JP2017538526A - ロボットカニューレ及び封止アセンブリのためのアダプター - Google Patents
ロボットカニューレ及び封止アセンブリのためのアダプター Download PDFInfo
- Publication number
- JP2017538526A JP2017538526A JP2017532976A JP2017532976A JP2017538526A JP 2017538526 A JP2017538526 A JP 2017538526A JP 2017532976 A JP2017532976 A JP 2017532976A JP 2017532976 A JP2017532976 A JP 2017532976A JP 2017538526 A JP2017538526 A JP 2017538526A
- Authority
- JP
- Japan
- Prior art keywords
- cannula
- sealing assembly
- proximal
- tapered surface
- annular flange
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007789 sealing Methods 0.000 title claims abstract description 107
- 230000000295 complement effect Effects 0.000 claims abstract description 18
- 239000013536 elastomeric material Substances 0.000 claims description 23
- 239000012530 fluid Substances 0.000 claims description 19
- 239000000463 material Substances 0.000 claims description 9
- 238000004891 communication Methods 0.000 claims description 8
- 238000003780 insertion Methods 0.000 claims description 4
- 230000037431 insertion Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 description 8
- 238000001356 surgical procedure Methods 0.000 description 6
- 229920003023 plastic Polymers 0.000 description 5
- 239000004033 plastic Substances 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 3
- 239000012636 effector Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000002674 endoscopic surgery Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 208000005646 Pneumoperitoneum Diseases 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000002324 minimally invasive surgery Methods 0.000 description 2
- 241000272525 Anas platyrhynchos Species 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- 208000032544 Cicatrix Diseases 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 229920003295 Radel® Polymers 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 229920002492 poly(sulfone) Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000037387 scars Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000004083 survival effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3462—Trocars; Puncturing needles with means for changing the diameter or the orientation of the entrance port of the cannula, e.g. for use with different-sized instruments, reduction ports, adapter seals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/22—Valves or arrangement of valves
- A61M39/26—Valves closing automatically on disconnecting the line and opening on reconnection thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
- A61B2017/00486—Adaptors for coupling parts with incompatible geometries
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B17/3439—Cannulas with means for changing the inner diameter of the cannula, e.g. expandable
- A61B2017/3441—Cannulas with means for changing the inner diameter of the cannula, e.g. expandable with distal sealing means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3462—Trocars; Puncturing needles with means for changing the diameter or the orientation of the entrance port of the cannula, e.g. for use with different-sized instruments, reduction ports, adapter seals
- A61B2017/3464—Trocars; Puncturing needles with means for changing the diameter or the orientation of the entrance port of the cannula, e.g. for use with different-sized instruments, reduction ports, adapter seals with means acting on inner surface of valve or seal for expanding or protecting, e.g. inner pivoting fingers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Pulmonology (AREA)
- Surgical Instruments (AREA)
Abstract
Description
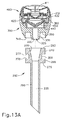
図1〜2は、低侵襲性手術の実施のためのアクセスポートを提供するようにサイズ調整される例示的なトロカール器具(10)を示す。トロカール器具(10)は、栓子(20)、カニューレ(30)、及び封止アセンブリ(400)を含む。栓子(20)は、操作者が把持するための栓子握り部(24)、シャフト部(23)、及び栓子先端部(22)を含む。図2に示すように、栓子(20)は、封止アセンブリ(400)及びカニューレ(30)を通して挿入されるように構成されており、これにより、栓子先端部(22)は、栓子先端部(22)がカニューレ(35)の遠位端を過ぎて遠位に延在する状態で、封止アセンブリ(400)及びカニューレ(30)を通過し、これによって、栓子先端部(22)が患者の組織層を貫通又は切開して、手術部位に隣接して開口部を提供することを可能にする。シャフト部(23)は、組織の貫通及び切開中に組織層が及ぼす力に持ちこたえるように剛性である。栓子先端部(22)は、栓子(20)が手術部位に向かって組織層を通して挿入されるとき、組織層の貫通又は切開を容易にするのに十分な圧力を提供するように構成され、したがって、トロカール器具(10)が内部手術部位に向かって挿入されるとき、組織の開口部を広げるように形作られる。
図8〜図9は、別の例示的なカニューレ(200)を示す。本実施例のカニューレ(200)は、米国特許第6,364,888号、米国特許第7,524,320号、及び米国特許第7,806,891号に記載されるロボット手術システムなどのロボット手術システムで使用するように構成されている。これらの特許のそれぞれの開示内容は、参照により本明細書に組み込まれる。ほんの一例として、カニューレ(200)は、以下の特許文献の教示の少なくとも一部に従って構築され、動作可能であってもよい。その開示内容が参照により本明細書に組み込まれる、2012年3月29日に公開された「Cannula」と題する米国公開第2012/0078245号。上述したカニューレ(30)と同様に、本実施例のカニューレ(200)は、中空シャフト(290)に至る近位の角度をなした開口部(230)、隆起部(280)、及び手術器具が手術部位にアクセスすることを可能にする開口先端部(220)を有する。中空シャフト(290)は、長手方向軸を画定する。しかしながら、カニューレ(200)は、これが封止アセンブリ(400)を支持するように構成された封止アセンブリハウジング(34)を有しないために、上述したカニューレ(30)とは異なる。カニューレ(200)の近位端で封止アセンブリハウジング(34)を有する代わりに、カニューレ取付けブラケット顎部(図示せず)と嵌合するように構成されている、2つの隆起した環状フランジ(240、265)と取付け部分(260)とがある。環状フランジ(240、265)は、中空シャフト(290)によって画定された長手方向軸に対して実質的に垂直である唇部(250、277、270、275)を画定する。カニューレ取付けブラケット顎部(図示せず)は、カニューレ(200)をロボット手術システムのマニプレータアーム(図示せず)に固定するために、環状フランジ(240、265)及び取付け部分(260)の周辺の途中まで達する。
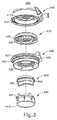
図11〜12は、患者の吹送された体腔内のニューモスタシスを維持しつつ、カニューレ(200)を封止アセンブリ(400)と接続するためのアダプター(300)を示す。アダプター(300)は、ハウジング床(370)、ハウジング傾斜面(390)、及びハウジング壁(395)によって画定された封止アセンブリハウジング(385)を含む。アダプタ(300)は、レーデル(Radel)などの硬質プラスチックから構成されており、封止アセンブリ(400)のねじ切り(425)と対応するねじ切り(360)を有する。当然ながら、多くの種類の硬質プラスチック材が使用されてもよく、当業者には明らかであるだろう。可能な硬質プラスチックのいくつかの例としては、SustaPEEK MG、Susta PEI MG、及びポリスルホンが挙げられるが、これらに限定されない。この対応するねじ切り(360、425)は、アダプター(300)の近位端(310)及び封止アセンブリ(400)の遠位表面(422)が一緒に連結し、ニューモスタシスを維持するために効果的な封止を創出することを可能にする。しかしながら、アダプター(300)は、封止アセンブリ(500)のねじ切り(530)とアダプター(300)のハウジング壁(395)との間に干渉を創出するように構成された寸法を有するエラストマー材で全体的に作製され、ニューモスタシスを維持するための封止を創出することも可能である。したがって、ねじ切り(360)は、アダプター(300)に必ずしも必要であるというわけではない。エラストマー材は、硬質プラスチックに加えて又は硬質プラスチックの代わりに使用されてもよい。アダプター(300)のいくつかの変形例において、Oリング(図示せず)などのエラストマー構成要素は、アダプター(300)の近位端(310)と封止アセンブリ(400)の遠位表面(422)との間に位置付けられ、近位端(310)と遠位表面(422)との間の封止を提供又は向上させて、ニューモスタシスを更に維持する。
本明細書に記載の教示、表現、実施形態、実施例などのうちのいずれか1つ又は2つ以上を、本明細書に記載の他の教示、表現、実施形態、実施例などのうちのいずれか1つ又は2つ以上と組み合わせることができる点が理解されるべきである。したがって、上記の教示、表現、実施形態、実施例などは、互いに対して独立して考慮されるべきではない。本明細書の教示に照らして、本明細書の教示を組み合わせることができる種々の好適な方法が、当業者には容易に明らかとなろう。かかる改変例及び変形例は、特許請求の範囲内に含まれることを意図される。
(1) (a)封止アセンブリハウジングであって、封止アセンブリハウジングが、近位端と遠位端とを備える、封止アセンブリハウジングと、
(b)チャネルであって、前記チャネルが、長手方向軸を画定し、前記チャネルが、近位端と遠位端とを備え、前記チャネルの前記近位端が、前記封止アセンブリハウジングの前記遠位端と流体連通する、チャネルと、
(c)前記チャネルの少なくとも前記遠位端を包囲する内側テーパ形状表面であって、前記内側テーパ形状表面が、近位端と遠位端とを備え、前記近位端が、前記遠位端よりも大きな周囲を有する、内側テーパ形状表面と、
(d)外側テーパ形状表面であって、前記外側テーパ形状表面が、近位端と遠位端とを備える、外側テーパ形状表面と、
(e)トロカールルーフであって、前記トロカールルーフが、前記内側テーパ形状表面及び前記外側テーパ形状表面の近位端の終端の間で画定されている、トロカールルーフと、を備える、装置。
(2) 前記装置が、エラストマー材で全体的に形成されている、実施態様1に記載の装置。
(3) 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部と締まりばめを提供するように構成されている、実施態様2に記載の装置。
(4) 前記外側テーパ形状表面が、前記カニューレの前記環状フランジの外周と干渉するように構成されている、実施態様3に記載の装置。
(5) 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの外周と締まりばめを提供するように構成されている、実施態様2に記載の装置。
(7) 前記装置が、ねじ切りを有する封止アセンブリを更に備え、前記封止アセンブリハウジングが、前記封止アセンブリの前記ねじ切りを補完するように構成されたねじ切りを更に備える、実施態様1に記載の装置。
(8) 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記内側テーパ形状表面が、エラストマー材を備え、前記エラストマー材が、前記カニューレの前記近位の角度をなした開口部と締まりばめを提供するように構成されている、実施態様1に記載の装置。
(9) 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記外側テーパ形状表面が、エラストマー材を備え、前記エラストマー材が、前記カニューレの前記環状フランジの前記外周と締まりばめを提供するように構成されている、実施態様1に記載の装置。
(10) 前記トロカールルーフの周りにオーバーモールドされたエラストマー材を更に備える、実施態様1に記載の装置。
(12) 前記トロカールルーフの前記表面を補完するように構成されたOリングを更に備える、実施態様1に記載の装置。
(13) 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記カニューレの前記近位の角度をなした開口部が、ねじ切りを備え、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部のねじ切りを補完するように構成されたねじ切りを更に備える、実施態様1に記載の装置。
(14) 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記環状フランジの前記外周が、ねじ切りを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの前記外周上のねじ切りを補完するように構成されたねじ切りを更に備える、実施態様1に記載の装置。
(15) 前記装置が、硬質材料から全体的に形成されている、実施態様1に記載の装置。
(17) 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記カニューレの前記近位の角度をなした開口部が、雌ねじ切りを備え、前記内側テーパ形状表面が、前記カニューレの前記近位開口部の前記雌ねじ切りを補完するように構成された雄ねじ切りを更に備える、実施態様16に記載の装置。
(18) 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記環状フランジの前記外周が、雄ねじ切りを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの前記外周の前記雄ねじ切りを補完するように構成された雌ねじ切りを更に備える、実施態様16に記載の装置。
(19) (a)カニューレであって、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備える、カニューレと、
(b)封止アセンブリであって、前記封止アセンブリが、近位端と遠位端とを有する、封止アセンブリと、
(c)アダプターであって、
(i)チャネルであって、前記チャネルが、近位端と遠位端とを備え、前記チャネルの前記近位端が、前記封止アセンブリの前記遠位端と流体連通し、前記チャネルの前記遠位端が、前記カニューレの前記近位の角度をなした開口部と流体連通する、チャネルと、
(ii)前記封止アセンブリの一部を受け入れるように構成された封止アセンブリハウジングであって、封止アセンブリハウジングが、近位端と遠位端とを備え、前記近位端が、環状表面を備え、前記環状表面が、前記アダプターと前記封止アセンブリとの間に封止を提供するように構成されている、封止アセンブリハウジングと、
(iii)前記チャネルの少なくとも前記遠位端を包囲する内側テーパ形状表面であって、前記内側テーパ形状表面が、近位端と遠位端とを備え、前記近位端が、前記遠位端よりも大きな周囲を有し、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部に挿入されるように構成されている、内側テーパ形状表面と、
(iv)前記環状フランジの少なくとも前記近位端を包囲する外側テーパ形状表面と、を備えるアダプターと、を備える、装置。
(20) (a)カニューレであって、前記カニューレが、近位開口部の周りに延在する環状フランジを備え、前記近位開口部が、側壁によって画定されている、カニューレと、
(b)封止アセンブリであって、前記封止アセンブリが、手術器具を受け入れるように構成された通路を画定し、前記封止アセンブリが、前記通路内に配設された手術器具に対して封止するように構成された少なくとも1つの封止部材を更に備える、封止アセンブリと、
(c)前記カニューレを前記封止アセンブリに連結するように構成されたアダプターと、を備え、前記アダプターが、
(i)前記近位開口部に位置付けられた第1のカニューレ取付け特徴部であって、前記カニューレ取付け特徴部が、前記近位開口部を画定する前記側壁に対して封止するように構成され、前記カニューレ取付け特徴部が、前記封止アセンブリの前記封止通路から前記カニューレの前記近位開口部に至る、器具の挿入のための経路を提供するように更に構成されている、第1のカニューレ取付け特徴部と、
(ii)前記環状フランジの周りに位置付けられた第2のカニューレ取付け特徴部と、を備える、装置。
Claims (20)
- (a)封止アセンブリハウジングであって、封止アセンブリハウジングが、近位端と遠位端とを備える、封止アセンブリハウジングと、
(b)チャネルであって、前記チャネルが、長手方向軸を画定し、前記チャネルが、近位端と遠位端とを備え、前記チャネルの前記近位端が、前記封止アセンブリハウジングの前記遠位端と流体連通する、チャネルと、
(c)前記チャネルの少なくとも前記遠位端を包囲する内側テーパ形状表面であって、前記内側テーパ形状表面が、近位端と遠位端とを備え、前記近位端が、前記遠位端よりも大きな周囲を有する、内側テーパ形状表面と、
(d)外側テーパ形状表面であって、前記外側テーパ形状表面が、近位端と遠位端とを備える、外側テーパ形状表面と、
(e)トロカールルーフであって、前記トロカールルーフが、前記内側テーパ形状表面及び前記外側テーパ形状表面の近位端の終端の間で画定されている、トロカールルーフと、を備える、装置。 - 前記装置が、エラストマー材で全体的に形成されている、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部と締まりばめを提供するように構成されている、請求項2に記載の装置。
- 前記外側テーパ形状表面が、前記カニューレの前記環状フランジの外周と干渉するように構成されている、請求項3に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの外周と締まりばめを提供するように構成されている、請求項2に記載の装置。
- 前記装置が、硬質材料で部分的に形成され、エラストマー材で部分的に形成されている、請求項1に記載の装置。
- 前記装置が、ねじ切りを有する封止アセンブリを更に備え、前記封止アセンブリハウジングが、前記封止アセンブリの前記ねじ切りを補完するように構成されたねじ切りを更に備える、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記内側テーパ形状表面が、エラストマー材を備え、前記エラストマー材が、前記カニューレの前記近位の角度をなした開口部と締まりばめを提供するように構成されている、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記外側テーパ形状表面が、エラストマー材を備え、前記エラストマー材が、前記カニューレの前記環状フランジの前記外周と締まりばめを提供するように構成されている、請求項1に記載の装置。
- 前記トロカールルーフの周りにオーバーモールドされたエラストマー材を更に備える、請求項1に記載の装置。
- 前記外側テーパ形状表面の周りにオーバーモールドされたエラストマー材を更に備え、前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記エラストマー材が、前記カニューレの前記環状フランジの前記外周と干渉するように構成されている、請求項1に記載の装置。
- 前記トロカールルーフの前記表面を補完するように構成されたOリングを更に備える、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記カニューレの前記近位の角度をなした開口部が、ねじ切りを備え、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部のねじ切りを補完するように構成されたねじ切りを更に備える、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記環状フランジの前記外周が、ねじ切りを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの前記外周上のねじ切りを補完するように構成されたねじ切りを更に備える、請求項1に記載の装置。
- 前記装置が、硬質材料から全体的に形成されている、請求項1に記載の装置。
- 前記装置が、雄ねじ切りを有する封止アセンブリを更に備え、前記封止アセンブリハウジングが、前記封止アセンブリの前記雄ねじ切りを補完するように構成された雌ねじ切りを更に備え、これにより、前記封止アセンブリの少なくとも一部が、前記封止アセンブリハウジング内に螺合するように構成されている、請求項1に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備え、前記カニューレの前記近位の角度をなした開口部が、雌ねじ切りを備え、前記内側テーパ形状表面が、前記カニューレの前記近位開口部の前記雌ねじ切りを補完するように構成された雄ねじ切りを更に備える、請求項16に記載の装置。
- 前記装置が、中空カニューレを更に備え、前記カニューレが、環状フランジを備え、前記環状フランジの前記外周が、雄ねじ切りを備え、前記外側テーパ形状表面が、前記カニューレの前記環状フランジの前記外周の前記雄ねじ切りを補完するように構成された雌ねじ切りを更に備える、請求項16に記載の装置。
- (a)カニューレであって、前記カニューレが、近位の角度をなした開口部を有する環状フランジを備える、カニューレと、
(b)封止アセンブリであって、前記封止アセンブリが、近位端と遠位端とを有する、封止アセンブリと、
(c)アダプターであって、
(i)チャネルであって、前記チャネルが、近位端と遠位端とを備え、前記チャネルの前記近位端が、前記封止アセンブリの前記遠位端と流体連通し、前記チャネルの前記遠位端が、前記カニューレの前記近位の角度をなした開口部と流体連通する、チャネルと、
(ii)前記封止アセンブリの一部を受け入れるように構成された封止アセンブリハウジングであって、封止アセンブリハウジングが、近位端と遠位端とを備え、前記近位端が、環状表面を備え、前記環状表面が、前記アダプターと前記封止アセンブリとの間に封止を提供するように構成されている、封止アセンブリハウジングと、
(iii)前記チャネルの少なくとも前記遠位端を包囲する内側テーパ形状表面であって、前記内側テーパ形状表面が、近位端と遠位端とを備え、前記近位端が、前記遠位端よりも大きな周囲を有し、前記内側テーパ形状表面が、前記カニューレの前記近位の角度をなした開口部に挿入されるように構成されている、内側テーパ形状表面と、
(iv)前記環状フランジの少なくとも前記近位端を包囲する外側テーパ形状表面と、を備えるアダプターと、を備える、装置。 - (a)カニューレであって、前記カニューレが、近位開口部の周りに延在する環状フランジを備え、前記近位開口部が、側壁によって画定されている、カニューレと、
(b)封止アセンブリであって、前記封止アセンブリが、手術器具を受け入れるように構成された通路を画定し、前記封止アセンブリが、前記通路内に配設された手術器具に対して封止するように構成された少なくとも1つの封止部材を更に備える、封止アセンブリと、
(c)前記カニューレを前記封止アセンブリに連結するように構成されたアダプターと、を備え、前記アダプターが、
(i)前記近位開口部に位置付けられた第1のカニューレ取付け特徴部であって、前記カニューレ取付け特徴部が、前記近位開口部を画定する前記側壁に対して封止するように構成され、前記カニューレ取付け特徴部が、前記封止アセンブリの前記封止通路から前記カニューレの前記近位開口部に至る、器具の挿入のための経路を提供するように更に構成されている、第1のカニューレ取付け特徴部と、
(ii)前記環状フランジの周りに位置付けられた第2のカニューレ取付け特徴部と、を備える、装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/576,431 US9888942B1 (en) | 2014-12-19 | 2014-12-19 | Adaptor for robotics cannula and seal assembly |
| US14/576,431 | 2014-12-19 | ||
| PCT/US2015/065493 WO2016100181A1 (en) | 2014-12-19 | 2015-12-14 | Adaptor for robotics cannula and seal assembly |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017538526A true JP2017538526A (ja) | 2017-12-28 |
| JP6672308B2 JP6672308B2 (ja) | 2020-03-25 |
Family
ID=55066849
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017532976A Active JP6672308B2 (ja) | 2014-12-19 | 2015-12-14 | ロボットカニューレ及び封止アセンブリのためのアダプター |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9888942B1 (ja) |
| EP (2) | EP3232957B1 (ja) |
| JP (1) | JP6672308B2 (ja) |
| CN (1) | CN107106207B (ja) |
| BR (1) | BR112017012984B1 (ja) |
| WO (1) | WO2016100181A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| EP3481313B1 (en) | 2016-07-11 | 2020-04-15 | CONMED Corporation | Cannula assembly for robotically assisted pressure regulated laparoscopic surgical procedures |
| WO2019136062A1 (en) * | 2018-01-04 | 2019-07-11 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| US11399906B2 (en) | 2019-06-27 | 2022-08-02 | Cilag Gmbh International | Robotic surgical system for controlling close operation of end-effectors |
| US11369443B2 (en) | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| US11607278B2 (en) | 2019-06-27 | 2023-03-21 | Cilag Gmbh International | Cooperative robotic surgical systems |
| US11612445B2 (en) | 2019-06-27 | 2023-03-28 | Cilag Gmbh International | Cooperative operation of robotic arms |
| US11376082B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Robotic surgical system with local sensing of functional parameters based on measurements of multiple physical inputs |
| US11723729B2 (en) | 2019-06-27 | 2023-08-15 | Cilag Gmbh International | Robotic surgical assembly coupling safety mechanisms |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11547468B2 (en) | 2019-06-27 | 2023-01-10 | Cilag Gmbh International | Robotic surgical system with safety and cooperative sensing control |
| US11376083B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Determining robotic surgical assembly coupling status |
| USD956219S1 (en) | 2020-07-10 | 2022-06-28 | Covidien Lp | Port apparatus |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| CN112075982A (zh) * | 2020-09-17 | 2020-12-15 | 苏州泰宝生物医疗科技有限公司 | 一种腹腔穿刺器 |
| WO2022070016A1 (en) * | 2020-09-30 | 2022-04-07 | Auris Health, Inc. | Robotic instrument alignment |
| CN112494121A (zh) * | 2020-12-25 | 2021-03-16 | 凌斌 | 腔镜用多相稳固适配腹壁穿刺器 |
| US11974829B2 (en) | 2021-06-30 | 2024-05-07 | Cilag Gmbh International | Link-driven articulation device for a surgical device |
| US11931026B2 (en) | 2021-06-30 | 2024-03-19 | Cilag Gmbh International | Staple cartridge replacement |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5385553A (en) | 1991-07-18 | 1995-01-31 | Applied Medical Resources Corporation | Trocar with floating septum seal |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5385572A (en) | 1992-11-12 | 1995-01-31 | Beowulf Holdings | Trocar for endoscopic surgery |
| US5449370A (en) | 1993-05-12 | 1995-09-12 | Ethicon, Inc. | Blunt tipped ultrasonic trocar |
| JP2665052B2 (ja) | 1993-05-14 | 1997-10-22 | エスアールアイ インターナショナル | 遠隔中心位置決め装置 |
| US5609604A (en) | 1995-10-16 | 1997-03-11 | Ethicon Endo-Surgery, Inc. | Trocar with improved blade attachment |
| US5709671A (en) | 1995-10-16 | 1998-01-20 | Ethicon Endo-Surgery, Inc. | Trocar having an improved tip configuration |
| US5628732A (en) | 1996-01-19 | 1997-05-13 | Ethicon Endo-Surgery, Inc. | Trocar with improved universal seal |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5820606A (en) | 1996-06-11 | 1998-10-13 | Origin Medsystems, Inc. | Reusable cannula with disposable seal |
| US5697913A (en) | 1996-08-09 | 1997-12-16 | Ethicon Endo-Surgery, Inc. | Trocar including cannula with stepped region |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US5817061A (en) | 1997-05-16 | 1998-10-06 | Ethicon Endo-Surgery, Inc. | Trocar assembly |
| US6231565B1 (en) | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US7824401B2 (en) | 2004-10-08 | 2010-11-02 | Intuitive Surgical Operations, Inc. | Robotic tool with wristed monopolar electrosurgical end effectors |
| EP1408846B1 (en) | 2001-06-29 | 2012-03-07 | Intuitive Surgical Operations, Inc. | Platform link wrist mechanism |
| US20040260244A1 (en) * | 2001-08-31 | 2004-12-23 | Piechowicz Michael E. | Seals for trocars |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US7377909B2 (en) | 2003-06-19 | 2008-05-27 | Claude L Rickerd | Connection assembly for use with splittable sheath |
| US7637896B2 (en) | 2005-03-30 | 2009-12-29 | Ethicon Endo-Surgery, Inc. | Obturator tip assembly for a trocar |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8728037B2 (en) | 2006-04-18 | 2014-05-20 | Ethicon Endo-Surgery, Inc. | Pleated trocar seal |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7976501B2 (en) * | 2007-12-07 | 2011-07-12 | Ethicon Endo-Surgery, Inc. | Trocar seal with reduced contact area |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| DE102009032188B4 (de) | 2009-07-07 | 2020-08-27 | Geuder Aktiengesellschaft | Vorrichtung zum Einführen eines Mediums oder eines Instruments in den menschlichen Körper |
| IT1396791B1 (it) * | 2009-11-26 | 2012-12-14 | Borla Ind | Connettore luer maschio valvolare |
| US8979883B2 (en) * | 2009-12-17 | 2015-03-17 | Covidien Lp | Obturator tip |
| US9173697B2 (en) | 2010-09-29 | 2015-11-03 | Intuitive Surgical Operations, Inc. | Surgical cannula for dissipating electric charge |
| US9814457B2 (en) | 2012-04-10 | 2017-11-14 | Ethicon Llc | Control interface for laparoscopic suturing instrument |
| US9572626B2 (en) | 2013-02-15 | 2017-02-21 | Intuitive Surgical Operations, Inc. | Actuated cannula seal |
-
2014
- 2014-12-19 US US14/576,431 patent/US9888942B1/en active Active
-
2015
- 2015-12-14 EP EP15817726.1A patent/EP3232957B1/en active Active
- 2015-12-14 WO PCT/US2015/065493 patent/WO2016100181A1/en active Application Filing
- 2015-12-14 EP EP20196059.8A patent/EP3769705A1/en active Pending
- 2015-12-14 JP JP2017532976A patent/JP6672308B2/ja active Active
- 2015-12-14 CN CN201580069245.2A patent/CN107106207B/zh active Active
- 2015-12-14 BR BR112017012984-1A patent/BR112017012984B1/pt active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| BR112017012984A2 (pt) | 2018-01-02 |
| EP3232957B1 (en) | 2020-09-16 |
| BR112017012984B1 (pt) | 2022-11-29 |
| EP3232957A1 (en) | 2017-10-25 |
| JP6672308B2 (ja) | 2020-03-25 |
| EP3769705A1 (en) | 2021-01-27 |
| CN107106207B (zh) | 2021-01-22 |
| CN107106207A (zh) | 2017-08-29 |
| WO2016100181A1 (en) | 2016-06-23 |
| US9888942B1 (en) | 2018-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6672308B2 (ja) | ロボットカニューレ及び封止アセンブリのためのアダプター | |
| JP5574807B2 (ja) | 複数のポートを有する柔軟なアクセス用アセンブリ | |
| RU2455954C2 (ru) | Складчатое уплотнение троакара | |
| EP2229900B1 (en) | Flexible port seal | |
| KR102282033B1 (ko) | 로봇 지원 방식 압력 제어형 복강경 수술용 캐뉼라 어셈블리 | |
| US20110295074A1 (en) | Methods and Devices for Providing Multiple Devices Access to a Surgical Site Through a Single Port | |
| US20100312061A1 (en) | Methods and devices for providing access through tissue to a surgical site | |
| US20110295077A1 (en) | Methods and Devices for Providing Multiple Devices Access to a Surgical Site Through a Single Port | |
| US9545264B2 (en) | Trocars and obturators | |
| JP2018535752A (ja) | 外科用エンドエフェクタ装填デバイス及びトロカール一体化 | |
| EP3420986B1 (en) | Trocar with oblique needle insertion port and coplanar stopcock | |
| JP2009066397A (ja) | 複合シールおよび製造方法 | |
| JP5607778B2 (ja) | 外科用シールアセンブリ | |
| US20210204978A1 (en) | Trocar with Reduced Profile | |
| US20110112375A1 (en) | Portal apparatus including conformable cup seal | |
| JP2010221031A (ja) | 回転可能なシールを含むアクセスポート | |
| WO2011150159A1 (en) | Methods and devices for providing multiple devices access to a surgical site through a single port |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181011 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190820 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200304 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6672308 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |