさとなるように第1ポンプ31または第2ポンプ32の容量を制御することによって、圧力室20a,20bに供給される作動油の流量が過多または過少となることが防止される。この結果、圧力室20a,20bの圧力が異常に上昇したり、圧力室20a,20bの圧力が負圧となってキャビテーションが発生したりすることが抑制されることで、アームシリンダ11の作動を安定させることができる。
また、第1ポンプ31及び第2ポンプ32の一方は可変容量ポンプであり、他方は固定容量ポンプである。
この構成では、第1ポンプ31及び第2ポンプ32の一方が可変容量ポンプであり、他方が固定容量ポンプである。このように、比較的構造が簡素で安価な固定容量ポンプを用いることによって、流体圧制御システム100の製造コストを低減させることができる。
また、アームシリンダ11は、ロッド側室20aと反ロッド側室20bとを有する片ロッド型のシリンダであり、第1ポンプ31はロッド側室20aに対して作動油を給排可能な可変容量ポンプであり、第2ポンプ32は反ロッド側室20bに対して作動油を給排可能な固定容量ポンプであり、第1ポンプ31の最大容量は、第2ポンプ32の容量よりも小さい。
この構成では、容積が小さいロッド側室20aに対して作動油を給排するポンプとして可変容量ポンプが用いられ、容積が大きい反ロッド側室20bに対して作動油を給排するポンプとして固定容量ポンプが用いられる。比較的構造が複雑であり高価な可変容量型ポンプの容量を小さくすることが可能となることで、流体圧制御システム100を小型化することができるとともに、流体圧制御システム100の製造コストを低減させることができる。
また、流体圧制御システム100は、アームシリンダ11の変位量を検出する第1変位センサ63をさらに備え、アームシリンダ11によって駆動される負荷Wがアームシリンダ11に及ぼす荷重の方向がアームシリンダ11の変位量に応じて切り換わる場合、コントローラ50は、第1変位センサ63の検出値に基づき、荷重の方向が切り換わるときの変位量である荷重反転変位量X1を境に第1目標圧力及び第2目標圧力を変更する。
この構成では、第1目標圧力及び第2目標圧力の大きさが、アームシリンダ11によって駆動される負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わるときの変位量である荷重反転変位量X1を境に変更される。このように、荷重反転変位量X1を境に第1目標圧力及び第2目標圧力の大きさを変えることによって、アームシリンダ11に対してどのように荷重が作用している場合であっても、圧力室20a,20bが負圧となることが抑制されることで、アームシリンダ11の作動を安定させることができるとともに、ポンプ31,32の吐出圧が低減されることで、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
また、流体圧制御システム100は、アームシリンダ11の傾き、または、アームシリンダ11によって駆動される負荷Wの重心を変化させるブームシリンダ10及びバケットシリンダ12と、ブームシリンダ10及びバケットシリンダ12の変位量を検出する第2変位センサ65及び第3変位センサ66と、をさらに備え、コントローラ50は、第2変位センサ65及び第3変位センサ66の検出値に基づいて荷重反転変位量X1を演算する。
この構成では、荷重反転変位量X1が第2変位センサ65及び第3変位センサ66の検出値に基づいて演算される。このように、アームシリンダ11の傾き、または、アームシリンダ11によって駆動される負荷Wの重心を変化させるアクチュエータの変位量に基づいて荷重反転変位量X1を演算することによって、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わるタイミングを精度よく求めることが可能となる。この結果、圧力室20a,20bが負圧となることが確実に抑制されることで、アームシリンダ11の作動を安定させることができるとともに、ポンプ31,32の吐出圧が低減されることで、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
また、流体圧制御システム100は、アームシリンダ11が設けられる油圧ショベル1の重力方向に対する傾きを検出する傾斜センサ67をさらに備え、コントローラ50は、傾斜センサ67の検出値に基づいて荷重反転変位量X1を演算する。
この構成では、荷重反転変位量X1が傾斜センサ67の検出値に基づいて演算される。このように、アームシリンダ11の傾き、または、アームシリンダ11によって駆動される負荷Wの重心に影響を及ぼす油圧ショベル1の傾きに基づいて荷重反転変位量X1を演算することによって、負荷Wがアームシリンダ11に及ぼす荷重の方向が切り換わるタイミングを精度よく求めることが可能となる。この結果、圧力室20a,20bが負圧となることが確実に抑制されることで、アームシリンダ11の作動を安定させることができるとともに、ポンプ31,32の吐出圧が低減されることで、電動モータ41において無駄なエネルギーが消費されることを抑制することができる。
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一部を示したに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
例えば、上記実施形態では、流体圧制御システム100がアームシリンダ11の作動を制御する場合について説明したが、流体圧制御システム100により制御される流体圧アクチュエータは、アームシリンダ11に限定されず、ブームシリンダ10やバケットシリンダ12であってもよい。
また、上記実施形態では、作動流体として作動油が用いられるが、作動水等の他の流体を作動流体として用いてもよい。
また、上記実施形態では、流体圧制御システム100が適用される装置が油圧ショベル1である場合について説明したが、流体圧制御システム100は、可動部材等の負荷を駆動する流体圧アクチュエータを有する作業機であれば、移動式、定置式を問わず、どのような作業機にも適用可能であり、例えば、ホイールローダ、掘削機等の建設機械や、クレーンや昇降荷台といった流体圧アクチュエータにより駆動される装置を備えた車両、プレス機等の加工機械であってもよい。
100・・・流体圧制御システム、1・・・油圧ショベル(装置)、6・・・ブーム、7・・・アーム(負荷)、8・・・バケット(負荷)、10・・・ブームシリンダ(遷移アクチュエータ)、11・・・アームシリンダ(流体圧アクチュエータ)、12・・・バケットシリンダ(遷移アクチュエータ)、20a・・・ロッド側室(第1圧力室)、20b・・・反ロッド側室(第2圧力室)、31・・・第1ポンプ、32・・・第2ポンプ、41・・・電動モータ(駆動源)、50・・・コントローラ、61・・・第1圧力センサ(第1圧力検出器)、62・・・第2圧力センサ(第1圧力検出器)、63・・・第1変位センサ(変位量検出器)、65・・・第2変位センサ(遷移変位量検出器)、66・・・第3変位センサ(遷移変位量検出器)、67・・・傾斜センサ(傾斜検出器)
Claims (6)
- 流体圧制御システムであって、
第1圧力室及び第2圧力室を有し前記第1圧力室及び前記第2圧力室に対して作動流体が給排されることで駆動する流体圧アクチュエータと、
前記第1圧力室に対して作動流体を給排可能な両方向型の第1ポンプと、
前記第2圧力室に対して作動流体を給排可能な両方向型の第2ポンプと、
前記第1ポンプ及び前記第2ポンプを駆動する駆動源と、
前記駆動源の駆動を制御するコントローラと、
前記第1圧力室の圧力を検出する第1圧力検出器と、
前記第2圧力室の圧力を検出する第2圧力検出器と、を備え、
前記コントローラは、
前記第2ポンプから前記第2圧力室に作動流体を供給し前記第1ポンプにより前記第1圧力室から作動流体を排出することにより前記流体圧アクチュエータを駆動させる場合には、前記第1圧力検出器の検出値が予め定められた大気圧以上の第1目標圧力となるように前記第1ポンプ及び前記第2ポンプの少なくとも一方の容量を制御し、
前記第1ポンプから前記第1圧力室に作動流体を供給し前記第2ポンプにより前記第2圧力室から作動流体を排出することにより前記流体圧アクチュエータを駆動させる場合には、前記第2圧力検出器の検出値が予め定められた大気圧以上の第2目標圧力となるように前記第1ポンプ及び前記第2ポンプの少なくとも一方の容量を制御することを特徴とする流体圧制御システム。 - 前記第1ポンプ及び前記第2ポンプの一方は可変容量ポンプであり、他方は固定容量ポンプであることを特徴とする請求項1に記載の流体圧制御システム。
- 前記流体圧アクチュエータは、ロッド側室と反ロッド側室とを有する片ロッド型のシリンダであり、
前記第1ポンプは前記ロッド側室に対して作動流体を給排可能な可変容量ポンプであり、
前記第2ポンプは前記反ロッド側室に対して作動流体を給排可能な固定容量ポンプであり、
前記第1ポンプの最大容量は、前記第2ポンプの容量よりも小さいことを特徴とする請求項1または2に記載の流体圧制御システム。 - 前記流体圧アクチュエータの変位量を検出する変位量検出器をさらに備え、
前記流体圧アクチュエータによって駆動される負荷が前記流体圧アクチュエータに及ぼす荷重の方向が前記流体圧アクチュエータの前記変位量に応じて切り換わる場合、前記コントローラは、前記変位量検出器の検出値に基づき、前記荷重の方向が切り換わるときの変位量である荷重反転変位量を境に前記第1目標圧力及び前記第2目標圧力を変更することを特徴とする請求項1から3の何れか1つに記載の流体圧制御システム。 - 前記流体圧アクチュエータの傾き、または、前記流体圧アクチュエータによって駆動される前記負荷の重心を変化させる遷移アクチュエータと、
前記遷移アクチュエータの変位量を検出する遷移変位量検出器と、をさらに備え、
前記コントローラは、前記遷移変位量検出器の検出値に基づいて前記荷重反転変位量を演算することを特徴とする請求項4に記載の流体圧制御システム。 - 前記流体圧アクチュエータが設けられる装置の重力方向に対する傾きを検出する傾斜検出器をさらに備え、
前記コントローラは、前記傾斜検出器の検出値に基づいて前記荷重反転変位量を演算することを特徴とする請求項4または5に記載の流体圧制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018126527A JP2020008029A (ja) | 2018-07-03 | 2018-07-03 | 流体圧制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018126527A JP2020008029A (ja) | 2018-07-03 | 2018-07-03 | 流体圧制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020008029A true JP2020008029A (ja) | 2020-01-16 |
Family
ID=69151180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018126527A Pending JP2020008029A (ja) | 2018-07-03 | 2018-07-03 | 流体圧制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020008029A (ja) |
-
2018
- 2018-07-03 JP JP2018126527A patent/JP2020008029A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108603360B (zh) | 挖土机 | |
| WO2016111205A1 (ja) | 建設機械 | |
| KR20130124163A (ko) | 건설기계용 선회유량 제어시스템 및 그 제어방법 | |
| WO2020003811A1 (ja) | 建設機械 | |
| JP5797061B2 (ja) | 油圧ショベル | |
| KR20160015164A (ko) | 건설 기계의 선회 구동 장치 | |
| JP7085996B2 (ja) | 作業機械および作業機械の制御方法 | |
| KR20190026907A (ko) | 건설 기계 | |
| WO2017061220A1 (ja) | 建設機械 | |
| JP2014177969A (ja) | 建設機械の油圧回路及びその制御方法 | |
| CN111771033B (zh) | 作业车辆 | |
| JP4884124B2 (ja) | 建設機械の油圧制御回路 | |
| CN111587306B (zh) | 回转式液压工程机械 | |
| JP6605316B2 (ja) | 作業機械の駆動装置 | |
| JP6190297B2 (ja) | 操作装置 | |
| JP2020008029A (ja) | 流体圧制御システム | |
| CN112424429A (zh) | 装卸作业车辆 | |
| JP4381781B2 (ja) | 建設機械のポンプ制御装置 | |
| JPWO2017138070A1 (ja) | 作業車両および動作制御方法 | |
| JP5568509B2 (ja) | 油圧制御装置および作業機械 | |
| EP3660223A1 (en) | Construction machinery | |
| JP6619939B2 (ja) | 液圧駆動システム | |
| JP3634601B2 (ja) | 旋回式建設機械の油圧ポンプ制御装置 | |
| JP6101974B2 (ja) | 建設機械 | |
| JP7223264B2 (ja) | 建設機械 |