JP2018200411A - 双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 - Google Patents
双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 Download PDFInfo
- Publication number
- JP2018200411A JP2018200411A JP2017105295A JP2017105295A JP2018200411A JP 2018200411 A JP2018200411 A JP 2018200411A JP 2017105295 A JP2017105295 A JP 2017105295A JP 2017105295 A JP2017105295 A JP 2017105295A JP 2018200411 A JP2018200411 A JP 2018200411A
- Authority
- JP
- Japan
- Prior art keywords
- loupe
- plate member
- user
- plane
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Landscapes
- Telescopes (AREA)
Abstract
【課題】双眼ルーペ装置の組立において、使用者の近方視における瞳孔位置に合わせてルーペを適正な取付位置・角度で取り付ける。
【解決手段】ルーペを取り付ける前のフレーム25に矩形の透明な測定補助プレート26を固定して使用者に装用させ、近方視している使用者の顔面を作業位置Pからカメラ22で撮像して第1の画像を取得する。第1の画像をコンピューター23で演算処理して、第1の画像上で測定補助プレートの4頂点と使用者の近方視における左右瞳孔の座標位置を測定し、これらに基づいてプレート部材の平面におけるルーペの取付位置及び/又は取付角度を決定する。
【選択図】図19
【解決手段】ルーペを取り付ける前のフレーム25に矩形の透明な測定補助プレート26を固定して使用者に装用させ、近方視している使用者の顔面を作業位置Pからカメラ22で撮像して第1の画像を取得する。第1の画像をコンピューター23で演算処理して、第1の画像上で測定補助プレートの4頂点と使用者の近方視における左右瞳孔の座標位置を測定し、これらに基づいてプレート部材の平面におけるルーペの取付位置及び/又は取付角度を決定する。
【選択図】図19
Description
本発明は、双眼ルーペ装置の組立に関するものである。
従来、双眼ルーペ装置は、例えば医療分野で外科等の手術を行ったり、他の様々な分野で精密作業を行う際に、術部や作業部位を拡大するために広く使用されている。特に医療用の双眼ルーペ装置は、人命に関わる場合があることから、使用中継続して高精度の視認性を確保することが要求されている。
一般に、双眼ルーペ装置としては、左右のルーペ(拡大鏡)を、使用者が装用する眼鏡に装着する眼鏡型のもの(例えば、特許文献1、2を参照)と、使用者が頭部に装用するヘッドバンド(ベルト)に装着するヘッドバンド型のもの(例えば、特許文献3を参照)が知られている。更に、眼鏡型の双眼ルーペ装置には、ルーペを眼鏡のレンズに直接固定するレンズ嵌込型のもの(例えば、特許文献1を参照)と、ルーペを眼鏡レンズの直ぐ前方に位置するように、クリップやアームで眼鏡のフレームに取外可能に又は固定して装着する前掛け式のもの(例えば、特許文献2を参照)とがある。
図1は、一般的なレンズ嵌込型の双眼ルーペ装置を例示している。同図の双眼ルーペ装置1は、一般の視力矯正用眼鏡と同様の構造を有するフレーム2と、該フレームの左右リム3にそれぞれ嵌め込まれた左右のキャリアレンズ4と、左右のルーペ5と、各ルーペ5をそれぞれ対応するキャリアレンズ4に固定するための取付部6とから構成される。フレーム2は、装用時に使用者の耳に掛けて双眼ルーペ装置1を支持するためのテンプル7と、左右リム3を連結するブリッジ8と、装用時に使用者の鼻を挟むように左右リム3にそれぞれ結合されたパッド(図示せず)とを有する。
図2(a)に示すように、キャリアレンズ4には、ルーペ5を装着するためのルーペ取付孔10が所定のルーペ取付位置に貫設されている。取付部6は、短円筒状の取付アダプター11と、内周に雌ねじを有するルーペ固定リング12とからなる。取付アダプター11は、図2(b)に示すように、キャリアレンズ4の裏側(装用者の顔面側)からルーペ取付孔10内に挿入して嵌合保持される。ルーペ5は、その後端部(接眼レンズ側)から取付アダプター11の貫通孔内に挿入され、該後端部外周にルーペ固定リング12をキャリアレンズ4裏側から螺合締着させることによって、キャリアレンズ4に固定される。
図3は、外科医師である使用者Uが、略直立した状態のまま、手許で外科手術を行う際の作業姿勢を例示している。このとき、使用者Uは、頭部16が図中破線で示す直立位置16′から前方下向きに、或る角度α傾いた状態を維持しながら、作業対象である手術位置Pを注視している。
一般に人の眼は、図4に示すように、遠方視で視線(視軸)が顔の正面を向いた状態から、読書や手作業等のために近方視に移るとき、眼球が下方に回旋する。そのため、視線(視軸)は、遠方視における向き17(図4における水平方向)から、近方視では下方に或る角度r傾斜した向き17’になる。この近方視における視線の下方傾斜は、図3に示すように頭部が前方下向きに傾いた作業姿勢でも、同様である。従って、図1のルーペ5は、図4に示すように、双眼ルーペ装置1の正面方向に関して下方傾斜角度rで取り付ける必要がある。
更に人の眼は、図5に示すように、遠方視で左右の視線(視軸)が顔の正面を向いた平行な状態から、読書や手作業等のために近方視に移るとき、内寄せして輻輳する。そのため、左右の視線(視軸)は、遠方視における向き18(図5における正面方向)から、近方視では、左右それぞれに内側へ或る角度p,q傾斜した向き18’、18”になる。図1の左右のルーペ5は、図5に示すように、双眼ルーペ装置1の正面方向に関してそれぞれ内側傾斜角度p,qで取り付ける必要がある。
本願発明者は既に、かかる双眼ルーペ装置においてルーペをキャリアレンズに装着する際の下方傾斜角度及び内側傾斜角度を決定することができる双眼ルーペの製作方法を提案している(例えば、特許文献4を参照)。この方法では、キャリアレンズにルーペを装着する前の状態でフレームを使用者に装用させ、作業姿勢で装用者の顔面を作業位置からカメラで撮像し、その画像データといくつかの作業位置からの実測距離とを用いて、ルーペの下方傾斜角度及び内側傾斜角度を算出する。
図6は、ルーペの下方傾斜角度rの算出方法を模式的に説明する概念図である。ここで、Mは、作業位置Pからキャリアレンズ4までの直線距離、Nは、作業位置Pからキャリアレンズ4までの水平距離、αは、キャリアレンズ4の正面視方向(図4における水平方向)からの前傾角度、βは、作業位置Pからキャリアレンズ4に延長する直線と作業位置Pからキャリアレンズ4側に延長する水平な直線とがなす角度である。図6から分かるように、下方傾斜角度rは、
r=90−(90−β)−α=β−α
である。特許文献4では、前記作業姿勢の使用者を側方からカメラで撮像し、その画像データから鉛直方向に関する使用者の頭部又はキャリアレンズ4の傾斜角度を測定することによって、角度αを求めている。
r=90−(90−β)−α=β−α
である。特許文献4では、前記作業姿勢の使用者を側方からカメラで撮像し、その画像データから鉛直方向に関する使用者の頭部又はキャリアレンズ4の傾斜角度を測定することによって、角度αを求めている。
しかしながら、双眼ルーペ装置1のキャリアレンズ4は、一般的な眼鏡レンズと同様に、装用者の視線とレンズ光軸とを揃えるために、元々顔の正面方向に関して所定の角度前傾させて取り付けられている。しかも、その前傾取付角度は、個々の装用者によって多少異なる。フレーム2のテンプル7も、装用者によって掛け位置が変わるので、必ずしも顔の正面方向と平行に(図4の水平方向)保持されるわけではない。また、カメラの撮像画像から、鉛直方向及び頭部の前傾角度αを高精度に測定することは、実際上容易でない。このため、上述した従来技術において、ルーペの下方傾斜角度rを前傾角度αの実測値から高精度に算出することは、比較的困難である。
更に、各ルーペ5のキャリアレンズ4上の取付位置は、その光軸が、前記作業姿勢で作業位置Pを注視している使用者の視線と一致するように設定することが好ましい。しかしながら、人の顔は通常左右対称でなく、そのためにフレーム2は、多くの場合、装用者が正面視していても、左右の瞳孔位置が同じ高さであっても、左右にいくらか傾いている。また、左右方向に、フレーム2の中心位置も、顔面の中心位置とは必ずしも一致せず、近方視における眼の内寄せ量も、上述したように左右で異なる。
そこで、本発明は、上述した従来技術の問題点に鑑みてなされたものであり、その目的は、双眼ルーペ装置の組立において、頭部を前傾した作業姿勢で作業位置を近方視している使用者の視線に合わせて、ルーペをより高精度に取り付けることができる方法を提供することにある。
特に本発明は、前記作業姿勢における使用者の頭部前傾角度をより高精度に測定することができ、それによってルーペをより正確な下方傾斜角度で配置することができる双眼ルーペ装置の組立方法を提供することを目的としている。
また、本発明の目的は、双眼ルーペ装置の組立におけるルーペの取付位置をより高精度に、しかも比較的簡単に決定することができる方法及びそのためのシステムを提供することにある。
更に本発明は、双眼ルーペ装置の組立において、ルーペの取付位置をより高精度かつ簡単に決定するのに適したルーペ取付用補助具を提供することを目的としている。
本発明のルーペ取付用補助具は、使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応する左右1対のルーペを所定の位置に取り付けるために使用する補助具であって、
透明かつ平坦な概ね矩形のプレート部材からなり、
プレート部材が該プレート部材を保持具に取外可能に固定するための取付部を有し、
プレート部材は、取付部によってプレート部材を固定した保持具を使用者の頭部又は顔部に装着した状態で、近方視している使用者の顔部を該使用者の左右眼の近方視線上の作業位置から見たとき、左右眼の瞳孔がプレート部材の平面内に位置するような大きさを有する、ことを特徴とする。
透明かつ平坦な概ね矩形のプレート部材からなり、
プレート部材が該プレート部材を保持具に取外可能に固定するための取付部を有し、
プレート部材は、取付部によってプレート部材を固定した保持具を使用者の頭部又は顔部に装着した状態で、近方視している使用者の顔部を該使用者の左右眼の近方視線上の作業位置から見たとき、左右眼の瞳孔がプレート部材の平面内に位置するような大きさを有する、ことを特徴とする。
これにより、プレート部材の平面における使用者の左右眼の瞳孔位置を特定することができるので、使用者の瞳孔位置に合わせてルーペの取付位置を簡単に決定することができる。
或る実施形態では、取付部は、プレート部材を、その平面が保持具を装着した使用者の遠方視線に関して直交するように、保持具に固定するようになっている。
別の実施形態では、プレート部材は、その周縁に沿って設けられた概ね矩形の枠線を有する。
或る実施形態では、前記枠線が、その周囲よりも高い光反射率を有する。
別の実施形態では、前記枠線が白色又は淡色である。
本発明のルーペ取付位置決定方法は、使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応して取り付けられる左右1対のルーペの取付位置を決定するための方法であって、
上述した本発明のルーペ取付用補助具を取り付けた保持具を準備する過程と、
前記保持具を使用者の頭部又は顔部に装着した状態で、近方視している前記使用者の顔部を該使用者の前記左右眼の近方視線上の作業位置から撮像して、前記ルーペ取付用補助具の前記プレート部材全体及び該プレート部材の平面内に前記使用者の近方視における左右瞳孔を含むように第1の画像を取得する過程と、
前記第1の画像上で前記プレート部材の頂点及び前記近方視における左右瞳孔の座標位置を測定する過程と、
測定した前記プレート部材の頂点及び前記左右瞳孔の座標位置に基づいて、前記作業位置に向けられた前記使用者の近方視線が前記プレート部材を通過する点の座標を演算することにより、前記プレート部材の平面における前記ルーペの取付位置及び/又は取付角度を決定する過程とを含む、ことを特徴とする。
上述した本発明のルーペ取付用補助具を取り付けた保持具を準備する過程と、
前記保持具を使用者の頭部又は顔部に装着した状態で、近方視している前記使用者の顔部を該使用者の前記左右眼の近方視線上の作業位置から撮像して、前記ルーペ取付用補助具の前記プレート部材全体及び該プレート部材の平面内に前記使用者の近方視における左右瞳孔を含むように第1の画像を取得する過程と、
前記第1の画像上で前記プレート部材の頂点及び前記近方視における左右瞳孔の座標位置を測定する過程と、
測定した前記プレート部材の頂点及び前記左右瞳孔の座標位置に基づいて、前記作業位置に向けられた前記使用者の近方視線が前記プレート部材を通過する点の座標を演算することにより、前記プレート部材の平面における前記ルーペの取付位置及び/又は取付角度を決定する過程とを含む、ことを特徴とする。
このように第1の画像を演算処理することによって、ルーペ取付用補助具のプレート部材の平面上で使用者の近方視における左右眼の瞳孔位置を特定でき、それにより使用者の瞳孔位置に合わせてルーペの取付位置及び/又は取付角度を簡単に決定することができる。
或る実施形態では、ルーペの取付位置を決定する過程において、第1の画像上で、左右瞳孔の中心を通過する直線を回転中心軸として、その平面が真正面を向くように前記プレート部材を回転させた、前記第1の画像の平面に射影される前の仮想のプレート部材の頂点の座標位置を、前記測定した前記プレート部材の頂点の座標位置に基づいて算出し、算出した前記仮想のプレート部材の頂点の座標位置に基づいて前記プレート部材の平面における前記ルーペの取付位置を決定する。
別の実施形態では、保持具を使用者の頭部又は顔部に装着した状態で、遠方視している使用者の顔部を正面から撮像して、前記プレート部材の全体及び該プレート部材の平面内に前記使用者の遠方視における左右瞳孔を含むように第2の画像を取得する過程と、
第2の画像上で前記プレート部材の頂点及び前記遠方視における左右瞳孔の座標位置を測定する過程とを更に含む。
第2の画像上で前記プレート部材の頂点及び前記遠方視における左右瞳孔の座標位置を測定する過程とを更に含む。
或る実施形態では、ルーペの取付位置を決定する過程において、測定したプレート部材の頂点の座標位置と前記プレート部材の実寸法とに基づいて、前記第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置から前記第1の画像の平面における前記プレート部材の前記頂点の座標位置に変換するための変換行列を求め、前記変換行列の逆変換行列を用いて、前記プレート部材の前記平面における前記頂点の座標位置から前記三次元座標位置を算出する。
別の実施形態では、ルーペの取付角度を決定する過程において、使用者の遠方視線に関する近方視線の下方傾斜角度及び/又は内側傾斜角度を決定する。
或る実施形態では、作業位置から前記プレート部材の平面までの直線距離と水平距離とを測定し、直線距離及び水平距離と使用者の頭部の前傾角度とに基づいて、下方傾斜角度を決定する。
別の実施形態では、第1の画像におけるプレート部材の頂点の座標位置と第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置とに基づいて、第1の画像におけるプレート部材を含む平面と第1の画像の平面に射影される前のプレート部材を含む平面との回転角を算出することにより、下方傾斜角度を決定する。
別の実施形態では、作業位置から前記プレート部材の平面までの直線距離と、プレート部材の平面上における前記使用者の前記左右瞳孔の内寄せ量とを測定し、それらに基づいて前記左右眼の各内側傾斜角度を決定する。
或る実施形態では、記保持具が、使用者の顔部に装着されるフレームと、フレームに装着されるキャリアレンズとからなり、ルーペがキャリアレンズに取り付けられる。
別の実施形態では、保持具が、使用者の顔部に装着されるフレームと、フレームから正面前方に延出する支持部とからなり、ルーペが支持部により支持されるように取り付けられる。
また別の実施形態では、保持具が、使用者の頭部に装着されるヘッドバンドと、ヘッドバンドから正面前方に延出する支持部とからなり、ルーペが支持部により支持されるように取り付けられる。
本発明のルーペ取付位置決定システムは、使用者の頭部又は顔部に装着される保持具に関して使用者の左右眼に対応して取り付けられる左右1対のルーペの取付位置を決定するためのシステムであって、
カメラと、
カメラが撮像した画像を処理するための演算処理装置とからなり、
演算処理装置は、カメラが、上述した本発明のルーペ取付用補助具を取り付けた保持具を使用者の頭部又は顔部に装着した状態で、近方視している使用者の顔部を該使用者の左右眼の近方視線上の作業位置から撮像することにより、ルーペ取付用補助具のプレート部材全体及び該プレート部材の平面内に使用者の近方視における左右瞳孔を含むように取得した第1の画像を演算処理して、第1の画像上でプレート部材の頂点及び近方視における左右瞳孔の座標位置を測定し、測定したプレート部材の頂点及び左右瞳孔の座標位置に基づいて、作業位置に向けられた使用者の近方視線がプレート部材を通過する点の座標を演算して、プレート部材の平面におけるルーペの取付位置及び/又は取付角度を決定する機能を有する、ことを特徴とする。
カメラと、
カメラが撮像した画像を処理するための演算処理装置とからなり、
演算処理装置は、カメラが、上述した本発明のルーペ取付用補助具を取り付けた保持具を使用者の頭部又は顔部に装着した状態で、近方視している使用者の顔部を該使用者の左右眼の近方視線上の作業位置から撮像することにより、ルーペ取付用補助具のプレート部材全体及び該プレート部材の平面内に使用者の近方視における左右瞳孔を含むように取得した第1の画像を演算処理して、第1の画像上でプレート部材の頂点及び近方視における左右瞳孔の座標位置を測定し、測定したプレート部材の頂点及び左右瞳孔の座標位置に基づいて、作業位置に向けられた使用者の近方視線がプレート部材を通過する点の座標を演算して、プレート部材の平面におけるルーペの取付位置及び/又は取付角度を決定する機能を有する、ことを特徴とする。
これにより、比較的簡単なシステム構成で、ルーペ取付用補助具のプレート部材の平面上で使用者の近方視における左右眼の瞳孔位置を特定でき、それにより使用者の瞳孔位置に合わせてルーペの取付位置及び/又は取付角度を簡単に決定することができる。
或る実施形態では、演算処理装置は、第1の画像上で、前記左右瞳孔の中心を通過する直線を回転中心軸として、その平面が真正面を向くように前記プレート部材を回転させた、前記第1の画像の平面に射影される前の仮想のプレート部材の頂点の座標位置を、前記測定した前記プレート部材の頂点の座標位置に基づいて算出し、算出した前記仮想のプレート部材の頂点の座標位置に基づいて前記プレート部材の平面における前記ルーペの取付位置を決定する。
別の実施形態では、演算処理装置は、カメラが、保持具を使用者の頭部又は顔部に装着した状態で、遠方視している前記使用者の顔部を正面から撮像して、前記プレート部材の全体及び該プレート部材の平面内に前記使用者の遠方視における左右瞳孔を含むように取得した第2の画像を処理し、前記第2の画像上で前記プレート部材の頂点及び前記遠方視における左右瞳孔の座標位置を測定する。
また別の実施形態では、演算処理装置は、測定したプレート部材の頂点の座標位置とプレート部材の実寸法とに基づいて、第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置から第1の画像の平面における前記プレート部材の前記頂点の座標位置に変換するための変換行列を求め、前記変換行列の逆変換行列を用いて、前記プレート部材の前記平面における前記頂点の座標位置から前記三次元座標位置を算出する。
或る実施形態では、演算処理装置は、使用者の遠方視線に関する前記近方視線の下方傾斜角度及び/又は内側傾斜角度を決定する。
別の実施形態では、演算処理装置は、作業位置からプレート部材の平面までの直線距離及び水平距離と使用者の頭部の前傾角度とに基づいて、前記下方傾斜角度を決定する。
別の実施形態では、演算処理装置は、第1の画像における前記プレート部材の頂点の座標位置と第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置とに基づいて、第1の画像におけるプレート部材を含む平面と第1の画像の平面に射影される前のプレート部材を含む平面との回転角を算出することにより、前記下方傾斜角度を決定する。
また別の実施形態では、演算処理装置は、作業位置からプレート部材の平面までの直線距離と、プレート部材の平面上における使用者の前記左右瞳孔の内寄せ量とに基づいて、左右眼の各内側傾斜角度を決定する。
本発明の別の側面によれば、使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応して取り付けられる左右1対のルーペを備えた双眼ルーペ装置の組立方法であって、
上述した本発明のルーペ取付位置決定方法により、ルーペを保持具に関して取り付ける取付位置及び/又は取付角度を決定する過程と、
保持具に関してルーペを決定された取付位置及び/又は取付角度に取り付ける過程とを含む、ことを特徴とする双眼ルーペ装置の組立方法が提供される。
上述した本発明のルーペ取付位置決定方法により、ルーペを保持具に関して取り付ける取付位置及び/又は取付角度を決定する過程と、
保持具に関してルーペを決定された取付位置及び/又は取付角度に取り付ける過程とを含む、ことを特徴とする双眼ルーペ装置の組立方法が提供される。
これにより、ルーペが保持具に関して適正な取付位置及び/又は取付角度に取り付けられるように、双眼ルーペ装置を組み立てることができる。
或る実施形態では、保持具が、使用者の顔部に装着されるフレームと、フレームに装着されるキャリアレンズとからなり、ルーペをキャリアレンズに取り付ける。
別の実施形態では、保持具が、使用者の顔部に装着されるフレームと、フレームから正面前方に延出する支持部とからなり、ルーペを記支持部に支持されるように取り付ける。
また、別の実施形態では、保持具が、前記使用者の頭部に装着されるヘッドバンドと、前記ヘッドバンドから正面前方に延出する支持部とからなり、ルーペを支持部に支持されるように取り付ける。
以下に、本発明の好適な実施形態を、添付図面を参照しながら詳細に説明する。尚、添付図面において、同一又は類似の要素には、同一又は類似の参照符号を付して表示するものとする。
図7は、本発明による双眼ルーペ装置の組立において、左右ルーペの取付位置を決定するためのシステムの構成全体を概略的に示している。同図において、ルーペ取付位置決定システム21は、デジタルカメラであるカメラ22と、その撮像画像を処理するためのコンピューター23と、それらを接続する通信ケーブル24とを備える。ルーペ取付位置決定システム21は、ルーペ取付位置を決定するためだけでなく、左右瞳孔の座標位置を検出して、ルーペの下方傾斜角度及び内側傾斜角度を算出するためにも使用される。
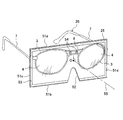
カメラ22は、左右ルーペを取り付ける前のフレーム25を装用した使用者Uの顔及び該フレームを、正面側から撮像するために使用される。フレーム25の前面には、ルーペの取付位置を決定するのに好適なルーペ取付位置決定用補助具として、測定補助プレート26が固定されている。本実施形態では、使用者Uとして、作業位置Pで外科手術を行う外科医を想定することができる。
カメラ22による撮像は、その光軸を、図8に矢印27で示すように、頭部を角度αで前傾した作業姿勢の使用者Uの顔面を作業位置Pから斜め上向きにして、及び、矢印28で示すように、水平正面視している顔面(同図中、破線で示す)を正面から真直ぐ水平に向けて行われる。撮像した画像データは、後述するように処理するために、カメラ22から通信ケーブル24を介してコンピューター23に送られる。
図9は、カメラ22の構成を概略的に示している。カメラ22は、制御部31、ストロボ光照射装置32、光学系33、撮像素子34、画像メモリ35、及びコンピュータ23との間でデータ及び信号の授受を行うインターフェース36を備える。制御部31は、カメラ22の各部を制御するプログラムを記憶させたプログラム記憶部と、前記プログラムを実行するためのCPUとを有する。更に制御部31は、コンピュータ23からの指示に応じた光学系33の撮像倍率やピント合わせ等の動作、画像メモリ35に対する画像データの保存や読出し等を制御する。
図10は、コンピューター23の構成を概略的に示している。コンピューター23は、モニター部41、入力デバイス42、プログラムに基づいて所定の演算処理や制御処理を行う中央制御部43、及びカメラ22との間でデータ及び信号の授受を行うインターフェース44を備える。中央制御部43は、撮像プログラム43a、ユーザーインターフェースプログラム43b、画像処理プログラム43c及び解析プログラム43dと、これらプログラムを実行するための中央演算処理装置CPU45とを有する。
本実施形態において、画像処理プログラム43cは、識別対象を上位から順に細分化して分類する処理を行うカスケード分類器であり、カメラ22により撮像した使用者の画像の中から顔や目を識別する。そのために、画像処理プログラム43cは、予め学習により顔や目の特徴を記憶した顔検出カスケードファイル43eと目検出カスケードファイル43fとを備える。
測定補助プレート26は、図11に示すように、横に長い矩形の平坦で透明なプレート部材からなる。測定補助プレート26の下辺51bの中央には、使用者がフレーム25を装用したときに、該測定補助プレートに鼻が接触しないように、略三角形の切欠き52が形成されている。
測定補助プレート26の周縁には、切欠き52を除く全周に亘って、一定幅で矩形の枠線53が設けられている。枠線53は、カメラ22による撮像画像中で、その周囲から明確に識別し得るように、撮影時に照射されるストロボ光の反射率が高い塗料や白色等の淡色の材料で形成することが好ましい。
測定補助プレート26は、例えばビス54等の適当な取付具で、フレーム25のブリッジ8の前面に取外可能に固定される。ここで、測定補助プレート26は、フレーム25に対して、上下両辺51a,51bが該フレームの水平方向と平行をなし、左右方向に両者の中心位置が一致し、かつその平面がフレーム25の正面視方向55と直交するように配置する。別の実施形態では、測定補助プレート26をクリップ等の他の取付具で、同様に取外可能にフレーム25のブリッジ8に固定することができる。
測定補助プレート26の上下寸法及びフレーム25への取付位置は、フレーム25を正面から見たとき、上辺51aが該フレームのリム3の上端より上方に位置し、かつ近方視線の方向を逆に斜め下側から見たとき、即ち前記作業姿勢の装用者を作業位置Pから斜め上向きに見たとき、下辺51bがリム3の下端より下方に位置するように設定することが好ましい。測定補助プレート26の左右寸法は、フレーム25を正面から及び近方視線の方向を逆に見たときに、左右側辺51c,51dが、リム3の左右外端付近に、少なくとも装用者の瞳孔よりも外側に位置するように、設定することが好ましい。
これにより、使用者が装用しているフレーム25を、図8の矢印27,28のいずれの方向から撮影しても、常に該フレームのリム3の上下両端及び使用者の両方の瞳孔が測定補助プレート26の矩形枠線53の内側に位置する画像を得ることができる。従って、後述するように、カメラ22の画像データを演算処理することによって、フレーム25のキャリアレンズ4上における使用者の左右瞳孔位置を、撮像画像上における枠線53との相対的な位置関係から確実に求めることができる。
尚、図4に例示するように、キャリアレンズ4は、正面側に凸状の湾曲したレンズ面を有し、かつ上述したように、正面視方向に関して前傾させてフレーム25に装着されている。そのため、キャリアレンズ4の湾曲レンズ面と平坦な測定補助プレート26の裏面との間には隙間が生じ、その大きさ即ち離隔距離は、測定補助プレート26上の平面位置によって異なる。しかも、この離隔距離は、フレーム25自体の種類や構造、キャリアレンズ4の前傾角によって変化する場合がある。そこで、使用されるフレーム25の種類や構造毎、キャリアレンズ4の前傾角毎に、予め測定補助プレート26上の平面位置に関する前記離隔距離を実測してデータ化しておくことが好ましい。
図12のフロー図は、本発明の双眼ルーペ装置の組立方法を行程順に示している。
先ず、ルーペを未だ取り付けてない測定補助プレート26付きフレーム25を準備する(ステップS1)。次に、このフレーム25を使用者に装用させ、その顔及びフレーム25をカメラ22で撮像する(ステップS2)。撮像した画像データは、カメラ22から通信ケーブル24を介してコンピューター23に送られ、処理される(ステップS3)。コンピューター23は、カメラ22からの前記画像データと、入力デバイス42からの入力データとに基づいて、画像上の使用者の左右瞳孔位置、ルーペを取り付けるための下方傾斜角度r及び内側傾斜角度p,qを算出する(ステップS4)。
更にコンピューター23は、前記画像データ及び入力データに基づいて、キャリアレンズ4上のルーペ取付位置を決定する(ステップS5)。次に、決定した前記ルーペ取付位置、下方傾斜角度r及び内側傾斜角度p,qに基づいて、測定補助プレート26を取り外したフレーム25(又は測定補助プレート26を取り付けていない同一構造のフレーム25)のキャリアレンズ4に、ルーペ取付孔を加工形成する(ステップS6)。最後に、左右のルーペをそれぞれルーペ取付孔に挿入し、固定することによって、双眼ルーペ装置が完成する(ステップS7)。
以下に、上記行程の各ステップをより詳細に説明する。最初のステップS1では、使用者が実際の双眼ルーペ装置で使用する種類及びサイズのフレームに測定補助プレート26を、図11に関連して上述したように取り付けて、フレーム25を準備する。準備したフレーム25は、使用者に実際の作業時と同じように装用させる。
ステップS2では、図8に矢印27で示すように、頭部を角度αで前傾させた作業姿勢の使用者Uの顔を、カメラ22を作業位置Pに設置して撮像する第1の撮影と、矢印28で示すように、頭部を真直ぐに立てた直立姿勢で使用者Uの顔を正面から撮像する第2の撮影とを行う。後述するように、第1の撮影による第1画像は、専らルーペの下方傾斜角度r及び内側傾斜角度p,qと、ルーペ取付位置を求めるために使用され、第2の撮影による第2画像は、専ら前記第1画像と組み合わせて、ルーペ取付位置を求めるために使用される。
前記撮影は、コンピューター23がカメラ22の動作を制御して行われる。コンピューター23は、中央制御部43が撮像プログラム43aを実行してカメラ22の光学系33を制御し、その焦点距離を、フレーム25に取り付けた測定補助プレート26の中心点O(図11に図示)に合わせる。カメラ22は、制御部31がコンピューター23からの指示を受けて、光学系33が捉える画像を撮像素子34によって電気信号に変換し、その画像信号をインターフェース36を介してコンピューター23に出力する。
コンピューター23は、カメラ22から送られた前記画像をモニター部41に表示する。モニター部41の表示画像から、ルーペ取付位置決定システム21のオペレーターは、カメラ22が捉える画像の範囲や位置合わせ、焦点距離等を調整するために、入力デバイス42から必要な指示を入力することができる。この指示に従って、コンピューター23はカメラ22を制御し、モニター部41に表示される画像を調整する。
モニター部41上の画像が良好に調整されると、オペレーターは、コンピューター23上でカメラ22に撮像即ちシャッターを切るように指示を入力する。カメラ22は、コンピューター23を介して送られるオペレーターの撮像指示を受けると、これに直ちに応答し、ストロボ光照射装置32をオンしてストロボ光を照射し、撮像する。撮像した画像は、カメラ22の撮像素子34により電気信号に変換して出力され、その画像データは、制御部31により画像メモリ35に保存される。
ステップS3において、コンピューター23は、オペレーターが画像処理の指示を入力すると、中央制御部43がユーザーインターフェースプログラム43bを実行する。これにより、モニター部41には、ユーザーインターフェース画面が表示される。図13は、かかるユーザーインターフェース画面の一例を示している。前記ユーザーインターフェース画面は、撮像画像を表示するために設けられた上部の画像表示領域IMを有し、その下部には、複数の動作の指示ボタンと数値表示窓とが設けられている。
オペレーターが前記ユーザーインターフェース画面上の「画像ファイルを開く」ボタンをクリックすると、カメラ22の画像メモリ35に保存されている画像データが、モニター部41上の所定の表示位置(図示せず)に一覧表示される。この一覧表示から特定の画像データがオペレーターによって選択されると、該画像データは、中央制御部43により画像メモリ35から読み出されて、図13に例示するように、画像表示領域IMに表示される。
次に、ステップS4において、オペレーターは、前記ユーザーインターフェース画面から所望の処理を選択することができる。例えば、オペレーターが「瞳孔検出を行う」ボタンにチェックを入れて「解析開始」ボタンをクリックすると、コンピューター23は、中央制御部43が画像処理プログラム43cを実行し、画像表示領域IMに表示されている画像を解析して、該画像上の瞳孔位置を検出する処理を実行する。また、「マーカー検出を行う」ボタンにチェックを入れて「解析開始」ボタンをクリックすると、コンピューター23は、中央制御部43が同様に画像処理プログラム43cを実行し、画像表示領域IMの表示画像を解析して、測定補助プレート26の中心点Oの位置を解析する。
図14(a)は、画像処理プログラム43cによる瞳孔位置検出の処理手順を示している。画像処理プログラム43cは、ステップS3で選択した前記画像データを処理して、画像から明るさが鋭敏に、換言すれば不連続に変化している箇所を特定することにより、瞳孔位置を検出する。この処理は、図14(a)に示す第1〜第4ステージからなる4つの過程に従って行われる。
先ず第1ステージにおいて、中央制御部23は、顔検出カスケードファイル43eを使用し、顔に特有の画像特徴から、画像表示領域IMの画像上の識別対象が顔に該当するか否かを判断して、顔検出を行う。次の第2ステージでは、前記識別対象を細分化して、目検出カスケードファイル43fを使用し、目に特有の画像特徴から、前記画像上の識別対象が目に該当するか否かを判断して、目検出を行う。
第3ステージでは、目の検出画像を二値化して虹彩の輪郭を検出する。更に、第4ステージでは、モルフォロジー処理を行って、最大輝度の矩形を検出する。これにより、コンピューター23は、使用者の右眼瞳孔中心の座標位置(XR、YR)及び左眼瞳孔中心の座標位置(XL、YL)を検出し、前記ユーザーインターフェース画面に表示する。この座標位置の表示は、例えば、画像表示領域IMの上辺左隅の点を座標原点Oに設定することができる。
図14(b)は、画像処理プログラム43bにより測定補助プレート26を検出する処理手順を示している。画像処理プログラム43bは、同様にステップS3で選択した前記画像データを処理して、同図に示す第1〜第3ステージからなる3つの過程に従って、測定補助プレート26を検出する。
第1ステージにおいて、中央制御部43は、顔検出カスケードファイル43eを使用して顔検出を行い、測定補助プレート26が存在する領域の絞り込みを行う。次の第2ステージでは、顔の検出画像をポリライン化し、角が4個ある対象の中から、各角の角度が90度に近いものを抽出して、測定補助プレート26を認識する。
第3ステージにおいて、コンピューター23は、このようにして認識した測定補助プレート26の中心点Oの座標位置と、画面上のスケールとを画像表示領域IMに表示する。本実施形態において、前記スケールは、1mmを表示画像のピクセル数に換算して示しており、中央制御部43は、予めコンピューター23に入力されている測定補助プレート26の実際のサイズに基づいて算出する。
次に、コンピューター23は、解析プログラム43dを実行する。解析プログラム43dは、上述した図14(a)、(b)の処理により検出した左右瞳孔の中心位置と、測定補助プレート26の中心点Oの位置とを用いて、以下に説明するように、ルーペの下方傾斜角度r及び内側傾斜角度p,qを算出する。
下方傾斜角度rは、図6に関連して説明したように、使用者の前記作業姿勢における頭部の前傾角度αと、作業位置Pからキャリアレンズ4を見た角度(仰角)βとから求めることができる。角度βは、上述したように、作業位置Pからキャリアレンズ4までの直線距離Mと水平距離Nとから求めることができる。
尚、距離M,Nは、上述したように、例えばメジャーで実測することができる。また、距離Mは、作業位置Pから測定補助プレート26の中心点Oにレーザーを照射するレーザー計測機を用いることができる。更に、カルラ22の光学系の焦点距離fと、測定補助プレート26の実際の横寸法、及びカメラ22の撮像面上(即ち、撮像素子)での画像寸法とから、次のように計算することができる。
M={f×(測定補助プレート26の実際の寸法)}/(撮像面上の画像寸法)
M={f×(測定補助プレート26の実際の寸法)}/(撮像面上の画像寸法)
頭部の前傾角度αは、次のようにして求めることができる。図15は、前記作業姿勢で作業位置Pを近方視している使用者の顔面を、作業位置Pから撮像した前記第1の画像における測定補助プレート26を模式的に示している。上述したように、使用者の近方視線は、その正面視方向から下方傾斜角度rだけ下向きに傾斜しているので、図15に実線で示される測定補助プレート26の外形形状は、その上辺が下辺より短い台形形状である。中央制御部43が画像上で検出して認識している台形の4つの頂点A、B、C、Dの各座標位置をそれぞれ(X1、Y1)、(X2、Y2)、(X3、Y3)及び(X4、Y4)とする。
ここで、その平面を作業位置Pに対して真正面に向けた仮想の測定補助プレート26’が、その中心点Oを実際の測定補助プレート26の中心点と一致させて配置されている、と仮定する。図15には、かかる仮想の測定補助プレート26’が破線で示されている。このとき、中心点Oにおける実際及び仮想の測定補助プレート26,26’の横幅寸法は、一致する。測定補助プレート26’の4つの頂点A’、B’、C’、D’の各座標位置をそれぞれ(X1’、Y1’)、(X2’、Y2’)、(X3’、Y3’)及び(X4’、Y4’)とする。コンピューター23には、予め測定補助プレート26の実寸法が入力されているので、それに基づいて中央制御部43は、頂点A’、B’、C’、D’の座標位置を算出することができる。
従って、前記第1の画像に示される測定補助プレート26の台形の高さ寸法a、上辺寸法b1、底辺寸法b2は、次のように表わされる。
a=Y1+Y3
b1=X1+X2
b2=X3+X4
また、前記第1の画面における元の矩形での測定補助プレート26の縦辺の寸法a´及び横辺の寸法b´は、次のように表わされる。
a´=Y1´+Y3´
b´=X1´+X2´
a=Y1+Y3
b1=X1+X2
b2=X3+X4
また、前記第1の画面における元の矩形での測定補助プレート26の縦辺の寸法a´及び横辺の寸法b´は、次のように表わされる。
a´=Y1´+Y3´
b´=X1´+X2´
これらの寸法値b1、b2、a´及びb´を用いて、前傾角度αを次式から求めることができる。ここで、Mは、作業位置Pから測定補助プレート26の中心点Oまでの直線距離である。
α=sin−1{(1/b1−1/b2)×b´/a´×M}
この計算式について、以下に説明する。
α=sin−1{(1/b1−1/b2)×b´/a´×M}
この計算式について、以下に説明する。
図16は、前記作業姿勢で作業位置Pを見ている使用者が装用しているフレーム25の測定補助プレート26を真上から平面視した図であり、図17は、該測定補助プレートを右側方から見た図である。
(1)図17で、測定補助プレート26を前傾させたとき、寸法a´の縦辺が傾斜した状態での水平寸法をΔLとすると、前傾角度αは次で表される。
α=sin−1(ΔL/a´)
(2)ここで、a´は既知であるから、ΔLを測定補助プレート26の中心点OでΔL1とΔL2とに分割すると、次の関係が成立する(図16)。
tanθ1=(b1/2)/N=(b´/2)/(N+ΔL1)
∴ΔL1=(b´/b1−1)×M
tanθ2=(b2/2)/N=(b´/2)/(N−ΔL2)
∴ΔL2=(1−b´/b2)×N
(3)従って、ΔLは、次のように求められる。
ΔL=ΔL1+ΔL2
={(b´/b1−1)+(1−b´/b2)}×N
={(1/b1−1/b2)×b´×N}
(4)これにより、前傾角度αを求める上記(1)の式は、以下の通り成立する。
α=sin−1(ΔL/a)
=sin−1{(1/b1−1/b2)×b´/a´×N}
(1)図17で、測定補助プレート26を前傾させたとき、寸法a´の縦辺が傾斜した状態での水平寸法をΔLとすると、前傾角度αは次で表される。
α=sin−1(ΔL/a´)
(2)ここで、a´は既知であるから、ΔLを測定補助プレート26の中心点OでΔL1とΔL2とに分割すると、次の関係が成立する(図16)。
tanθ1=(b1/2)/N=(b´/2)/(N+ΔL1)
∴ΔL1=(b´/b1−1)×M
tanθ2=(b2/2)/N=(b´/2)/(N−ΔL2)
∴ΔL2=(1−b´/b2)×N
(3)従って、ΔLは、次のように求められる。
ΔL=ΔL1+ΔL2
={(b´/b1−1)+(1−b´/b2)}×N
={(1/b1−1/b2)×b´×N}
(4)これにより、前傾角度αを求める上記(1)の式は、以下の通り成立する。
α=sin−1(ΔL/a)
=sin−1{(1/b1−1/b2)×b´/a´×N}
このように、本実施形態によれば、前傾角度αと角度βとを求めることができるので、下方傾斜角度rは、次式に従って算出することができる。
r=β−α
r=β−α
次に、左右ルーペの内側傾斜角度p、qは、次のように求められる。図18において、使用者の右眼瞳孔中心位置QR及び左眼瞳孔位置QLから測定補助プレート26の中心点CまでのX方向(水平方向)の距離をそれぞれXR、XLとする。これらX方向の距離XR、XLは、使用者が顔を正面を向けた状態でも、そこから下に向けて状態でも同じである。
コンピューター23は、上述した左右瞳孔中心位置の座標から、距離XR及びXLを算出することができる。従って、左右ルーペの内側傾斜角度は次の通りである。
p=tan−1(M/XR)
q=tan−1(M/XL)
p=tan−1(M/XR)
q=tan−1(M/XL)
次に、キャリアレンズ4における左右ルーペの取付位置を決定する。左右ルーペの取付位置は、以下に説明するように、測定補助プレート26における左右瞳孔中心位置を求めることによって、決定される。測定補助プレート26における左右瞳孔中心位置は、前記第1の撮影により撮像された第1の画像と、前記第2の撮影により撮像された第2の画像とを、コンピューター23で演算処理することによって算出される。
図19は、前記第1の画像における測定補助プレート26を模式的に示している。同図には、前記第1の撮影において作業姿勢で作業位置Pを注視している、即ち近方視状態にある使用者の左右瞳孔中心QNL1、QNR1が、該測定補助プレートの枠内に示されている。ここで、コンピューター23は、左右瞳孔中心QNL1、QNR1が測定補助プレート26の平面上で認識されるものとして取り扱う。
従来技術に関連して上述したように、一般に人の顔は左右対称でないから、左右両眼が同じ高さ(即ち、水平)になっていても、実際には図示するように、フレーム25は左右に傾いている場合が多い。そこで、本実施形態では、両眼が水平で、フレーム25が左右に傾いていることを前提として、画像データをコンピューター23で処理し、左右瞳孔中心QNL1、QNR1の位置を算出する。このことは、後述する第2の撮影による第2の画像の処理においても、同様である。
また、撮影する際のカメラ22の設置状態によって、実際には使用者の両眼が水平であっても、画像上の左右瞳孔中心QNL1、QNR1が同じ高さでない場合がある。そのような場合、本実施形態では、コンピューター23の画面上に表示された画像を面内で回転させて、左右瞳孔中心QNL1、QNR1が同じ高さになるように修正し、その後に画像データを処理を行う。このことも、後述する第2の撮影による第2の画像も、同様に取り扱う。
図19において、左右瞳孔中心QNL1、QNR1を通過する水平方向の直線即ち瞳孔線に平行な水平軸とそれに直交する垂直軸とからなる直交座標をu1v1座標系とする。更に、フレーム25の左右の傾きに対応した横軸とそれに直交する縦軸とからなる直交座標をx1y1座標系とする。図示するように、x1y1座標系は、u1v1座標系を角度φ1だけ回転させたものである。
図19における測定補助プレート26は、フレーム25が左右に傾いていても、図15に関連して上述したように、上辺が下辺より短い台形形状で表示される。コンピューター23は、この台形の4つの頂点A1,B1,C1,D1及び左右瞳孔中心QNL1、QNR1を認識し、それらの座標位置を、画面上で設定したu1v1座標系のスケールに基づいて、次のように決定する。
A1=(UA1,VA1)
B1=(UB1,VB1)
C1=(UC1,VC1)
D1=(UD1,VD1)
QNL1=(UQNL1,VQNL1)
QNR1=(UQNR1,VQNR1)
A1=(UA1,VA1)
B1=(UB1,VB1)
C1=(UC1,VC1)
D1=(UD1,VD1)
QNL1=(UQNL1,VQNL1)
QNR1=(UQNR1,VQNR1)
更にコンピューター23は、図19の画面上で、前記瞳孔線が台形の測定補助プレート26の両側辺とそれぞれ交差する2点HL1,HR1の中点M1を認定し、前記瞳孔線に中点M1から立てた垂線Lvが台形の測定補助プレート26の上下各辺とそれぞれ交差する2点MT1,MB1を認定し、それらのu1v1座標系の座標位置を、u1v1座標系のスケールに基づいて次のように決定する。
M1=(UM1,VM1)
MT1=(UMT1,VMT1)
MB1=(UBT1,VBT1)
M1=(UM1,VM1)
MT1=(UMT1,VMT1)
MB1=(UBT1,VBT1)
ここで、図19の平面画像で台形形状に射影される前の、即ち実際の矩形の測定補助プレート26について考える。この場合、台形の測定補助プレート26は、図20に示すように、前記瞳孔線を回転中心軸として、実際の矩形の測定補助プレート26”を、その上辺を後側にかつ下辺を前側に下方傾斜角度rだけ回転させたものの射影画像と考えることができる。従って、左右瞳孔中心QNL1、QNR1の座標位置は、台形の測定補助プレート26と、実際の矩形の測定補助プレート26”とのいずれにおいても同じである。図20において、符号Lp1は、同図中台形(A1B1C1D1)の測定補助プレート26の平面に中点M1から作業位置Pに向けて立てた垂線であり、符号Lp12は、同図中矩形(A12B12C12D12)の測定補助プレート26”の平面に中点M1から立てた垂線である。
そこで、本実施形態では、図19の平面画像で認識される台形の測定補助プレート26の4つの頂点A1,B1,C1,D1の座標位置と、それを三次元的に回転させた実際の矩形の測定補助プレート26”の4つの頂点A12,B12,C12,D12の座標位置との関係を、コンピューター23により演算可能な形にして導出する。これにより、図19では台形の測定補助プレート26上の点である左右瞳孔中心QNL1、QNR1の座標位置を、矩形の測定補助プレート26”上の点に変換することができる。
図21は、前記第2の画像における測定補助プレート26を模式的に示している。同図には、前記第2の撮影において頭部を真直ぐ立てた直立状態で、正面を遠方視している使用者の、測定補助プレート26の平面上で認識される左右瞳孔中心QFL、QFRが、該測定補助プレートの枠内に示されている。図21に示す第2の画像は、前記第1の画像と同様に、左右瞳孔中心QFL、QFRを通る直線である瞳孔線が水平に配向されている。
前記第2の画像は、フレーム25を真正面から撮像しているので、図21に記載されている測定補助プレート26は矩形である。同図において、左右瞳孔中心QFL、QFRを通過する瞳孔線に平行な水平軸とそれに直交する垂直軸とからなる直交座標をu2v2座標系とする。更に、フレーム25の上下辺に平行な横軸と左右側辺に平行な縦軸とからなる直交座標をx2y2座標系とする。図示するように、x2y2座標系は、u2v2座標系を角度φ2だけ回転させたものである。
コンピューター23は、測定補助プレート26の4つの頂点A2,B2,C2,D2及び左右瞳孔中心QFL、QFRを認識し、それらのu2v2座標系における座標位置を、画面上で設定したu2v2座標系のスケールに基づいて、次のように決定する。
A2=(UA2,VA2)
B2=(UB2,VB2)
C2=(UC2,VC2)
D2=(UD2,VD2)
QFL=(UQFL,VQFL)
QFR=(UQFR,VQFR)
A2=(UA2,VA2)
B2=(UB2,VB2)
C2=(UC2,VC2)
D2=(UD2,VD2)
QFL=(UQFL,VQFL)
QFR=(UQFR,VQFR)
x2y2座標系における各頂点A2,B2,C2,D2及び左右瞳孔中心QFL、QFRの座標位置は、次のように表される。
A2=(XA2,YA2)
B2=(XB2,YB2)
C2=(XC2,YC2)
D2=(XD2,YD2)
QFL=(XQFL,YQFL)
QFR=(XQFR,YQFR)
A2=(XA2,YA2)
B2=(XB2,YB2)
C2=(XC2,YC2)
D2=(XD2,YD2)
QFL=(XQFL,YQFL)
QFR=(XQFR,YQFR)
これらx2y2座標系の各座標位置は、上述したu2v2座標系の座標位置を、例えば次の行列式を用いて座標変換することによって、コンピューター23により算出される。ここで、角度φ2は、上述したように、u2v2座標からx2y2座標への回転角である。

従って、例えば頂点A2を基準点とすると、遠方視における左右瞳孔中心QFL、QFRの位置は次のように算出される。
QFL=(XQFL−XA2,YQFL−YA2)
QFR=(XQFR−XA2,YQFR−YA2)
QFL=(XQFL−XA2,YQFL−YA2)
QFR=(XQFR−XA2,YQFR−YA2)
例えば、頂点A2及びB2の座標位置から、図21の画像上における測定補助プレート26の上辺(下辺)の長さが算出される。実際の測定補助プレート26の上辺長さは予め分かっているから、図21における測定補助プレート26の縮尺が算出される。従って、実際の測定補助プレート26上における左右瞳孔中心QFL、QFRの位置を、上述した図21における各座標位置から決定することができる。
図19における台形の測定補助プレート26上の左右瞳孔中心QNL1、QNR1の座標位置を、同図上で矩形の測定補助プレート26”上の点に変換する方法について、以下に説明する。
或る実施形態では、前記瞳孔線(HR1HL1)を回転中心軸として、実際の矩形の測定補助プレート26”を逆向きに、即ちその上辺を前側にかつ下辺を後側に下方傾斜角度rだけ、台形の測定補助プレート26と同じ平面まで回転させた、と仮定する。図19には、このように仮定した仮想の矩形の測定補助プレート26”が破線で記載されている。この仮想の矩形の測定補助プレート26”は、その平面を作業位置Pに対して真正面に向け、台形の測定補助プレート26と前記瞳孔線を一致させて重ね合わせた形で配置されている。図示するように、前記瞳孔線が仮想の矩形の測定補助プレート26”の両側辺と交差する点は、台形の測定補助プレート26の両側辺上の点HL1,HR1と一致する。
次に、コンピューター23は、垂線Lv上の2点Mt1,M1間の長さh1a、及び2点M1,Mb1間の長さh1bを、画面上のスケールに基づいて決定し、その比h1a:h1b=mを計算する。更にコンピューター23は、垂線Lvが仮想の矩形の測定補助プレート26”の上下各辺と交差する2点をMt12,Mb12とすると、それらと中点M1との間の長さh12a、h12bの比は、h1a、h1bと同様に、mである。
2点Mt12,Mb12間の長さh12は、図21の測定補助プレート26に対する図19の測定補助プレート26”の縮尺から計算できる。図21のu2v2座標系における測定補助プレート26の上下辺間の長さh2、及び左右側辺間の長さw2は、u2v2座標からx2y2座標への回転角θを用いて容易に算出される。従って、水平方向の長さw2とw1との比に基づいて、長さh2から長さh12が容易に算出される。
これにより、図19の測定補助プレート26”の上下辺上の点Mt1,Mb1の座標位置が算出される。このように算出したu1v1座標系の両点Mt1,Mb1、中点M1、及び近方視における左右瞳孔中心QNL1、QNR1の座標位置を、x1y1座標系の座標位置に変換する。これらの座標変換は、下記の数2の行列式を用いて簡単に行うことができる。
座標変換後のMt1,Mb1、M1の座標位置から、x1y1座標系におけるA1,B1,C1,D1の座標位置を簡単に算出することができる。従って、例えば頂点A1を基準点とすると、近方視における左右瞳孔中心QNL1、QNR1の測定補助プレート26”上の位置は次のように算出される。
QNL1=(XQFL−XA1,YQFL−YA1)
QNR1=(XQFR−XA1,YQFR−YA1)
更に、実際の測定補助プレート26に対する図19の測定補助プレート26”の縮尺が予め分かっているので、これら瞳孔中心QNL1、QNR1の座標から、実際の測定補助プレート26上の近方視における左右瞳孔中心位置を決定することができる。
QNL1=(XQFL−XA1,YQFL−YA1)
QNR1=(XQFR−XA1,YQFR−YA1)
更に、実際の測定補助プレート26に対する図19の測定補助プレート26”の縮尺が予め分かっているので、これら瞳孔中心QNL1、QNR1の座標から、実際の測定補助プレート26上の近方視における左右瞳孔中心位置を決定することができる。
別の実施形態では、図19の平面画像で台形形状に射影される前の、実際の矩形の測定補助プレート26を、同図の台形における4頂点のA1,B1,C1,D1から、コンピューター23のソフトウエア上で三次元画像に再構成する。これによって、図19上の瞳孔中心QNL1、QNR1の座標位置を、直接三次元画像上の、即ち実際の矩形の測定補助プレート26”上の座標位置に変換することができる。
この座標変換は、例えば次のように実行される。最初に、図19の撮像画像から、台形をなす測定補助プレート26の4頂点のA1,B1,C1,D1と、瞳孔中心QNL1、QNR1の座標位置を求める。これらの座標位置は、例えば画面を構成する画素(pixel)数に基づいて決定することができる。
実際の測定補助プレート26を真正面から矩形に見たときの、測定補助プレート26の4頂点A1,B1,C1,D1の座標位置は、該測定補助プレートの実寸法から予め分かっている。そこで、所謂ピンカメラモデルにおいて、3次元座点を画像平面に射影する透視投影変換を行う公知の関数を用いて、正面を向いた測定補助プレート26の矩形画像を図19の台形画像に変換する変換行列Tを求める。次に、この変換行列の逆変換行列T-1を求める。この逆変換行列を用いて、図19の台形の測定補助プレート26における瞳孔中心QNL1、QNR1の座標位置から、それらの正面を向いた矩形の測定補助プレート26”における座標位置を算出する。
このような公知の関数として、例えば「findHomography関数」が知られている。次の数3は、findHomography関数を用いて表される、第1の画像平面の座標(u1,v1)と、これに射影される前の三次元座標において測定補助プレート26”を含む平面の座標(u’,v’)との関係式である。
当然ながら、本発明によれば、3次元座点を画像平面に射影する透視投影変換を行う関数であれば、上記findHomography関数以外の様々な関数又は計算式を用いることができる。
更に、別の実施形態によれば、このように算出された矩形の測定補助プレート26”の各頂点の座標位置と台形の測定補助プレート26の各頂点の座標位置とに基づいて、図20において測定補助プレート26”を含む平面と台形の測定補助プレート26を含む平面との、前記瞳孔線(HR1HL1)を中心とする回転角をコンピューター23により算出することができる。この回転角は、下方傾斜角度rに一致する。
図20において測定補助プレート26” を含む平面の座標(u’,v’)と、これを前記瞳孔線(HR1HL1)を中心として角度r回転させた第1の画像平面の座標(u1,v1)との間には、次の数4の関係式が成立する。
従って、測定補助プレート26”の各頂点の座標位置と台形の測定補助プレート26の各頂点の座標位置とから、上記数4におけるsinr又はcosrを算出することによって、角度rが得られる。
ステップS6では、キャリアレンズ4にルーペ取付孔を加工するために、例えばNC加工機を使用する。前記NC加工機には、予めルーペ取付孔加工プログラムが記憶されており、ステップS4及びS5で決定した下方傾斜角度r、内側傾斜角度p,q、及びキャリアレンズ4上のルーペ取付位置を入力し、フレーム25を所定位置に設置すると、自動的にキャリアレンズ4が孔加工されて、ルーペ取付孔が所望の位置及び向きに正確に形成される。
ステップS7では、図2に示す取付アダプター11とルーペ固定リング12とからなる取付部6を用いて、左右ルーペをそれぞれキャリアレンズに固定することができる。図2を参照して説明すると、先ず、取付アダプター11をキャリアレンズ4のルーペ取付孔10内に、キャリアレンズ4の裏側(使用者の顔面側)から挿入して固定する。図2(a)に示すように、ルーペ取付孔10の内周縁には複数(図示する実施形態では、2つ)の切欠き10aが形成されており、これに取付アダプター11外周面の対応する突部11aをそれぞれ嵌合させる。取付アダプター11は、このように装着することによって、キャリアレンズ4に対して、その中心軸線が下方傾斜角度r及び内側傾斜角度p,qと整合するように配置することができる。
ルーペ5は、その後端部(接眼レンズ側)から取付アダプター11の貫通孔内に挿入され、該後端部外周のねじ部に、キャリアレンズ4裏側から挿入したルーペ固定リング12を螺合させることによって、キャリアレンズ4に固定される。このとき、ルーペ5は、その光軸が下方傾斜角度r及び内側傾斜角度p,qと整合するように調整して、ルーペ固定リング12を締着させることによって、より高い精度でキャリアレンズ4の所望の位置に所望の角度で固定することができる。ルーペ5の前記光軸調整には、例えばレーザー光を用いた位置決め装置や他の公知の位置決め手段を用いることができる。
別の実施形態では、下方傾斜角度r及び内側傾斜角度p,qを調整したルーペ5を接着剤により、ルーペ取付孔10に直接又は取付アダプター11を介して固定することができる。また、ルーペ5をキャリアレンズ4に取付位置及び向きを調整して固定するために、他の様々な公知の取付手段を用いることができる。
本発明は、上述した実施形態のレンズ嵌込型だけでなく、従来技術に関連して説明したクリップやアームを用いる前掛け式やヘッドバンド型等、他のタイプ又は構造の双眼ルーペ装置にも、同様に適用することができる。前掛け式又はヘッドバンド型の場合、ルーペを保持するアーム等の位置に測定補助プレート26を、その平面が使用者の正面視方向と直交する向きに配置する。これにより、上記実施形態と同様に、ルーペ取付位置決定システム21のカメラ22を用いて撮像した画像のデータをコンピューター23で処理することによって、下方傾斜角度r及び内側傾斜角度p,qを算出し、ルーペ取付位置を決定することができる。この場合、本発明によって決定される測定補助プレート26上の瞳孔位置が、実際のルーペ取付位置となる。
以上、本発明をその好適な実施形態に関連して詳細に説明したが、本発明は上記実施形態に限定されるものでなく、その技術的範囲において、様々な変更又は変形を加えて実施し得ることは言うまでもない。例えば、使用者が普段通常の視力矯正用眼鏡を使用している場合、該視力矯正用レンズの上から双眼ルーペ装置を装用するのであれば、キャリアレンズ4には、プラノレンズ(度の入っていないレンズ)を用いる。視力矯正用レンズを外して双眼ルーペ装置を装用するのであれば、キャリアレンズ4には、度付きレンズを使用することができる。この場合、度付きレンズの遠方視位置は、上記ステップS5で撮像される前記第2の画像を用いて測定した瞳孔位置QFL、QFRに基づいて設定することができる。
1 双眼ルーペ装置
2 フレーム
4 キャリアレンズ
5 ルーペ
6 取付部
10 ルーペ取付孔
21 ルーペ取付位置決定システム
22 カメラ
23 コンピューター
25 フレーム
26 測定補助プレート
53 枠線
2 フレーム
4 キャリアレンズ
5 ルーペ
6 取付部
10 ルーペ取付孔
21 ルーペ取付位置決定システム
22 カメラ
23 コンピューター
25 フレーム
26 測定補助プレート
53 枠線
Claims (28)
- 使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応する左右1対のルーペを所定の位置に取り付けるために使用する補助具であって、
透明かつ平坦な概ね矩形のプレート部材からなり、
前記プレート部材が該プレート部材を前記保持具に取外可能に固定するための取付部を有し、
前記プレート部材は、前記取付部によって前記プレート部材を固定した前記保持具を使用者の頭部又は顔部に装着した状態で、近方視している前記使用者の顔部を該使用者の左右眼の近方視線上の作業位置から見たとき、前記左右眼の瞳孔が前記プレート部材の平面内に位置するような大きさを有する、ことを特徴とするルーペ取付用補助具。 - 前記取付部は、前記プレート部材を、その平面が前記保持具を装着した前記使用者の遠方視線に関して直交するように、前記保持具に固定するようになっている、ことを特徴とする請求項1に記載のルーペ取付用補助具。
- 前記プレート部材は、その周縁に沿って設けられた概ね矩形の枠線を有する、ことを特徴とする請求項1又は2に記載のルーペ取付用補助具。
- 前記枠線が、その周囲よりも高い光反射率を有する、ことを特徴とする請求項3に記載のルーペ取付用補助具。
- 前記枠線が白色又は淡色である、ことを特徴とする請求項3又は4に記載のルーペ取付用補助具。
- 使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応して取り付けられる左右1対のルーペの取付位置を決定するための方法であって、
請求項1乃至5のいずれか記載のルーペ取付用補助具を取り付けた前記保持具を準備する過程と、
前記保持具を使用者の頭部又は顔部に装着した状態で、近方視している前記使用者の顔部を該使用者の前記左右眼の近方視線上の作業位置から撮像して、前記ルーペ取付用補助具の前記プレート部材全体及び該プレート部材の平面内に前記使用者の近方視における左右瞳孔を含むように第1の画像を取得する過程と、
前記第1の画像上で前記プレート部材の頂点及び前記近方視における左右瞳孔の座標位置を測定する過程と、
測定した前記プレート部材の頂点及び前記左右瞳孔の座標位置に基づいて、前記作業位置に向けられた前記使用者の近方視線が前記プレート部材を通過する点の座標を演算することにより、前記プレート部材の平面における前記ルーペの取付位置及び/又は取付角度を決定する過程とを含む、ことを特徴とするルーペ取付位置決定方法。 - 前記ルーペの取付位置を決定する過程において、前記第1の画像上で、前記左右瞳孔の中心を通過する直線を回転中心軸として、その平面が真正面を向くように前記プレート部材を回転させた、前記第1の画像の平面に射影される前の仮想のプレート部材の頂点の座標位置を、前記測定した前記プレート部材の頂点の座標位置に基づいて算出し、算出した前記仮想のプレート部材の頂点の座標位置に基づいて前記プレート部材の平面における前記ルーペの取付位置を決定する、ことを特徴とする請求項6に記載のルーペ取付位置決定方法。
- 前記保持具を使用者の頭部又は顔部に装着した状態で、遠方視している前記使用者の顔部を正面から撮像して、前記プレート部材の全体及び該プレート部材の平面内に前記使用者の遠方視における左右瞳孔を含むように第2の画像を取得する過程と、
前記第2の画像上で前記プレート部材の頂点及び前記遠方視における左右瞳孔の座標位置を測定する過程とを更に含む、ことを特徴とする請求項7に記載のルーペ取付位置決定方法。 - 前記ルーペの取付位置を決定する過程において、前記測定したプレート部材の頂点の座標位置と前記プレート部材の実寸法とに基づいて、前記第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置から前記第1の画像の平面における前記プレート部材の前記頂点の座標位置に変換するための変換行列を求め、前記変換行列の逆変換行列を用いて、前記プレート部材の前記平面における前記頂点の座標位置から前記三次元座標位置を算出する、ことを特徴とする請求項6に記載のルーペ取付位置決定方法。
- 前記ルーペの取付角度を決定する過程において、前記使用者の遠方視線に関する前記近方視線の下方傾斜角度及び/又は内側傾斜角度を決定する、ことを特徴とする請求項6乃至9のいずれかに記載のルーペ取付位置決定方法。
- 前記作業位置から前記プレート部材の平面までの直線距離と水平距離とを測定し、前記直線距離及び水平距離と前記使用者の頭部の前傾角度とに基づいて、前記下方傾斜角度を決定する、ことを特徴とする請求項10に記載のルーペ取付位置決定方法。
- 前記第1の画像における前記プレート部材の前記頂点の座標位置と前記第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置とに基づいて、前記第1の画像における前記プレート部材を含む平面と前記第1の画像の平面に射影される前のプレート部材を含む平面との回転角を算出することにより、前記下方傾斜角度を決定する、ことを特徴とする請求項10に記載のルーペ取付位置決定方法。
- 前記作業位置から前記プレート部材の平面までの直線距離と、前記プレート部材の平面上における前記使用者の前記左右瞳孔の内寄せ量とを測定し、それらに基づいて前記左右眼の各内側傾斜角度を決定する、ことを特徴とする請求項10に記載のルーペ取付位置決定方法。
- 前記保持具が、前記使用者の顔部に装着されるフレームと、前記フレームに装着されるキャリアレンズとからなり、前記ルーペが前記キャリアレンズに取り付けられる、ことを特徴とする請求項6乃至13のいずれかに記載のルーペ取付位置決定方法。
- 前記保持具が、前記使用者の顔部に装着されるフレームと、前記フレームから正面前方に延出する支持部とからなり、前記ルーペが前記支持部により支持される、ことを特徴とする請求項6乃至13のいずれかに記載のルーペ取付位置決定方法。
- 前記保持具が、前記使用者の頭部に装着されるヘッドバンドと、前記ヘッドバンドから正面前方に延出する支持部とからなり、前記ルーペが前記支持部により支持される、ことを特徴とする請求項6乃至13のいずれかに記載のルーペ取付位置決定方法。
- 使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応して取り付けられる左右1対のルーペの取付位置を決定するためのシステムであって、
カメラと、
前記カメラが撮像した画像を処理するための演算処理装置とからなり、
前記演算処理装置は、前記カメラが、請求項1乃至5のいずれか記載のルーペ取付用補助具を取り付けた前記保持具を使用者の頭部又は顔部に装着した状態で、近方視している前記使用者の顔部を該使用者の前記左右眼の近方視線上の作業位置から撮像することにより、前記ルーペ取付用補助具の前記プレート部材全体及び該プレート部材の平面内に前記使用者の近方視における左右瞳孔を含むように取得した第1の画像を演算処理して、前記第1の画像上で前記プレート部材の頂点及び前記近方視における左右瞳孔の座標位置を測定し、測定した前記プレート部材の頂点及び前記左右瞳孔の座標位置に基づいて、前記作業位置に向けられた前記使用者の近方視線が前記プレート部材を通過する点の座標を演算して、前記プレート部材の平面における前記ルーペの取付位置及び/又は取付角度を決定する機能を有する、ことを特徴とするルーペ取付位置決定システム。 - 前記演算処理装置は、前記第1の画像上で、前記左右瞳孔の中心を通過する直線を回転中心軸として、その平面が真正面を向くように前記プレート部材を回転させた、前記第1の画像の平面に射影される前の仮想のプレート部材の頂点の座標位置を、前記測定した前記プレート部材の頂点の座標位置に基づいて算出し、算出した前記仮想のプレート部材の頂点の座標位置に基づいて前記プレート部材の平面における前記ルーペの取付位置を決定する、ことを特徴とする請求項17に記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記カメラが、前記保持具を使用者の頭部又は顔部に装着した状態で、遠方視している前記使用者の顔部を正面から撮像して、前記プレート部材の全体及び該プレート部材の平面内に前記使用者の遠方視における左右瞳孔を含むように取得した第2の画像を処理し、前記第2の画像上で前記プレート部材の頂点及び前記遠方視における左右瞳孔の座標位置を測定する、ことを特徴とする請求項18に記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記測定したプレート部材の頂点の座標位置と前記プレート部材の実寸法とに基づいて、前記第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置から前記第1の画像の平面における前記プレート部材の前記頂点の座標位置に変換するための変換行列を求め、前記変換行列の逆変換行列を用いて、前記プレート部材の前記平面における前記頂点の座標位置から前記三次元座標位置を算出する、ことを特徴とする請求項17に記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記使用者の遠方視線に関する前記近方視線の下方傾斜角度及び/又は内側傾斜角度を決定する、ことを特徴とする請求項17乃至20のいずれかに記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記作業位置から前記プレート部材の平面までの直線距離及び水平距離と前記使用者の頭部の前傾角度とに基づいて、前記下方傾斜角度を決定する、ことを特徴とする請求項21に記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記第1の画像における前記プレート部材の前記頂点の座標位置と前記第1の画像の平面に射影される前のプレート部材の頂点の三次元座標位置とに基づいて、前記第1の画像における前記プレート部材を含む平面と前記第1の画像の平面に射影される前のプレート部材を含む平面との回転角を算出することにより、前記下方傾斜角度を決定する、ことを特徴とする請求項21に記載のルーペ取付位置決定システム。
- 前記演算処理装置は、前記作業位置から前記プレート部材の平面までの直線距離と、前記プレート部材の平面上における前記使用者の前記左右瞳孔の内寄せ量とに基づいて、前記左右眼の各内側傾斜角度を決定する、ことを特徴とする請求項21に記載のルーペ取付位置決定システム。
- 使用者の頭部又は顔部に装着される保持具に関して前記使用者の左右眼に対応して取り付けられる左右1対のルーペを備えた双眼ルーペ装置の組立方法であって、
請求項6乃至13のいずれかに記載のルーペ取付位置決定方法により、前記ルーペを前記保持具に関して取り付ける取付位置及び/又は取付角度を決定する過程と、
前記保持具に関して前記ルーペを前記決定された取付位置及び/又は取付角度に取り付ける過程とを含む、ことを特徴とする双眼ルーペ装置の組立方法。 - 前記保持具が、前記使用者の顔部に装着されるフレームと、前記フレームに装着されるキャリアレンズとからなり、前記ルーペを前記キャリアレンズに取り付ける、ことを特徴とする請求項25に記載の双眼ルーペ装置の組立方法。
- 前記保持具が、前記使用者の顔部に装着されるフレームと、前記フレームから正面前方に延出する支持部とからなり、前記ルーペを前記支持部に支持されるように取り付ける、ことを特徴とする請求項25に記載の双眼ルーペ装置の組立方法。
- 前記保持具が、前記使用者の頭部に装着されるヘッドバンドと、前記ヘッドバンドから正面前方に延出する支持部とからなり、前記ルーペを前記支持部に支持されるように取り付ける、ことを特徴とする請求項25に記載の双眼ルーペ装置の組立方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105295A JP2018200411A (ja) | 2017-05-29 | 2017-05-29 | 双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105295A JP2018200411A (ja) | 2017-05-29 | 2017-05-29 | 双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018200411A true JP2018200411A (ja) | 2018-12-20 |
Family
ID=64667175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017105295A Pending JP2018200411A (ja) | 2017-05-29 | 2017-05-29 | 双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018200411A (ja) |
-
2017
- 2017-05-29 JP JP2017105295A patent/JP2018200411A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9335567B2 (en) | Method for manufacturing binocular loupe | |
| US20180348542A1 (en) | Loupe mounting position determination method in binocular loupe device, and system | |
| EP1714184B1 (en) | Custom eyeglass manufacturing method | |
| US7845797B2 (en) | Custom eyeglass manufacturing method | |
| JP6833674B2 (ja) | 選択された眼鏡フレームの画像データに基づいた使用者データの決定 | |
| JP5013930B2 (ja) | 眼鏡装用パラメータ測定装置及び眼鏡装用パラメータ測定方法 | |
| JP6236313B2 (ja) | ブロック装置、眼鏡レンズの製造方法およびプログラム | |
| JP6953563B2 (ja) | 光学パラメータを決定するための装置および方法 | |
| JP5311601B1 (ja) | 双眼ルーペの製作方法 | |
| US9928421B2 (en) | Method for helping determine the vision parameters of a subject | |
| EP3270099B1 (en) | Measurement device for eyeglasses-wearing parameter, measurement program for eyeglasses-wearing parameter, and position designation method | |
| GB2559978A (en) | Systems and methods for obtaining eyewear information | |
| JP4536329B2 (ja) | アイポイントの位置決定方法及びアイポイント測定システム | |
| JP2014042806A (ja) | 注視線測定方法、注視線測定装置、眼球回旋点測定方法及びアイポイント測定装置 | |
| JP2007093636A (ja) | 眼鏡装用パラメータ測定装置、眼鏡レンズ及び眼鏡 | |
| US7219995B2 (en) | Apparatus for determining the distance between pupils | |
| JP5652973B1 (ja) | 双眼ルーペの製作方法 | |
| JP2018200411A (ja) | 双眼ルーペ装置のルーペ取付位置決定方法並びにシステム、ルーペ取付用補助具、及び双眼ルーペ装置の組立方法 | |
| BR112016011938B1 (pt) | processo de biselamento de uma lente oftálmica | |
| JP6433258B2 (ja) | 双眼ルーペの製作方法 | |
| JP6338042B2 (ja) | 眼鏡パラメータ演算装置、眼鏡パラメータ演算プログラム | |
| EP1832388B1 (en) | Equipment for capturing the contour, markings, bores, millings and etchings of an ophthalmic lens or template lens for glasses | |
| JP2016167038A (ja) | 眼鏡装用パラメータ測定装置、眼鏡装用パラメータ測定プログラムおよび撮像制御方法 | |
| KR102299051B1 (ko) | 안경렌즈 처방을 위한 3차원 매개변수 측정 장치 및 방법 | |
| US10649200B2 (en) | Production method for binocular loupe |