JP2019014097A - 記録装置、液吸収装置及び制御方法 - Google Patents
記録装置、液吸収装置及び制御方法 Download PDFInfo
- Publication number
- JP2019014097A JP2019014097A JP2017131497A JP2017131497A JP2019014097A JP 2019014097 A JP2019014097 A JP 2019014097A JP 2017131497 A JP2017131497 A JP 2017131497A JP 2017131497 A JP2017131497 A JP 2017131497A JP 2019014097 A JP2019014097 A JP 2019014097A
- Authority
- JP
- Japan
- Prior art keywords
- transfer
- liquid
- unit
- recording
- liquid absorbing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/0057—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material where an intermediate transfer member receives the ink before transferring it on the printing material
Abstract
【課題】転写部と液吸収シート上の領域との組合せに規則性を持たせること。
【解決手段】記録装置は、回転駆動される転写ドラム、前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部、前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段、前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シート及び前記液吸収シートを循環的に回転移動させる駆動手段を備え、前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である。
【選択図】図12
【解決手段】記録装置は、回転駆動される転写ドラム、前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部、前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段、前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シート及び前記液吸収シートを循環的に回転移動させる駆動手段を備え、前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である。
【選択図】図12
Description
本発明は、転写式の記録技術に関する。
転写部にインク像を形成し、紙等の記録媒体にインク像を転写する技術が提案されている。例えば、特許文献1には、中間部材にインク像を形成し当該インク像をシートに転写するための像形成装置が開示されている。この装置は、中間部材に一次像を形成するインクジェットデバイスを備える。また、この装置は、一次像において凝集体を形成するゾーン、凝集体から液体の一部を除去するゾーン、シートに像を転写するゾーンおよび新たな一次像を形成するに先立って中間部材の表面を再生するゾーンを備えている。
転写部を液吸収シートと接触させることにより、インク像の液体成分を吸収する装置構成では、転写部や液吸収シートの表面状態の違い等が記録画像の品質(例えば濃度)に影響を与える。記録画像の品質に対する影響に規則性がある場合、例えば記録データの補正により記録画像の品質を維持することが可能である。しかし、同じ転写部に形成されたインク像であっても、その液体成分を吸収する液吸収シートの接触領域が異なると、記録画像の品質への影響が異なる場合がある。つまり、転写部と液吸収シート上の領域との組合せが記録画像の品質に影響を与える。転写部上のインク像に対する液吸収シートの接触領域がランダムに変化する装置構成では、この組合せに規則性がないことから、記録画像の品質に与える影響を補正することが困難である。
本発明は、転写部と液吸収シート上の領域との組合せに規則性を持たせることのできる技術を提供するものである。
本発明によれば、
回転駆動される転写ドラムと、
前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部と、
前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段と、
前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シートと、
前記液吸収シートを循環的に回転移動させる駆動手段と、を備え、
前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である、
ことを特徴とする記録装置が提供される。
回転駆動される転写ドラムと、
前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部と、
前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段と、
前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シートと、
前記液吸収シートを循環的に回転移動させる駆動手段と、を備え、
前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である、
ことを特徴とする記録装置が提供される。
本発明によれば、転写部と液吸収シート上の領域との組合せに規則性を持たせることができる。
図面を参照して本発明の実施形態について説明する。各図において、矢印XおよびYは水平方向を示し、互いに直交する。矢印Zは上下方向を示す。
<記録システム>
図1は本発明の一実施形態に係る記録システム(記録装置)1を概略的に示した正面図である。記録システム1は、転写体2を介して記録媒体Pにインク像を転写することで記録物P’を製造する、枚葉式のインクジェットプリンタである。記録システム1は、記録装置1Aと、搬送装置1Bとを含む。本実施形態では、X方向、Y方向、Z方向が、それぞれ、記録システム1の幅方向(全長方向)、奥行き方向、高さ方向を示している。記録媒体PはX方向に搬送される。
図1は本発明の一実施形態に係る記録システム(記録装置)1を概略的に示した正面図である。記録システム1は、転写体2を介して記録媒体Pにインク像を転写することで記録物P’を製造する、枚葉式のインクジェットプリンタである。記録システム1は、記録装置1Aと、搬送装置1Bとを含む。本実施形態では、X方向、Y方向、Z方向が、それぞれ、記録システム1の幅方向(全長方向)、奥行き方向、高さ方向を示している。記録媒体PはX方向に搬送される。
なお、「記録」には、文字、図形等有意の情報を形成する場合のみならず、有意無意を問わず、広く記録媒体上に画像、模様、パターン等を形成する、又は媒体の加工を行う場合も含まれ、人間が視覚で知覚し得るように顕在化したものであるか否かを問わない。また、本実施形態では「記録媒体」としてシート状の紙を想定するが、布、プラスチック・フィルム等であってもよい。
インクの成分については、特に限定はないが、本実施形態では、色材である顔料、水、樹脂を含む水性顔料インクを用いる場合を想定する。
<記録装置>
記録装置1Aは、記録ユニット3、転写ユニット4および周辺ユニット5A〜5D、および、供給ユニット6を含む。
記録装置1Aは、記録ユニット3、転写ユニット4および周辺ユニット5A〜5D、および、供給ユニット6を含む。
<記録ユニット>
記録ユニット3は、複数の記録ヘッド30と、キャリッジ31とを含む。図1と図2を参照する。図2は記録ユニット3の斜視図である。記録ヘッド30は、転写体2に液体インクを吐出し、転写体2上に記録画像のインク像を形成する。
記録ユニット3は、複数の記録ヘッド30と、キャリッジ31とを含む。図1と図2を参照する。図2は記録ユニット3の斜視図である。記録ヘッド30は、転写体2に液体インクを吐出し、転写体2上に記録画像のインク像を形成する。
本実施形態の場合、各記録ヘッド30は、Y方向に延設されたフルラインヘッドであり、使用可能な最大サイズの記録媒体の画像記録領域の幅分をカバーする範囲にノズルが配列されている。記録ヘッド30は、その下面に、ノズルが開口したインク吐出面を有しており、インク吐出面は、微小隙間(例えば数mm)を介して転写体2の表面と対向している。本実施形態の場合、転写体2は円軌道上を循環的に移動する構成であるため、複数の記録ヘッド30は、放射状に配置されている。
各ノズルには吐出素子が設けられている。吐出素子は、例えば、ノズル内に圧力を発生させてノズル内のインクを吐出させる素子であり、公知のインクジェットプリンタのインクジェットヘッドの技術が適用可能である。吐出素子としては、例えば電気−熱変換体によりインクに膜沸騰を生じさせ気泡を形成することでインクを吐出する素子、電気−機械変換体によってインクを吐出する素子、静電気を利用してインクを吐出する素子等が挙げられる。高速で高密度の記録の観点からは電気−熱変換体を利用した吐出素子を用いることができる。
本実施形態の場合、記録ヘッド30は、9つ設けられている。各記録ヘッド30は、互いに異なる種類のインクを吐出する。異なる種類のインクとは、例えば、色材が異なるインクであり、イエローインク、マゼンタインク、シアンインク、ブラックインク等のインクである。1つの記録ヘッド30は1種類のインクを吐出するが、1つの記録ヘッド30が複数種類のインクを吐出する構成であってもよい。このように複数の記録ヘッド30を設けた場合、そのうちの一部が色材を含まないインク(例えばクリアインク)を吐出してもよい。
キャリッジ31は、複数の記録ヘッド30を支持する。各記録ヘッド30は、インク吐出面側の端部がキャリッジ31に固定されている。これにより、インク吐出面と転写体2との表面の隙間をより精密に維持することができる。キャリッジ31は、案内部材RLの案内によって、記録ヘッド30を搭載しつつ変位可能に構成されている。本実施形態の場合、案内部材RLは、Y方向に延設されたレール部材であり、X方向に離間して一対設けられている。キャリッジ31のX方向の各側部にはスライド部32が設けられている。スライド部32は案内部材RLと係合し、案内部材RLに沿ってY方向にスライドする。
図3は記録ユニット3の変位態様を示しており、記録システム1の右側面を模式的に示した図である。記録システム1の後部には回復ユニット12が設けられている。回復ユニット12は記録ヘッド30の吐出性能を回復する機構を有する。そのような機構としては、例えば、記録ヘッド30のインク吐出面をキャッピングするキャップ機構、インク吐出面をワイピングするワイパ機構、インク吐出面から記録ヘッド30内のインクを負圧吸引する吸引機構を挙げることができる。
案内部材RLは、転写体2の側方から回復ユニット12に渡って延設されている。記録ユニット3は、案内部材RLの案内により、実線で記録ユニット3を示した吐出位置POS1と、破線で記録ユニット3を示した回復位置POS3との間で変位可能であり、不図示の駆動機構により移動される。
吐出位置POS1は、記録ユニット3が転写体2にインクを吐出する位置であり、記録ヘッド30のインク吐出面が転写体2の表面に対向する位置である。回復位置POS3は、吐出位置POS1から退避した位置であり、記録ユニット3が回復ユニット12上に位置する位置である。回復ユニット12は記録ユニット3が回復位置POS3に位置した場合に、記録ヘッド30に対する回復処理を実行可能である。本実施形態の場合、記録ユニット3が回復位置POS3に到達する前の移動途中においても回復処理を実行可能である。吐出位置POS1と回復位置POS3の間には予備回復位置POS2があり、回復ユニット12は記録ヘッド30が吐出位置POS1から回復位置POS3へ移動している間に、予備回復位置POS2において記録ヘッド30に対する予備的な回復処理を実行可能である。
<転写ユニット>
図1を参照して転写ユニット4について説明する。転写ユニット4は、転写ドラム(転写胴)41と圧胴42とを含む。これらの胴は、Y方向の回転軸周りに回転する回転体であり、円筒形状の外周面を有している。図1において、転写ドラム41および圧胴42の各図形内に示した矢印は、これらの回転方向を示しており、転写ドラム41は時計回りに、圧胴42は反時計回りに回転する。
図1を参照して転写ユニット4について説明する。転写ユニット4は、転写ドラム(転写胴)41と圧胴42とを含む。これらの胴は、Y方向の回転軸周りに回転する回転体であり、円筒形状の外周面を有している。図1において、転写ドラム41および圧胴42の各図形内に示した矢印は、これらの回転方向を示しており、転写ドラム41は時計回りに、圧胴42は反時計回りに回転する。
転写ドラム41は、その外周面に転写体2を支持する支持体である。転写体2の表面はインク像が形成される転写部を形成する。転写体2は、転写ドラム41の外周面上に、周方向に連続的にあるいは間欠的に設けられる。連続的に設けられる場合、転写体2は無端の帯状に形成される。間欠的に設けられる場合、転写体2は、有端の帯状に複数のセグメントに分けて形成され、各セグメントは転写ドラム41の外周面に等ピッチで円弧状に配置することができる。
転写ドラム41の回転により、転写体2は円軌道上を循環的に移動する。転写ドラム41の回転位相により、転写体2の位置は、吐出前処理領域R1、吐出領域R2、吐出後処理領域R3およびR4、転写領域R5、転写後処理領域R6に区別することができる。転写体2はこれらの領域を循環的に通過する。
吐出前処理領域R1は、記録ユニット3によるインクの吐出前に転写体2に対する前処理を行う領域であり、周辺ユニット5Aによる処理が行われる領域である。本実施形態の場合、反応液が付与される。吐出領域R2は記録ユニット3が転写体2にインクを吐出してインク像を形成する形成領域である。吐出後処理領域R3およびR4はインクの吐出後にインク像に対する処理を行う処理領域であり、吐出後処理領域R3は周辺ユニット5Bによる処理が行われる領域であり、吐出後処理領域R4は周辺ユニット5Cによる処理が行われる領域である。転写領域R5は転写ユニット4により転写体2上のインク像が記録媒体Pに転写される転写動作が行われる領域である。転写後処理領域R6は、転写後に転写体2に対する後処理を行う領域であり、周辺ユニット5Dによる処理が行われる領域である。
本実施形態の場合、吐出領域R2は、一定の区間を有する領域である。他の領域R1、R3〜R6は、吐出領域R2に比べるとその区間は狭い。時計の文字盤に喩えると、本実施形態の場合、吐出前処理領域R1は概ね10時の位置であり、吐出領域R2は概ね11時から1時の範囲であり、吐出後処理領域R3は概ね2時の位置であり、吐出後処理領域R4は概ね4時の位置である。転写領域R5は概ね6時の位置であり、転写後処理領域R6は概ね8時の領域である。
転写体2は、単層から構成してもよいが、複数層の積層体としてもよい。複数層で構成する場合、例えば、表面層、弾性層、圧縮層の三層を含んでもよい。表面層はインク像が形成される画像形成面を有する最外層である。圧縮層を設けることで、圧縮層が変形を吸収し、局所的な圧力変動に対してその変動を分散し、高速記録時においても転写性を維持することができる。弾性層は表面層と圧縮層との間の層である。
表面層の材料としては、樹脂、セラミック等各種材料を適宜用いることができるが、耐久性等の点で圧縮弾性率の高い材料を用いることができる。具体的には、アクリル樹脂、アクリルシリコーン樹脂、フッ素含有樹脂、加水分解性有機ケイ素化合物を縮合して得られる縮合物等が挙げられる。表面層には、反応液の濡れ性、画像の転写性等を向上させるために、表面処理を施して用いてもよい。表面処理としては、フレーム処理、コロナ処理、プラズマ処理、研磨処理、粗化処理、活性エネルギー線照射処理、オゾン処理、界面活性剤処理、シランカップリング処理などが挙げられる。これらを複数組み合わせてもよい。また、表面層に任意の表面形状を設けることもできる。
圧縮層の材料としては、例えばアクリロニトリル−ブタジエンゴム、アクリルゴム、クロロプレンゴム、ウレタンゴム、シリコーンゴム等が挙げられる。このようなゴム材料の成形時には、所定量の加硫剤、加硫促進剤等を配合し、さらに発泡剤、中空微粒子或いは食塩等の充填剤を必要に応じて配合し、多孔質のゴム材料としてもよい。これにより、様々な圧力変動に対して気泡部分が体積変化を伴って圧縮されるため、圧縮方向以外への変形が小さく、より安定した転写性、耐久性を得ることができる。多孔質のゴム材料としては、各気孔が互いに連続した連続気孔構造のものと、各気孔がそれぞれ独立した独立気孔構造のものがあるが、いずれの構造であってもよく、これらの構造を併用してもよい。
弾性層の部材としては、樹脂、セラミック等、各種材料を適宜用いることができる。加工特性等の点で、各種エラストマー材料、ゴム材料を用いることができる。具体的には、例えばフルオロシリコーンゴム、フェニルシリコーンゴム、フッ素ゴム、クロロプレンゴム、ウレタンゴム、ニトリルゴム等が挙げられる。また、エチレンプロピレンゴム、天然ゴム、スチレンゴム、イソプレンゴム、ブタジエンゴム、エチレン/プロピレン/ブタジエンのコポリマー、ニトリルブタジエンゴム等が挙げられる。特に、シリコーンゴム、フルオロシリコーンゴム、フェニルシリコーンゴムは、圧縮永久ひずみが小さいため、寸法安定性、耐久性の面で有利である。また、温度による弾性率の変化が小さく、転写性の点でも有利である。
表面層と弾性層の間、弾性層と圧縮層の間には、これらを固定するために各種接着剤や両面テープを用いることもできる。また、転写体2は、転写ドラム41に装着する際の横伸びの抑制や、コシを保つために圧縮弾性率が高い補強層を含んでもよい。また、織布を補強層としてもよい。転写体2は前記材質による各層を任意に組み合わせて作製することができる。
圧胴42は、その外周面が転写体2に圧接される。圧胴42の外周面には、記録媒体Pの先端部を保持するグリップ機構が少なくとも一つ設けられている。グリップ機構は圧胴42の周方向に離間して複数設けてもよい。記録媒体Pは圧胴42の外周面に密接して搬送されつつ、圧胴42と転写体2とのニップ部を通過するときに、転写体2上のインク像が転写される。
転写ドラム41と圧胴42とを回転駆動するモータ等の駆動源は、これらに共通とし、歯車機構等の伝達機構により、駆動力を分配することができる。
<周辺ユニット>
周辺ユニット5A〜5Dは転写ドラム41の周囲に配置されている。本実施形態の場合、周辺ユニット5A〜5Dは、順に、付与ユニット、吸収ユニット、加熱ユニット、清掃ユニットである。
周辺ユニット5A〜5Dは転写ドラム41の周囲に配置されている。本実施形態の場合、周辺ユニット5A〜5Dは、順に、付与ユニット、吸収ユニット、加熱ユニット、清掃ユニットである。
付与ユニット5Aは、記録ユニット3によるインクの吐出前に、転写体2上に反応液を付与する機構である。反応液は、インクを高粘度化する成分を含有する液体である。ここで、インクの高粘度化とは、インクを構成している色材や樹脂等がインクを高粘度化する成分と接触することによって化学的に反応し、あるいは物理的に吸着し、これによってインクの粘度の上昇が認められることである。このインクの高粘度化には、インク全体の粘度上昇が認められる場合のみならず、色材や樹脂等のインクを構成する成分の一部が凝集することにより局所的に粘度の上昇が生じる場合も含まれる。
インクを高粘度化する成分は、金属イオン、高分子凝集剤など、特に制限はないが、インクのpH変化を引き起こして、インク中の色材を凝集させる物質を用いることができ、有機酸を用いることができる。反応液の付与機構としては、例えば、ローラ、記録ヘッド、ダイコーティング装置(ダイコータ)、ブレードコーティング装置(ブレードコータ)などが挙げられる。転写体2に対するインクの吐出前に反応液を転写体2に付与しておくと、転写体2に達したインクを直ちに定着させることができる。これにより、隣接するインク同士が混ざり合うブリーディングを抑制することができる。
吸収ユニット5Bは、転写動作前に、転写体2上のインク像から液体成分を吸収する機構である。インク像の液体成分を減少させることで、記録媒体Pに記録される画像のにじみ等を抑制することができる。液体成分の減少を異なる視点で説明すれば、転写体2上のインク像を構成するインクを濃縮すると表現することもできる。インクを濃縮するとは、インクに含まれる液体成分が減少することによって、インクに含まれる色材や樹脂といった固形分の液体成分に対する含有割合が増加することを意味する。
吸収ユニット5Bは、例えば、インク像に接触してインク像の液体成分の量を減少させる液吸収部材を含む。インク像の保護の点で、液吸収部材の移動速度を転写体2の周速度と同じにして液吸収部材を転写体2と同期して移動させることができる。
液吸収部材は、インク像に接触する多孔質体を含んでもよい。液吸収部材へのインク固形分付着を抑制するため、インク像に接触する面の多孔質体の孔径は、10μm以下であってもよい。ここで、孔径とは平均直径のことを示し、公知の手段、例えば水銀圧入法や、窒素吸着法、SEM画像観察等で測定可能である。なお、液体成分は、一定の形を有さず、流動性があり、ほぼ一定の体積を有するものであれば、特に限定されるものではない。例えば、インクや反応液に含まれる水や有機溶媒等が液体成分として挙げられる 。
加熱ユニット5Cは、転写動作前に、転写体2上のインク像を加熱する機構である。インク像を加熱することで、インク像中の樹脂が溶融し、記録媒体Pへの転写性を向上する。加熱温度は、樹脂の最低造膜温度(MFT)以上とすることができる。MFTは一般的に知られている手法、例えばJIS K 6828−2:2003や、ISO2115:1996に準拠した各装置で測定することが可能である。転写性及び画像の堅牢性の観点から、MFTよりも10℃以上高い温度で加熱してもよく、更に、20℃以上高い温度で加熱してもよい。加熱ユニット5Cは、例えば、赤外線等の各種ランプ、温風ファン等、公知の加熱デバイスを用いることができる。加熱効率の点で、赤外線ヒータを用いることができる。
清掃ユニット5Dは、転写後に転写体2上を清掃する機構である。清掃ユニット5Dは、転写体2上に残留したインクや、転写体2上のごみ等を除去する。清掃ユニット5Dは、例えば、多孔質部材を転写体2に接触させる方式、ブラシで転写体2の表面を擦る方式、ブレードで転写体2の表面をかきとる方式等の公知の方式を適宜用いることができる。また、清掃に用いる清掃部材は、ローラ形状、ウェブ形状等、公知の形状を用いることができる。
以上の通り、本実施形態では、付与ユニット5A、吸収ユニット5B、加熱ユニット5C、清掃ユニット5Dを周辺ユニットとして備えるが、これらの一部のユニットに転写体2の冷却機能を付与するか、あるいは、冷却ユニットを追加してもよい。本実施形態では、加熱ユニット5Cの熱により転写体2の温度が上昇する場合がある。記録ユニット3により転写体2にインクを吐出した後、インク像がインクの主溶剤である水の沸点を超えると、吸収ユニット5Bによる液体成分の吸収性能が低下する場合がある。吐出されたインクが水の沸点未満に維持されるように転写体2を冷却することで、液体成分の吸収性能を維持することができる。
冷却ユニットは、転写体2に送風する送風機構や、転写体2に部材(例えばローラ)を接触させ、この部材を空冷または水冷で冷却する機構であってもよい。また、清掃ユニット5Dの清掃部材を冷却する機構であってもよい。冷却タイミングは、転写後、反応液の付与前までの期間であってもよい。
<供給ユニット>
供給ユニット6は、記録ユニット3の各記録ヘッド30にインクを供給する機構である。供給ユニット6は記録システム1の後部側に設けられていてもよい。供給ユニット6は、インクの種類毎に、インクを貯留する貯留部TKを備える。貯留部TKは、メインタンクとサブタンクとによって構成されてもよい。各貯留部TKと各記録ヘッド30とは流路6aで連通し、貯留部TKから記録ヘッド30へインクが供給される。流路6aは、貯留部TKと記録ヘッド30との間でインクを循環させる流路であってもよく、供給ユニット6はインクを循環させるポンプ等を備えてもよい。流路6aの途中または貯留部TKには、インク中の気泡を脱気する脱気機構を設けてもよい。流路6aの途中または貯留部TKには、インクの液圧と大気圧との調整を行うバルブを設けてもよい。貯留部TK内のインク液面が、記録ヘッド30のインク吐出面よりも低い位置となるように、貯留部TKと記録ヘッド30のZ方向の高さが設計されてもよい。
供給ユニット6は、記録ユニット3の各記録ヘッド30にインクを供給する機構である。供給ユニット6は記録システム1の後部側に設けられていてもよい。供給ユニット6は、インクの種類毎に、インクを貯留する貯留部TKを備える。貯留部TKは、メインタンクとサブタンクとによって構成されてもよい。各貯留部TKと各記録ヘッド30とは流路6aで連通し、貯留部TKから記録ヘッド30へインクが供給される。流路6aは、貯留部TKと記録ヘッド30との間でインクを循環させる流路であってもよく、供給ユニット6はインクを循環させるポンプ等を備えてもよい。流路6aの途中または貯留部TKには、インク中の気泡を脱気する脱気機構を設けてもよい。流路6aの途中または貯留部TKには、インクの液圧と大気圧との調整を行うバルブを設けてもよい。貯留部TK内のインク液面が、記録ヘッド30のインク吐出面よりも低い位置となるように、貯留部TKと記録ヘッド30のZ方向の高さが設計されてもよい。
<搬送装置>
搬送装置1Bは、記録媒体Pを転写ユニット4へ給送し、インク像が転写された記録物P’を転写ユニット4から排出する装置である。搬送装置1Bは、給送ユニット7、複数の搬送胴8、8a、二つのスプロケット8b、チェーン8cおよび回収ユニット8dを含む。図1において、搬送装置1Bの各構成の図形の内側の矢印はその構成の回転方向を示し、外側の矢印は記録媒体Pまたは記録物P’の搬送経路を示している。記録媒体Pは給送ユニット7から転写ユニット4へ搬送され、記録物P’は転写ユニット4から回収ユニット8dへ搬送される。給送ユニット7側を搬送方向で上流側と呼び、回収ユニット8d側を下流側と呼ぶ場合がある。
搬送装置1Bは、記録媒体Pを転写ユニット4へ給送し、インク像が転写された記録物P’を転写ユニット4から排出する装置である。搬送装置1Bは、給送ユニット7、複数の搬送胴8、8a、二つのスプロケット8b、チェーン8cおよび回収ユニット8dを含む。図1において、搬送装置1Bの各構成の図形の内側の矢印はその構成の回転方向を示し、外側の矢印は記録媒体Pまたは記録物P’の搬送経路を示している。記録媒体Pは給送ユニット7から転写ユニット4へ搬送され、記録物P’は転写ユニット4から回収ユニット8dへ搬送される。給送ユニット7側を搬送方向で上流側と呼び、回収ユニット8d側を下流側と呼ぶ場合がある。
給送ユニット7は、複数の記録媒体Pが積載される積載部を含むと共に、積載部から一枚ずつ記録媒体Pを、最上流の搬送胴8に給送する給送機構を含む。各搬送胴8、8aはY方向の回転軸周りに回転する回転体であり、円筒形状の外周面を有している。各搬送胴8、8aの外周面には、記録媒体P(または記録物P’)の先端部を保持するグリップ機構が少なくとも一つ設けられている。各グリップ機構は、隣接する搬送胴間で記録媒体Pを受け渡されるように、その把持動作および解除動作が制御される。
二つの搬送胴8aは、記録媒体Pの反転用の搬送胴である。記録媒体Pを両面記録する場合、表面への転写後に、圧胴42から下流側に隣接する搬送胴8へ記録媒体Pを渡さずに、搬送胴8aに渡す。記録媒体Pは、二つの搬送胴8aを経由して表裏が反転され、圧胴42の上流側の搬送胴8を経由して再び圧胴42へ渡される。これにより、記録媒体Pの裏面が転写ドラム41に面することになり、裏面にインク像が転写される。
チェーン8cは、二つのスプロケット8b間に巻き回されている。二つのスプロケット8bの一方は駆動スプロケットであり他方は従動スプロケットである。駆動スプロケットの回転によりチェーン8cが循環的に走行する。チェーン8cには、その長手方向に離間して複数のグリップ機構が設けられている。グリップ機構は、記録物P’の端部を把持する。下流端に位置する搬送胴8からチェーン8cのグリップ機構に記録物P’が渡され、グリップ機構に把持された記録物P’はチェーン8cの走行により回収ユニット8dへ搬送され、把持が解除される。これにより記録物P’が回収ユニット8d内に積載される。
<後処理ユニット>
搬送装置1Bには、後処理ユニット10A、10Bが設けられている。後処理ユニット10A、10Bは転写ユニット4よりも下流側に配置され、記録物P’に対して後処理を行う機構である。後処理ユニット10Aは、記録物P’の表面に対する処理を行い、後処理ユニット10Bは、記録物P’の裏面に対する処理を行う。処理の内容としては、例えば、記録物P’の画像記録面に、画像の保護や艶出し等を目的としたコーティングを挙げることができる。コーティングの内容としては、例えば、液体の塗布、シートの溶着、ラミネート等を挙げることができる。
搬送装置1Bには、後処理ユニット10A、10Bが設けられている。後処理ユニット10A、10Bは転写ユニット4よりも下流側に配置され、記録物P’に対して後処理を行う機構である。後処理ユニット10Aは、記録物P’の表面に対する処理を行い、後処理ユニット10Bは、記録物P’の裏面に対する処理を行う。処理の内容としては、例えば、記録物P’の画像記録面に、画像の保護や艶出し等を目的としたコーティングを挙げることができる。コーティングの内容としては、例えば、液体の塗布、シートの溶着、ラミネート等を挙げることができる。
<検査ユニット>
搬送装置1Bには、検査ユニット9A、9Bが設けられている。検査ユニット9A、9Bは転写ユニット4よりも下流側に配置され、記録物P’の検査を行う機構である。
搬送装置1Bには、検査ユニット9A、9Bが設けられている。検査ユニット9A、9Bは転写ユニット4よりも下流側に配置され、記録物P’の検査を行う機構である。
本実施形態の場合、検査ユニット9Aは、記録物P’に記録された画像を撮影する撮影装置であり、例えば、CCDセンサやCMOSセンサ等の撮像素子を含む。検査ユニット9Aは、連続的に行われる記録動作中に、記録画像を撮影する。検査ユニット9Aが撮影した画像に基づいて、記録画像の色味などの経時変化を確認し、画像データあるいは記録データの補正の可否を判断することができる。本実施形態の場合、検査ユニット9Aは、圧胴42の外周面に撮像範囲が設定されており、転写直後の記録画像を部分的に撮影可能に配置されている。検査ユニット9Aにより全ての記録画像の検査を行ってもよいし、所定数毎に検査を行ってもよい。
本実施形態の場合、検査ユニット9Bも、記録物P’に記録された画像を撮影する撮影装置であり、例えば、CCDセンサやCMOSセンサ等の撮像素子を含む。検査ユニット9Bは、テスト記録動作において記録画像を撮影する。検査ユニット9Bは、記録画像の全体を撮影し、検査ユニット9Bが撮影した画像に基づいて、記録データに関する各種の補正の基本設定を行うことができる。本実施形態の場合、チェーン8cで搬送される記録物P’を撮影する位置に配置されている。検査ユニット9Bにより記録画像を撮影する場合、チェーン8cの走行を一時的に停止して、その全体を撮影する。検査ユニット9Bは、記録物P’上を走査するスキャナであってもよい。
<制御ユニット>
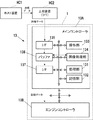
次に、記録システム1の制御ユニットについて説明する。図4および図5は記録システム1の制御ユニット13のブロック図である。制御ユニット13は、上位装置(DFE)HC2に通信可能に接続され、また、上位装置HC2はホスト装置HC1に通信可能に接続される。
次に、記録システム1の制御ユニットについて説明する。図4および図5は記録システム1の制御ユニット13のブロック図である。制御ユニット13は、上位装置(DFE)HC2に通信可能に接続され、また、上位装置HC2はホスト装置HC1に通信可能に接続される。
ホスト装置HC1では、記録画像の元になる原稿データが生成、あるいは保存される。ここでの原稿データは、例えば、文書ファイルや画像ファイル等の電子ファイルの形式で生成される。この原稿データは、上位装置HC2へ送信され、上位装置HC2では、受信した原稿データを制御ユニット13で利用可能なデータ形式(例えば、RGBで画像を表現するRGBデータ)に変換する。変換後のデータは、画像データとして上位装置HC2から制御ユニット13へ送信され、制御ユニット13は受信した画像データに基づき、記録動作を開始する。
本実施形態の場合、制御ユニット13は、メインコントローラ13Aと、エンジンコントローラ13Bとに大別される。メインコントローラ13Aは、処理部131、記憶部132、操作部133、画像処理部134、通信I/F(インタフェース)135、バッファ136および通信I/F137を含む。
処理部131は、CPU等のプロセッサであり、記憶部132に記憶されたプログラムを実行し、メインコントローラ13A全体の制御を行う。記憶部132は、RAM、ROM、ハードディスク、SSD等の記憶デバイスであり、CPU131が実行するプログラムや、データを格納し、また、CPU131にワークエリアを提供する。操作部133は、例えば、タッチパネル、キーボード、マウス等の入力デバイスであり、ユーザの指示を受け付ける。
画像処理部134は例えば画像処理プロセッサを有する電子回路である。バッファ136は、例えば、RAM、ハードディスクやSSDである。通信I/F135は上位装置HC2との通信を行い、通信I/F137はエンジンコントローラ13Bとの通信を行う。図4において破線矢印は、画像データの処理の流れを例示している。上位装置HC2から通信IF135を介して受信された画像データは、バッファ136に蓄積される。画像処理部134はバッファ136から画像データを読み出し、読み出した画像データに所定の画像処理を施して、再びバッファ136に格納する。バッファ136に格納された画像処理後の画像データは、プリントエンジンが用いる記録データとして、通信I/F137からエンジンコントローラ13Bへ送信される。
図5に示すように、エンジンコントローラ13Bは、制御部14、15A〜15Eを含み、記録システム1が備えるセンサ群およびアクチュエータ群16の検知結果の取得および駆動制御を行う。これらの各制御部は、CPU等のプロセッサ、RAMやROM等の記憶デバイス、外部デバイスとのインタフェースを含む。なお、制御部の区分けは一例であり、一部の制御を更に細分化した複数の制御部で実行してもよいし、逆に、複数の制御部を統合して、それらの制御内容を一つの制御部で行うように構成してもよい。
エンジン制御部14は、エンジンコントローラ13Bの全体の制御を行う。記録制御部15Aは、メインコントローラ13Aから受信した記録データをラスタデータ等、記録ヘッド30の駆動に適したデータ形式に変換する。記録制御部15Aは、各記録ヘッド30の吐出制御を行う。
転写制御部15Bは、付与ユニット5Aの制御、吸収ユニット5Bの制御、加熱ユニット5Cの制御、および清掃ユニット5Dの制御を行う。
信頼性制御部15Cは、供給ユニット6の制御、回復ユニット12の制御、および記録ユニット3を吐出位置POS1と回復位置POS3との間で移動させる駆動機構の制御を行う。
搬送制御部15Dは、転写ユニット4の駆動制御や、搬送装置1Bの制御を行う。検査制御部15Eは、検査ユニット9Bの制御、および検査ユニット9Aの制御を行う。
センサ群およびアクチュエータ群16のうち、センサ群には、可動部の位置や速度を検知するセンサ、温度を検知するセンサ、撮像素子等が含まれる。アクチュエータ群にはモータ、電磁ソレノイド、電磁バルブ等が含まれる。
<動作例>
図6は記録動作の例を模式的に示す図である。転写ドラム41および圧胴42が回転されつつ、以下の各工程が循環的に行われる。状態ST1に示すように、始めに転写体2上に付与ユニット5Aから反応液Lが付与される。転写体2上の反応液Lが付与された部位は転写ドラム41の回転に伴って移動していく。反応液Lが付与された部位が記録ヘッド30の下に到達すると、状態ST2に示すように記録ヘッド30から転写体2にインクが吐出される。これによりインク像IMが形成される。その際、吐出されるインクが転写体2上の反応液Lと混ざりあうことで、色材の凝集が促進される。吐出されるインクは、供給ユニット6の貯留部TKから記録ヘッド30に供給される。
図6は記録動作の例を模式的に示す図である。転写ドラム41および圧胴42が回転されつつ、以下の各工程が循環的に行われる。状態ST1に示すように、始めに転写体2上に付与ユニット5Aから反応液Lが付与される。転写体2上の反応液Lが付与された部位は転写ドラム41の回転に伴って移動していく。反応液Lが付与された部位が記録ヘッド30の下に到達すると、状態ST2に示すように記録ヘッド30から転写体2にインクが吐出される。これによりインク像IMが形成される。その際、吐出されるインクが転写体2上の反応液Lと混ざりあうことで、色材の凝集が促進される。吐出されるインクは、供給ユニット6の貯留部TKから記録ヘッド30に供給される。
転写体2上のインク像IMは転写体2の回転に伴って移動していく。インク像IMが吸収ユニット5Bに到達すると状態ST3に示すように吸収ユニット5Bによりインク像IMから液体成分が吸収される。インク像IMが加熱ユニット5Cに到達すると状態ST4に示すように加熱ユニット5Cによりインク像IMが加熱され、インク像IM中の樹脂が溶融し、インク像IMが造膜される。このようなインク像IMの形成に同期して、搬送装置1Bにより記録媒体Pが搬送される。
状態ST5に示すように、インク像IMと記録媒体Pとが転写体2と圧胴42とのニップ部に到達し、記録媒体Pにインク像IMが転写され、記録物P’が製造される。ニップ部を通過すると、記録物P’に記録された画像が検査ユニット9Aにより撮影され、記録画像が検査される。記録物P’は搬送装置1Bにより回収ユニット8dへ搬送される。
転写体2上のインク像IMが形成されていた部分は、清掃ユニット5Dに到達すると状態ST6に示すように清掃ユニット5Dにより清掃される。清掃後、転写体2は一回転したことになり、同様の手順で記録媒体Pへのインク像の転写が繰り返し行われる。上記の説明では理解を容易にするために、転写体2の一回転で一枚の記録媒体Pへのインク像IMの転写が一回行われるように説明したが、転写体2の一回転で複数枚の記録媒体Pへのインク像IMの転写が連続的に行うことができる。
このような記録動作を継続していくと、各記録ヘッド30のメンテナンスが必要となる。図7は各記録ヘッド30のメンテナンスの際の動作例を示している。状態ST11は、吐出位置POS1に記録ユニット3が位置している状態を示す。状態ST12は、記録ユニット3が予備回復位置POS2を通過している状態を示し、通過中に回復ユニット12により記録ユニット3の各記録ヘッド30の吐出性能を回復する処理が実行される。その後、状態ST13に示すように、記録ユニット3が回復位置POS3に位置した状態で、回復ユニット12により各記録ヘッド30の吐出性能を回復する処理が実行される。
<吸収ユニット>
吸収ユニット5Bの具体例について図8を参照して説明する。図8は吸収ユニット5Bの例を示す概要図である。吸収ユニット5Bは転写体2上に形成されたインク像IMを記録媒体Pに転写する前にインク像IMから液体成分を吸収する液吸収装置である。本実施形態のように水性顔料インクを用いる場合、吸収ユニット5Bは主としてインク像の水分を吸収することを目的としている。これにより記録媒体Pにカールやコックリングが生じることを抑制することができる。
吸収ユニット5Bの具体例について図8を参照して説明する。図8は吸収ユニット5Bの例を示す概要図である。吸収ユニット5Bは転写体2上に形成されたインク像IMを記録媒体Pに転写する前にインク像IMから液体成分を吸収する液吸収装置である。本実施形態のように水性顔料インクを用いる場合、吸収ユニット5Bは主としてインク像の水分を吸収することを目的としている。これにより記録媒体Pにカールやコックリングが生じることを抑制することができる。
吸収ユニット5Bは、液吸収部材50と、液吸収部材50を循環的に移動させる駆動ユニット51と、変位ユニット512と、複数種類の回復ユニット52〜54と、前処理ユニット55と、検知ユニット56とを含む。
液吸収部材50はインク像IMから液体成分を吸収する吸収体であり、図8の例では無端ベルトの形態を有する液吸収シートである。液吸収位置Aは、転写体2上のインク像IMから液吸収部材50が液体成分を吸収する位置であり、液吸収部材50が転写体2に最も近接する部位を示している。矢印d1は転写体2の移動方向を、矢印d2は液吸収部材50の移動方向をそれぞれ示している。
液吸収部材50は、液吸収部材50は単層で構成されてもよいが、複数層で構成されてもよい。ここでは表層と裏層との二層構造を例示する。表層はインク像IMに接触する第1の面50aを構成し、裏層は第2の面50bを構成する。転写体2上のインク像IMは液吸収部材50により液体成分が吸収される。インク像IMの液体成分は表層から液吸収部材50に浸透し、更に、裏層へ浸透する。インク像IMは、液体成分が減少した状態となって加熱ユニット5Cへ向かうことになる。
表層および裏層は、いずれも多孔質材料から構成することができ、色材の付着を抑制しつつ液体成分の吸収性能を高めるために、裏層の平均孔径を表層の平均孔径よりも大きくすることで表層から裏層への液体成分の移動を促進することができる。
表層の材料は、例えば、水に対する接触角が90°未満の親水性材料であってもよいし、水に対する接触角が90°以上の撥水性材料であってもよい。親水性材料の場合、水に対する接触角が40°以下の材料であってもよい。接触角は例えばJIS R3257の「6.静的法」に記載の技法に準拠して測定されたものであってもよい。
親水性材料の場合、毛管力により液体を吸い上げる効果がある。親水性材料としては、セルロール、ポリアクリルアミドや、これらの複合材料を挙げることができる。撥水性材料を用いた場合、その表面に親水化処理を施してもよい。親水化処理としてはスパッタエッチング法等の方法を挙げることができる。
撥水性材料としては、例えば、フッ素樹脂を挙げることができる。フッ素樹脂としては、例えば、ポリテトラフルオロエチレン、ポリクロロトリフルオロエチレン、ポリフッ化ビニリデン等を挙げることができる。表層に撥水性材料を用いた場合、液体の吸い上げ効果が発揮されるまでに時間を要する場合があるため、表層との接触角が90°未満である液体を表層にしみ込ませておいてもよい。
裏層の材料としては、例えば、樹脂繊維の不織布や織布を挙げることができる。裏層から表層へ液体成分が逆流しない点で、裏層の材料は表層に対する水の接触角が同等かそれよりも大きいものであってもよい。例えば、ポリオレフィン、ポリウレタン、ナイロンなどのポリアミド、ポリエステル、ポリスルフォンや、これらの複合材料を挙げることができる。
表層と裏層との積層方法としては、例えば、接着剤ラミネートや熱ラミネート等を挙げることができる。
駆動ユニット51は、液吸収位置Aを通過するように液吸収部材50を循環的に回転移動可能に支持する機構であり、駆動回転体510と、複数の従動回転体511b〜511hとを含む。駆動回転体510および従動回転体511は、帯状の液吸収部材50が巻き回されるローラまたはプーリであり、Y方向の軸周りに回転自在に支持される。
駆動回転体510はモータMの駆動力により回転し、液吸収部材50を回転移動させる搬送ローラ等の搬送回転体である。従動回転体511b〜511hは、自由回転自在に支持される。本実施形態の場合、これら駆動回転体510と従動回転体511b〜511hとにより液吸収部材50の回転移動経路が画定される。液吸収部材50の回転移動経路は、回転移動方向(矢印d2)で見て上下に曲折したジグザグ状の経路とされている。これにより、より小さな空間で、より長い液吸収部材50を用いることができ、液吸収部材50の性能劣化に伴う交換頻度をより少なくすることができる。
従動回転体511bには、張力調整機構513が設けられている。張力調整機構513は、液吸収部材50の張力を調整する機構であり、支持部材513aと、移動機構513bと、センサ513cを有する。支持部材513aは、従動回転体511bをY方向の軸周りに回転自在に支持する。移動機構513bは支持部材513aを移動する機構であり、例えば、電動シリンダである。移動機構513bにより従動回転体511bの位置を変位することができ、これにより液吸収部材50の張力を調整する。センサ513cは、液吸収部材50の張力を検知するセンサである。本実施形態の場合、移動機構513bが受ける負荷を検知する。センサ513cの検知結果に基づいて移動機構513bを制御することで、液吸収部材50の張力を自動制御可能である。
変位ユニット512は、液吸収部材50を転写体2と接触する接触状態と転写体2から離間した退避状態との間で変位させる機構である。本実施形態において変位ユニット512は液吸収部材50の一部に作用して、その部分が転写体と接触する状態と転写体から退避した状態とに変位させる。しかし、液吸収部材50を一体として移動させるものであってもよい。
変位ユニット512は、可動部材512aと押圧機構512bとを有する。可動部材512aは転写体2に対向して配置されており、液吸収部材50が摺動する周面を有している。押圧機構512bは可動部材512aを転写体2に対して(転写ドラム2側に)進退させる機構であり、例えば、電動シリンダである。押圧機構512bの駆動により可動部材512aを介して液吸収部材の一部が転写体2へ押圧される。
図9は変位ユニット512の動作説明図である。図9(A)は液吸収部材50が接触状態に変位された状態を示し、図9(B)は液吸収部材50が退避状態に変位された状態を示す。
液吸収部材50が接触状態に変位されたとき、液吸収部材50と転写体2とが液吸収位置Aにおいて接触する。液吸収位置Aにおいて、液吸収部材50は転写体2と可動部材512aとにニップされる。液吸収効率の点で、液吸収部材50は転写体2に圧接されることが有利である。記録動作中、液吸収部材50は駆動ユニット51により、液吸収部材50の回転移動速度が転写体2の周速度と等速(ほぼ等速である場合も含む)になるように制御される。これにより、転写体2或いはインク像IMと液吸収部材50との擦れが防止される。
退避状態は、液吸収部材50が転写体2と離間できる位置であればよく、接触状態と退避状態との距離は小さくてもよい。接触状態と退避状態との間で液吸収部材50の一部が移動する方向、つまり、押圧機構512bの押圧/解除方向は、液吸収位置Aにおける転写体2の接線方向に対して交差する方向であり、例えば、直交方向である。
変位ユニット512を設けて転写体2に対して液吸収部材50を接離自在に構成したことで、転写体2や液吸収部材50のメンテナンス作業やウォームアップを個別に行い易くなる。
図8に戻り、液吸収部材50の回転移動速度あるいは回転移動量は、センサSR1で検知される。センサSR1は例えばロータリエンコーダである。本実施形態の場合、センサSR1の回転体RLが液吸収部材50に接触して液吸収部材50の回転移動に従動して回転し、その回転量を検知する。回転体RLは従動回転体511eに対向して配置されている。液吸収部材50の回転移動速度あるいは回転移動量は、駆動回転体510または従動回転体511b〜511hの回転速度を検知して演算することでも特定可能である。しかしながら、これら回転体に対して、液吸収部材50が滑る場合があるため、液吸収部材50の実際の移動速度と異なる値になってしまうおそれがある。本実施形態のように、センサSR1が直接液吸収部材50の回転移動速度を検知することで、検知精度を向上できる。
回復ユニット(清掃ユニット52、付与ユニット53、回収ユニット54)は、液吸収部材50の液吸収性能を回復する装置である。このような回復機構を設けることで、液吸収部材50の性能劣化を抑制し、液吸収性能を、より長期間維持することができる。これにより液吸収部材50の交換頻度をより少なくすることができる。
本実施形態では、機能が異なる三種類の回復ユニット(清掃ユニット52、付与ユニット53、回収ユニット54)を液吸収部材50の移動経路の途中に配置している。しかし、回復ユニットは一つであってもよい。また、機能が共通する回復ユニットを複数設けてもよい。
清掃ユニット52および付与ユニット53は第1の面50aに対する処理を行い、回収ユニット54は第2の面50bに対する処理を行う。第1の面50aと第2の50bに異なる処理を施すことで、液吸収部材50の液吸収性能をより的確に回復することができる。
清掃ユニット52は、液吸収部材50を清掃する装置である。清掃ユニット52は、清掃ローラ521と、貯留槽522と、支持部材523と、移動機構524とを有する。支持部材523は、清掃ローラ521をY方向の軸周りに回転自在に支持するとともに、貯留槽522を支持する。貯留槽522には清掃液522aが貯留され、清掃ローラ521はその一部が清掃液522aに浸かっている。移動機構524は支持部材523を移動する機構であり、例えば、電動シリンダである。支持部材523が移動すると、清掃ローラ521および貯留槽522も移動する。これらは、清掃ローラ521が液吸収部材50に接触する清掃位置と、清掃ローラ521が液吸収部材50から離間した退避位置との間で矢印d3方向(ここでは上下方向)に移動する。図8は、清掃ローラ521が清掃位置に位置した状態を示している。清掃ローラ521は、記録システム1の運転中は清掃位置に位置する構成とし、メンテナンス時は退避位置に移動する構成としてもよい。
清掃ローラ521は従動回転体511cに対向して配置され、清掃ローラ521が清掃位置に移動すると液吸収部材50が清掃ローラ521と従動回転体511cとでニップされる。清掃ローラ521は液吸収部材50の回転移動に従動して回転する。清掃ローラ521の周面は、例えば、粘着性を有する材料で形成され、液吸収部材50の第1の面50aに接触して第1の面50aに付着したごみ(紙粉等)を除去する。清掃ローラ521の周面の材料としては、例えばブチル、シリコーン、ウレタンなどのゴムを挙げることができる。清掃液522aは例えば界面活性剤であり清掃ローラ521に付着したゴミの分離を促進させる液体を用いることができる。貯留槽522には清掃ローラ521の表面に当接してゴミの分離を促進するワイパを設けてもよい。
本実施形態では、清掃ローラ521によって液吸収部材50の第1の面50aに付着したゴミを除去する構成としたが、エアの吹付けによりゴミを除去する構成等、他の構成も採用可能である。
付与ユニット53は、液吸収部材50に保湿液を付与する装置である。付与ユニット53は、付与ローラ531と、貯留槽532と、支持部材533と、移動機構534とを有する。支持部材533は、付与ローラ531をY方向の軸周りに回転自在に支持するとともに、貯留槽532を支持する。貯留槽532には保湿液532aが貯留され、付与ローラ531はその一部が保湿液532aに浸かっている。移動機構534は支持部材533を移動する機構であり、例えば、電動シリンダである。支持部材533が移動すると、付与ローラ531および貯留槽532も移動する。これらは、付与ローラ531が液吸収部材50に接触する付与位置と、付与ローラ531が液吸収部材50から離間した退避位置との間で矢印d4方向(ここでは上下方向)に移動する。図8は、付与ローラ531が付与位置に位置する状態(回復動作中の状態)を示している。付与ローラ531は、記録システム1の運転中は付与位置に位置させる構成とし、メンテナンス時に退避位置に移動する構成としてもよい。
付与ローラ531は従動回転体511dに対向して配置され、付与ローラ531が付与位置に移動すると液吸収部材50が付与ローラ531と従動回転体511dとでニップされる。付与ローラ531は液吸収部材50の回転移動に従動して回転する。付与ローラ531の周面は、例えば、ゴムで形成され、貯留槽533に貯留された保湿液532aを汲み上げるようにして液吸収部材50の第1の面50aに保湿液532aを供給する。保湿液532aは例えば水である。保湿液532aは水溶性有機溶剤や界面活性剤を含有していてもよい。
液吸収部材50は、その使用により、第1の面50aが増粘する場合があり、これはインク像IMからの液体成分の吸収性能を低下させる場合がある。第1の面50aに保湿液532aを付与することで、第1の面50aが増粘することを抑制し、液体成分の吸収性能を維持することができる。
本実施形態では、付与ローラ531によって液吸収部材50の第1の面50aに保湿液532aを汲み上げる構成としたが、保湿液532aをノズルによって第1の面50aに吹き付ける構成等、他の構成も採用可能である。
回収ユニット54は、液吸収部材50から液体成分を除去する装置である。回収ユニット54は、除去ローラ540と、除去した液体成分を収容する貯留槽541とを有する。
除去ローラ540は従動回転体511fに対向して配置され、除去ローラ540が除去位置に移動すると液吸収部材50が除去ローラ540と従動回転体511fとでニップされる。除去ローラ540は液吸収部材50の回転移動に従動して回転する。除去ローラ540と従動回転体511fとの間に液吸収部材50が挟まれることで、液吸収部材50が吸収した液体成分が絞り出される。その点で従動回転体511fは回収ユニット54の一部を兼用している。
回収ユニット54において、液吸収部材50の第2の面50bが重力方向の下側に位置し、第1の面50aが重力方向の上側に位置している。したがって、第1の面50a側よりも第2の面50b側から液体成分が絞り出されて重力で落下し易い。第2の面50bからの液体成分の除去が促進されることで、裏層に液体成分を吸収するための領域を確保し、液吸収成分50の液体吸収性能を回復することができる。また、付与ユニット53によって保湿液が付与された第1の面50aが乾燥されることを抑制することができる。
以上の通り、本実施形態では、清掃ユニット52、付与ユニット53、回収ユニット54により、液吸収部材50の回転移動方向で上流側から下流側へ向かって、ゴミの除去、保湿、液体成分の除去という処理順序で回復処理が行われる構成となっている。処理順序はこれに限られないが、本実施形態の処理順序によれば、清掃ユニット52による第1の面50aの清掃後に付与ユニット53による第1の面50aの保湿が行われるので、ゴミの除去と保湿性向上とを促進することができる。また、回収ユニット54による液体成分の除去を相対的に下流側で行うことで、第2の面50bが重力方向で高い位置を移動している場所において液体成分の除去を行うことができる。これは、除去された液体成分を重力を利用して回収し易いという利点がある。
次に、前処理ユニット55について説明する。前処理ユニット55は、主に、記録システム1の運転開始時等に、液吸収部材50に短時間で液吸収性能を発揮させるための前処理を行う装置である。本実施形態の場合、液吸収部材50の第1の面50aに前処理液を付与して、液吸収性能の立ち上がりを向上する。前処理液は、例えば、表層501を撥水性材料で構成した場合、界面活性剤を用いることができる。界面活性剤としては、フッ素系界面活性剤のF―444(商品名、DIC社製)、ZonylFS3100(商品名、デュポン社製)、CapstoneFS-3100(商品名、The Chemours CompanyLLC製)やシリコーン系界面活性剤のBYK349(商品名、BYK社製)等が挙げられる。
前処理ユニット55は、付与ローラ551と、貯留槽552と、支持部材553と、移動機構554とを有する。支持部材553は、付与ローラ551をY方向の軸周りに回転自在に支持するとともに、貯留槽552を支持する。貯留槽552には前処理液552aが貯留され、付与ローラ551はその一部が前処理液552aに浸かっている。移動機構554は支持部材553を移動する機構であり、例えば、電動シリンダである。支持部材553が移動すると付与ローラ551および貯留槽552も移動する。これらは、付与ローラ551が液吸収部材50に接触する付与位置と、付与ローラ551が液吸収部材50から離間した退避位置との間で矢印d5方向(ここでは横方向)に移動する。図8は、付与ローラ551が退避位置に位置する状態を示している。付与ローラ551は、記録システム1の運転開始時や、定期的に(例えば記録媒体Pの処理枚数単位で)付与位置に移動することができる。
付与ローラ551は従動回転体511eに対向して配置され、付与ローラ551が付与位置に移動すると液吸収部材50が付与ローラ551と従動回転体511eとでニップされる。付与ローラ551は液吸収部材50の回転移動に従動して回転する。付与ローラ551の周面は、例えば、ゴムで形成され、貯留槽553に貯留された前処理液552aを汲み上げるようにして液吸収部材50の第1の面50aに供給する。
このような構成により、吸収ユニット5Bは、液吸収部材50により転写体2上のインク像IMから液体成分を吸収する。液吸収部材50の循環的な回転移動と並行して液体成分を吸収することで連続的にインク像IMから液体成分を吸収可能である。しかも、清掃ユニット52、付与ユニット53、回収ユニット54を設けたことにより、液吸収部材50の液吸収性能をより長期間に渡って維持することができ、液吸収部材50の交換サイクルをより長くすることができる。
検知ユニット56は、液吸収部材50の移動経路上の所定の位置において液吸収部材50の所定の部位の通過を検知するセンサである。検知ユニット56がマーカを検知したことを起点として、センサSR1の検知結果を参照することにより、液吸収部材50のどの部位が、液吸収部材50の移動経路上のどの位置に位置しているかを認識することができる。検知ユニット56は、本実施形態の場合、液吸収位置Aに比較的近い位置に配置されている。検知ユニット56の位置は、液吸収位置Aを始点および終点とした液吸収部材50の移動経路一周の中で、中間地点よりも終点側の位置、若しくは、中間地点と終点との間の中間地点よりも終点側の位置とすることができる。
本実施形態の場合、検知ユニット56は、所定の部位として液吸収部材50の連結部位を検知する。図10(A)はその説明図である。液吸収部材50は本実施形態の場合、シート材料の両端部を連結して無端ベルトに形成されている。図10(A)はその連結部位50cを示している。本実施形態の場合、連結部位50cの位置を示すマーカ50dが液吸収部材50の第2の面50bに設けられている。検知ユニット56は連結部位50cを識別するセンサであってもよいが、本実施形態では、マーカ50dを検知することにより連結部位50cを検知する。マーカ50dは例えば液吸収部材50の他の部位と色が異なるマーカ(例えば液吸収部材50が白でマーカ50dは黒)であり、検知ユニット56は例えば反射式の光センサである。マーカ50dの位置は第2の面50bに限られず、例えば、第1の面50aでもよい。マーカ50dを第2の面50bに設けることで、インク像IMとマーカ50dとの接触を回避できる。
本実施形態の場合、マーカ50dは連結部位50c上に形成されているが、連結部位50cと一定の位置関係が既知であれば、例えば、図10(B)に示すように連結部位50cから離れた位置に形成してもよい。
連結部位50cは、液吸収部材50の他の部位と液吸収面(第1の面50a)の特性が異なる場合がある。連結部位50cがインク像IMと接触すると、液吸収性能が他の部位よりも劣る場合がある。また、連結部位50cと他の部位とが同時にインク像IMと接触すると、インク像IM中に液体成分の残留具合が異なる部位が生じる場合がある。検知ユニット56でマーカ50dを検知し、連結部位50cの位置を特定することで、液吸収位置Aを連結部位50cが通過するタイミングをコントロールすることができる。
<転写部の構成>
図11(A)は転写ドラム41および転写体2の構成例を示す。図11(A)の例の転写ドラム41は、円筒形状の外周面を有し、回転軸周りに等角度ピッチ(図の例では90度ピッチ)で凹部41aが形成されている。凹部41aは、転写体2の端部を掴むグリッパが配置される空間である。図11(A)の例では、4つの転写体2(換言すれば4つのセグメント)が転写ドラム41の外周面に周方向に間欠的に保持されている。この構成の場合、4つの転写体2の表面領域が転写部TR1〜TR4(総称するときはTRとする。)を形成する。各転写部上にはインク像IMが形成される。各転写部TRは一枚の記録媒体Pに対応する。換言すると、転写ドラム41の一回転で最大4枚の記録媒体Pに対するインク像IMの転写が可能な構成となっている。
図11(A)は転写ドラム41および転写体2の構成例を示す。図11(A)の例の転写ドラム41は、円筒形状の外周面を有し、回転軸周りに等角度ピッチ(図の例では90度ピッチ)で凹部41aが形成されている。凹部41aは、転写体2の端部を掴むグリッパが配置される空間である。図11(A)の例では、4つの転写体2(換言すれば4つのセグメント)が転写ドラム41の外周面に周方向に間欠的に保持されている。この構成の場合、4つの転写体2の表面領域が転写部TR1〜TR4(総称するときはTRとする。)を形成する。各転写部上にはインク像IMが形成される。各転写部TRは一枚の記録媒体Pに対応する。換言すると、転写ドラム41の一回転で最大4枚の記録媒体Pに対するインク像IMの転写が可能な構成となっている。
隣接する転写部間には、非転写部NR1〜NR4(総称するときはNRとする。)が形成されている。本実施形態では凹部41aが非転写部NRを構成しており、隣接する転写部TR間の隙間である。非転写部NRはインク像IMを形成しない領域である。転写ドラム41を回転することにより、液吸収位置Aには、転写部TR1→非転写部NR1→転写部TR2→非転写部NR2...と、転写部TRと非転写部NRとが循環的に移動されることになる。
センサSR2は転写ドラム41の回転量を検知するセンサであり、例えばロータリエンコーダやリニアエンコーダ等である。具体的な構成として、例えば、転写ドラム41の側面に周方向に設けられたエンコーダスケールと、このエンコーダスケールを読み取る光学センサとを備えたセンサであってもよい。この構成によれば、転写ドラム41の絶対的な位相を検知することができる。
センサSR2により転写ドラム41の位相を検知することで、各転写部TRおよび非転写部NRの位置が認識される。これにより、液吸収位置Aを転写部TRまたは非転写部NRが通過するタイミングが認識される。
<転写部と液吸収部材の周長及び対応領域の組合せ>
本実施形態の場合、液吸収部材50の周長を、転写体2の表面の周長(換言すると転写部が移動する円軌道の周長)の整数倍または整数の逆数倍としている。図10(C)はその説明図である。周長PRLは、転写ドラム41の回転中心から転写体2の表面までの半径rを有する仮想円の周長である。周長TTLは、液吸収部材50の表面50aの周長である。周長TTL=整数×周長PRL、または周長TTL=1/整数×周長PRLとし、転写部TRの周速度と、液吸収部材50の移動速度(走行速度)を等速で制御すると、液吸収位置Aにおいて、連結部位50cと対向する転写体2側の部位は、毎度、同じになる。
本実施形態の場合、液吸収部材50の周長を、転写体2の表面の周長(換言すると転写部が移動する円軌道の周長)の整数倍または整数の逆数倍としている。図10(C)はその説明図である。周長PRLは、転写ドラム41の回転中心から転写体2の表面までの半径rを有する仮想円の周長である。周長TTLは、液吸収部材50の表面50aの周長である。周長TTL=整数×周長PRL、または周長TTL=1/整数×周長PRLとし、転写部TRの周速度と、液吸収部材50の移動速度(走行速度)を等速で制御すると、液吸収位置Aにおいて、連結部位50cと対向する転写体2側の部位は、毎度、同じになる。
こうした構造によって、転写部TRと液吸収部材50上の液吸収領域との組合せに規則性を持たせることができる。図12(A)は液吸収部材50上の領域の例を示している。ここでは、周長TTL=周長PRL(1倍)とした場合を想定している。液吸収領域LP1〜LP4(総称する場合はLPという。)は転写部TR1〜TR4に対応している。換言すると、液吸収位置Aにおいて、液吸収領域LP1は転写部TR1と接触し、液吸収領域LP2は転写部TR2と接触する。同様に、液吸収領域LP3は転写部TR4と接触し、液吸収領域LP4は転写部TR4と接触する。周長TTL=周長PRLとしたことで、転写部TRの周速度と液吸収部材50の移動速度が等速で制御される場合、この対応関係を維持することができる。
なお、領域NP1〜4も非転写部NR1〜NR4に対応している。連結部位50cが非転写部NR4に対応する領域に配置されているため、連結部位50cとインク像IMとの接触を回避することができる。
転写部TRと、対応する液吸収部材50の液吸収領域(接触領域)との組合せは記録画像の品質に影響を与える。例えば、転写部TR1と液吸収領域LP1とが液吸収位置Aにおいて接触する構成と、転写部TR1と液吸収領域LP2とが液吸収位置Aにおいて接触する構成と、では転写部TR1から記録媒体に転写されたインク像IMの画像の品質(例えば濃度)が異なる場合がある。
その要因としては、転写部TR間の表面状態のバラつき、液吸収部材50の部位による表面状態のバラつき等があげられる。こうしたバラつきにより、転写部TRに対する反応液の付与度合や、液吸収部材50における液体成分やインクの吸収量に差が生じる場合がある。これは記録媒体に転写されるインク像IMの性状に影響を与え、したがって、記録媒体に記録される画像の品質がバラつく要因となる。
こうした画像の品質のバラつきは、例えば、記録データを個別に補正することで解消可能である。しかし、転写部TRに対して、液吸収部材50の液吸収領域がランダムに変化する装置構成であると、補正データを準備することができないか、組合せが多くなり過ぎて補正データの数が膨大になる。
本実施形態では、転写部TRと液吸収部材50上の領域との組合せが規則性を有するので、組合せ毎に補正データを準備すれば品質のバラつきを低減でき、また、組合せの数も少なくて足りる。図12(B)は転写部TR1〜TR4と液吸収領域LP1〜LP4との組合せ並びにその補正データの例を示している。同図の例は、組合せの数は転写部TRの数(4つ)であり、補正データも組合せ毎に一つずつ、合計で4つとされている。
制御上の転写部TR1〜TR4の範囲は、センサSR2で検出される転写ドラム41の位相で定義することができる。また、制御上の液吸収領域LP1〜LP4の範囲は、検知ユニット56に検知されるマーカ50cの位置を原点としてセンサSR1で検出される液吸収部材50の移動量で定義することができる。
図12(B)の例における補正データは、画像全体の濃度に関する補正値であるが、他の種類の補正データであってもよいし、複数種類の補正データのセットであってもよい。また、画像の一部の補正データであってもよいし、画像の全体と一部の補正データの双方が含まれていてもよい。
図12(C)は、周長TTL=2×周長PRLとした場合の例を示している。この周長の関係にある場合、転写ドラム41が2回転で、液吸収部材50が1周する。つまり、液吸収部材50には、液吸収領域が8か所(LP1〜LP8)存在する構成である。一つの転写部TRに対し、2か所の液吸収領域が対応する。組み合わせの数は8となり、補正データも8つとなる。周長TTLが周長PRLの3倍以上の場合も同様に組合せを設定できる。
<液吸収部材の変位制御>
本実施形態では、変位ユニット512によって転写体2に対して液吸収部材50を接触・離間させることが可能である。退避状態から接触状態へ液吸収部材50を再変位させる際、転写部TRと液吸収領域LPとの組合せが維持されるように制御する。
本実施形態では、変位ユニット512によって転写体2に対して液吸収部材50を接触・離間させることが可能である。退避状態から接触状態へ液吸収部材50を再変位させる際、転写部TRと液吸収領域LPとの組合せが維持されるように制御する。
図13(A)〜図13(C)は液吸収部材50を退避状態から接触状態へ変位させる制御例を図示している。ここでは図12(B)の例の組合せを維持する場合を例示する。
液吸収部材50を変位させる場合、転写ドラム41及び液吸収部材50は停止していてもよい。しかし、記録システム1の始動後に液吸収部材50を退避状態に変位させる必要性が生じた場合、転写ドラム41及び液吸収部材50をその都度停止させると、再始動に時間がかかる場合がある。そこで、同図の例では転写ドラム41を回転させ、かつ、液吸収部材50を回転移動させた状態で変位させる例を示している。
図13(A)は液吸収部材50が退避している状態を示している。転写ドラム41はd1方向に回転し、液吸収部材50はd2方向に回転移動している。転写部TRの周速度と、液吸収部材50の回転移動速度が等速となるように転写ドラム41の回転及び液吸収部材50の回転移動を制御する。
センサSR2の検知結果によって転写ドラム41の位相が監視され、検知ユニット56及びセンサSR1の検知結果によって液吸収部材50の位置が監視される。非転写部NR及び対応する領域NP(図13(A)〜(C)では非転写部NR1と領域NP1)が液吸収位置Aに到達するタイミングで、液吸収部材50を接触状態へ変位させる。
図13(C)は図13(B)の状態から転写ドラム41の回転が進行し、転写部TR2と液吸収領域LP2とが接触している状態を示す。こうして、液吸収部材50の変位の前後で、転写部TRと液吸収領域LPとの組合せを同じに維持することができる。
なお、図11(A)の例では、転写体2の設置個所以外の部位を非転写部としたが、転写体2の一部を非転写部として利用してもよい。図11(B)はその一例を示す。同図の例では、転写体2が転写ドラム41の外周面に周方向に連続的に全周に渡って設けられている。したがって、転写ドラム41の外周全体を転写部とすることが可能であるが、同図の例のように、その一部を非転写部NRとして利用してもよい。
上述した液吸収部材50の変位制御の処理例について説明する。吸収ユニット5Bや転写ユニット4は転写制御部15Bが制御する。図14は転写制御部15Bが実行する処理例を示しており、液吸収部材50が退避位置に位置している状態で実行される。
S1では検知ユニット56及びセンサSR1並びにセンサSR2の検知結果を取得し、転写部TR及び液吸収部材50の位置を認識する。S2ではS1の検知結果に基づいて、液吸収位置Aにおいて転写部TRと、対応する液吸収領域LPとが接触するように、転写部TR及び液吸収部材50の位置を調整しつつ、液吸収部材50及び転写部TRの速度が等速になるように制御する。転写部TRと、対応する液吸収領域LPとの相対位置が、使用に伴ってずれる場合があるが、S2の処理においてこのずれも較正(補正)することができる。
S3では液吸収部材50の変位タイミングか否かを判定する。液吸収部材50の変位タイミングは、液吸収位置Aに非転写部NRと、対応する領域NPとが到達するタイミングとすることで、変位時に転写部TRに当接の衝撃が作用することを回避できる。
S3で変位タイミングであると判定するとS4へ進み、押圧機構512bを駆動して液吸収部材50を接触状態へ変位する。液吸収位置Aにおいて接触する転写部TRと、対応する液吸収領域LPとの組合せが維持される。以上により一回の処理が終了する。その後、記録動作が開始される。
<補正データの設定及び記録データの補正>
図12(B)及び図12(C)に例示した補正データの設定例及び記録データの補正について説明する。補正データの設定に関わる処理はメインコントローラ13Aが実行することができ、記録データの補正に関わる処理はエンジン制御部14が行うことができる。
図12(B)及び図12(C)に例示した補正データの設定例及び記録データの補正について説明する。補正データの設定に関わる処理はメインコントローラ13Aが実行することができ、記録データの補正に関わる処理はエンジン制御部14が行うことができる。
補正データの設定は、転写部TRと液吸収領域NPとの組合せ毎にテスト画像の記録を行い、その記録結果に基づき行う。テスト画像は組合せ毎に同じ画像とすることができる。テスト画像は、例えば、記録媒体の全面に特定のインク(例えばブラック)を特定のデューティー比(例えば50%)でべた塗りする画像(ベタ画像)とすることができる。無論、複数種類のインクを使用したテスト画像や、べた塗りではないテスト画像なども採用可能である。こうしたテスト画像により、画像のムラを特定することができる。
テスト画像の記録結果の評価は、検査ユニット9Aや検査ユニット9Bにより自動化することができる。検査ユニット9Aや検査ユニット9Bにより記録されたテスト画像を読み取り、その記録画像の特性をメインコントローラ13Aで解析して補正データを生成する。別の手法として、テスト画像の記録結果の評価を評価者が目視観察により行うことができ、補正データを評価者が入力するようにしてもよい。生成された補正データは、転写部TRと液吸収領域NPとの組合せ毎に、例えば、エンジン制御部14の記憶デバイスに記憶される。
図15(A)は補正データの設定処理例を示すフローチャートであり、例えば、メインコントローラ13Aが実行する処理例である。
S11ではテスト画像の記録動作を行う。図12(B)に示した例では、転写部TRと液吸収領域NPとの組合せが4つであるので、同じテスト画像を4回記録する。より具体的には、転写部TR1〜TR4に記録ユニット3によって同じテスト画像のインク像IMを順次形成し、対応する液吸収領域LP1〜LP4でその液体成分を除去した後、記録媒体に転写する。テスト画像が記録されたい記録媒体が4枚作成される。
S11の処理の後、又は、S11の処理と平行して、S12では検査ユニット9Aまたは検査ユニット9Bにより、記録されたテスト画像を読み取り、その読み取り結果を取得する。S13ではS12で取得したテスト画像の読み取り結果に基づいて補正データを設定し、エンジン制御部14にダウンロードする。エンジン制御部14は、その記憶デバイスに組合せ毎に補正データを保存する。以上により、補正データの設定処理が終了する。
図15(B)は補正データに基づく記録データの補正処理例を示すフローチャートであり、例えば、エンジン制御部14により実行される。
S21ではメインコントローラ13Aから受信した記録データと、その記録データに基づくインク像IMを形成する転写部TP及び液体成分を除去する液吸収領域LPの組合せとの対応づけを行う。S22ではS21で対応づけた組合せに対応する補正データを読み出し、記録データを補正する。これにより、転写部TPと液吸収領域LPとの組合せに起因する記録画像の品質変動を抑制できる。以上により一回の補正処理が終了する。
<システムの他の実施形態>
上記実施形態では、記録ユニット3が複数の記録ヘッド30を有するが、一つの記録ヘッド30を有してもよい。記録ヘッド30はフルラインヘッドでなくてもよく、記録ヘッド30を着脱自在に搭載するキャリッジがY方向に移動している間に記録ヘッド30からインクを吐出してインク像を形成するシリアル方式であってもよい。
上記実施形態では、記録ユニット3が複数の記録ヘッド30を有するが、一つの記録ヘッド30を有してもよい。記録ヘッド30はフルラインヘッドでなくてもよく、記録ヘッド30を着脱自在に搭載するキャリッジがY方向に移動している間に記録ヘッド30からインクを吐出してインク像を形成するシリアル方式であってもよい。
記録媒体Pの搬送機構は、ローラ対によって記録媒体Pを挟持して搬送する方式等、他の方式であってもよい。ローラ対によって記録媒体Pを搬送する方式等においては、記録媒体Pとしてロールシートを用いてもよく、転写後にロールシートをカットして記録物P’を製造してもよい。
また、本発明は上述の実施形態の1以上の機能を実現するプログラムをネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
2 転写体、5B 吸収ユニット、50 液吸収部材、51 駆動ユニット、512 変位ユニット、TR1〜TR4 転写部、LP1〜LP4 液吸収領域
Claims (10)
- 回転駆動される転写ドラムと、
前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部と、
前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段と、
前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シートと、
前記液吸収シートを循環的に回転移動させる駆動手段と、を備え、
前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である、
ことを特徴とする記録装置。 - 請求項1に記載の記録装置であって、
前記液吸収シートが前記転写部に接触した接触状態と、前記液吸収シートが前記転写部から離間した退避状態とに前記液吸収シートを変位させる変位手段と、
前記液吸収シートが前記転写部と接触する位置を液吸収位置とした場合、前記液吸収シートを前記接触状態から前記退避状態に変位させた後、再び前記接触状態に変位させる場合に、前記転写部と、該転写部に前記液吸収位置において接触する前記液吸収シートの領域との組合せが維持されるように前記駆動手段を制御する制御手段と、を更に備える、
ことを特徴とする記録装置。 - 請求項2に記載の記録装置であって、
前記液吸収シートの移動量を検知する第一のセンサと、
前記転写ドラムの回転量を検知する第二のセンサと、を更に備え、
前記制御手段は、前記第一のセンサ及び前記第二のセンサの検知結果に基づいて、前記組合せが維持されるように前記駆動手段を制御する、
ことを特徴とする記録装置。 - 請求項2に記載の記録装置であって、
前記転写部と、該転写部に前記液吸収位置において接触する前記液吸収シートの領域との組合せ毎に、前記インク像を形成するための記録データを補正する補正手段を更に備える、
ことを特徴とする記録装置。 - 請求項4に記載の記録装置であって、
前記組合せ毎の補正データを記憶する記憶手段を更に備え、
前記補正手段は前記記憶手段に記憶された前記補正データに基づき前記記録データを補正する、
ことを特徴とする記録装置。 - 請求項4に記載の記録装置であって、
前記組合せの数に対応する数のテスト画像の記録動作を行わせる制御手段を更に備える、
ことを特徴とする記録装置。 - 請求項1に記載の記録装置であって、
前記液吸収シートの周長は、前記円軌道の周長と同じである、
ことを特徴とする記録装置。 - 請求項1に記載の記録装置であって、
前記液吸収シートの移動速度と前記転写部の移動速度とが等速になるように制御される、
ことを特徴とする記録装置。 - 回転駆動される転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する転写部から記録媒体にインク像が転写される前の前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シートと、
前記液吸収シートを循環的に回転移動させる駆動手段と、を備え、
前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍である、
ことを特徴とする液吸収装置。 - 記録装置の制御方法であって、
前記記録装置は、
回転駆動される転写ドラムと、
前記転写ドラムの周面に配置され、前記転写ドラムの回転により円軌道上を循環的に回転移動する複数の転写部と、
前記転写部にインクを吐出し、前記転写部上にインク像を形成する記録手段と、
前記転写部に形成されたインク像を記録媒体に転写する転写動作の前に、前記転写部上の前記インク像から液体成分を吸収する無端の液吸収シートと、
前記液吸収シートを循環的に回転移動させる駆動手段と、
を備え、
前記液吸収シートの周長は、前記円軌道の周長の整数倍または整数の逆数倍であり、
前記制御方法は、
前記液吸収シートの移動速度と前記転写部の移動速度とが等速になるように制御する工程を有する、
ことを特徴とする制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131497A JP2019014097A (ja) | 2017-07-04 | 2017-07-04 | 記録装置、液吸収装置及び制御方法 |
| US16/020,130 US20190009594A1 (en) | 2017-07-04 | 2018-06-27 | Printing apparatus, liquid absorbing apparatus, and control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131497A JP2019014097A (ja) | 2017-07-04 | 2017-07-04 | 記録装置、液吸収装置及び制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019014097A true JP2019014097A (ja) | 2019-01-31 |
Family
ID=64903988
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017131497A Pending JP2019014097A (ja) | 2017-07-04 | 2017-07-04 | 記録装置、液吸収装置及び制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20190009594A1 (ja) |
| JP (1) | JP2019014097A (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3401104A4 (en) | 2016-01-05 | 2019-08-14 | C/o Canon Kabushiki Kaisha | INK JET RECORDING APPARATUS AND INK JET RECORDING METHOD |
| WO2017131072A1 (ja) | 2016-01-29 | 2017-08-03 | キヤノン株式会社 | インクジェット記録装置 |
| JP2017213857A (ja) | 2016-02-15 | 2017-12-07 | キヤノン株式会社 | インクジェット記録装置及びインクジェット記録方法 |
| JP2019014095A (ja) * | 2017-07-04 | 2019-01-31 | キヤノン株式会社 | 記録装置及び制御方法 |
| JP2019018389A (ja) | 2017-07-12 | 2019-02-07 | キヤノン株式会社 | 記録装置 |
| JP7344704B2 (ja) | 2018-08-07 | 2023-09-14 | キヤノン株式会社 | 記録装置及びそのノズル吐出状態の判定方法 |
| JP2020023178A (ja) | 2018-08-07 | 2020-02-13 | キヤノン株式会社 | 記録装置及びその検査方法 |
| JP7451257B2 (ja) | 2020-03-26 | 2024-03-18 | キヤノン株式会社 | インクジェット記録装置及びインクジェット記録方法 |
-
2017
- 2017-07-04 JP JP2017131497A patent/JP2019014097A/ja active Pending
-
2018
- 2018-06-27 US US16/020,130 patent/US20190009594A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20190009594A1 (en) | 2019-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018105215A1 (ja) | 液吸収装置、記録装置、記録方法および製造方法 | |
| JP2019014097A (ja) | 記録装置、液吸収装置及び制御方法 | |
| JP2019014090A (ja) | 記録装置、液吸収装置及び制御方法 | |
| JP7438263B2 (ja) | インクジェット記録装置及びその温度制御方法 | |
| JP6960754B2 (ja) | 液吸収装置、記録装置、記録方法および製造方法 | |
| JP2019014092A (ja) | 記録装置、及び記録方法 | |
| JP2019018389A (ja) | 記録装置 | |
| JP2019014091A (ja) | 記録装置、液吸収装置及び制御方法 | |
| JP2018144358A (ja) | インクジェット記録装置及びその記録方法 | |
| JP6948133B2 (ja) | 液吸収装置、記録装置、記録方法および製造方法 | |
| JP2018192678A (ja) | 画像処理装置、制御方法及びプログラム | |
| JP6960756B2 (ja) | 液吸収装置、記録装置、及び記録方法 | |
| JP7193946B2 (ja) | 液体吐出装置及びその制御方法 | |
| JP2019014095A (ja) | 記録装置及び制御方法 | |
| JP2019142030A (ja) | インクジェット記録装置 | |
| JP6976091B2 (ja) | 記録装置及び制御方法 | |
| JP6937624B2 (ja) | インクジェット記録装置及びその記録方法 | |
| JP2020023104A (ja) | 記録装置、清掃装置、及び記録方法 | |
| KR20200016802A (ko) | 인쇄 장치 및 인쇄 방법 | |
| JP2020023113A (ja) | 記録装置及びその記録制御方法 | |
| JP6864521B2 (ja) | 記録装置および制御方法 | |
| JP6970541B2 (ja) | 記録装置、液吸収装置及び制御方法 | |
| JP2019018415A (ja) | 記録装置及びその記録制御方法 | |
| JP2018149742A (ja) | クリーニング装置、記録装置、及び清掃方法 | |
| JP2020001341A (ja) | 記録装置およびその制御方法 |