JP2019106940A - 自動走行草刈機 - Google Patents
自動走行草刈機 Download PDFInfo
- Publication number
- JP2019106940A JP2019106940A JP2017242686A JP2017242686A JP2019106940A JP 2019106940 A JP2019106940 A JP 2019106940A JP 2017242686 A JP2017242686 A JP 2017242686A JP 2017242686 A JP2017242686 A JP 2017242686A JP 2019106940 A JP2019106940 A JP 2019106940A
- Authority
- JP
- Japan
- Prior art keywords
- traveling
- target line
- mowing
- automatic
- cut grass
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 71
- 244000025254 Cannabis sativa Species 0.000 claims abstract description 54
- 238000007599 discharging Methods 0.000 claims abstract description 10
- 241001494496 Leersia Species 0.000 claims description 48
- 238000005520 cutting process Methods 0.000 claims description 44
- 238000003306 harvesting Methods 0.000 claims description 7
- 230000005540 biological transmission Effects 0.000 description 5
- 235000013399 edible fruits Nutrition 0.000 description 3
- 239000000446 fuel Substances 0.000 description 2
- 240000008042 Zea mays Species 0.000 description 1
- 235000005824 Zea mays ssp. parviglumis Nutrition 0.000 description 1
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 235000005822 corn Nutrition 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002420 orchard Substances 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images








Landscapes
- Guiding Agricultural Machines (AREA)
- Harvester Elements (AREA)
Abstract
Description
草刈走行を行う走行機体と、
刈取後の刈草を排出口から刈取後の地面に排出する排出機構と、
前記排出機構によって排出された前記刈草を検出する検出装置と、
前記刈草の検出に基づいて目標ラインを算出する目標ライン算出部と、
前記目標ライン算出部に基づく目標ラインと前記走行機体との距離が、予め設定された距離に保持されるように前記走行機体を自動走行させる自動走行制御装置と、
が備えられていることを特徴とする。
前記排出機構は、前記走行機体の走行軌跡に沿って前記刈草を塊状に排出し、塊状の前記刈草が、前記走行機体の走行軌跡に沿って連続的又は断続的な凸部を形成するように構成されていると好適である。
前記排出機構は、前記走行機体のうち、前記刈取後の地面の位置する側の側部に設けられていると好適である。
前記検出装置は、前記走行機体のうち、前記刈取後の地面の位置する側の側部に設けられていると好適である。
前記排出機構に、前記走行機体から前記排出口に亘る排出経路が形成され、
前記排出経路は、前記排出口の位置する側ほど、断面形状が狭く絞られていると好適である。
前記排出機構に、前記排出口を開閉可能な開閉機構と、前記刈草の圧力を検知する圧力検出手段と、が備えられ、
前記圧力検出手段が予め設定された圧力以上の圧力を検知したときに、前記開閉機構が開くと好適である。
本発明による自動走行作業機について、その実施形態を図面に基づいて説明する。
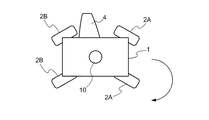
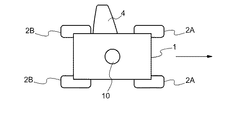
図1に示されているように、本実施形態に例示される自動走行作業機としての自動走行草刈機に、走行機体1と、第一車輪2Aと、第二車輪2Bと、草刈装置3と、が備えられている。第一車輪2Aは、走行機体1における長手方向の一端側に左右一対で設けられている。第二車輪2Bは、走行機体1における長手方向の他端側に左右一対で設けられている。草刈装置3は、走行機体1の下部における第一車輪2Aと第二車輪2Bとの間に設けられている。また、走行機体1の一端側部に排出機構4(図4及び図5参照)が備えられ、排出機構4は、草刈装置3によって刈り取られた刈草を排出する。更に、走行機体1の上部に検出装置10が設けられている。検出装置10については後述する。
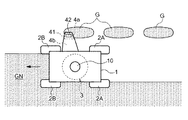
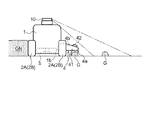
図4及び図5に示されているように、排出機構4は、走行機体1の左右何れかの側部に突出する状態で設けられている。なお、図4及び図5において、点描化された領域GNは、草刈対象領域のうち、未刈領域を示している。後述する図7乃至図13において示された領域GNも同様である。本実施形態では、排出機構4は、走行機体1のうち、刈取後の地面の位置する側に設けられている。排出機構4の突出先端部は開口して排出口4aが形成されている。また、排出機構4に、走行機体1の排出口1bと、排出機構4の排出口4aと、に亘って排出経路4bが形成されている。排出経路4bは、排出口4aの位置する側に位置するほど、断面形状が狭く絞られる先絞り形状に形成されている。この形状によって、草刈装置3で切断された刈草が、排出口1bから排出経路4bに入り込み、排出口4aの位置する側の箇所で圧縮されて塊状刈草Gとなる。
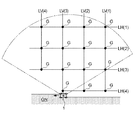
図6に示されているように、予め設定された走行経路に沿って自動走行草刈機の自動走行を可能にするための制御ユニットUが、例えばマイクロコンピュータに組み込まれた状態で、自動走行草刈機に備えられている。制御ユニットUに、走行モード判定部11と、目標ライン算出部12と、自動走行制御装置13と、デコード部14と、が備えられている。目標ライン算出部12は、走行機体1が自動走行を行うための目標ラインLを設定する。自動走行制御装置13は、目標ライン算出部12が設定する目標ラインLと平行に走行機体1が走行するように構成されている。デコード部14は、検出装置10によって検出される検出信号を、目標ライン算出部12が目標ラインLを算出するためのデータに変換する。また、制御ユニットUは、走行モード判定部11の判定によって、自動走行モードと手動走行モードとに切替可能なように構成されている。手動走行モードでは、送信機7の人為操作に基づいて自動走行作業機が草刈走行等を行うため、自動走行制御装置13は無効化されるが、自動走行制御装置13と連動して目標ライン算出部12も無効化される構成であっても良い。
本発明は、上記の実施形態に例示された構成に限定されるものではなく、以下、本発明の代表的な別実施形態を例示する。
3 :草刈装置
4 :排出機構
4a :排出口
4b :排出経路
10 :検出装置
12 :目標ライン算出部
13 :自動走行制御装置
41 :開閉機構
42 :圧力センサ(圧力検出手段)
G :塊状刈草
L :目標ライン
Claims (6)
- 草刈走行を行う走行機体と、
刈取後の刈草を排出口から刈取後の地面に排出する排出機構と、
前記排出機構によって排出された前記刈草を検出する検出装置と、
前記刈草の検出に基づいて目標ラインを算出する目標ライン算出部と、
前記目標ライン算出部に基づく目標ラインと前記走行機体との距離が、予め設定された距離に保持されるように前記走行機体を自動走行させる自動走行制御装置と、
が備えられている自動走行草刈機。 - 前記排出機構は、前記走行機体の走行軌跡に沿って前記刈草を塊状に排出し、塊状の前記刈草が、前記走行機体の走行軌跡に沿って連続的又は断続的な凸部を形成するように構成されている請求項1に記載の自動走行草刈機。
- 前記排出機構は、前記走行機体のうち、前記刈取後の地面の位置する側の側部に設けられている請求項1又は2に記載の自動走行草刈機。
- 前記検出装置は、前記走行機体のうち、前記刈取後の地面の位置する側の側部に設けられている請求項1から3の何れか一項に記載の自動走行草刈機。
- 前記排出機構に、前記走行機体から前記排出口に亘る排出経路が形成され、
前記排出経路は、前記排出口の位置する側ほど、断面形状が狭く絞られている請求項1から4の何れか一項に記載の自動走行草刈機。 - 前記排出機構に、前記排出口を開閉可能な開閉機構と、前記刈草の圧力を検知する圧力検出手段と、が備えられ、
前記圧力検出手段が予め設定された圧力以上の圧力を検知したときに、前記開閉機構が開く請求項1から5の何れか一項に記載の自動走行草刈機。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017242686A JP6817183B2 (ja) | 2017-12-19 | 2017-12-19 | 自動走行草刈機 |
| US16/771,264 US11696525B2 (en) | 2017-12-19 | 2018-12-19 | Automatic travel work machine, automatic travel grass mower, grass mower, and grass mower automatic travel system |
| CN201880080844.8A CN111447827B (zh) | 2017-12-19 | 2018-12-19 | 自动行进作业机、自动行进割草机、割草机和割草机自动行进系统 |
| EP18893078.8A EP3729937B1 (en) | 2017-12-19 | 2018-12-19 | Autonomous travel work machine |
| KR1020207016331A KR102457518B1 (ko) | 2017-12-19 | 2018-12-19 | 자동 주행 작업기, 자동 주행 예초기, 예초기 및 예초기 자동 주행 시스템 |
| PCT/JP2018/046872 WO2019124463A1 (ja) | 2017-12-19 | 2018-12-19 | 自動走行作業機、自動走行草刈機、草刈機及び草刈機自動走行システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017242686A JP6817183B2 (ja) | 2017-12-19 | 2017-12-19 | 自動走行草刈機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019106940A true JP2019106940A (ja) | 2019-07-04 |
| JP6817183B2 JP6817183B2 (ja) | 2021-01-20 |
Family
ID=67178021
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017242686A Active JP6817183B2 (ja) | 2017-12-19 | 2017-12-19 | 自動走行草刈機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6817183B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111707256A (zh) * | 2020-05-13 | 2020-09-25 | 苏州天炯信息科技有限公司 | 一种助航灯快速布置特种车辆的综合定位导航设备 |
| JP2022011850A (ja) * | 2020-06-30 | 2022-01-17 | 株式会社クボタ | 農作業機 |
| JP2022055400A (ja) * | 2020-09-29 | 2022-04-08 | 株式会社ササキコーポレーション | 草刈作業機 |
| WO2022107588A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、データ生成ユニット、移動体の動作を制御する方法、およびデータを生成する方法 |
| WO2022107586A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、および移動体の動作を制御する方法 |
| WO2022107587A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、データ生成ユニット、およびデータを生成する方法 |
| WO2024135725A1 (ja) * | 2022-12-22 | 2024-06-27 | 株式会社クボタ | 作業車両 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5151367U (ja) * | 1974-10-17 | 1976-04-19 | ||
| JPS623002Y2 (ja) * | 1981-09-18 | 1987-01-23 | ||
| JPS6280532U (ja) * | 1985-11-07 | 1987-05-22 | ||
| JP2000060261A (ja) * | 1998-08-17 | 2000-02-29 | Kubota Corp | モーア |
| US20130192183A1 (en) * | 2011-08-03 | 2013-08-01 | Lg Electronics Inc. | Lawn mower robot system and method of controlling the same |
| JP2016114984A (ja) * | 2014-12-11 | 2016-06-23 | 福田 敏男 | 作業車両 |
| JP2016189172A (ja) * | 2015-03-30 | 2016-11-04 | 株式会社クボタ | 自動走行情報管理システム |
-
2017
- 2017-12-19 JP JP2017242686A patent/JP6817183B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5151367U (ja) * | 1974-10-17 | 1976-04-19 | ||
| JPS623002Y2 (ja) * | 1981-09-18 | 1987-01-23 | ||
| JPS6280532U (ja) * | 1985-11-07 | 1987-05-22 | ||
| JP2000060261A (ja) * | 1998-08-17 | 2000-02-29 | Kubota Corp | モーア |
| US20130192183A1 (en) * | 2011-08-03 | 2013-08-01 | Lg Electronics Inc. | Lawn mower robot system and method of controlling the same |
| JP2016114984A (ja) * | 2014-12-11 | 2016-06-23 | 福田 敏男 | 作業車両 |
| JP2016189172A (ja) * | 2015-03-30 | 2016-11-04 | 株式会社クボタ | 自動走行情報管理システム |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111707256A (zh) * | 2020-05-13 | 2020-09-25 | 苏州天炯信息科技有限公司 | 一种助航灯快速布置特种车辆的综合定位导航设备 |
| JP2022011850A (ja) * | 2020-06-30 | 2022-01-17 | 株式会社クボタ | 農作業機 |
| JP7458918B2 (ja) | 2020-06-30 | 2024-04-01 | 株式会社クボタ | 農作業機 |
| JP2022055400A (ja) * | 2020-09-29 | 2022-04-08 | 株式会社ササキコーポレーション | 草刈作業機 |
| JP7376929B2 (ja) | 2020-09-29 | 2023-11-09 | 株式会社ササキコーポレーション | 草刈作業機 |
| WO2022107588A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、データ生成ユニット、移動体の動作を制御する方法、およびデータを生成する方法 |
| WO2022107586A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、および移動体の動作を制御する方法 |
| WO2022107587A1 (ja) * | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、データ生成ユニット、およびデータを生成する方法 |
| WO2024135725A1 (ja) * | 2022-12-22 | 2024-06-27 | 株式会社クボタ | 作業車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6817183B2 (ja) | 2021-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019106940A (ja) | 自動走行草刈機 | |
| CN111447827B (zh) | 自动行进作业机、自动行进割草机、割草机和割草机自动行进系统 | |
| EP4011185A1 (en) | Automatic travel system for work vehicle | |
| CN113287075A (zh) | 作业车辆用的障碍物监测系统 | |
| CN111823213B (zh) | 一种农业机器人及其行走控制方法 | |
| JP7139492B2 (ja) | 圃場作業機 | |
| JP2017127290A (ja) | 農業用作業車両 | |
| EP3409097A1 (en) | Agricultural working machine | |
| JP2022173259A5 (ja) | ||
| JP6458258B1 (ja) | 走行位置認知システム、農作業用走行車、及び無人自動走行作業車 | |
| JP6626668B2 (ja) | 農作業機用案内システム | |
| CN110865646A (zh) | 智能避障机器人和避让障碍物的方法 | |
| US20220211025A1 (en) | System and method for performing spraying operations with an agricultural sprayer | |
| JP2011130729A (ja) | 移動作業機の操縦制御装置 | |
| JP2021016373A (ja) | 走行車の自動回転システムと方法、及びそれを搭載した農作業用走行車、並びに無人自動走行作業車 | |
| JP6916544B2 (ja) | 農作業機用案内システム | |
| CN213005289U (zh) | 农业机器人 | |
| JP6309413B2 (ja) | 自動走行車両 | |
| CN113194708A (zh) | 自主行驶系统 | |
| JP6309412B2 (ja) | 自動走行車両 | |
| US20240324483A1 (en) | Control Method Of Work Vehicle, Work Vehicle Control Program, Work Vehicle Control System, And Work System | |
| TW201410300A (zh) | 遙控式電動高爾夫球袋車 | |
| EP4442542A1 (en) | Control method of work vehicle, work vehicle control program, work vehicle control system, and work system | |
| JP7317165B2 (ja) | 作業車両用の障害物検知システム | |
| KR20240147481A (ko) | 작업 차량의 제어 방법, 작업 차량용 제어 프로그램, 작업 차량용 제어 시스템 및 작업 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6817183 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |