JP2018182278A - Pick-up apparatus and implementation apparatus for semiconductor chip - Google Patents
Pick-up apparatus and implementation apparatus for semiconductor chip Download PDFInfo
- Publication number
- JP2018182278A JP2018182278A JP2017148129A JP2017148129A JP2018182278A JP 2018182278 A JP2018182278 A JP 2018182278A JP 2017148129 A JP2017148129 A JP 2017148129A JP 2017148129 A JP2017148129 A JP 2017148129A JP 2018182278 A JP2018182278 A JP 2018182278A
- Authority
- JP
- Japan
- Prior art keywords
- push
- semiconductor chip
- adhesive sheet
- bodies
- pick
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Die Bonding (AREA)
Abstract
Description
本発明の実施形態は、半導体チップのピックアップ装置及び実装装置に関する。 Embodiments of the present invention relate to a pickup device and a mounting device of a semiconductor chip.
半導体チップをリードフレームや配線基板、インターポーザ基板等の基板上に実装するにあたって、半導体チップ毎に切断されて個片化された半導体ウエーハが粘着シートに貼着されたウエーハシートから、半導体チップを1つずつ取り出し、基板上に移送して実装することが行われている。ウエーハシートからの半導体チップの取り出しには、半導体チップを吸着する吸着ノズルを有するピックアップ機構と、吸着ノズルに吸着された半導体チップを下面側から突き上げピンで突き上げて、粘着シートからの半導体チップの剥離及び取り出しを補助する突き上げ機構とを備えるピックアップ装置が用いられている。 In mounting a semiconductor chip on a substrate such as a lead frame, a wiring substrate, an interposer substrate, etc., the semiconductor chip is cut from a wafer sheet in which the semiconductor wafer cut and singulated for each semiconductor chip is attached to an adhesive sheet It takes out one by one and transports and mounts on a substrate. To take out the semiconductor chip from the wafer sheet, pick up the pickup mechanism having the suction nozzle for suctioning the semiconductor chip and the semiconductor chip sucked by the suction nozzle from the bottom side and push it up with a pin to peel off the semiconductor chip from the adhesive sheet. And the pick-up apparatus provided with the pushing-up mechanism which assists taking-out is used.
ところで、最近の半導体チップは、その厚さが50μm以下というように薄厚化が進められている。そのように薄い半導体チップを単に突き上げピンで粘着シートを引き伸ばしながら突き上げた場合には、半導体チップが損傷するおそれが大きくなる。そこで、特許文献1に示されるように、半導体チップの下面に貼着された粘着シートの剥離が半導体チップの周辺部から中心部に向かって徐々に進行するように、軸線を一致させて同心的に設けられた複数の押し上げ体を有するピックアップ装置が開発されている。このようなピックアップ装置において、複数の押し上げ体がなす上面形状は、通常、ピックアップされる半導体チップと同等の形状、例えば四角形に形成されている。
Recent semiconductor chips are being reduced in thickness to 50 μm or less. When the thin semiconductor chip is simply pushed up while pushing up the adhesive sheet with a pin, the semiconductor chip may be damaged. Therefore, as disclosed in
上記したピックアップ装置においては、まず複数の押し上げ体を同時に所定の高さまで上昇させてピックアップされる半導体チップの下面全体を押圧して押し上げた後、最も外側に位置する突き上げ体を残し、他の突き上げ体を所定の高さまでさらに上昇させる。次いで、2番目の突き上げ体を残して他の突き上げ体を上昇させる。半導体チップの下面の突き上げ体による支持は、周辺部から中心部に向かって順次開放されるため、半導体チップが粘着テープから剥離しやすくなる。さらに、半導体チップの下面からの粘着テープの剥離を促進するために、少なくとも最外周に位置する押し上げ体の粘着テープとの接触面(上面)に、粘着テープとの間に吸引力が作用する凹部を設けることが提案されている。押し上げ体の上面に設けられた凹部は、粘着シートが半導体チップから剥離し始める箇所となるため、剥離テープの半導体チップからの剥離を促進することができる。 In the above-described pick-up apparatus, first, the plurality of push-up members are simultaneously raised to a predetermined height to press and push up the entire lower surface of the semiconductor chip to be picked up, leaving the push-out body located on the outermost side. Further raise the body to a predetermined height. Then, lift the other pusher leaving the second pusher. Since the support of the lower surface of the semiconductor chip by the push-up body is sequentially released from the peripheral portion toward the central portion, the semiconductor chip is easily peeled off from the adhesive tape. Furthermore, in order to promote the peeling of the adhesive tape from the lower surface of the semiconductor chip, a recess where suction force acts on the contact surface (upper surface) of the push-up body located at the outermost periphery with the adhesive tape at least It has been proposed to provide Since the recessed part provided in the upper surface of the push-up body becomes a location where the adhesive sheet starts to peel from the semiconductor chip, the peeling of the peeling tape from the semiconductor chip can be promoted.
しかしながら、上述したような複数の押し上げ体を有すると共に、少なくとも最外周に位置する押し上げ体の上面に凹部を設けたピックアップ装置を用いた場合においても、半導体チップに破損が生じる場合がある。半導体チップの破損の原因は明確ではないものの、厚さが例えば30μm以下というように薄厚化された半導体チップを粘着シートから剥離してピックアップする際に、半導体チップの破損が生じやすい。また、半導体チップに形成される回路も半導体チップの高容量化や高機能化等を図るために高密度化しており、そのような回路形状も半導体チップの破損の一因と考えられる。 However, even in the case of using a pickup apparatus having a plurality of push-up bodies as described above and at least the upper surface of the push-up body located at the outermost periphery, the semiconductor chip may be damaged. Although the cause of the damage of the semiconductor chip is not clear, when the semiconductor chip whose thickness is reduced to, for example, 30 μm or less is peeled off from the adhesive sheet and picked up, the semiconductor chip is easily damaged. In addition, circuits formed on a semiconductor chip are also densified in order to achieve high capacity and high functionality of the semiconductor chip, and such a circuit shape is also considered to be a cause of damage to the semiconductor chip.
例えば、NAND型フラッシュメモリ等のメモリチップにおいては、その厚さが年々薄厚化されており、上記したように30μm以下、さらに25μm以下、20μm以下というような厚さを有する半導体チップの実用化が進められている。このため、そのような薄厚化された半導体チップをピックアップする場合においても、半導体チップに破損を生じさせることなく、より確実に半導体チップを粘着シートから剥離してピックアップすることが可能なピックアップ装置が求められている。 For example, in a memory chip such as a NAND flash memory, the thickness thereof has been reduced year by year, and as described above, there has been commercialization of a semiconductor chip having a thickness of 30 μm or less, 25 μm or less, 20 μm or less. It is in progress. Therefore, even in the case of picking up such a thinned semiconductor chip, a pickup device capable of more reliably peeling off the semiconductor chip from the adhesive sheet and picking up the semiconductor chip without causing damage to the semiconductor chip is disclosed. It has been demanded.
本発明が解決しようとする課題は、例えば厚さが30μm以下というように薄厚化した半導体チップをピックアップする場合においても、半導体チップを破損させることなく粘着シートからピックアップすることを可能にした半導体チップのピックアップ装置及びそれを用いた実装装置を提供することにある。 The problem to be solved by the present invention is, for example, a semiconductor chip that enables picking up from a pressure-sensitive adhesive sheet without damaging the semiconductor chip even when picking up a semiconductor chip thinned to a thickness of 30 μm or less It is an object of the present invention to provide a pickup device and a mounting device using the same.
実施形態の半導体チップのピックアップ装置は、粘着シートに貼着させた四角形状の半導体チップを前記粘着シートからピックアップする半導体チップのピックアップ装置であって、前記粘着シートのピックアップされる前記半導体チップの周辺部分に対応する部分を吸着保持する吸着面が上面に設けられたバックアップ体と、軸心を同じにして互いに垂直方向に移動可能な状態で前記バックアップ体内に設けられた複数の押し上げ体を有し、前記複数の押し上げ体の前記粘着シートとの接触面は前記複数の押し上げ体が下降した状態で同一の平面を形成する押し上げ機構と、前記複数の押し上げ体を昇降駆動させる駆動機構であって、前記粘着シートの前記ピックアップされる半導体チップが貼着された部分の下面を押圧し、少なくとも前記粘着シートと共に前記半導体チップを前記バックアップ体の上面から押し上げることによって、前記粘着シートの前記半導体チップからの剥離を進行させる駆動機構と、前記粘着シートの剥離が進行した前記半導体チップを前記粘着シートからピックアップするピックアップ機構とを具備し、前記下降状態における前記複数の押し上げ体の前記粘着シートとの接触面により形成される前記平面の平面度が20μm以下である。 A pickup device for a semiconductor chip according to an embodiment is a pickup device for a semiconductor chip that picks up a square semiconductor chip attached to an adhesive sheet from the adhesive sheet, and the periphery of the semiconductor chip to be picked up by the adhesive sheet It has a backup body provided on the upper surface with an adsorption surface for adsorbing and holding a portion corresponding to the portion, and a plurality of push-up bodies provided in the backup body so as to move vertically with the same axis. The contact surfaces of the plurality of pushers with the adhesive sheet are a push-up mechanism that forms the same plane when the plurality of pushers are lowered, and a drive mechanism that raises and lowers the plurality of pushers. The lower surface of the portion of the adhesive sheet to which the semiconductor chip to be picked up is attached is pressed, A driving mechanism for promoting peeling of the adhesive sheet from the semiconductor chip by pushing up the semiconductor chip from the upper surface of the backup body together with the adhesive sheet, and the semiconductor chip in which the peeling of the adhesive sheet has progressed from the adhesive sheet And a pick-up mechanism for picking up, and the flatness of the plane formed by the contact surfaces of the plurality of push-up bodies with the adhesive sheet in the lowered state is 20 μm or less.
実施形態の半導体チップの実装装置は、半導体チップを供給する供給部と、基板を搬送する搬送部と、前記供給部から前記半導体チップを取り出すピックアップ部であって、実施形態のピックアップ装置を備えるピックアップ部と、前記ピックアップ部により取り出された前記半導体チップを、直接又は中間ステージを介して前記基板上に実装する実装部とを具備する。 A semiconductor chip mounting apparatus according to an embodiment is a supply unit for supplying a semiconductor chip, a transport unit for transporting a substrate, and a pickup unit for extracting the semiconductor chip from the supply unit, the pickup including the pickup device according to the embodiment And a mounting unit for mounting the semiconductor chip taken out by the pickup unit on the substrate directly or via an intermediate stage.
実施形態のピックアップ装置によれば、例えば厚さが30μm以下というように薄厚化された半導体チップであっても、半導体チップを破損させることなく粘着シートから確実にピックアップすることができる。さらに、そのようなピックアップ装置を用いた実装装置によれば、半導体チップの実装の歩留まりや信頼性を高めることができる。 According to the pickup device of the embodiment, even a semiconductor chip whose thickness is, for example, 30 μm or less can be reliably picked up from the adhesive sheet without damaging the semiconductor chip. Furthermore, according to the mounting apparatus using such a pickup device, the yield and reliability of mounting of the semiconductor chip can be enhanced.
以下、実施形態の半導体チップのピックアップ装置と実装装置について、図面を参照して説明する。以下に示す各実施形態において、実質的に同一の構成部位には同一の符号を付し、その説明を一部省略する場合がある。図面は模式的なものであり、厚さと平面寸法との関係、各部の厚さの比率等は現実のものとは異なる場合がある。説明中における上下の方向を示す用語は、特に明記が無い場合には後述する半導体チップのピックアップ面(後述する上部吸着ノズルに吸着される面)を上とした場合の相対的な方向を示す。 Hereinafter, a pickup device and a mounting device for a semiconductor chip of the embodiment will be described with reference to the drawings. In each embodiment shown below, the same numerals may be given to a substantially the same component, and the explanation may be partially omitted. The drawings are schematic, and the relationship between the thickness and the planar dimension, the ratio of the thickness of each part, etc. may be different from the actual one. The term indicating the upper and lower directions in the description indicates a relative direction when the pickup surface of the semiconductor chip (surface to be adsorbed by the upper suction nozzle described later) described later is up unless otherwise specified.
[第1の実施形態]
(ピックアップ装置の構成)
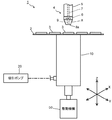
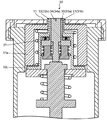
図1は実施形態の半導体チップのピックアップ装置の概略構成を示す図、図2は図1に示すピックアップ装置のバックアップ体の上面を示す斜視図、図3はバックアップ体の内部構造(押し上げ機構)を示す断面図である。図1に示すピックアップ装置1は、粘着シート2に貼着された複数の四角形状の半導体チップ3を粘着シート2から順に剥離して取り出す装置である。複数の半導体チップ3は、半導体ウエーハをさいの目状に切断して個片化したものであり、粘着シート2の上面に貼着されている。粘着シート2は、図示しないウエーハリングに張設されている。ピックアップ装置1は、粘着シート2の下面に対向して設けられたバックアップ体10を備えている。
First Embodiment
(Configuration of pickup device)
FIG. 1 is a view showing a schematic configuration of a semiconductor chip pickup device according to an embodiment, FIG. 2 is a perspective view showing an upper surface of a backup body of the pickup device shown in FIG. It is a sectional view showing. The
バックアップ体10には、その内部等を吸引して粘着シート2を吸着する吸引ポンプ20が接続されている。バックアップ体10は、図示しないZ駆動源によりZ方向に、バックアップ体10の上面が粘着シート2に接触する位置と、粘着シート2から離れた位置との間を駆動される。複数の半導体チップ3が貼着された粘着シート2は、図示しないウエーハリングをX方向及びY方向に駆動するX及びY駆動源によって、水平方向に移動させることが可能とされている。それによって、粘着シート2に貼着された半導体チップ3は、バックアップ体10に対してX及びY方向に位置決めすることが可能となっている。なお、バックアップ体10のZ方向の駆動に代えて、ウエーハリングをZ方向に駆動するようにしてもよい。粘着シート2が張設されたウエーハリングとバックアップユニット10とが、相対的にX、Y及びZ方向に駆動されるように構成されていればよい。
The
バックアップ体10の上方には、粘着シート2の上面側にピックアップ機構を構成する吸着ノズル体4が設けられている。吸着ノズル体4は、図示しないX、Y及びZ駆動源によりX、Y及びZ方向に駆動されるピックアップ軸5を有する。ピックアップ軸5の下端面には、凸部6が設けられている。ピックアップ軸5には、先端を凸部6の端面に開口させた吸引孔7が軸方向に沿って形成されている。吸引孔7は図1に示す吸引ポンプ20に接続されている。凸部6には、ゴムや軟質の合成樹脂等の弾性材料により形成された上部吸着ノズル8が着脱可能に取り付けられている。上部吸着ノズル8には、一端が吸引孔7に連通し、他端が先端面に開口したノズル孔9が形成されており、下面が平坦面8aとされている。ピックアップ軸5をZ方向に駆動するZ駆動源にはボイスコイルモータ等を用いて、吸着ノズル体4による押圧荷重が一定となるよう制御することが好ましい。
Above the
バックアップ体10は、図2及び図3に示すように、略円筒状のバックアップ筒11と、バックアップ筒11の上部開口に取り付けられたバックアップキャップ12とを備えている。バックアップキャップ12は四角形、この実施形態では矩形状の開口部13を有している。バックアップ体10の内部には、矩形状の開口部13に繋がる略中空円筒状の収容部14が上下方向に沿って形成されている。開口部13は、図2に破線で示すピックアップの対象となる矩形状の半導体チップ3よりもわずかに小さな矩形状に形成されている。つまり、開口部13は半導体チップ3と相似形状を有している。なお、半導体チップ3は矩形状ではなく、正方形の場合もあり、そのような場合にはバックアップキャップ12に形成される開口部13を半導体チップ3よりやや小さな正方形とすればよい。
As shown in FIGS. 2 and 3, the
バックアップキャップ12には、開口部13を囲むように複数の吸引孔15が設けられており、さらにその外側に環状の吸引溝16が同心的に形成されている。環状の吸引溝16は、バックアップ体10の径方向に沿って形成された連通溝17によって連通している。吸引孔15及び連通溝17は、バックアップ体10の内部や図示しない吸引配管を介して吸引ポンプ20に接続されている。吸引ポンプ20を作動させることによって、複数の吸引孔15及び連通溝17を介して吸引溝16に吸引力が発生する。従って、バックアップ体10の上面を粘着シート2の下面に接触させれば、その上面に粘着シート2が吸着保持される。つまり、バックアップ体10の上面は粘着シート2を吸着保持する吸着面を構成している。バックアップ体10の吸引孔15及び吸引溝16は、粘着シート2のピックアップされる半導体チップ3の周辺部分に相当する部分を吸引保持する。
The
バックアップ体10の収容部14内には、ピックアップされる半導体チップ3を押し上げるための押し上げ機構30が収容されている。押し上げ機構30は、軸線を同じにして同心状に設けられた第1ないし第4の押し上げ体31、32、33、34と、これら押し上げ体31〜34を垂直方向に駆動する駆動軸35とを有している。第1の押し上げ体31が最も外側に位置し、それから内側に向けて第2の押し上げ体32、第3の押し上げ体33、中心に位置する第4の押し上げ体34が順に同心状に配置されている。第1ないし第4の押し上げ体31〜34は、それぞれ垂直方向(ピックアップされる半導体チップ3を貼着した粘着シート2の上面に対して垂直方向、本実施形態ではZ方向。)に移動可能な状態でバックアップ体10内に配置されており、駆動軸35の上下動にしたがって垂直方向に駆動される。なお、押し上げ体の数は4個に限定されるものではなく、押し上げる半導体チップ3の大きさ等により適宜設定されるものであり、2個、3個、もしくは5個以上であってもよい。
In the
第1の押し上げ体31は、バックアップ体10の収容部14の内周壁に案内された状態で上下動可能に配置されている。第1の押し上げ体31は、外形状が収容部14とほぼ同じ円柱状をなし、下面が開放されていると共に、上面が中央の矩形の開口を除いて閉塞された第1の円筒部31aと、第1の円筒部31aの開口の周囲から上部に向けて立ち上げられた中空角筒状の第1の押し上げ部31bとを有している。第1の押し上げ部31bの先端面(上面)は、バックアップキャップ12の開口部13内に進入し露出している。第1の押し上げ部31bの先端面は、平面視において押し上げる半導体チップ3と相似形状であって、半導体チップ3よりもわずかに小さな大きさに形成されている。従って、半導体チップ3を押し上げたとき、半導体チップ3の縁部が第1の押し上げ体31bの周囲からわずかにはみ出すようになっている。
The first push-up
第2の押し上げ体32は、第1の押し上げ体31の内側に配置されており、第1の円筒部31aと略同様な円筒状をなし、下面が開放されていると共に、上面が中央の矩形の開口を除いて閉塞された第2の円筒部32aと、第2の円筒部32aの開口の周囲から上部に向けて立ち上げられ、第1の押し上げ部31bと相似形状を有する中空角筒状の第2の押し上げ部32bとを有している。第2の押し上げ部32bは、第1の押し上げ部31bの内側に所定のギャップを介して位置しており、その状態で第2の押し上げ部32bの先端面(上面)はバックアップキャップ12の開口部13内に露出している。
The second push-up
第2の押し上げ体32の第2の円筒部32aの下端部には、第1のフランジ部32cが設けられている。第1のフランジ部32cは、駆動軸35に対して上下方向にスライド自在に設けられた環状部材36と一体的に設けられている。第1の押し上げ体31の第1の円筒部31aの下端部は、第1のフランジ部32c上に配置されている。第2の円筒部32aは、第1の円筒部31aの内周面との間に所定の間隙が設けられる外周面を有している。第1の円筒部31aと第2の円筒部32aとの間隙には、第1のコイルバネ37が圧縮状態で配置されている。第1のコイルバネ37は、第1のフランジ部32cの上面と第1の円筒部31aの上面側閉塞部との間に挟まれており、これにより第1の押し上げ体31を上方に付勢した状態で支持している。
At the lower end portion of the second
駆動軸35は第2のフランジ部35aと第3のフランジ部35bとを有しており、第2のフランジ部35aと環状部材36との間には駆動軸35の周囲を取り囲む空間が形成されている。第3のフランジ部35bは環状部材36上に位置している。第2のフランジ部35aと環状部材36との間に設けられた空間に、駆動軸35の周りを囲むように第2のコイルバネ38が圧縮状態で配置されている。第2のコイルバネ38は、駆動軸35の周囲に設けられた環状部材36と第2のフランジ部35aとの間に挟まれており、これにより環状部材36を介して第2の押し上げ体32を上方に付勢した状態で支持している。
The
第3の押し上げ体33は第2の押し上げ体32の内側に配置されている。第3の押し上げ体33は、第2の押し上げ部32bの内側に配置され、第2の押し上げ部32bと相似形状の中空角筒状の第3の押し上げ部33aと、第3の押し上げ部33aの下端部に設けられた第4のフランジ部33bとを有している。第3の押し上げ部33aは、第2の押し上げ部32bの内側に所定のギャップを介して位置しており、その状態で第3の押し上げ部33bの先端面(上面)はバックアップキャップ12の開口部13内に露出している。
The
第4のフランジ部33b上には、左右に1つずつスペーサ33cが配置されている。スペーサ33cは中心に貫通孔が設けられた円盤形状を有する。第4のフランジ部33bと第2の円筒部32aの上面側閉塞部との間には、第3のコイルバネ39が圧縮状態で配置されている。第3のコイルバネ39は、第3の押し上げ体33を挟んで左右に1つずつ設けられており、スペーサ33cの貫通孔内に配置されている。第3のコイルバネ39によって、第2の押し上げ体32は上方に付勢された状態で支持されている。
One
第4の押し上げ体34は、第3の押し上げ体33の内側に配置されている。第4の押し上げ体34は、第3の押し上げ部33aの内側に所定のギャップを介して配置され、その状態で先端面(上面)がバックアップキャップ12の開口部13内に露出している、第3の押し上げ部33aと相似形状の中実角柱状の第4の押し上げ部34aと、第5のフランジ部34bとを有している。第4の押し上げ体34の下端面は、駆動軸35の上端面に固定されており、駆動軸35と一体に設けられている。
The fourth push-up
第3の押し上げ体33の第4のフランジ部33bの下面には、2本のガイドピン40が固定されており、2本のガイドピン40は第5のフランジ部34bに設けられた開口に挿通されている。ガイドピン40の下端には、抜け止め用の頭部が形成されている。2本のガイドピン40の周囲には、それぞれ第4のコイルバネ41が配置されている。2つの第4のコイルバネ41は、それぞれ第4のフランジ部33bと第5のフランジ部34bとの間に圧縮状態で配置されている。このような第4のコイルバネ41によって、第3の押し上げ体33は第4の押し上げ体34に対して上方に付勢された状態で支持されている。
The two guide pins 40 are fixed to the lower surface of the
第1の押し上げ体31は、第1のコイルバネ37により上方に付勢されているものの、図示しないピンの頭部が第2の押し上げ体32に当接することによって、上昇端位置が規制されている。これによって、駆動軸35が駆動していない下降状態において、第1の押し上げ体31の第1の押し上げ部31bの上面の位置は、第4の押し上げ体34の第4の押し上げ部34aの上面の位置と一致している。第2の押し上げ体32は、第2及び第3のコイルバネ38、39により上方に付勢されているものの、第1のフランジ部32cと一体的に設けられた環状部材36が駆動軸35の第3のフランジ部35bと当接することによって、上昇端位置が規制されている。これによって、駆動軸35が駆動していない下降状態において、第2の押し上げ体32の第2の押し上げ部32bの上面の位置は、第4の押し上げ体34の第4の押し上げ部34aの上面の位置と一致している。
Although the first push-up
同様に、第3の押し上げ体33は、第4のコイルバネ41により上方に付勢されているものの、ガイドピン40の頭部が第4の押し上げ体34の第5のフランジ部34bと当接することによって、上昇端位置が規制されている。これによって、駆動軸35が駆動していない下降状態において、第3の押し上げ体33の第3の押し上げ部33aの上面の位置は、第4の押し上げ体34の第4の押し上げ部34aの上面の位置と一致している。このように、第1ないし第4の押し上げ体31〜34の第1ないし第4の押し上げ部31b、32b、33a、34aの上面、具体的には粘着シート2との接触面は、駆動軸35が駆動していない下降状態において、同一の高さに位置しており、同一の平面を形成している。なお、後述するように第1ないし第3の押し上げ部31b、32b、33aの上面には、凸部及び粘着シート2との間に吸引力が作用する凹部が設けられているため、同一の平面を形成する粘着シート2との接触面は、凸部の上面となる。
Similarly, although the third push-up
また、図3に示す状態では、第1ないし第4の押し上げ部31b、32b、33a、34aの上面が、バックアップキャップ12の上面の位置よりも下側に位置するように示されているが、後述する、ピックアップする半導体チップ3が貼着された粘着シート2の部分を下面から吸着するときには、バックアップキャップ12の上面と同一の高さに移動する。この状態においても、第1ないし第4の押し上げ部31b、32b、33a、34aの上面は同一の高さに位置しており、駆動軸35が駆動していない下降状態に含まれる。つまり、駆動軸35が駆動していない下降状態とは、第1ないし第4の押し上げ部31b、32b、33a、34aの上面が同一の高さに位置することを意味する。
Further, in the state shown in FIG. 3, the upper surfaces of the first to fourth push-up
駆動軸35は、例えばサーボモータにより駆動されるボールネジ機構やカムローラ機構等の駆動機構50に接続されている。後に詳述するように、上記した下降状態から駆動機構50により駆動軸35を上昇駆動させることによって、第1ないし第4の押し上げ体31〜34は粘着シート2のピックアップする半導体チップ3が貼着された部分の下面を、外側から内側に向けて順に押圧する。押し上げ体31〜34で粘着シート2及び半導体チップ3を押圧するのに先立って、半導体チップ3は吸着ノズル体4の上部吸着ノズル8により吸着される。粘着シート2と共に半導体チップ3をバックアップ体10の上面から順に押し上げることによって、粘着シート2の半導体チップ3からの剥離を進行させる。第1ないし第4の押し上げ体31〜34による粘着シート2及び半導体チップ3の押し上げ動作については、後に詳述する。粘着シート2から剥離が進行した半導体チップ3は、上部吸着ノズル8により吸着された状態で、吸着ノズル体4をZ方向、さらにX及びY方向に駆動することにより粘着シート3からピックアップされる。
The
上記した半導体チップ3の粘着シート2からのピックアップ動作において、半導体チップ3に破損を生じさせる要因としては、第1ないし第4の押し上げ体31〜34による粘着シート2及び半導体チップ3の押し上げ動作、粘着シート2が半導体チップ3から剥離し始める箇所やそれによる剥離の進行過程等が考えられる。さらに、本願発明者等は第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面(先端面)が形成する平面の面精度(平面度)が、半導体チップ3の破損に影響を及ぼすことを見出した。すなわち、半導体チップ3をピックアップするにあたって、ピックアップ動作の初期段階として、粘着シート2の半導体チップ3に相当する部分に、下降状態にある第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面が形成する平面を接触させる。
In the pickup operation from the
例えば、厚さが30μm以下というような半導体チップ3をピックアップする際に、下降状態にある第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面が形成する平面の面精度(平面度)が例えば40μm程度である場合、第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面の凹凸が半導体チップ3の厚さを超えることになる。このような状態で第1ないし第4の押し上げ体31〜34を押し上げると、半導体チップ3の部位により押し上げ量(上下方向における変位)が異なることになり、この部位による押し上げ量の違いが半導体チップ3の破損を誘発することになる。特に、厚さが30μm以下というような半導体チップ3は、第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面が形成する平面の面精度(平面度)の影響を受けやすく、半導体チップをピックアップする際に破損が生じやすくなる。
For example, when picking up the
そこで、実施形態のピックアップ装置においては、第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面が形成する平面の面精度(平面度)を20μm以下としている。第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)を20μm以下とすることによって、半導体チップ3の部位による押し上げ量の違いを低減することができるため、半導体チップ3の破損を抑制することが可能になる。半導体チップ3の破損をより確実に抑制する上で、接触面が形成する平面の面精度(平面度)は15μm以下とすることがより好ましく、10μm以下とすることがさらに好ましい。
Therefore, in the pickup device of the embodiment, the surface accuracy (flatness) of the plane formed by the contact surfaces of the first to fourth push-up
本願明細書における第1ないし第4の押し上げ体31〜34の粘着シート2との各接触面が形成する平面の面精度(平面度)は、第1ないし第4の押し上げ体31〜34がバックアップ体10内で下降した状態において、各接触面が形成する平面の平面度を測定することにより規定される。各接触面が形成する平面の平面度は、例えば、測定顕微鏡等の非接触式の高さ測定器を用いて測定するものとする。具体的には、第1ないし第4の押し上げ部31b、32b、33a、34aの上面における四隅部においてそれぞれ高さ測定し、測定した合計16点の高さの最大値と最小値との差を求めることにより平面度を算出する。測定点の位置や数はこれに限られるものではなく、必要に応じて増やしたり減らしたりすることが可能である。測定点の数が多い程、精度良く平坦度を測定することが可能となる。なお、ダイヤルゲージ等の接触式の高さ測定器を用いることも可能である。ただし、接触により押し上げ部31b、32b、33a、34aが動いたりすることを考慮すると非接触式の測定器を用いることが好ましい。
The surface accuracy (flatness) of the plane formed by each contact surface of the first to fourth push-up
また、第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)は、ピックアップする半導体チップ3の厚さにより考慮することが好ましい。例えば、ピックアップする半導体チップ3の厚さが30μmの場合には、接触面が形成する平面の面精度(平面度)を20μm以下とすることで半導体チップ3の破損を抑制することができるものの、ピックアップする半導体チップ3の厚さが20μmの場合には、接触面が形成する平面の面精度(平面度)を15μm以下、さらに10μm以下とすることがより好ましい。このように、第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)は、半導体チップ3の厚さに応じて設定することが好ましい。
Further, it is preferable to consider the surface accuracy (flatness) of the plane formed by the contact surfaces of the first to fourth push-up
ところで、第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)を向上させるためには、第1ないし第4の押し上げ体31〜34の各接触面の平面度及び高さの精度を高めることが考えられる。ただし、第1ないし第4の押し上げ体31〜34は、押し上げ機構30として組み立てられ、その状態でバックアップ体10内に取り付けられて使用されるため、個別に接触面の平面度が20μm以下となるように、接触面の面精度や高さを調整しても、組み立て精度や取り付け精度によっては、第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)を20μm以下にできないおそれがある。そこで、第1ないし第4の押し上げ体31〜34の接触面の最終的な加工は、第1ないし第4の押し上げ体31〜34で押し上げ機構30をユニット化した後、あるいはバックアップ体10までを含めてユニット化した後に実施することが好ましい。
By the way, in order to improve the surface accuracy (flatness) of the plane formed by the contact surfaces of the first to fourth push-up
ユニットを組んだ後に第1ないし第4の押し上げ体31〜34の接触面を加工(合わせ加工)することによって、第1ないし第4の押し上げ体31〜34の接触面が形成する平面の面精度(平面度)をより確実に20μm以下とすることができる。ユニット化した第1ないし第4の押し上げ体31〜34の接触面の加工には、例えば研削砥石や研磨砥石を用いた接触加工や放電加工のような非接触加工を適用することができる。特に、放電加工はユニット化された第1ないし第4の押し上げ体31〜34に、例えばその配列方向(X−Y方向)に対して機械的な応力等を生じさせることなく接触面の平面度を高めることができる。従って、ユニット化した第1ないし第4の押し上げ体31〜34の接触面以外の形状精度や組み立て精度等を低下させることなく、平面度を向上させることができる。
The surface accuracy of the plane formed by the contact surfaces of the first to fourth push-up
また、ユニット化した第1ないし第4の押し上げ体31〜34の接触面の合わせ加工は、研削砥石等を用いた接触加工により実施してもよい。ただし、研削砥石等を用いた場合には、第1ないし第4の押し上げ体31〜34の配列方向(X−Y方向)に対して機械的な応力が生じることになり、加工時に押し上げ体31〜34が配列方向に移動(微振動)することによって、接触面が曲面状に加工されて平面度が低下するおそれがある。このような点に対しては、押し上げ体31〜34の接触面間の隙間(ギャップ)及び接触面に至る押し上げ部31b、32b、33a、34aの隙間(ギャップ)を狭くすることが好ましい。第1ないし第4の押し上げ部31b、32b、33a、34aの隙間は10μm以下とすることが好ましい。この隙間は7μm以下とすることがより好ましい。ただし、隙間が狭すぎると第1ないし第4の押し上げ部31b、32b、33a、34aの上下方向の動作が妨げられるおそれがあるため、隙間は2μm以上とすることが好ましい。
Further, the joint processing of the contact surfaces of the unitized first to fourth push-up
第1ないし第4の押し上げ部31b、32b、33a、34aの10μm以下の隙間は、上下方向に駆動する際のがたつき等を防止し、それ自体も半導体チップ3の破損を抑制する要因となる。このため、接触面の合わせ加工に放電加工を適用する場合においても、押し上げ部31b、32b、33a、34aの隙間は2μm以上10μm以下とすることが好ましい。この隙間は7μm以下とすることがより好ましい。押し上げ部31b、32b、33a、34aの隙間は、例えば、バックアップ体10内で組み込まれた第1ないし第4の押し上げ体31〜34が下降した状態において、押し上げ部31b、32b、33a、34aの上下方向への各摺動面間の隙間を測定することにより規定できる。
The gaps of 10 μm or less of the first to fourth push-up
さらに、ユニット化した第1ないし第4の押し上げ体31〜34の接触面の合わせ加工に研削砥石等を用いると、接触面の角部に隣接する接触面の方向に延びるバリを生じる場合がある。押し上げ部31b、32b、33a、34aの隙間を狭くした場合、接触面のバリや微妙な部品の歪によって、押し上げ部31b、32b、33a、34aの摺動性が低下するおそれがある。このような点に対しては、第1ないし第3の押し上げ体31〜33の接触面の内周側角部に一方の側面が開放された角溝や1/4円状の丸溝のような切り欠きを設けることが好ましい。内側に位置する押し上げ部の接触面の外周側に形成されたバリは、隣接する押し上げ部の接触面の内周側に形成された切り欠き内に位置するため、バリ同士が干渉して押し上げ部31b、32b、33a、34aの摺動性を低下させることを抑制することができる。
Furthermore, when a grinding stone or the like is used to align the contact surfaces of the unitized first to fourth push-up
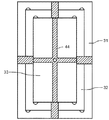
第1ないし第3の押し上げ体31〜33(第1ないし第3の押し上げ部31b、32b、33a)の上面を含む上部には、図4及び図5に示すように、それぞれ、四角形の4つの側辺部にそれぞれ位置する第1の凸部42(42a〜42c)と、四角形の4つの角部にそれぞれ位置する第2の凸部43(43a〜43c)と、第1の凸部42と第2の凸部43との間及び第1の凸部42間に位置する凹部44(44a〜44c)とが設けられている。第4の押し上げ体34の上面は、単一の平面状である。なお、図4では便宜的に凹部44の形成位置に斜線を付している。第1の凸部42(42a〜42c)は、半導体チップ3の4つの側辺部を部分的に支持するように、四角形の第1ないし第3の押し上げ体31〜33の4つの側辺部にそれぞれ複数設けられている。第2の凸部43は、半導体チップ3の角部をそれぞれ支持するように、四角形の第1ないし第3の押し上げ体31〜33の4つの角部にそれぞれ設けられている。
As shown in FIG. 4 and FIG. 5, four quadrangular quadrilaterals are formed on the upper part including the upper surfaces of the first to
凹部44には、バックアップ体10内に設けられた図示しない吸引配管や押し上げ体31〜34間の隙間を通じて、吸引ポンプ20の吸引力が伝わる。第1ないし第3の押し上げ体31〜33において、凹部44(44a〜44c)はそれぞれ、4つの側辺部にそれぞれ複数設けられている。隣接する第1の押し上げ体31と第2の押し上げ体32との間において、凹部44aと凹部44bは互い違いに設けられている。同様に、隣接する第2の押し上げ体32と第3の押し上げ体33との間おいて、凹部44bと凹部44cは互い違いに設けられている。すなわち、第1ないし第3の押し上げ体31〜33の外周(外形辺)から中心に向かう方向において、第1の押し上げ体31の凹部44aと第2の押し上げ体32の凹部44bの形成位置が一致しないように、第1の凸部42と第2の凸部43との間及び複数の第1の凸部42間に互い違いに形成されている。第2の押し上げ体32の凹部44bと第3の押し上げ体33の凹部44cの形成位置も同様である。押し上げ体31〜33の外周から中心に向かう方向(四角形の外周辺から中心に向けて直交する方向)において、第1の押し上げ体31の凹部44aの隣接する位置には、第2の押し上げ体32の第1の凸部42bが存在しており、第2の押し上げ体32の凹部44bの隣接する位置には、第3の押し上げ体33の第1の凸部42cが存在している。
The suction force of the
図4は、隣接する押し上げ体(31と32、及び32と33)における隣接する凹部44(44aと44b、及び44bと44c)の形成位置が一致しないように、各押し上げ体31〜33の凹部44a〜44cを配置した状態を示しているが、これに限られるものではない。例えば、図6に示すように、隣接する凹部44aと凹部44b及び凹部44bと凹部44cの端部が一部重なっていてもよい。ただし、凹部44aと凹部44b及び凹部44bと凹部44cの重なる長さが長くなりすぎると、下記に示す凹部44a〜44cを互い違いに配置したことによる粘着シート2の剥離性の向上効果、及び粘着シート2の剥離時における半導体チップ3へのダメージの抑制効果が低下する。このため、隣接する凹部44a、44b及び凹部44b、44cの重なる長さは、隣接する凹部44a、44b及び凹部44b、44cの周方向の長さ(側辺部に沿った方向の長さ)が同じとした場合、凹部44の周方向の長さの20%以下とすることが好ましい。隣接する凹部44a、44b及び凹部44b、44cの周方向の長さが異なる場合、長さが短い方の凹部44の周方向の長さの20%以下とすることが好ましい。
FIG. 4 shows the depressions of the respective push-up
また、四角形の第1ないし第3の押し上げ体31〜33の4つの側辺部において、それぞれ複数配置される第1の凸部42(42a〜42c)の周方向の長さが短すぎると、半導体チップ3の支持性が低下し、また長すぎると第1の凸部42間に配置される凹部44の数や長さが減少する。このため、第1の凸部42(42a〜42c)の周方向の長さは0.4mm以上2mm以下とすることが好ましい。凹部44(44a〜44c)の周方向の長さは、第1の凸部42(42a〜42c)の周方向の長さと同一でもよいし、異なっていてもよいが、第1の凸部42と同様に、周方向の長さを0.4mm以上2mm以下とすることが好ましい。上述した隣接する凹部44a、44b及び44b、44cの重なる長さを満足させる上で、凹部44の周方向の長さは隣接する第1の凸部42の周方向の長さの0.8倍以上1.2倍以下とすることが好ましい。
In addition, if the length in the circumferential direction of the plurality of first convex portions 42 (42a to 42c) arranged in a plurality at each of the four side portions of the first to
半導体チップ3が図2に鎖線で示すようにバックアップ体10の上面に吸着保持され、第1ないし第4の押し上げ体31〜34が粘着シート2を引き伸ばしながら順に上昇する際に、第1の凸部42は半導体チップ3の4つの側辺部を部分的に支持し、第2の凸部43は半導体チップ3の角部をそれぞれ支持する。さらに、凹部44に吸引ポンプ20の吸引力が伝わることによって、凹部44と粘着シート2との間には吸引力が作用する。凹部44と粘着シート2との間に作用する吸引力によって、第1ないし第4の押し上げ体31〜34が粘着シート2を引き伸ばしながら順に上昇する際に、凹部44の形状にしたがって半導体チップ3からの粘着シート2の剥離が進行する。
When the
上記したように、凹部44を半導体チップ3からの粘着シート2の剥離の起点とすることによって、半導体チップ3へストレス等を与えることなく、半導体チップ3からの粘着シート2の剥離を良好に進行させることができる。この際、隣接する第1ないし第3の押し上げ体31〜33の凹部44が互い違いに形成されているため、例えば第2の押し上げ体32の第1の凸部42bは第1の押し上げ体31の凹部44aの近傍を突き上げることになる。これによって、粘着シート2の剥離が第1の押し上げ体31の凹部44aを起点として進行する。次いで、第3の押し上げ体33を突き上げた状態において、剥離の進行が生じにくかった第1の凸部42aに隣接する凹部44bを起点として、粘着シート2の剥離が進行する。このように、粘着シート2の剥離を互い違いに、言い換えると徐々に進行させることによって、半導体チップ3へのストレス等を抑制することができる。
As described above, by using the
さらに、第1ないし第3の押し上げ体31〜33の凹部44による粘着シート2の剥離の進行形状は、図7に符号Pの部分(斜線で示した凹部44内の白抜き部分)で示すように、例えば凹部44aの隣接位置に第1の凸部42bが存在することで部分的となり、粘着シート2が剥離しやすくなると同時に、半導体チップ3に対するストレスが軽減される。凹部44bや凹部44cによる粘着シート2の剥離時においても、同様な形状で剥離が進行する。このような互い違いに形成された凹部44に基づく剥離の進行に対して、凹部44aの隣接位置に凹部44bが存在すると、粘着シート2の剥離が凹部44b内にまで進行するため、半導体チップ3に対するストレスが増大しやすくなる。また、凹部44aの幅が広すぎても、半導体チップ3に対するストレスが増大しやすくなる。
Further, the advancing shape of peeling of the
また、第1ないし第3の押し上げ体31〜33の第1の凸部42が互い違いに存在するため、半導体チップ3の均等な支持性が向上してダメージが抑制される。さらに、半導体チップ3の角部は第1ないし第3の押し上げ体31〜33の上面の角部に設けられた第2の凸部43で支持されているため、半導体チップ3の角部に力が加わることによる半導体チップ3の損傷等が抑制される。これらによって、半導体チップ3からの粘着シート2の剥離を良好に進行させつつ、半導体チップ3、特に厚さが30μm以下というように薄厚化した半導体チップ3のピックアップ時における破損を抑制することができる。
Further, since the first convex portions 42 of the first to third push-up
(ピックアップ装置の動作)
次に、図8ないし図12を参照して、実施形態のピックアップ装置1を用いて粘着シート2から半導体チップ3をピックアップする動作について説明する。まず、図8に示すように、ピックアップされる半導体チップ3をバックアップ体10の上面の開口部13に対して位置決めする。なお、図8では便宜的に開口部13より半導体チップ3の方を小さく図示している。半導体チップ3が位置決めされたら、吸引ポンプ20による吸引力で粘着シート2をバックアップ体10の吸着孔15及び吸着溝16が形成された上面とバックアップ体10内に配置された第1ないし第4の押し上げ体31〜34の上面により吸着保持する。粘着シート2は、ピックアップされる半導体チップ3の周辺部に対応する部分がバックアップ体10の上面により吸着保持され、上記半導体チップ3の下面に対応する部分が第1ないし第4の押し上げ体31〜34の上面により吸着保持される。ピックアップされる半導体チップ3の裏面に貼着された粘着シート2の吸引力は、ゲージ圧(大気圧を零とした場合の負圧)で−80kPa以下とすることが好ましく、さらに−85kPa以下とすることがより好ましい。このような吸引力を粘着シート2に作用させることによって、粘着シート2の半導体チップ3からの剥離性を高めることができる。
(Operation of pickup device)
Next, with reference to FIGS. 8 to 12, an operation of picking up the
上記した粘着シート2の半導体チップ3の下面に対応する部分は、下降した状態、つまり上面の高さがバックアップキャップ12の上面に一致した状態の第1ないし第4の押し上げ体31〜34の上面により吸着保持され、続いて実施される第1ないし第4の押し上げ体31〜34の押し上げ動作を待つ待機状態とされている。このような待機状態において、前述したように第1ないし第4の押し上げ体31〜34の粘着シート2との接触面、具体的には第1ないし第3の押し上げ部31b、32b、33aの第1及び第2の凸部42a〜42c、43a〜43cの上面、及び第4の押し上げ部34aの上面が形成する平面の面精度(平面度)が20μm以下とされている。従って、第1ないし第4の押し上げ体31〜34の接触面は、平面度が20μm以下の面精度に優れた状態で粘着シート2と接触しているため、そのような状態の粘着シート2に貼着された半導体チップ3の平面性が維持されている。
The portion of the
粘着シート2をバックアップ体10等で吸着保持したら、吸着ノズル体4を下降させて上部吸着ノズル8によりピックアップされる半導体チップ3の上面を吸着する。この状態で押し上げ機構30を駆動させる。押し上げ機構30の具体的な動作を図9ないし図12を参照して述べる。なお、図9ないし図12は押し上げ機構30の動作のみを示しており、半導体チップ3の図示は省略している。ただし、押し上げ機構30と粘着シート2及び半導体チップ3との位置関係等は、図8に示した通りである。なお、図8では上部吸着ノズル8の図示を簡略化して四角形で示している。
After the
まず、図9に示すように、駆動機構50を動作させて駆動軸35を上昇させることによって、第1ないし第4の押し上げ体31〜34を同時に所定の高さまで上昇させて粘着シート2及び半導体チップ3を押し上げる。第1ないし第4の押し上げ体31〜34は、第1の押し上げ体31の第1の円筒部31aの上面がバックアップキャップ12の内面に突き当たることによって、同一の高さで停止する。このとき、吸着ノズル体4は半導体チップ3と共に上昇する。第1ないし第4の押し上げ体31〜34が上昇して半導体チップ3を押し上げると、粘着シート2が引き伸ばされる。それによって、粘着シート2の半導体チップ3の周辺部に貼着された部分には張力と吸引力とが作用する。具体的には、半導体チップ3において第1の押し上げ体31bの周囲からはみ出した縁部に対応する粘着シート2の部分に張力と吸引力とが作用する。これによって、前記はみ出した縁部に対応する粘着シート2の部分が、半導体チップ3から剥離する。また、凹部44aに対応する粘着シート2の箇所には、吸引力が作用する。このため、粘着シート2の凹部44aに対応する箇所からも、図7に示すように、剥離が進行する。
First, as shown in FIG. 9, the
次に、図9に示した状態から駆動軸35をさらに上昇させると、第1の押し上げ体31はバックアップキャップ12の内面に突き当たっているため、図10に示すように、第2ないし第4の押し上げ体32〜34のみが上昇する。この第2ないし第4の押し上げ体32〜34の上昇過程で、第1のコイルバネ37が圧縮されていき、第2の押し上げ体32はその第1のフランジ部32cの上面が第1の押し上げ体31の第1の円筒部31aの下端面に突き当たることによって停止する。第2ないし第4の押し上げ体32〜34のみを上昇させることによって、粘着シート2の第1の押し上げ体31と接していた部分は粘着シート2に作用している張力と吸引力とで半導体チップ3に対して下側に引き下げられる。さらに、第1の押し上げ体31の上面に設けられた凹部44aには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44aに対応する部分から剥離しはじめる。
Next, when the
さらに説明すると、半導体チップ3の側辺部は第1の押し上げ体31に形成された第1の凸部42aと第2の凸部43aにより部分的に支持されているため、第1の凸部42aによって支持されていない、凹部44aに対応する箇所に張力及び吸引力が加わりやすくなる。しかも、半導体チップ3の側辺部が第1の凸部42aによって部分的に支持され、さらに角部が第2の凸部43aによって支持されている。つまり、半導体チップ3の側辺部は第1の凸部42aと第2の凸部43aにより均一に支持されているため、半導体チップ3の周辺部が粘着シート2の張力によって下方へ撓むことがほとんどない。その結果、粘着シート2は、半導体チップ3の周辺部の第1の押し上げ体34に形成された凹部44aに対応する箇所から先行して剥離しはじめることになる。すなわち、第2ないし第4の押し上げ体32〜34が上昇したことによって、第1の凸部42aおよび第2の凸部43aから離間した粘着シート2には、半導体チップ3に対して下側に引き下げる張力と吸引力が作用して剥離しはじめる。一方、先行して進行していた凹部44aに対応する個所の剥離はさらに進行して剥離を拡大する。これら双方の剥離が連結することで、第1の押し上げ体31により支持されていた部分全体が速やかに剥離する。なお、この後、第2の押し上げ体32の凹部44bに対応する粘着シート2の箇所には吸引力が作用しているから、第1の押し上げ体31の凹部44aと同様に、粘着シート2の凹部44bに対応する箇所が先行して剥離しはじめる。
To explain further, since the side portions of the
次に、図10に示した状態から駆動軸35をさらに上昇させると、第2の押し上げ体32は第1のフランジ部32cが第1の押し上げ体31に突き当たっているため、図11に示すように、第3及び第4の押し上げ体33、34のみが上昇する。この第3及び第4の押し上げ体33、34の上昇過程で、第2及び第3のコイルバネ38、39が圧縮されていき、第3の押し上げ体33はそのスペーサ33cの上面が第2の押し上げ体32の第2の円筒部32aの上面側閉塞部に突き当たることによって停止する。第3及び第4の押し上げ体33、34のみを上昇させることで、粘着シート2の第2の押し上げ体32と接していた部分は粘着シート2に作用している張力と吸引力とで半導体チップ3に対して下側に引き下げられる。これにより、第1の凸部42bおよび第2の凸部43bに対応する粘着シート2の箇所が半導体チップ3から剥離しはじめる。さらに、第2の押し上げ体32の上面に設けられた凹部44bには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44bに対応する部分の剥離が先行して進行している。この凹部44bに対応する箇所では剥離が拡大し、第1の凸部42bおよび第2の凸部43bに対応する箇所の剥離と連結し、第2の押し上げ体32により支持されていた部分全体が速やかに剥離する。なお、この後、第3の押し上げ体32の凹部44cに対応する粘着シート2の箇所には吸引力が作用するから、第1の押し上げ体31の凹部44aと同様に、粘着シート2の凹部44cに対応する箇所が先行して剥離しはじめる。
Next, when the
次に、図11に示した状態から駆動軸35をさらに上昇させると、第3の押し上げ体33はスペーサ33cが第2の押し上げ体32に突き当たっているため、図12に示すように、第4の押し上げ体34のみが上昇する。第4の押し上げ体34が上限位置で停止すると共に、第2及び第4のコイルバネ38、41が圧縮される。第4の押し上げ体34のみを上昇させることで、粘着シート2の第3の押し上げ体33と接していた部分は粘着シート2に作用している張力と吸引力とで半導体チップ3に対して下側に引き下げられる。これにより、第1の凸部42cおよび第2の凸部43cに対応する粘着シート2の箇所が半導体チップ3から剥離しはじめる。さらに、第3の押し上げ体33の上面に設けられた凹部44cには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44cに対応する部分の剥離が先行して進行している。この凹部44cに対応する箇所では剥離が拡大し、第3の押し上げ体33により支持されていた部分全体が速やかに剥離する。このようにして、粘着シート2は第4の押し上げ体34によって支持されている部分だけが半導体チップ3に貼着した状態として残る。
Next, when the
第4の押し上げ体34は角柱形状を有し、第1ないし第3の押し上げ体31〜33に比べて上端面の面積は小さく設定されている。従って、図12に示したように第4の押し上げ体34だけが上昇した後、半導体チップ3の上面を吸着した吸着ノズル体4を上昇させることによって、半導体チップ3は粘着シート2から比較的容易に剥離されることになる。言い換えれば、第4の押し上げ体34の上端面の面積は、粘着シート2の粘着力を考慮して、吸着ノズル体4の吸着力による引き上げによって半導体チップ3を粘着シート2から、半導体チップ3にストレスを生じさせることなく、剥離させることが可能な大きさに設定される。この後、吸着ノズル体4を上昇させることによって、半導体チップ3を粘着シート2からピックアップすることができる。
The fourth push-up
上述したように、半導体チップ3を粘着シート2から剥離してピックアップするにあたって、待機状態での第1ないし第4の押し上げ体31〜34の粘着シート2との接触面が形成する平面の面精度(平面度)が20μm以下とされており、この状態で粘着シート2に貼着された半導体チップ3の平面性が維持されている。従って、その後の第1ないし第4の押し上げ体31〜34の上昇動作時において、半導体チップ3の部位により押し上げ量が変動することによる半導体チップ3の破損を抑制することができる。すなわち、他の押し上げ体よりも部分的に突出している押し上げ体が存在すると、その位置に相当する半導体チップ3の部分に過大な応力が生じ、突出している押し上げ体に沿って半導体チップ3に割れ等が生じやすくなるが、実施形態のピックアップ装置1ではそのような半導体チップ3の部分的な突出等を生じさせるおそれがないため、待機状態から押し上げ体31〜34の上昇動作時における半導体チップ3の破損を抑制することができる。
As described above, when peeling off the
さらに、実施形態のピックアップ装置1においては、第1ないし第3の押し上げ体31〜33の各側辺部に第1の凸部42を設けると共に、各角部に第2の凸部43を設けているため、押し上げ機構30を上昇させた際に半導体チップ3の各側辺部を均一に支持することができる。その状態で、第1の凸部42間及び第1の凸部42と第2の凸部43との間に設けた凹部44と粘着シート2との間に吸引力を作用させているため、押し上げ機構30を上昇させた際に、粘着シート2が引き伸ばされることで発生する張力や粘着シート2を吸引する吸引力が粘着シート2の凹部44に対応する部分に集中して作用させることができる。従って、粘着シート2は凹部44に対応する箇所から円滑に剥離が開始されるため、粘着シート2の外側から内側に向けての剥離を良好に進行させることができる。
Furthermore, in the
また、第1ないし第3の押し上げ体31〜33の周辺部に凹部44を形成しているが、凹部44に隣接して第1の凸部42が設けられ、さらに角部には第2の凸部43が設けられている。このため、半導体チップ3の周辺部から粘着シート2を剥離する際に、粘着シート2の剥離の起点となる凹部44を設けつつ、半導体チップ3の各側辺部を第1の凸部42によって支持し、角部を第2の凸部43によって支持することができる。これらによって、凹部44を起点とする粘着シート2の剥離を良好に進行させつつ、半導体チップ3の周辺部が下方へ大きく撓むことが抑制されるため、半導体チップ3の破損を防ぐことができる。しかも、半導体チップ3の角部を含む各側辺部は、第1の凸部42と第2の凸部43によって均一に支持されているため、半導体チップ3の各側辺部に粘着シート2の張力が不均一に加わり、その側辺部が損傷することも防止される。
Moreover, although the recessed
[第2の実施形態]
(ピックアップ装置の動作)
図13は押し上げ機構30による押し上げ動作の他の例を示しており、図14は押し上げ機構30による押し上げ動作のさらに他の例を示している。なお、図13及び図14は押し上げ機構の構成を簡易的に示しているが、押し上げ機構及び各押し上げ体は図3ないし図6と同様な構成を有している。図13及び図14に示すように、押し上げ機構30による押し上げ動作は、図9ないし図12に示すように第1ないし第4の押し上げ体31〜34を順に上昇させる動作に限られない。図13は第1ないし第4の押し上げ体31〜34を一定の高さまで上昇させた後、外側の押し上げ体31〜33を順に下降させることによって、第1ないし第4の押し上げ体31〜34をピラミッド状とする動作を示している。図14は図9ないし図12に示す動作と図13に示す動作とを組み合わせた第1ないし第4の押し上げ体31〜34の動作を示している。
Second Embodiment
(Operation of pickup device)
FIG. 13 shows another example of the push-up operation by the push-up
図13に示す押し上げ機構30の押し上げ動作について述べる。まず、図13(a)に示すように、図9と同様に位置決めされた半導体チップ3に対応する粘着シート2の部分及びその周辺部分を、バックアップ体10の上面とバックアップ体10内に配置された第1ないし第4の押し上げ体31〜34の上面により吸着保持する。前述したように、この状態においては第1ないし第4の押し上げ体31〜34の粘着シート2との接触面が形成する平面の面精度(平面度)が20μm以下とされており、粘着シート2に貼着された半導体チップ3の平面性が維持されている。なお、図13では便宜的に開口部13より半導体チップ3の方を小さく図示している。
The push-up operation of the push-up
次に、図13(b)に示すように、第1ないし第4の押し上げ体31〜34を同時に所定の高さまで上昇させて粘着シート2及び半導体チップ3を押し上げる。第1ないし第4の押し上げ体31〜34が上昇して半導体チップ3を押し上げると、粘着シート2が引き伸ばされ、粘着シート2の半導体チップ3の周辺部を貼着した部分に張力と吸着力とが作用する。また、第1の押し上げ体31の上面に設けられた凹部44aには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44aに対応する部分から剥離しはじめる。次いで、図13(c)に示すように、第1の押し上げ体31を所定の高さまで下降させる。これによって、粘着シート2の第1の押し上げ体31と接していた部分は粘着シート2に作用している張力と吸着力とで下側に引き下げられる。さらに、第2の押し上げ体32の上面に設けられた凹部44bには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44bに対応する部分から剥離しはじめる。
Next, as shown in FIG. 13B, the first to fourth push-up
次に、図13(d)に示すように、第1及び第2の押し上げ体31、32を図13(c)に示す状態からさらに所定の高さまで下降させる。これによって、粘着シート2の第2の押し上げ体32と接していた部分は粘着シート2に作用している張力と吸着力とで下側に引き下げられる。さらに、第3の押し上げ体33の上面に設けられた凹部44cには、粘着シート2との間に吸引力が作用しているため、粘着シート2の凹部44cに対応する部分の剥離が進行する。この後、図13(e)に示すように、第1ないし第3の押し上げ体31〜33を図13(d)に示す状態からさらに所定の高さまで下降させる。これによって、粘着シート2の第3の押し上げ体33と接していた部分は粘着シート2に作用している張力と吸引力とで下側に引き下げられる。
Next, as shown in FIG. 13 (d), the first and second push-up
このようにして、粘着シート2は第4の押し上げ体34によって支持されている部分だけが半導体チップ3に貼着した状態として残る。第1の実施形態と同様に、第4の押し上げ体34は角柱形状を有し、第1ないし第3の押し上げ体31〜33に比べて上端面の面積は小さく設定されているため、半導体チップ3の上面を吸着した吸着ノズル体4を上昇させることによって、半導体チップ3は粘着シート2から比較的容易に剥離されることになる。この後、吸着ノズル体4を上昇させることによって、半導体チップ3を粘着シート2からピックアップすることができる。なお、第1ないし第4の押し上げ体31〜34に図13に示す動作を行わせる場合には、第1ないし第4の押し上げ体31〜34毎に個別に上下駆動軸を設けるようにするとよい。図14に示す動作の場合も同様である。
In this manner, only the portion supported by the fourth push-up
第2の実施形態においても、第1の実施形態と同様に、待機状態での第1ないし第4の押し上げ体31〜34の粘着シート2との接触面が形成する平面の面精度(平面度)が20μm以下とされており、この状態で粘着シート2に貼着された半導体チップ3の平面性が維持される。従って、第1ないし第4の押し上げ体31〜34の昇降動作時において、半導体チップ3の部位により移動量が変動することによる半導体チップ3の破損を抑制することができる。さらに、第2の実施形態においては、第1ないし第4の押し上げ体31〜34を同じ高さまで上昇させた後、第1ないし第3の押し上げ体31〜33を順に下降させてピラミッド状としているため、最終的に第4の押し上げ体34の周囲の粘着シート2が押し上げ体31〜33側に引き込まれる。従って、半導体チップ3の良好なピックアップ性を維持しつつ、ピックアップされる半導体チップ3の周囲に存在する半導体チップ3の周辺部の持ち上がりやそれによるクラックの発生等を抑制することができる。
Also in the second embodiment, as in the first embodiment, the surface accuracy (planarity) of the plane formed by the contact surfaces of the first to fourth push-up
次に、図14に示す押し上げ機構30の押し上げ動作について述べる。図14に示す押し上げ動作において、図14(a)〜(d)に示す動作は、図13(a)〜(d)に示す動作と同様である。図14(e)に示すように、最終的な動作は第4の押し上げ体34を所定の高さまで上昇させることにより実施される。これによって、第4の押し上げ体34による突き上げ量を増やすことができるため、粘着シート2を第4の押し上げ体34のみで支持した際の粘着テープ2の半導体チップ3からの剥離性を高めることができる。これ以外については、図13に示す押し上げ動作と同様な効果が得られる。なお、図14では便宜的に開口部13より半導体チップ3の方を小さく図示している。
Next, the push-up operation of the push-up
[第3の実施形態]
(ピックアップ装置の構成)
図15及び図16は押し上げ機構30を構成する複数の押し上げ体の他の例を示している。図15及び図16に示すように、複数の押し上げ体の構成は、図4及び図5に示す第1ないし第4の押し上げ体31〜34に限られない。図15及び図16は、それぞれ第1ないし第3の押し上げ体31〜33を有する押し上げ機構30を示している。このように、押し上げ体の数は特に限定されるものではなく、複数の押し上げ体で半導体チップ3をピラミッド状に押し上げることが可能であればよく、押し上げる半導体チップ3の大きさによっては2個、3個、4個、さらに5個以上であってもよい。
Third Embodiment
(Configuration of pickup device)
FIGS. 15 and 16 show other examples of a plurality of push-up bodies constituting the push-up
さらに、押し上げ体31〜33の粘着シート2との接触面の形状も特に限定されるものではない。図15に示す第1及び第2の押し上げ体31〜32の上面を含む上部には、第1の実施形態と同様に、四角形の4つの側辺部にそれぞれ位置する第1の凸部42(42a、42b)と、四角形の4つの角部にそれぞれ位置する第2の凸部43(43a、43b)と、第1の凸部42と第2の凸部43との間及び第1の凸部42間に位置する凹部44(44a、44b)とが設けられている。図16に示す第1ないし第3の押し上げ体31〜33の上面には、中央に十字状の凹部44が設けられており、十字状の凹部44が粘着シート2に吸引力を作用させる機能を有している。
Furthermore, the shape of the contact surface of the push-up
このように、複数の押し上げ体31〜33の上面は、粘着シート2を吸引して剥離の始点となる凹部44を有していることが好ましいものの、凹部44の形成位置は特に限定されるものではない。また、図4ないし図6に示す押し上げ体31〜34、及び図15に示す押し上げ体31〜33において、中央に位置する押し上げ体(34、33)には凹部を設けていないが、半導体チップ3の形状や大きさ等によっては中央に位置する押し上げ体(34、33)に凹部を設けてもよい。凹部44は複数の押し上げ体(31〜34、31〜33)の少なくとも最外周に位置する押し上げ体31に形成されていればよいが、最内周の押し上げ体(34、33)を除いて、最外周の押し上げ体31及びそれらの中間の押し上げ体(32〜33、32)に形成されていることが好ましい。ただし、図16に示すように、場合によっては中央に位置する押し上げ体33に凹部を設けてもよい。さらに、複数の押し上げ体をピラミッド状に上昇又は下降させることによって、粘着シート2を剥離することが可能であれば、複数の押し上げ体の上面に凹部を設けなくてもよい。
As described above, although it is preferable that the upper surfaces of the plurality of push-up
なお、上述した各実施形態においては、半導体チップ3が粘着シート2に直接貼着されている場合を例に挙げて説明したが、これに限られるものではない。例えば、裏面にDAF(Die Attach Film)が貼付けられた半導体チップを、DAFを介して粘着シートに貼着する場合があり、そのような場合であっても、上述した各実施形態のピックアップ装置1を適用することができる。また、ピックアップする半導体チップ3は、特に限定されるものではなく、ダイボンディングされる半導体チップであってもよいし、フリップチップボンディングされる半導体チップであってもよい。
In each embodiment mentioned above, although a case where
[第4の実施形態]
(半導体チップの実装装置)
図17は第4の実施形態による半導体チップの実装装置の概略構成を示している。図17に示す実装装置100は、半導体チップ3を基板101上にダイボンディングするダイボンダである。実装装置100は、半導体チップ3を供給する供給部110と、基板101を搬送する搬送部120と、半導体チップ3をピックアップするピックアップ部130と、半導体チップ3を基板101に実装する実装部140とを備えている。これら各部の動作は図示しない制御手段により統括制御される。
Fourth Embodiment
(Mounting device for semiconductor chip)
FIG. 17 shows a schematic configuration of a semiconductor chip mounting apparatus according to the fourth embodiment. The mounting
半導体チップ3の供給部110は、複数の半導体チップ3が貼着された粘着シート2が張設されたウエーハリング111が図示しないウエーハリング供給装置により供給されるウエーハテーブル112を有している。ウエーハテーブル112は、図示しないX及びY駆動源、θ方向駆動源に接続されている。ウエーハテーブル112は、供給されたウエーハリング111を保持すると共に、図中X及びY軸方向とθ軸方向に駆動される。基板101の搬送部120は、リードフレームや樹脂製シート等の基板101の搬送及び支持手段としての一対のガイドレール121を備えている。一対のガイドレール121は、図中X軸方向に沿って配置され、基板101を図示しない搬送機構によりピッチ送りする。
The
ピックアップ部130は、一部図示を省略しているが、前述した第1ないし第3の実施形態によるピックアップ装置1を備えている。すなわち、ピックアップ部130は、複数の半導体チップ3が貼着された粘着シート2を有するウエーハリング111の上方に配置された吸着ノズル体4と、ウエーハリング111の下方に配置された、図示しない押し上げ機構を有するバックアップ体とを備えている。ピックアップ装置1の具体的な構成は、前述した通りである。ピックアップ部130においては、図示しないピックアップ装置(バックアップ体)上にウエーハテーブル112の駆動源により位置決めされた半導体チップ3を前述したピックアップ動作に基づいて吸着ノズル体4によりピックアップする。
The
実装部140は、供給部110から取り出された半導体チップ3が一旦載置される中間ステージとしてのプリサイサステージ141と、プリサイサステージ141に載置された半導体チップ3を基板101に実装する実装ツール142とを備えている。半導体チップ3を供給部110からピックアップした吸着ノズル体4を、図示しないX、Y及びZ駆動源によりX、Y及びZ軸方向に駆動することによって、プリサイサステージ141上に吸着ノズル体4から半導体チップ3を載置する。プリサイサステージ141に載置された半導体チップ3は、実装ツール142により吸着保持され、図示しないX、Y及びZ駆動源により実装ツール142をX、Y及びZ軸方向に駆動することによって、ガイドレール121に保持された基板101の上方の実装位置に位置決めされる。この状態から実装ツール142は下降方向に駆動され、半導体チップ3を基板101に実装する。
The mounting
上述した実施形態の実装装置100においては、供給部110から半導体チップ3をピックアップするピックアップ部130に、前述した実施形態のピックアップ装置1を用いているため、例えば厚さが30μm以下というような薄厚化された半導体チップ3を実装する場合においても、半導体チップ3の破損等を抑制しつつ、粘着シート2から半導体チップ3をより確実にピックアップすることができる。従って、半導体チップ3の基板101上への実装歩留まりや実装信頼性を高めることができる。
In the mounting
なお、上述した実施形態では実装装置をダイボンダに適用した例を示したが、これに限られるものではない。実施形態の実装装置は、フリップチップボンダに適用することも可能である。また、供給部110からピックアップした半導体チップ3をプリサイサステージ141に載置する構成を示したが、これに限られるものではなく、ピックアップした半導体チップ3を直接基板101上に実装するようにしてもよい。つまり、吸着ノズル体4が実装ツール142を兼用するようにしてもよい。さらに、搬送部120はリードフレームや樹脂製シート等の基板101を搬送及び支持する一対のガイドレール121に限られるものではなく、使用する基板に応じた構成が適用される。例えば、回路基板やインターポーザ基板等の上に半導体チップ3を実装する場合には、個片化された基板又は複数の実装領域を有する基板を搬送する機構が適用される。このように、実施形態の実装装置の各部110、120、140には、ピックアップ装置1の構成を除いて、各種公知の構成を適用することができる。
In addition, although the example which applied the mounting apparatus to the die bonder was shown in embodiment mentioned above, it is not restricted to this. The mounting apparatus of the embodiment can also be applied to a flip chip bonder. Although the
次に、本発明の実施例とその評価結果について述べる。 Next, examples of the present invention and the evaluation results thereof will be described.
(実施例1)
前述した第1の実施形態のピックアップ装置1を組み立て、以下の条件でピックアップ試験を行なった。押し上げ機構には、図4及び図5に示した第1ないし第4の押し上げ体を使用した。第1ないし第4の押し上げ体の粘着シートとの接触面は、ユニット化した状態で平面度が10μm以下となるように合わせ加工した。ユニットとしての第1ないし第4の押し上げ体の接触面の平面度は9μmであった。そのような第1ないし第4の押し上げ体を用いたピックアップ装置において、図9ないし図12に示した押し上げ動作を適用して、以下の半導体チップのピックアップ試験を行った。その結果を表1に示す。
Example 1
The
<試験条件>
(1)直径300mmのウエーハから10×12mmの半導体チップを100個ピックアップし、ピックアップ時に割れが発生した半導体チップ数を測定した。
(2)半導体チップは、厚さが30μm、20μmの2種類準備し、それぞれについてピックアップ試験を実施した。
<Test conditions>
(1) 100 semiconductor chips of 10 × 12 mm were picked up from a wafer having a diameter of 300 mm, and the number of semiconductor chips in which cracking occurred at the time of pickup was measured.
(2) Two kinds of semiconductor chips, 30 μm and 20 μm in thickness, were prepared, and a pickup test was carried out for each.
(実施例2)
実施例1のピックアップ装置において、図13に示した押し上げ動作を適用する以外は、実施例1と同様にしてピックアップ試験を行った。その結果を表1に示す。
(Example 2)
A pickup test was conducted in the same manner as in Example 1 except that the push-up operation shown in FIG. 13 was applied to the pickup device of Example 1. The results are shown in Table 1.
(実施例3)
実施例1のピックアップ装置において、図14に示した押し上げ動作を適用する以外は、実施例1と同様にしてピックアップ試験を行った。その結果を表1に示す。
(Example 3)
A pickup test was conducted in the same manner as in Example 1 except that the push-up operation shown in FIG. 14 was applied to the pickup device of Example 1. The results are shown in Table 1.
(実施例4)
実施例1のピックアップ装置において、図15に示した第1ないし第3の押し上げ体を用いる以外は、実施例1と同様にしてピックアップ試験を行った。その結果を表1に示す。
(Example 4)
A pickup test was conducted in the same manner as in Example 1 except that the first to third push-up members shown in FIG. 15 were used in the pickup device of Example 1. The results are shown in Table 1.
(実施例5)
実施例1のピックアップ装置において、図16に示した第1ないし第3の押し上げ体を用いる以外は、実施例1と同様にしてピックアップ試験を行った。その結果を表1に示す。
(Example 5)
A pickup test was conducted in the same manner as in Example 1 except that the first to third pushers shown in FIG. 16 were used in the pickup device of Example 1. The results are shown in Table 1.
(比較例1)
実施例1と同様に、図4及び図5に示した第1ないし第4の押し上げ体を用いたピックアップ装置を組み立てた。ただし、第1ないし第4の押し上げ体の粘着シートとの接触面は、個別に平面度が20μm以下となるように加工した。ユニットとしての第1ないし第4の押し上げ体の接触面の平面度は48μmであった。そのような第1ないし第4の押し上げ体を有するピックアップ装置を用いる以外は、実施例1と同様にして半導体チップのピックアップ試験を行った。その結果を表1に示す。
(Comparative example 1)
As in Example 1, a pickup apparatus using the first to fourth pushers shown in FIGS. 4 and 5 was assembled. However, the contact surfaces of the first to fourth push-up bodies with the pressure-sensitive adhesive sheet were individually processed so that the flatness was 20 μm or less. The flatness of the contact surface of the first to fourth pushers as a unit was 48 μm. The semiconductor chip was subjected to the pickup test in the same manner as in Example 1 except that the pickup device having such first to fourth pushers was used. The results are shown in Table 1.

なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施し得るものであり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると共に、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
例えば、上記実施形態においては、第1ないし第4の押し上げ体31〜34を垂直方向に駆動させるものとしたが、垂直方向とは、ウエーハステージ112に保持されたウエーハリング111の粘着シート2の上面に対して垂直方向であって、必ずしも水平面に対して垂直方向である必要はない。すなわち、粘着シート2が水平面に対して垂直に保持されているのであれば、垂直方向は水平方向であってもよい。
While certain embodiments of the invention have been described, these embodiments have been presented by way of example only, and are not intended to limit the scope of the invention. These novel embodiments can be implemented in other various forms, and various omissions, replacements and changes can be made without departing from the scope of the invention. These embodiments and modifications thereof are included in the scope and the gist of the invention, and are included in the invention described in the claims and the equivalent scope thereof.
For example, in the above embodiment, although the first to fourth push-up
1…ピックアップ装置、2…粘着シート、3…半導体チップ、4…吸着ノズル体、8…上部吸着ノズル、10…バックアップ体、11…バックアップ筒、12…バックアップキャップ、13…開口部、15…吸引孔、16…吸引溝、20…吸引ポンプ、30…押し上げ機構、31…第1の押し上げ体、31b…第1の押し上げ部、32…第2の押し上げ体、32b…第2の押し上げ部、33…第3の押し上げ体、33a…第3の押し上げ部、
34…第4の押し上げ体、34a…第4の押し上げ部、35…駆動軸、42…第1の凸部、43…第2の凸部、44…凹部、50…駆動機構、100…実装装置、101…基板、110…供給部、120…搬送部、130…ピックアップ部、140…実装部。
DESCRIPTION OF
34: fourth push-up
Claims (19)
前記粘着シートのピックアップされる前記半導体チップの周辺部分に対応する部分を吸着保持する吸着面が上面に設けられたバックアップ体と、
軸心を同じにして互いに垂直方向に移動可能な状態で前記バックアップ体内に設けられた複数の押し上げ体を有し、前記複数の押し上げ体の前記粘着シートとの接触面は前記複数の押し上げ体が下降した状態で同一の平面を形成する押し上げ機構と、
前記複数の押し上げ体を昇降駆動させる駆動機構であって、前記粘着シートの前記ピックアップされる半導体チップが貼着された部分の下面を押圧し、少なくとも前記粘着シートと共に前記半導体チップを前記バックアップ体の上面から押し上げることによって、前記粘着シートの前記半導体チップからの剥離を進行させる駆動機構と、
前記粘着シートの剥離が進行した前記半導体チップを前記粘着シートからピックアップするピックアップ機構とを具備し、
前記下降状態における前記複数の押し上げ体の前記粘着シートとの接触面により形成される前記平面の平面度が20μm以下である、半導体チップのピックアップ装置。 A semiconductor chip pickup device for picking up a rectangular semiconductor chip attached to an adhesive sheet from the adhesive sheet,
A backup body provided on an upper surface thereof with an adsorption surface for adsorbing and holding a portion corresponding to the peripheral portion of the semiconductor chip to be picked up of the adhesive sheet;
It has a plurality of pushers provided in the backup body so as to be movable in the vertical direction with the same axial center, and the contact surfaces of the plurality of pushers with the adhesive sheet are the plurality of pushers. A push-up mechanism that forms the same plane in the lowered state;
A driving mechanism for vertically moving the plurality of push-up members, pressing a lower surface of a portion of the pressure-sensitive adhesive sheet to which the semiconductor chip to be picked up is stuck; A driving mechanism for promoting the peeling of the pressure-sensitive adhesive sheet from the semiconductor chip by pushing it up from the upper surface;
And a pick-up mechanism that picks up, from the pressure-sensitive adhesive sheet, the semiconductor chip on which the peeling of the pressure-sensitive adhesive sheet has progressed,
The pick-up apparatus of the semiconductor chip whose flatness of the said plane formed of the contact surface with the said adhesive sheet of the said some pushing-up body in the said descend | falling state is 20 micrometers or less.
前記外周押し上げ体は、複数の前記第1の凸部と、前記複数の第1の凸部の間に配置された複数の前記凹部とを有し、
前記中間押し上げ体は、複数の前記第1の凸部と、前記複数の第1の凸部の間に前記外周押し上げ体の前記複数の凹部と互い違いに配置された複数の前記凹部とを有する、請求項4又は請求項5に記載の半導体チップのピックアップ装置。 The plurality of push-up bodies are an outer peripheral push-up body located at the outermost periphery, an inner peripheral push-up body located at the innermost peripheral edge, and at least one middle disposed between the outer peripheral push-up body and the inner peripheral push-up body. Have a push-up body,
The outer circumferential push-up body has a plurality of the first convex portions and a plurality of the concave portions disposed between the plurality of first convex portions.
The intermediate push-up body has a plurality of the first convex portions and a plurality of the concave portions alternately arranged between the plurality of first convex portions and the plurality of concave portions of the outer circumferential push-up body. The pick-up apparatus of the semiconductor chip of Claim 4 or Claim 5.
前記粘着シートのピックアップされる前記半導体チップの周辺部分に対応する部分を吸着保持する吸着面が上面に設けられたバックアップ体と、
軸心を同じにして互いに垂直方向に移動可能な状態で前記バックアップ体内に設けられた複数の押し上げ体を備える押し上げ機構と、
前記複数の押し上げ体を昇降駆動させる駆動機構であって、前記粘着シートの前記ピックアップされる半導体チップが貼着された部分の下面を押圧し、少なくとも前記粘着シートと共に前記半導体チップを前記バックアップ体の上面から押し上げることによって、前記粘着シートの前記半導体チップからの剥離を進行させる駆動機構と、
前記粘着シートの剥離が進行した前記半導体チップを前記粘着シートからピックアップするピックアップ機構とを具備し、
前記複数の押し上げ体は、少なくとも、最外周に位置する第1の押し上げ体と、前記第1の押し上げ体の内周側に隣接する第2の押し上げ体とを備え、
前記第1の押し上げ体および前記第2の押し上げ体は、それらの上面にそれぞれ設けられた、前記半導体チップの4つの側辺部に対応する部分を部分的に支持する複数の第1の凸部と、前記半導体チップの角部に対応する部分を支持する第2の凸部と、前記複数の第1の凸部間および前記第1の凸部と前記第2の凸部との間に位置し、前記粘着シートとの間に吸引力が作用する複数の凹部とを有し、
前記第2の押し上げ体の前記複数の凹部は、前記第1の押し上げ体の前記複数の凹部と互い違いに配置されている、半導体チップのピックアップ装置。 A semiconductor chip pickup device for picking up a rectangular semiconductor chip attached to an adhesive sheet from the adhesive sheet,
A backup body provided on an upper surface thereof with an adsorption surface for adsorbing and holding a portion corresponding to the peripheral portion of the semiconductor chip to be picked up of the adhesive sheet;
A push-up mechanism including a plurality of push-up bodies provided in the backup body in the state of being axially movable in the same vertical direction with each other,
A driving mechanism for vertically moving the plurality of push-up members, pressing a lower surface of a portion of the pressure-sensitive adhesive sheet to which the semiconductor chip to be picked up is stuck; A driving mechanism for promoting the peeling of the pressure-sensitive adhesive sheet from the semiconductor chip by pushing it up from the upper surface;
And a pick-up mechanism that picks up, from the pressure-sensitive adhesive sheet, the semiconductor chip on which the peeling of the pressure-sensitive adhesive sheet has progressed,
The plurality of push-up bodies include at least a first push-up body located at the outermost periphery, and a second push-up body adjacent to the inner peripheral side of the first push-up body,
The first push-up body and the second push-up body are respectively provided on upper surfaces thereof, and are provided with a plurality of first convex portions that partially support portions corresponding to four side portions of the semiconductor chip. And a second convex portion supporting a portion corresponding to the corner portion of the semiconductor chip, a position between the plurality of first convex portions and a position between the first convex portion and the second convex portion And a plurality of recesses on which the suction force acts between the adhesive sheet and
The pickup device for a semiconductor chip, wherein the plurality of recesses of the second push-up body are alternately arranged with the plurality of recesses of the first push-up body.
前記第3の押し上げ体は、その上面に設けられた、前記半導体チップの4つの側辺部に対応する部分を部分的に支持する複数の第1の凸部と、前記半導体チップの角部に対応する部分を支持する第2の凸部と、前記複数の第1の凸部間および前記第1の凸部と前記第2の凸部との間に前記第2の押し上げ体の前記複数の凹部と互い違いに配置され、前記粘着シートとの間に吸引力が作用する複数の凹部とを有する、請求項13に記載の半導体チップのピックアップ装置。 The plurality of push-up bodies further include a third push-up body adjacent to the inner circumferential side of the second push-up body,
The third push-up body is provided on the upper surface thereof with a plurality of first convex portions that partially support portions corresponding to the four side portions of the semiconductor chip, and corner portions of the semiconductor chip. The plurality of second push-up bodies of the second push-up body between the second convex portion supporting the corresponding portion, the plurality of first convex portions and the plurality of first convex portions and the second convex portion. 14. The semiconductor chip pick-up device according to claim 13, further comprising: a plurality of concave portions arranged alternately with the concave portions and on which the suction force acts between the adhesive sheet.
基板を搬送する搬送部と、
前記供給部から前記半導体チップを取り出すピックアップ部であって、請求項1ないし請求項18のいずれか1項に記載のピックアップ装置を備えるピックアップ部と、
前記ピックアップ部により取り出された前記半導体チップを、直接又は中間ステージを介して前記基板上に実装する実装部と
を具備する半導体チップの実装装置。 A supply unit for supplying a semiconductor chip;
A transport unit that transports the substrate;
A pickup unit for taking out the semiconductor chip from the supply unit, comprising: the pickup device according to any one of claims 1 to 18;
And a mounting unit for mounting the semiconductor chip taken out by the pickup unit on the substrate directly or via an intermediate stage.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017076669 | 2017-04-07 | ||
| JP2017076669 | 2017-04-07 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019203670A Division JP7023590B2 (en) | 2017-04-07 | 2019-11-11 | Semiconductor chip pickup and mounting equipment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018182278A true JP2018182278A (en) | 2018-11-15 |
| JP2018182278A5 JP2018182278A5 (en) | 2019-12-19 |
Family
ID=64276982
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017148129A Pending JP2018182278A (en) | 2017-04-07 | 2017-07-31 | Pick-up apparatus and implementation apparatus for semiconductor chip |
| JP2019203670A Active JP7023590B2 (en) | 2017-04-07 | 2019-11-11 | Semiconductor chip pickup and mounting equipment |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019203670A Active JP7023590B2 (en) | 2017-04-07 | 2019-11-11 | Semiconductor chip pickup and mounting equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP2018182278A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020047871A (en) * | 2018-09-21 | 2020-03-26 | ファスフォードテクノロジ株式会社 | Semiconductor manufacturing apparatus, push-up jig and manufacturing method of semiconductor device |
| JP2021100010A (en) * | 2019-12-19 | 2021-07-01 | 芝浦メカトロニクス株式会社 | Pick-up device and mounting device of electronic component |
| KR20210153584A (en) * | 2019-03-25 | 2021-12-17 | 파스포드 테크놀로지 주식회사 | Semiconductor manufacturing apparatus and method for manufacturing semiconductor device |
| WO2022123645A1 (en) * | 2020-12-08 | 2022-06-16 | 株式会社新川 | Pickup device for semiconductor die |
| JP7497920B1 (en) | 2023-08-09 | 2024-06-11 | 株式会社新川 | Pickup unit, mounting device, and pickup method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102617784B1 (en) * | 2020-07-09 | 2023-12-26 | 세메스 주식회사 | Die ejector and die bonding apparatus including the same |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007042996A (en) * | 2005-08-05 | 2007-02-15 | Renesas Technology Corp | Semiconductor-device manufacturing method, and semiconductor manufacturing apparatus |
| JP2008004936A (en) * | 2006-06-19 | 2008-01-10 | Samsung Electronics Co Ltd | Device for detaching semiconductor chip with pair of ejector and method for detaching semiconductor chip using the same |
| JP2009188157A (en) * | 2008-02-06 | 2009-08-20 | Panasonic Corp | Chip-releasing device, chip-releasing method, and chip-pickup device |
| JP2010056466A (en) * | 2008-08-29 | 2010-03-11 | Shibaura Mechatronics Corp | Device and method for picking up semiconductor chip |
| JP2012004393A (en) * | 2010-06-17 | 2012-01-05 | Hitachi High-Tech Instruments Co Ltd | Die bonder and pickup method and pickup device |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5054949B2 (en) * | 2006-09-06 | 2012-10-24 | ルネサスエレクトロニクス株式会社 | Manufacturing method of semiconductor device |
-
2017
- 2017-07-31 JP JP2017148129A patent/JP2018182278A/en active Pending
-
2019
- 2019-11-11 JP JP2019203670A patent/JP7023590B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007042996A (en) * | 2005-08-05 | 2007-02-15 | Renesas Technology Corp | Semiconductor-device manufacturing method, and semiconductor manufacturing apparatus |
| JP2008004936A (en) * | 2006-06-19 | 2008-01-10 | Samsung Electronics Co Ltd | Device for detaching semiconductor chip with pair of ejector and method for detaching semiconductor chip using the same |
| JP2009188157A (en) * | 2008-02-06 | 2009-08-20 | Panasonic Corp | Chip-releasing device, chip-releasing method, and chip-pickup device |
| JP2010056466A (en) * | 2008-08-29 | 2010-03-11 | Shibaura Mechatronics Corp | Device and method for picking up semiconductor chip |
| JP2012004393A (en) * | 2010-06-17 | 2012-01-05 | Hitachi High-Tech Instruments Co Ltd | Die bonder and pickup method and pickup device |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200034600A (en) * | 2018-09-21 | 2020-03-31 | 파스포드 테크놀로지 주식회사 | Semiconductor manufacturing apparatus, push-up jig and method for manufacturing semiconductor device |
| CN110943008A (en) * | 2018-09-21 | 2020-03-31 | 捷进科技有限公司 | Semiconductor manufacturing apparatus, pushing jig, and method for manufacturing semiconductor device |
| JP2020047871A (en) * | 2018-09-21 | 2020-03-26 | ファスフォードテクノロジ株式会社 | Semiconductor manufacturing apparatus, push-up jig and manufacturing method of semiconductor device |
| KR102296641B1 (en) | 2018-09-21 | 2021-09-02 | 파스포드 테크놀로지 주식회사 | Semiconductor manufacturing apparatus, push-up jig and method for manufacturing semiconductor device |
| CN110943008B (en) * | 2018-09-21 | 2023-07-11 | 捷进科技有限公司 | Semiconductor manufacturing apparatus, pushing jig, and method for manufacturing semiconductor device |
| JP7217605B2 (en) | 2018-09-21 | 2023-02-03 | ファスフォードテクノロジ株式会社 | Semiconductor manufacturing equipment, push-up jig, and semiconductor device manufacturing method |
| KR102513375B1 (en) | 2019-03-25 | 2023-03-24 | 파스포드 테크놀로지 주식회사 | Semiconductor manufacturing apparatus and method for manufacturing semiconductor device |
| KR20210153584A (en) * | 2019-03-25 | 2021-12-17 | 파스포드 테크놀로지 주식회사 | Semiconductor manufacturing apparatus and method for manufacturing semiconductor device |
| JP2021100010A (en) * | 2019-12-19 | 2021-07-01 | 芝浦メカトロニクス株式会社 | Pick-up device and mounting device of electronic component |
| JP7458773B2 (en) | 2019-12-19 | 2024-04-01 | 芝浦メカトロニクス株式会社 | Pick-up equipment and mounting equipment for electronic components |
| WO2022123645A1 (en) * | 2020-12-08 | 2022-06-16 | 株式会社新川 | Pickup device for semiconductor die |
| JP7542875B2 (en) | 2020-12-08 | 2024-09-02 | 株式会社新川 | Semiconductor die pick-up device |
| JP7497920B1 (en) | 2023-08-09 | 2024-06-11 | 株式会社新川 | Pickup unit, mounting device, and pickup method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7023590B2 (en) | 2022-02-22 |
| JP2020074397A (en) | 2020-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018182278A (en) | Pick-up apparatus and implementation apparatus for semiconductor chip | |
| JP5805411B2 (en) | Die bonder pickup method and die bonder | |
| KR101449834B1 (en) | Die bonding apparatus, die pickup apparatus and die pickup method | |
| KR101360635B1 (en) | Fabrication method of semiconductor device | |
| JP4156460B2 (en) | Work pickup method and apparatus, and mounting machine | |
| CN108400096B (en) | Semiconductor manufacturing apparatus and method for manufacturing semiconductor device | |
| KR102330577B1 (en) | Electronic component pickup apparatus and bonding apparatus | |
| JP2013065757A (en) | Pickup method of semiconductor chip and pickup device of semiconductor chip | |
| KR20120112010A (en) | Substrate transfer method and substrate transfer apparatus | |
| JP2021064813A (en) | Pickup device for semiconductor chip, and mount device and mount method for semiconductor chip | |
| JP2019047089A (en) | Semiconductor manufacturing device and manufacturing method of semiconductor device | |
| KR20200034600A (en) | Semiconductor manufacturing apparatus, push-up jig and method for manufacturing semiconductor device | |
| JP5254832B2 (en) | Wafer holding mechanism | |
| US20180226281A1 (en) | Pickup apparatus | |
| JP2014239090A (en) | Pickup system | |
| JP2013065628A (en) | Die bonder and die pickup device and die pickup method | |
| CN114792647A (en) | Chip mounting apparatus and method for manufacturing semiconductor device | |
| JP5214739B2 (en) | Chip peeling method, semiconductor device manufacturing method, and chip peeling apparatus | |
| JP2015053441A (en) | Die bonder and bonding method | |
| KR101231428B1 (en) | Placing mechanism, transport method of wafer having dicing frame and computer readable recording medium having program for transporting wafer used for this method | |
| JP7458773B2 (en) | Pick-up equipment and mounting equipment for electronic components | |
| JP7184006B2 (en) | Semiconductor chip pick-up jig, semiconductor chip pick-up device, and pick-up jig adjustment method | |
| CN112530834B (en) | Chip mounting apparatus, peeling unit, collet, and method for manufacturing semiconductor device | |
| JP5214390B2 (en) | Transport system | |
| JP2006165452A (en) | Chip bonding device and chip bonding method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201113 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210126 |