以下、本発明に係る実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
以下の説明においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部の位置関係について説明する。所定面内においてX軸と平行な方向をX軸方向とし、所定面内においてX軸と直交するY軸と平行な方向をY軸方向とし、X軸及びY軸のそれぞれと直交するZ軸と平行な方向をZ軸方向とする。X軸を中心とする回転方向又は傾斜方向をθX方向とし、Y軸を中心とする回転方向又は傾斜方向をθY方向とし、Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。所定面は、XY平面である。Z軸は、所定面と直交する。本実施形態において、所定面は、水平面と平行であることとする。Z軸方向は、鉛直方向である。なお、所定面が水平面に対して傾斜していてもよい。
[電子部品実装装置]
図1は、本実施形態に係る電子部品実装装置100の一例を示す斜視図である。電子部品実装装置100は、電子部品Cを基板Pに実装する。図1に示すように、電子部品実装装置100は、ベースフレーム101と、電子部品Cを供給するフィーダ200が設置されるフィーダバンク102と、基板Pを搬送する基板搬送装置103と、基板搬送装置103の搬送経路に設けられ、基板Pを保持する基板クランプ機構104と、電子部品Cを保持可能なノズル10を支持する実装ヘッド106と、XY平面内において実装ヘッド106を移動可能な実装ヘッド移動装置107と、実装ヘッド106に設けられ、実装ヘッド106に対してノズル10をZ軸方向及びθZ方向に移動可能なノズル移動装置112と、ノズル10に保持された電子部品Cを照明する照明装置20と、ノズル10に保持された電子部品Cを撮像する撮像装置30と、コンピュータシステム40と、を備える。
ベースフレーム101は、フィーダバンク102、基板搬送装置103、実装ヘッド106、実装ヘッド移動装置107、及び撮像装置30を支持する。
フィーダバンク102は、フィーダ200を支持する。フィーダ200は、電子部品Cを供給する電子部品供給装置である。フィーダ200は、部品供給位置PJaに電子部品Cを供給する。部品供給位置PJaは、フィーダ200からノズル10に電子部品Cを供給する部品供給処理が実施される位置である。部品供給位置PJaは、フィーダ200から供給される電子部品Cと対向する位置を含む。
基板搬送装置103は、ベースプレート105と、ベースプレート105の上方で基板Pを搬送可能な搬送ベルトとを有する。基板Pは、基板搬送装置103の搬送ベルトにより、X軸方向に搬送される。基板クランプ機構104は、基板搬送装置103の搬送経路において基板Pを保持する。基板クランプ機構104は、Y軸方向の基板Pの両端部をクランプする。
基板クランプ機構104は、実装処理が実施される実装位置PJbで基板Pを保持する。基板クランプ機構104は、基板Pの表面とXY平面とが平行となるように、基板Pを保持する。実装位置PJbは、電子部品Cを基板Pに実装する実装処理が実施される位置である。実装位置PJbは、電子部品Cが実装される基板Pと対向する位置を含む。
実装ヘッド106は、電子部品Cを保持するノズル10を有し、ノズル10に保持された電子部品Cを基板クランプ機構104に保持された基板Pに実装する。実装ヘッド106は、フィーダ200から供給された電子部品Cをノズル10で保持して基板Pの表面に実装する。実装ヘッド106は、部品供給処理が実施される部品供給位置PJa、及び実装処理が実施される実装位置PJbを含むXY平面内において移動可能である。
実装ヘッド移動装置107は、基板Pの上方及びフィーダ200の上方で、実装ヘッド106を移動する。実装ヘッド移動装置107は、フィーダ200から供給される電子部品Cと対向する部品供給位置PJa、及び電子部品Cが実装される基板Pと対向する実装位置PJbを含むXY平面内において実装ヘッド106を移動可能である。実装ヘッド移動装置107による実装ヘッド106の可動範囲は、実装ヘッド106の作業エリアを含む。実装ヘッド移動装置107の作動により、実装ヘッド106はXY平面を移動可能である。
実装ヘッド移動装置107は、実装ヘッド106をX軸方向にガイドするX軸ガイドレール108と、X軸ガイドレール108をY軸方向にガイドするY軸ガイドレール109と、実装ヘッド106をX軸方向に移動するための動力を発生するX駆動装置110と、実装ヘッド106をY軸方向に移動するための動力を発生するY駆動装置111とを有する。
実装ヘッド106は、X軸ガイドレール108に支持される。X駆動装置110は、モータのようなアクチュエータを含み、X軸ガイドレール108に支持されている実装ヘッド106をX軸方向に移動するための動力を発生する。X駆動装置110の作動により、実装ヘッド106は、X軸ガイドレール108にガイドされながらX軸方向に移動する。
X軸ガイドレール108は、Y軸ガイドレール109に支持される。Y駆動装置111は、モータのようなアクチュエータを含み、Y軸ガイドレール109に支持されているX軸ガイドレール108をY軸方向に移動するための動力を発生する。Y駆動装置111の作動により、X軸ガイドレール108は、Y軸ガイドレール109にガイドされながらY軸方向に移動する。X軸ガイドレール108がY軸方向に移動すると、そのX軸ガイドレール108に支持されている実装ヘッド106は、X軸ガイドレール108と一緒にY軸方向に移動する。本実施形態において、Y駆動装置111は、X軸ガイドレール108を介して、実装ヘッド106をY軸方向に移動する。
[実装ヘッド]
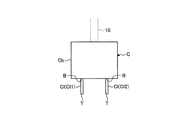
図2は、本実施形態に係る実装ヘッド106の一例を模式的に示す図である。実装ヘッド106は、電子部品Cを着脱可能に保持するノズル10を有する。ノズル10は、電子部品Cを吸着保持する吸着ノズルである。真空源と接続される吸引口がノズル10の先端部に設けられる。ノズル10の先端部と電子部品Cとが接触した状態で真空源による吸引が実施されることにより、電子部品Cはノズル10に吸着保持される。真空源による吸引が解除されることにより、電子部品Cはノズル10から解放される。なお、ノズル10は、電子部品Cを挟んで保持する把持ノズルでもよい。
実装ヘッド106は、部品供給位置PJa及び実装位置PJbのそれぞれにノズル10が配置されるように、XY平面内において移動可能である。実装ヘッド106は、フィーダ200から供給された電子部品Cをノズル10で保持して基板Pに実装する。
ノズル10は、部品供給位置PJaにおいて、フィーダ200から供給された電子部品Cを保持する。ノズル10は、部品供給位置PJaにおいて電子部品Cを保持した後、実装位置PJbまで搬送し、基板Pに実装する。実装位置PJbにおいて電子部品Cが基板Pに実装された後、ノズル10は、電子部品Cを解放する。これにより、基板Pに電子部品Cが実装される。
実装ヘッド106は、ノズル10をZ軸方向及びθZ方向に移動可能に支持する。実装ヘッド106は、ノズル10をZ軸方向及びθZ方向に移動可能なノズル移動装置112を有する。ノズル移動装置112は、ノズル10をZ軸方向に移動するZ駆動装置113と、ノズル10をθZ方向に移動(回転)するθZ駆動装置114とを含む。Z駆動装置113は、モータのようなアクチュエータを含み、ノズル10をZ軸方向に移動するための動力を発生する。θZ駆動装置114は、モータのようなアクチュエータを含み、ノズル10をθZ方向に移動するための動力を発生する。
ノズル10は、実装ヘッド移動装置107及び実装ヘッド106に設けられたノズル移動装置112により、X軸、Y軸、Z軸、及びθZの4つの方向に移動可能である。なお、ノズル10は、X軸、Y軸、Z軸、θX、θY、及びθZの6つの方向に移動可能でもよい。
[電子部品]
図3は、本実施形態に係る電子部品Cの一例を模式的に示す側面図である。図4は、本実施形態に係る電子部品Cの一例を模式的に示す平面図であって電子部品Cを下方から見た図である。
電子部品Cは、挿入型電子部品である。図3及び図4に示すように、電子部品Cは、ボディCbと、ボディCbから突出する突起であるリードClとを有する。
ボディCbは、合成樹脂製のハウジング部材を含む。ボディCbの内部空間には、例えばコイルが配置される。リードClは、金属製の突起物である。リードClは、例えばボディCbの内部空間に配置されているコイルと接続される。リードClは、ボディCbの下面から下方に突出する。
本実施形態において、リードClは、第1突起である第1リードCl1と、第2突起である第2リードCl2とを含む。すなわち、リードClは、ボディCbに2つ設けられる。
ノズル10は、ボディCbを保持する。電子部品実装装置100は、ノズル10でボディCbを保持した状態で、電子部品CのリードClを基板Pの表面に設けられた開口に挿入する。電子部品Cは、リードClが基板Pの開口に挿入されることによって、基板Pに実装される。
[撮像装置]
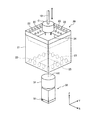
図5は、本実施形態に係る撮像装置30の一例を模式的に示す斜視図である。撮像装置30は、ノズル10に保持され、照明装置20で照明された電子部品Cを撮像する。撮像装置30は、ベースフレーム101に支持される。撮像装置30は、ノズル10に保持されている電子部品Cを下方から撮像する。
撮像装置30は、光学系31と、光学系31を通過した光を受光するイメージセンサ32とを有する。光学系31の焦点の位置は固定されている。すなわち、光学系31は、固定焦点レンズであり、撮像装置30は、固定焦点カメラである。光学系31の光軸AXは、Z軸と平行である。
イメージセンサ32は、CCD(Couple Charged Device)イメージセンサ又はCMOS(Complementary Metal Oxide Semiconductor)イメージセンサを含む。撮像装置30は、電子部品Cを撮像して、電子部品Cの画像データを取得する。
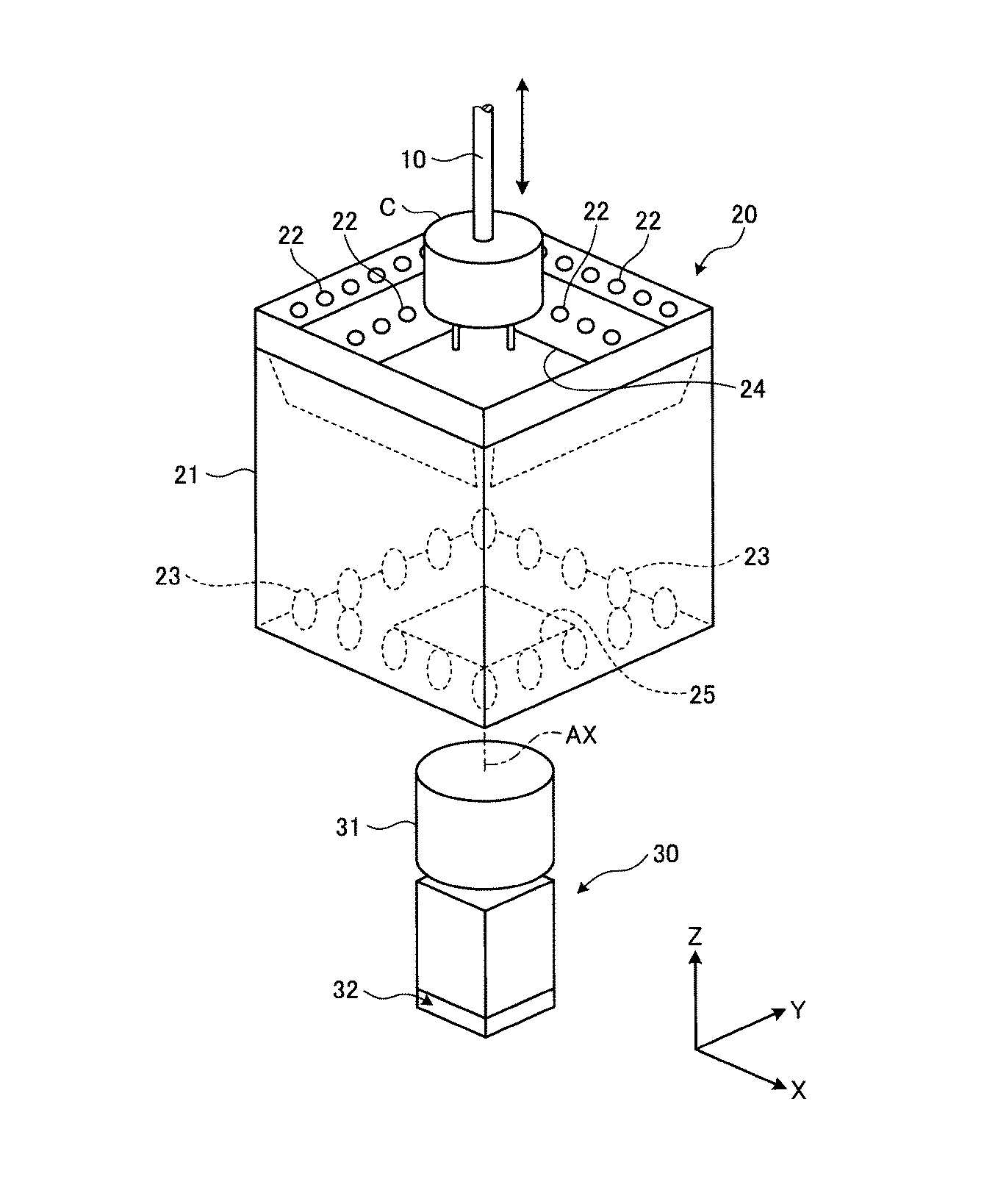
照明装置20は、ノズル10に保持されている電子部品Cを照明光で照明する。照明装置20は、撮像装置30よりも上方に配置される。照明装置20は、ケース21と、ケース21の上部に設けられる発光素子22と、ケース21の下部に設けられる発光素子23とを有する。
XY平面内において、ケース21の外形は、正方形状である。ケース21の上部に開口24が設けられる。ケース21の下部に開口25が設けられる。発光素子22は、ケース21の上部において、開口24を囲むように複数配置される。発光素子23は、ケース21の下部において、開口25を囲むように複数配置される。
ノズル10は、電子部品Cと撮像装置30の光学系31とが対向するように、電子部品Cを保持可能である。Z駆動装置113は、ノズル10に保持された電子部品Cと撮像装置30の光学系31とが対向した状態で、ノズル10をZ軸方向に移動可能である。
Z駆動装置113は、電子部品Cを保持したノズル10をZ軸方向に移動して、光学系31の光軸AXと平行なZ軸方向における電子部品Cと撮像装置30との距離Hを調整する。Z駆動装置113は、電子部品Cと撮像装置30との距離Hを調整する駆動装置として機能する。Z駆動装置113によって調整される電子部品Cと撮像装置30との距離Hは、光学系31の光軸AXと平行なZ軸方向の距離である。
Z軸方向における電子部品Cと撮像装置30との距離Hは、電子部品Cの着目部位と撮像装置30との距離を含む。電子部品Cと撮像装置30との距離Hは、電子部品Cの着目部位と撮像装置30の光学系31の複数のレンズのうち光学系31の焦点FPに最も近いレンズの表面との距離でもよいし、電子部品Cの着目部位と撮像装置30のイメージセンサ32の入射面との距離でもよいし、電子部品Cの着目部位と撮像装置30の光学系31の焦点FPとの距離でもよい。
上述のように、光学系31は、固定焦点レンズである。本実施形態において、Z軸方向における電子部品Cと撮像装置30との距離Hは、電子部品Cの着目部位と撮像装置30の光学系31の焦点FPとの距離であることとする。
撮像装置30で電子部品Cを撮像するとき、コンピュータシステム40は、Z駆動装置113を制御して、ノズル10に保持されている電子部品Cを、開口24を介してケース21の内部空間に移動する。コンピュータシステム40は、照明装置20を制御して、発光素子22及び発光素子23のそれぞれから照明光を射出させる。これにより、ケース21の内部空間に配置されている電子部品Cが照明光で照明される。撮像装置30は、ノズル10に保持され、照明装置20で照明された電子部品Cを、開口25を介して下方から撮像する。
[コンピュータシステム]
図6は、本実施形態に係るコンピュータシステム40の一例を示す機能ブロック図である。コンピュータシステム40は、例えばパーソナルコンピュータを含む。コンピュータシステム40は、CPU(Central Processing Unit)のようなプロセッサを含む演算処理装置41と、RAM(Random Access Memory)のような揮発性メモリ及びROM(Read Only Memory)のような不揮発性メモリを含む記憶装置42と、入出力インターフェース43とを有する。
照明装置20、撮像装置30、X駆動装置110、Y駆動装置111、Z駆動装置113、及びθZ駆動装置114のそれぞれは、コンピュータシステム40の入出力インターフェース43と接続される。なお、撮像装置30とコンピュータシステム40とは、LANケーブルで接続される。照明装置20、撮像装置30、X駆動装置110、Y駆動装置111、Z駆動装置113、及びθZ駆動装置114のそれぞれは、コンピュータシステム40に制御される。
演算処理装置41は、電子部品実装装置100を制御する制御部4と、撮像装置30で取得された電子部品Cの画像データを画像処理する画像処理部5と、を含む。
制御部4は、実装処理を実施するための制御信号を出力する実装制御部411と、照明装置20を制御する制御信号を出力する照明制御部412と、撮像装置30を制御する制御信号を出力する撮像制御部413と、撮像装置30で電子部品Cを撮像するときの電子部品Cと撮像装置30との距離を設定する距離設定部414と、XY平面内におけるボディCbとリードClの先端部Tとの相対位置に基づいて電子部品Cを基板Pに実装するか否かを判定する判定部415と、リードClを基板Pの開口に挿入するときのノズル10の移動経路を決定する移動経路決定部416と、を有する。
記憶装置42は、実装処理のスケジュールデータを記憶するスケジュールデータ記憶部421と、実装処理を制御するコンピュータプログラムを記憶するプログラム記憶部422と、基板Pに実装される電子部品Cの外形を示す部品データを記憶する部品データ記憶部423と、電子部品Cを基板Pに実装するか否かの判定について使用される許容値を記憶する許容値記憶部424と、を有する。
スケジュールデータは、基板Pに実装される電子部品Cのリスト、電子部品Cの実装の順番、及び基板Pにおける電子部品Cの実装位置を少なくとも一つを含む。
部品データは、X軸方向、Y軸方向、及びZ軸方向のそれぞれにおける電子部品CのボディCbの外形の寸法を含む。また、部品データは、ボディCbの下面から突出するZ軸方向におけるリードClの寸法(長さL)を含む。また、部品データは、XY平面内におけるボディCbとリードClの先端部Tとの目標相対位置を含む。ボディCbとリードClの先端部Tとの目標相対位置は、ボディCbとリードClの先端部Tとの理想的な相対位置であって、電子部品Cの設計データにおけるボディCbとリードClの先端部Tとの相対位置である。また、部品データは、XY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置を含む。第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの理想的な相対位置であって、電子部品Cの設計データにおける第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置である。
実装制御部411は、スケジュールデータ記憶部421からスケジュールデータを読み込み、プログラム記憶部422からコンピュータプログラムを読み込む。電子部品Cの実装処理において、実装制御部411は、スケジュールデータ及びコンピュータプログラムに従って、X駆動装置110及びY駆動装置111の少なくとも一方に制御信号を出力して、フィーダ200の部品供給位置PJaに実装ヘッド106を移動し、Z駆動装置113に制御信号を出力してノズル10を下降させて、部品供給位置PJaに配置されている電子部品Cをノズル10で保持する。電子部品Cがノズル10で保持された後、実装制御部411は、スケジュールデータ及びコンピュータプログラムに従って、X駆動装置110及びY駆動装置111の少なくとも一方に制御信号を出力して、実装位置PJbに実装ヘッド106を移動し、Z駆動装置113に制御信号を出力してノズル10を下降させて、ノズル10に保持されている電子部品Cを基板Pに実装する。実装制御部411は、スケジュールデータに規定されている全ての電子部品Cについて実装処理を実施する。
照明制御部412は、照明装置20の発光素子22及び発光素子23の発行動作を制御する制御信号を出力する。照明装置20は、照明制御部412から出力された制御信号に基づいて、規定のタイミングで、ケース21の内部空間に配置されている電子部品Cを照明する。
撮像制御部413は、撮像装置30の撮像動作を制御する制御信号を出力する。撮像装置30は、撮像制御部413から出力された制御信号に基づいて、規定のタイミングで、ケース21の内部空間に配置されている電子部品Cを撮像する。
距離設定部414は、撮像装置30で電子部品Cを撮像するときの電子部品Cと撮像装置30との距離Hを設定する。本実施形態において、電子部品Cと撮像装置30とが異なる複数の距離Hのそれぞれだけ離れているときにおいて、電子部品Cが撮像装置30に撮像される。距離設定部414は、撮像装置30が電子部品Cを撮像するときの電子部品Cと撮像装置30との複数の距離Hを設定する。
ノズル10で保持された電子部品Cが基板Pに実装される前に、そのノズル10で保持された電子部品Cが撮像装置30で撮像される。制御部4は、Z軸方向において異なる複数の位置のそれぞれに電子部品Cが配置されるように、Z駆動装置113を制御する。撮像装置30は、Z軸方向において異なる複数の位置のそれぞれに配置された電子部品Cを下方から撮像する。
図7は、本実施形態に係る撮像装置30の撮像動作の一例を模式的に示す図である。図7に示すように、電子部品Cの着目部位と撮像装置30とが異なる複数の距離Hのそれぞれだけ離れているときに、撮像装置30による電子部品Cの撮像動作が実施される。
距離設定部414は、電子部品Cの着目部位が撮像装置30の光学系31の焦点FPよりも前側(−Z側)及び後側(+Z側)のそれぞれに配置されるように、電子部品Cの着目部位と撮像装置30の光学系31の焦点FPとの複数の距離Hを設定する。
撮像装置30は、電子部品Cと撮像装置30の光学系31の焦点FPとが異なる複数の距離Hのそれぞれだけ離れているときにおいて、電子部品Cを撮像して、電子部品Cの画像データを取得する。換言すれば、撮像装置30は、Z駆動装置113の作動により、電子部品Cと撮像装置30の光学系31の焦点FPとの距離Hを変えながら電子部品Cの複数の画像データを撮像する。
本実施形態において、電子部品Cの着目部位は、少なくとも電子部品CのボディCb及び電子部品CのリードClの先端部Tを含む。距離設定部414は、複数の撮影動作のうち一部の撮像動作においては、電子部品Cの着目部位が光学系31の焦点FPの前側(−Z側)に配置されるように、電子部品Cの着目部位と光学系31の焦点FPとの距離Hを設定し、別の一部の撮像動作においては、電子部品Cの着目部位が光学系31の焦点FPの後側(+Z側)に配置されるように、電子部品Cの着目部位と光学系31の焦点FPとの距離Hを設定する。
Z軸方向における光学系31の焦点FPの位置は、例えば光学系31の諸元データから導出される既知データである。また、Z軸方向におけるノズル10の先端部の位置は、Z駆動装置113の駆動量に基づいて検出される。なお、Z軸方向におけるノズル10の先端部の位置を検出する位置センサが設けられ、その位置センサによってZ軸方向におけるノズル10の先端部の位置が検出されてもよい。また、ボディCbの外形の寸法及び電子部品CのリードClの長さLは、部品データ記憶部423に記憶されている部品データから導出される。したがって、距離設定部414は、Z軸方向におけるノズル10の先端部の位置と、そのノズル10に保持されている電子部品Cの部品データとに基づいて、Z軸方向における電子部品Cの着目部位の位置を算出することができる。距離設定部414は、光学系31の焦点FPの位置と電子部品Cの部品データとに基づいて、複数の撮像動作のうち一部の撮像動作においては、電子部品Cの着目部位が焦点FP付近に配置され、別の一部の撮像動作においては、電子部品Cの着目部位が焦点FPよりも前側及び後側のそれぞれに配置されるように、複数の距離Hを設定することができる。
図6において、画像処理部5は、撮像装置30で取得された電子部品Cの画像データを画像処理する。距離Hを変えながら撮像装置30で撮像された電子部品Cの複数の画像データは、コンピュータシステム40に出力される。
画像処理部5は、距離Hを変えながら撮像装置30で撮像された電子部品Cの複数の画像データに基づいて、電子部品Cの全焦点画像を生成する。また、画像処理部5は、電子部品Cの全焦点画像に基づいて、基板Pの表面と平行なXY平面内におけるボディCbとリードClの先端部Tとの相対位置を算出する。また、画像処理部5は、電子部品Cの全焦点画像に基づいて、基板Pの表面と平行なXY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を算出する。
本実施形態においては、光学系31を有し電子部品Cと光学系31の焦点FPとの距離Hを変えながら電子部品Cの複数の画像データを撮像する撮像装置30と、電子部品Cの複数の画像データに基づいて電子部品Cの全焦点画像を生成してボディCbとリードClの先端部Tとの相対位置を算出する画像処理部5とにより、基板Pの表面と平行なXY面内におけるボディCbとリードClの先端部Tとの相対位置を検出する検出装置300が構成される。以下の説明においては、撮像装置30及び画像処理部5を合わせて適宜、検出装置300、と称する。
制御部4は、検出装置300で検出されたXY平面内におけるボディCbとリードClの先端部Tとの相対位置に基づいて、電子部品Cを基板Pに実装するか否かを判定する。電子部品Cを基板Pに実装すると判定した場合、制御部4は、画像処理部5で生成された電子部品Cの全焦点画像に基づいて、光学系31の光軸AXと直交するXY平面内における電子部品Cの位置を調整して、電子部品Cを基板Pに実装する。制御部4は、電子部品Cの全焦点画像に基づいて、XY平面内における電子部品CのリードClの先端部の位置を算出して、リードClが基板Pの開口に挿入されるように、実装ヘッド移動装置107を制御して、ノズル10に保持されている電子部品CのXY平面内における位置を調整する。
画像処理部5は、撮像装置30で撮像された電子部品Cの画像データを取得する画像データ取得部511と、画像データのそれぞれの画素におけるコントラストを算出するコントラスト算出部512と、算出コントラストに基づいて電子部品Cの着目部位の合焦点位置HFを算出する測距処理部513と、算出された合焦点位置HFに基づいて電子部品Cの全焦点画像を生成する全焦点画像生成部514と、生成された電子部品Cの全焦点画像に基づいてXY平面内における電子部品CのボディCbとリードClの先端部Tとの相対位置を算出する相対位置算出部515と、を有する。
記憶装置42は、測距処理部513で算出された合焦点位置HFを記憶する合焦点位置記憶部521と、全焦点画像生成部514で生成された全焦点画像を記憶する全焦点画像記憶部522と、を有する。
画像データ取得部511は、電子部品Cと撮像装置30とが異なる複数の距離Hのそれぞれだけ離れているときにおいて撮像装置30で撮像された電子部品Cの複数の画像データを取得する。
画像データ取得部511に取得される電子部品Cの複数の画像データは、撮像装置30から出力されるアナログ画像信号をデジタル画像信号に変換することによって生成される。画像データは、複数の画素を含む。画像データ取得部511に取得される画像データは、複数の画素のそれぞれについて検出された輝度値を示す。
コントラスト算出部512は、複数の画像データの電子部品Cの着目部位を含む同一の着目画素のそれぞれのコントラストを算出する。
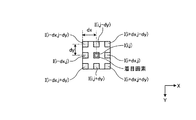
図8は、本実施形態に係るコントラストの算出方法を説明するための模式図である。コントラストの算出対象である着目画素のXY平面内における座標値を(i,j)とし、着目画素(i,j)の輝度値をI(i,j)とし、着目画素(i,j)から+X方向に距離dxだけ離れた画素の輝度値をI(i+dx,j)とし、着目画素(i,j)から−X方向に距離dxだけ離れた画素の輝度値をI(i−dx,j)とし、着目画素(i,j)から+Y方向に距離dyだけ離れた画素の輝度値をI(i,j+dy)とし、着目画素(i,j)から−Y方向に距離dyだけ離れた画素の輝度値をI(i,j−dy)とし、着目画素(i,j)から+X方向に距離dxだけ離れ+Y方向に距離dyだけ離れた画素の輝度値をI(i+dx,j+dy)とし、着目画素(i,j)から+X方向に距離dxだけ離れ−Y方向に距離dyだけ離れた画素の輝度値をI(i+dx,j−dy)とし、着目画素(i,j)から−X方向に距離dxだけ離れ−Y方向に距離dyだけ離れた画素の輝度値をI(i−dx,j−dy)とし、着目画素(i,j)から−X方向に距離dxだけ離れ+Y方向に距離dyだけ離れた画素の輝度値をI(i−dx,j+dy)としたとき、着目画素(i,j)のコントラストLm(i,j)は、(1)式に基づいて算出される。
すなわち、(1)式に示すように、コントラスト算出部512は、着目画素(i,j)の周囲の8つの画素の輝度値のそれぞれと着目画素の輝度値との差分の総和を、着目画素(i,j)におけるコントラストLm(i,j)として算出する。
なお、距離dx及び距離dyは予め定められた整数であり、一例として、1個の画素の大きさでもよいし、10個の画素の大きさでもよい。
なお、着目画素(i,j)におけるコントラストLm(i,j)の算出方法は、(1)式に基づかなくてもよい。
着目画素(i,j)におけるコントラストLm(i,j)が算出された後、コントラスト算出部512は、画像データにおける全画素について、コントラストLm(i,j)に基づいて、(2)式に従って平滑化を実施する。
図9は、本実施形態に係るコントラストの平滑化を説明するための模式図である。図9に示すように、着目画素についてコントラストの平滑化を実施する場合、コントラスト算出部512は、着目画素を中心とする加算領域の全画素のコントラストの値を平均化することによって、コントラストを平滑化する。図9に示す例において、加算領域は、一辺が2N+1個の正方形の領域である。なお、Nは予め定められた整数であり、例えば解像度に応じて適宜選択される。
コントラスト算出部512は、複数の画像データの全ての画素のそれぞれについて、コントラストLの算出及び平滑化を実施する。本実施形態において、(1)式に基づいてコントラストLmを算出する処理は、1次フィルタ処理に相当し、(2)式に基づいてコントラストLmを平滑化する処理は、2次フィルタ処理に相当する。
以上により、複数の画像データの全ての画素のそれぞれについて、平滑化されたコントラスト値(2次フィルタ値)が算出される。
図10は、本実施形態に係る電子部品Cと撮像装置30との距離と着目画素のコントラストとの関係を模式的に示す図である。電子部品Cと撮像装置30とが異なる複数の距離Hのそれぞれだけ離れているときに撮像装置30で撮像された電子部品Cの複数の画像データが取得される。
測距処理部513は、着目画素の平滑化されたコントラストに基づいて、着目画素における合焦点位置HFを算出する。測距処理部513は、少なくとも着目画素における電子部品Cの着目部位の合焦点位置HFを算出する。電子部品Cの着目部位は、着目画素に含まれる。電子部品Cの着目部位を含む着目画素における合焦点位置HFが算出される。
着目画素における電子部品Cの着目部位が合焦点位置HFに近いほど、コントラストは高い値を示す。合焦点位置HFとは、電子部品Cの着目部位が光学系31の焦点FPと合致する位置をいう。
図11は、本実施形態に係る合焦点位置HFの算出方法を説明するための図である。図11は、電子部品Cと撮像装置30との距離Hと着目画素のコントラストとの関係を示すダイアグラムである。図11は、図10の一部を抽出した図に相当する。図11に示すダイアグラムにおいて、横軸は、電子部品Cと撮像装置30との距離Hを示し、縦軸は、電子部品Cの着目部位を含む着目画素におけるコントラストを示す。
本実施形態においては、同一の着目画素についての複数のコントラストに基づいて、その着目画素における電子部品Cの着目部位の合焦点位置HFが算出される。
図11に示す例においては、電子部品Cと撮像装置30との距離Hが複数段階で変更された状態のそれぞれにおいて、電子部品Cの画像データが取得され、それら複数の画像データの同一の着目画素のそれぞれのコントラストが算出される。被写体が光学系31の焦点FPに近い位置に配置されるほど、すなわち合焦点位置HPに近いほど、コントラストは高い値を示す。複数のコントラストが平滑化されることによってコントラスト曲線が得られる。コントラスト曲線においてコントラストの最大値を示す電子部品Cと撮像装置30との距離に基づいて、着目画素における電子部品Cの着目部位の合焦点位置HFが算出される。
本実施形態において、電子部品Cの着目部位は、少なくとも電子部品CのボディCbの外形及び電子部品CのリードClの先端部Tを含む。測距処理部513は、着目画素におけるボディCbの外形の合焦点位置HFを算出する。また、測距処理部513は、着目画素におけるリードClの先端部Tの合焦点位置HFを算出する。算出されたボディCbの外形の合焦点位置HF及びリードClの先端部Tの合焦点位置HFは、合焦点位置記憶部521に記憶される。
本実施形態においては、着目画素におけるボディCbの外形の合焦点位置HF及びリードClの先端部Tの合焦点位置HFのみならず、電子部品Cの複数の部位のそれぞれを含む複数の画素における合焦点位置が算出される。複数の画素のそれぞれにおける電子部品Cの複数の部位の合焦点位置は、合焦点位置記憶部521に記憶される。
全焦点画像生成部514は、電子部品Cの複数の部位のそれぞれを含む複数の画素における合焦点位置HFに基づいて、電子部品Cの全焦点画像を生成する。全焦点画像生成部514は、合焦点位置記憶部521に記憶されている複数の画素のそれぞれにおける合焦点位置HFに基づいて、全焦点画像を生成する。これにより、複数の画素のそれぞれについて焦点が合っている全焦点画像が生成される。生成された全焦点画像は、全焦点画像記憶部522に記憶される。
相対位置算出部515は、全焦点画像生成部514で生成された電子部品Cの全焦点画像に基づいて、XY平面内におけるボディCbとリードClの先端部Tとの相対位置を算出する。本実施形態において、相対位置算出部515は、電子部品Cの全焦点画像に基づいて、ノズル10に保持されたボディCbの外形と、第1リードCl1の先端部Tと、第2リードCl2の先端部TとのXY平面内における相対位置を算出する。
判定部415は、相対位置算出部515で算出されたXY平面内におけるボディCbとリードClの先端部Tとの相対位置に基づいて、電子部品Cを基板Pに実装するか否かを判定する。
判定部415は、相対位置算出部515で算出されたXY平面内におけるボディCbとリードClの先端部Tとの相対位置を示す検出相対位置Lasと、部品データ記憶部423に記憶されているXY平面内におけるボディCbとリードClの先端部Tとの相対位置を示す目標装置位置Larとの誤差Δaに基づいて、電子部品Cを基板Pに実装するか否かを判定する。
また、判定部415は、相対位置算出部515で算出されたXY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す検出相対位置Lbsと、部品データ記憶部423に記憶されているXY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す目標装置位置Lbrとの誤差Δbに基づいて、電子部品Cを基板Pに実装するか否かを判定する。
本実施形態において、検出装置300で検出されたXY平面内におけるボディCbの位置は、検出装置300で検出されたXY平面内におけるボディCbの下面の中心点Asの位置であることとする。部品データ記憶部423に記憶されているXY平面内におけるボディCbの位置は、部品データ記憶部423に記憶されているXY平面内におけるボディCbの下面の中心点Arの位置であることとする。
検出装置300で検出されたXY平面内におけるリードClの位置は、検出装置300で検出されたXY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの間の中間点Bsの位置であることとする。部品データ記憶部423に記憶されているXY平面内におけるリードClの位置は、部品データ記憶部423に記憶されているXY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの間の中間点Brの位置であることとする。
ボディCbとリードClの先端部Tとの検出相対位置Lasは、全焦点画像における中心点Asと中間点Bsとの距離であることとする。ボディCbとリードClの先端部Tとの目標相対位置Larは、設計データにおける中心点Arと中間点Brとの距離であることとする。誤差Δaは、距離Lasと距離Larとの差であることとする。
第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsは、全焦点画像における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの距離であることとする。第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置Lbrは、設計データにおける第1リードCl1の先端部Tと第2リードCl2の先端部Tとの距離であることとする。誤差Δbは、距離Lbsと距離Lbrとの差であることとする。
図12は、図3に示した電子部品Cの全焦点画像の一例を示す図である。図12は、電子部品Cを下方から見たときの全焦点画像に相当する。
図3に示した電子部品Cにおいて、リードClの基端部Bは曲がってなく、ボディCbの下面から真っ直ぐ下方向に突出し、第1リードCl1と第2リードCl2とは平行である。図3に示した電子部品Cの形状は、理想的な形状であり、部品データ記憶部423に記憶されている設計データにおける電子部品Cの形状と近似する。検出装置300で検出されたボディCbとリードClの先端部Tとの相対位置を示す検出相対位置Lasと、部品データ記憶部423に記憶されている設計データにおける電子部品CのボディCbとリードClの先端部Tとの相対位置を示す目標相対位置Larとは、近似する。また、検出装置300で検出された第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す検出相対位置Lbsと、部品データ記憶部423に記憶されている設計データにおける第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す目標装置位置Lbrとは、近似する。
なお、設計データにおける中心点Arと中間点Brとは一致しており、図12において目標相対位置Larは図示されていない。
図12に示すように、検出装置300で検出された全焦点画像におけるボディCbとリードClの先端部Tとの検出相対位置Lasと、部品データ記憶部423に記憶されているボディCbとリードClの先端部Tとの目標相対位置Larとの誤差Δaは、小さい。また、検出装置300で検出された全焦点画像における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsと、部品データ記憶部423に記憶されている第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置Lbrとの誤差Δbは、小さい。
図13は、本実施形態に係る電子部品Cの一例を模式的に示す側面図である。図14は、図13に示した電子部品Cの全焦点画像の一例を示す図である。図14は、電子部品Cを下方から見たときの全焦点画像に相当する。
図13に示す電子部品Cにおいて、第1リードCl1と第2リードCl2とは平行であるものの、リードClの基端部Bは曲がっており、ボディCbの下面から傾斜する方向に突出する。図13に示す電子部品Cの形状は、部品データ記憶部423に記憶されている設計データにおける電子部品Cの形状とは異なる。検出装置300で検出されたボディCbとリードClの先端部Tとの相対位置を示す検出相対位置Lasと、部品データ記憶部423に記憶されている設計データにおける電子部品CのボディCbとリードClの先端部Tとの相対位置を示す目標相対位置Larとは、異なる。一方、第1リードCl1と第2リードCl2とは平行であるため、検出装置300で検出された第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す検出相対位置Lbsと、部品データ記憶部423に記憶されている設計データにおける第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す目標装置位置Lbrとは、近似する。
図14に示すように、検出装置300で検出された全焦点画像におけるボディCbとリードClの先端部Tとの検出相対位置Lasと、部品データ記憶部423に記憶されているボディCbとリードClの先端部Tとの目標相対位置Larとの誤差Δaは、大きい。一方、第1リードCl1と第2リードCl2とは平行であるため、検出装置300で検出された全焦点画像における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsと、部品データ記憶部423に記憶されている第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置Lbrとの誤差Δbは、小さい。
図15は、本実施形態に係る電子部品Cの一例を模式的に示す側面図である。図16は、図15に示した電子部品Cの全焦点画像の一例を示す図である。図16は、電子部品Cを下方から見たときの全焦点画像に相当する。
図15に示す電子部品Cにおいて、リードClの基端部Bは曲がっており、ボディCbの下面から傾斜する方向に突出する。また、第1リードCl1と第2リードCl2とは平行ではなく、異なる方向に突出する。図16に示す電子部品Cの形状は、部品データ記憶部423に記憶されている設計データにおける電子部品Cの形状とは異なる。検出装置300で検出されたボディCbとリードClの先端部Tとの相対位置を示す検出相対位置Lasと、部品データ記憶部423に記憶されている設計データにおける電子部品CのボディCbとリードClの先端部Tとの相対位置を示す目標相対位置Larとは、異なる。また、検出装置300で検出された第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す検出相対位置Lbsと、部品データ記憶部423に記憶されている設計データにおける第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を示す目標装置位置Lbrとは、異なる。
図16に示すように、検出装置300で検出された全焦点画像におけるボディCbとリードClの先端部Tとの検出相対位置Lasと、部品データ記憶部423に記憶されているボディCbとリードClの先端部Tとの目標相対位置Larとの誤差Δaは、小さい。また、検出装置300で検出された全焦点画像における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsと、部品データ記憶部423に記憶されている第1リードCl1の先端部Tと第2リードCl2の先端部Tとの目標相対位置ΔLbrとの誤差Δbは、大きい。
本実施形態において、判定部415は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsの誤差Δbが、許容値記憶部424に記憶されている第1許容値よりも大きいと判定したときに、電子部品Cを基板Pに実装しないと判定する。すなわち、電子部品Cが図15及び図16を参照して説明した状態である場合、判定部415は、その電子部品Cを基板Pに実装しないと判定する。
また、判定部415は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsの誤差Δbが許容値記憶部424に記憶されている第1許容値以下であり、ボディCbとリードClの先端部Tとの検出相対位置Lasの誤差Δaが第2許容値よりも大きいと判定したときに、電子部品Cを基板Pに実装しないと判定する。すなわち、電子部品Cが図13及び図14を参照して説明した状態である場合において、第1リードCl1と第2リードCl2とは平行であるものの、第1リードCl1及び第2リードCl2が過度に傾斜している場合、判定部415は、その電子部品Cを基板Pに実装しないと判定する。
また、判定部415は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsの誤差Δbが第1許容値以下であり、ボディCbとリードClの先端部Tとの検出相対位置Lasの誤差Δaが第2許容値以下であると判定したときに、電子部品Cを基板Pに実装すると判定する。すなわち、電子部品Cが図3及び図12を参照して説明した状態である場合、又は電子部品Cが図13及び図14を参照して説明した状態である場合において、第1リードCl1及び第2リードCl2の傾斜が小さい場合、判定部415は、その電子部品Cを基板Pに実装すると判定する。
移動経路決定部416は、リードClを基板Pの開口に挿入するときのノズル10の移動経路を決定する。
移動経路決定部416は、ボディCbとリードClの先端部Tとの検出相対位置Lasの誤差Δaが第2許容値以下であると判定したときに、ボディCbとリードClの先端部Tとの検出相対位置Lasと部品データ記憶部423に記憶されているリードClの長さLとに基づいて、リードClを基板Pの開口に挿入するときのノズル10の移動経路を決定する。すなわち、電子部品Cの第1リードCl1及び第2リードCl2が図13及び図14を参照して説明したように傾斜している場合、第1リードCl1及び第2リードCl2が基板Pの開口に挿入されるように、第1リードCl1及び第2リードCl2の傾斜に合わせて、ノズル10の移動経路を最適化する。
移動経路決定部416は、ボディCbとリードClの先端部Tとの検出相対位置Lasの誤差Δaが第2許容値以下であると判定したときに、その検出相対位置LasとリードClの長さLとに基づいて、リードClの先端部Tが基板Pの開口に位置する第1状態からリードClの中間部Mが基板Pの開口に位置する第2状態を経てリードClの基端部Bが基板Pの開口に位置する第3状態に変化するように、ボディCbを保持したノズル10の移動経路を決定する。
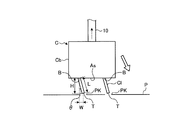
図17は、本実施形態に係るノズル10の移動経路を説明するための説明図である。図17に示すように、ボディCbの下面におけるリードClの基端部Bの位置及びリードClの長さLは、部品データ記憶部423に記憶されている既知データである。そのため、移動経路決定部416は、検出装置300で検出されたボディClとリードClの先端部Tとの検出相対位置Lasに基づいて、XY平面内におけるリードClの基端部Bと先端部Tとの距離Wを算出することができる。また、測距処理部513により先端部Tの合焦点位置HFが算出される。そのため、移動経路決定部416は、Z軸方向における基端部Bと先端部Tとの距離Hを算出することができる。移動経路決定部416は、リードClの長さLと、距離Wと、距離Hとに基づいて、リードClの傾きを示す角度θを算出することができる。移動経路決定部416は、角度θに基づいて、リードClの先端部Tが基板Pの開口PKに位置する第1状態から、リードClの中間部Mが基板Pの開口PKに位置する第2状態を経て、リードClの基端部Bが基板Pの開口PKに位置する第3状態に変化するように、リードClを基板Pの開口PKに挿入するときのノズル10の移動経路を決定する。
移動経路が決定された後、図17に示すように、実装制御部411は、リードClの先端部Tが開口PKの中心に位置するように、ボディCbを保持したノズル10をXY平面内において移動する。
ボディCbがノズル10に保持された状態で、リードClが撮像装置30に撮像され、XY平面内におけるリードClの先端部Tの位置が決定される。また、XY平面内における基板Pの位置が基板位置検出装置(不図示)により検出される。基板位置検出装置は、例えば基板Pの表面に設けられている基準マークを検出する。基準マークと開口PKとの位置関係は、例えば基板Pの設計データから取得可能な既知データである。これにより、XY平面内における開口PKの位置が決定される。これにより、XY平面内におけるリードClの先端部Tと基板Pの開口PKとの位置関係が算出される。そのため、実装制御部411は、リードClの先端部Tを基板Pの開口PKの中心に位置付けることができる。
次に、実装制御部411は、リードClの先端部Tが開口PKに位置する第1状態から、リードCの中間部Mが開口PKに位置する第2状態になるように、ノズル10をXY平面内において移動させながら−Z方向に移動させる。
図18は、本実施形態に係る電子部品CのリードClが基板Pの開口PKに挿入されるときの状態を模式的に示す図である。ボディCbを保持したノズル10がXY平面内において移動しながら−Z方向に移動することにより、図17に示したような、リードClの先端部Tが基板Pの開口PKに位置する第1状態から、図18に示すような、リードClの中間部Mが基板Pの開口PKに位置する第2状態に変化する。
実装制御部411は、ノズル10の移動経路において、リードClの中間部Mが基板Pの開口PKに位置したときに、ノズル10による電子部品Cの保持を解放する。本実施形態においては、リードClの中間部Mが基板Pの開口PKに位置したとき、ノズル10の吸引口と接続されている真空源による吸引が解除される。これにより、電子部品Cはノズル10から解放される。
図19は、本実施形態に係る電子部品CのリードClが基板Pの開口PKに挿入されるときの状態を模式的に示す図である。リードClの中間部Mが開口PKに位置したときにノズル10による電子部品Cの保持が解除されることにより、図18に示したような、リードClの中間部Mが基板Pの開口PKに位置する第2状態から、図19に示すような、リードClの基端部Bが基板Pの開口PKに位置する第3状態に変化する。本実施形態においては、リードClの中間部Mが開口PKに位置したときにノズル10による電子部品Cの保持が解除されることにより、電子部品Cは、重力作用(自重)により、−Z方向に移動する。リードClが開口PKにガイドされながら、電子部品Cは、XY平面内において移動しながら−Z方向に移動する。
[電子部品実装方法]
図20は、本実施形態に係る電子部品実装方法の一例を示すフローチャートである。実装制御部411は、ノズル10を部品供給位置PJaに移動して、フィーダ200から供給された電子部品Cをノズル10で保持する。実装制御部411は、電子部品Cを保持したノズル10を撮像装置30に移動する。
撮像制御部413は、ノズル10に保持された電子部品Cと光学系31の焦点FPとの距離Hを変えながら、撮像装置30を制御して、電子部品Cの複数の画像データを撮像する。複数の画像データは、画像処理部5に出力される。画像処理部5は、電子部品Cの複数の画像データに基づいて、電子部品Cの全焦点画像を生成して、XY平面内におけるボディCbとリードClの先端部Tとの相対位置を検出する。また、画像処理部5は、電子部品Cの全焦点画像に基づいて、XY平面内における第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置を検出する(ステップS10)。
判定部415は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsと目標相対位置Lbrとの誤差Δbが第1許容値以下か否かを判定する(ステップS20)。
ステップS20において、誤差Δbが第1許容値以下であると判定したとき(ステップS20:Yes)、判定部415は、ボディCbとリードClの先端部Tとの検出相対位置Lasと目標相対位置Larとの誤差Δaが第2許容値以下か否かを判定する(ステップS30)。
ステップS30において、誤差Δaが第2許容値以下であると判定したとき(ステップS30:Yes)、判定部415は、電子部品Cを基板Pに実装すると判定する。
移動経路決定部416は、検出相対位置LasとリードClの長さLとに基づいて、ボディClを保持したノズル10の移動経路を決定する(ステップS40)。
実装制御部411は、電子部品Cを保持したノズル10を実装位置PJbに移動する。実装制御部411は、移動経路決定部416で決定された移動経路に基づいてノズル10を移動させて、電子部品CのリードClを基板Pの開口PKに挿入する。これにより、図17から図19を参照して説明したように、リードClの先端部Tが基板Pの開口PKに位置する第1状態から、リードClの中間部Mが基板Pの開口に位置する第2状態を経て、リードClの基端部Bが基板Pの開口PKに位置する第3状態に変化する。リードClの基端部Bが基板Pの開口PKに位置することにより、電子部品Cが基板Pに実装される(ステップS50)。
ステップS20において、誤差Δbが第1許容値よりも大きいと判定したとき(ステップS20:No)、判定部415は、電子部品Cを基板Pに実装しないと判定する(ステップS60)。ノズル10に保持されている電子部品Cは、例えば廃棄される。
ステップS30において、誤差Δaが第2許容値よりも大きいと判定したとき(ステップS30:No)、判定部415は、電子部品Cを基板Pに実装しないと判定する(ステップS60)。ノズル10に保持されている電子部品Cは、例えば廃棄される。
[効果]
以上説明したように、本実施形態によれば、挿入型電子部品において、ボディCbとリードClの先端部Tとの相対位置が検出装置300によって検出される。ボディCbとリードClの先端部Tとの相対位置が検出されることにより、例えば図13を参照して説明したように、電子部品CのリードClの基端部Bが曲がっている場合、リードClの基端部Bが曲がっていることを検出することができる。例えば、リードClの先端部Tのみが検出される場合、図13を参照して説明したように、第1リードCl1と第2リードCl2とが平行であると、基端部Bが曲がっているにもかかわらず、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置に基づいて、その電子部品Cは正常であると誤認識してしまう可能性がある。リードClの基端部Bが曲がっていても、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの相対位置が正常である場合、第1リードCl1の先端部T及び第2リードCl2の先端部Tは、基板Pの開口PKに挿入可能であるため、リードClの基端部Bが曲がっている電子部品Cの実装動作が実施されることとなる。リードClの基端部Bが曲がっている場合、リードClの先端部Tを基板Pの開口PKに挿入した後、電子部品Cを保持したノズル10を真っ直ぐに−Z方向に移動させてしまうと、リードClを無理矢理に基板Pの開口PKに挿入することとなり、リードClに負荷がかかる可能性がある。その結果、リードClが変形してしまい、実装不良が発生する可能性がある。
本実施形態によれば、ボディCbとリードClの先端部Tとの相対位置が検出装置300によって検出され、その検出結果に基づいて、リードClの基端部Bが曲がっているか否かが判定される。リードClの基端部Bが大きく曲がっていると判定された場合、電子部品Cを基板Pに実装しないようにすることにより、実装不良の発生が抑制される。これにより、不良デバイスの製造が抑制され、生産性の低下が抑制される。
また、本実施形態によれば、検出装置300は、光学系31を有し電子部品Cと光学系31の焦点FPとの距離Hを変えながら電子部品Cの複数の画像データを撮像する撮像装置30と、電子部品Cの複数の画像データに基づいて電子部品Cの全焦点画像を生成して検出相対位置を算出する画像処理部5と、を有する。これにより、電子部品Cの全焦点画像に基づいて、ボディCbとリードClの先端部Tとの相対位置を高精度に検出することができる。
また、本実施形態によれば、検出装置300は、ノズル10に保持されたボディCbと第1リードCl1の先端部Tと第2リードCl2の先端部TとのXY平面内における相対位置を検出する。制御部4は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsの誤差Δbが第1許容値よりも大きいと判定したときに、電子部品Cを基板Pに実装しないと判定する。誤差Δbが大きい場合、第1リードCl1及び第2リードCl2を基板Pの2つの開口PKのそれぞれに挿入することができない。本実施形態によれば、ノズル10に保持されたボディCbと第1リードCl1の先端部Tと第2リードCl2の先端部TとのXY平面内における相対位置が検出される。そのため、電子部品Cを基板Pに実装可能か否かが適切に判定される。
また、本実施形態によれば、制御部4は、検出相対位置Lbsの誤差Δbが第1許容値以下であり、ボディCbとリードClの先端部Tとの検出相対位置Lasの誤差Δaが第2許容値よりも大きいと判定したときに、電子部品Cを基板Pに実装しないと判定する。誤差Δbが第1許容値以下であっても、リードClが大きく傾いてしまっていて、誤差Δaが第2許容値よりも大きい場合、その電子部品Cを基板Pに実装しようとすると、実装不良が発生する可能性が高い。本実施形態によれば、誤差Δbが第1許容値以下であっても、誤差Δaが第2許容値よりも大きい場合には、電子部品Cを基板Pに実装する動作は実施されない。そのため、実装不良の発生が抑制され、不良デバイスの製造が抑制される。
また、本実施形態によれば、制御部4は、第1リードCl1の先端部Tと第2リードCl2の先端部Tとの検出相対位置Lbsと目標相対位置Lbrとの誤差Δbが第1許容値以下であり、ボディCbとリードClの先端部Tとの検出相対位置Lasと目標相対位置Larとの誤差Δaが第2許容値以下であると判定したときに、電子部品Cを基板Pに実装すると判定する。誤差Δb及び誤差Δaの両方が小さい場合、電子部品CのリードClは正常であると判定することができる。
また、本実施形態によれば、ボディCbとリードClの先端部Tとの検出相対位置Lasと目標相対位置Larとの誤差Δaが第2許容値以下であると判定したときに、検出相対位置LasとリードClの長さLとに基づいて、ノズル10が傾斜方向に移動するように、ノズル10の移動経路が決定される。これにより、リードClの基端部Bが大きく曲がっていない場合には、リードClの角度θに合わせて、ノズル10の移動経路を決定して、電子部品Cを基板Pに実装することができる。したがって、リジェクトされる電子部品Cの数を抑制することができる。
また、本実施形態によれば、制御部4は、ノズル10を傾斜方向に移動させる移動経路において、リードClの中間部Mが基板Pの開口PKに位置したときに、ノズル10による電子部品Cの保持を解放する。これにより、リードClは、開口PKにガイドされながら、電子部品Cの重力作用(自重)により、開口PKに円滑に挿入される。
なお、上述の実施形態において、リードClの基端部Bが大きく曲がっており、誤差Δbが第1許容値よりも大きい場合、又は誤差Δaが第2許容値よりも大きい場合、その電子部品Cを廃棄せずに、誤差Δb又は誤差Δaに基づいて、リード矯正器を用いて、リードClの曲がりを矯正してもよい。
なお、上述の実施形態においては、ボディCbに2つのリードClが設けられることとした。リードClは、3つ以上の任意の数だけ設けられてもよいし、1つだけ設けられてもよい。ボディCbに設けられるリードClが1つである場合、制御部4は、ボディCbとリードClの先端部Tとの検出相対位置の誤差が第2許容値よりも大きいと判定したときに電子部品Cを基板Pに実装しないと判定し、ボディCbとリードClの先端部Tとの検出相対位置の誤差が第2許容値以下であると判定したときに電子部品Cを基板Pに実装すると判定することができる。
なお、上述の実施形態においては、電子部品Cの全焦点画像が生成され、その電子部品Cの全焦点画像に基づいて、ボディCbとリードClの先端部Tとの相対位置が検出されることとした。ボディCbとリードClの先端部との相対位置を検出可能であれば、全焦点画像を用いる方法に限られず、任意の方法が用いられてもよい。例えば、電子部品CのボディCb及びリードClのそれぞれにレーザ光を照射したときのレーザ光の受光結果に基づいて、ボディCbとリードClの先端部Tとの相対位置が検出されてもよい。また、全焦点画像に基づいてリードClの先端部Tの位置を検出し、レーザ光を照射したときのレーザ光の受光結果に基づいてボディCbの位置を検出してもよい。
なお、上述の実施形態において、ボディCbから突出する突起は、リードClでなくてもよい。例えば、電子部品Cと基板Pとを位置決めするための突起であるボスが電子部品Cのボディに設けられている場合、ボディとボスの先端部との相対位置が検出され、その相対位置に基づいて、電子部品Cを基板Pに実装するか否かが判定されてもよい。
なお、上述の実施形態においては、Z駆動装置113の作動により電子部品Cを保持したノズル10がZ軸方向に移動することによって、電子部品Cと撮像装置30との距離が調整されることとした。撮像装置30をZ軸方向に移動可能な撮像装置移動装置が設けられ、撮像装置移動装置の作動により、電子部品Cと撮像装置30との距離が調整されてもよい。また、電子部品C及び撮像装置30の両方がZ軸方向に移動することによって、電子部品Cと撮像装置30との距離が調整されてもよい。