JP2017528357A - 車両と被牽引装備の間の旋回角検出装置および旋回角検出方法 - Google Patents
車両と被牽引装備の間の旋回角検出装置および旋回角検出方法 Download PDFInfo
- Publication number
- JP2017528357A JP2017528357A JP2016575818A JP2016575818A JP2017528357A JP 2017528357 A JP2017528357 A JP 2017528357A JP 2016575818 A JP2016575818 A JP 2016575818A JP 2016575818 A JP2016575818 A JP 2016575818A JP 2017528357 A JP2017528357 A JP 2017528357A
- Authority
- JP
- Japan
- Prior art keywords
- turning angle
- vehicle
- transmitter
- receiver
- towed equipment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 35
- 230000005672 electromagnetic field Effects 0.000 claims abstract description 25
- 238000011156 evaluation Methods 0.000 claims abstract description 17
- 238000000034 method Methods 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/58—Auxiliary devices
- B60D1/62—Auxiliary devices involving supply lines, electric circuits, or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/24—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions
- B60D1/30—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions for sway control, e.g. stabilising or anti-fishtail devices; Sway alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/01—Traction couplings or hitches characterised by their type
- B60D1/06—Ball-and-socket hitches, e.g. constructional details, auxiliary devices, their arrangement on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/24—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions
- B60D1/245—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions for facilitating push back or parking of trailers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D13/00—Steering specially adapted for trailers
- B62D13/06—Steering specially adapted for trailers for backing a normally drawn trailer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
Abstract
Description
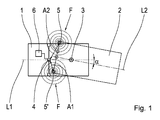
2, 2’ 被牽引装備、作業インプルメント
3, 3’ 連結器
4, 4’ 受信器
5, 5’ 送信器
6 評価ユニット
7 旋回台
A1, A2 間隔
F 電磁場
L1 車両縦軸
L2 被牽引装備縦軸
L3, L4 作業インプルメント縦軸
Ld 旋回台縦軸
α, α1, α2, α3, α4, α5 旋回角
Claims (11)
- 車両(1)と、該車両(1)に連結された被牽引装備(2, 2’)の間の旋回角(α)を検出する、旋回角検出装置であって、
電磁場(F)を発生するよう構成された送信器(5, 5’)、および前記電磁場(F)の場の強度を探知するよう構成された受信器(4, 4’)を備え、
前記送信器(5, 5’)および前記受信器(4, 4’)は、前記旋回角(α)の変化が、旋回角に依存し、前記受信器(4, 4’)に探知される前記場の強度の変化へと作用するよう、前記車両(1)および前記被牽引装備(2, 2’)上で互いに対して配置され、
および探知された前記場の強度により前記旋回角(α)を検出する、評価ユニット(6)を備えることを特徴とする旋回角検出装置。 - 請求項1に記載の旋回角検出装置であって、少なくとも2つの送信器(5, 5’)を備え、第1送信器(5)は、前記車両(1)または前記被牽引装備(2, 2’)の第1側面の直立した領域に配置され、および第2送信器(5’)は、前記車両(1)または前記被牽引装備(2, 2’)の、前記第1側面に対向する第2側面の直立した領域に配置されている旋回角検出装置。
- 請求項2に記載の旋回角検出装置であって、前記受信器(4, 4’)は、車両縦軸(L1)または被牽引装備縦軸(L2)上に配置されている旋回角検出装置。
- 請求項1または2に記載の旋回角検出装置であって、少なくとも2つの受信器(4, 4’)を備え、第1受信器(4)は、前記車両(1)または前記被牽引装備(2, 2’)の第1側面の直立した領域に配置され、および第2受信器は、前記車両(1)または前記被牽引装備(2, 2’)の、前記第1側面に対向する第2側面の直立した領域に配置されている旋回角検出装置。
- 請求項4に記載の旋回角検出装置であって、前記送信器(5, 5’)は、車両縦軸(L1)または被牽引装備縦軸(L2)上に配置されている旋回角検出装置。
- 請求項1に記載の旋回角検出装置であって、前記送信器(5, 5’)は、車両縦軸(L1)と被牽引装備縦軸(L2)の一方の縦軸上に配置され、および前記受信器(4, 4’)は、前記車両縦軸(L1)と前記被牽引装備縦軸(L2)の各他方の縦軸上に配置されている旋回角検出装置。
- 請求項1〜6の何れか一項に記載の旋回角検出装置であって、送信器(5, 5’)は、Bluetooth(登録商標)送信器、RFID送信器、WLAN送信器またはNFC送信器である旋回角検出装置。
- 請求項1〜7の何れか一項に記載の旋回角検出装置用の送信器(5, 5’)。
- 請求項1〜7の何れか一項に記載の旋回角検出装置用の受信器(4, 4’)。
- 請求項1〜7の何れか一項に記載の旋回角検出装置用の評価ユニット(6)。
- 車両(1)と、該車両(1)に連結された被牽引装備(2, 2’)の間の旋回角検出方法であって、
送信器(5, 5’)が電磁場(F)を発生し、受信器(4, 4’)が該電磁場の場の強度を探知し、
前記送信器(5, 5’)および受信器(4, 4’)を、前記旋回角(α)の変化が、旋回角に依存し、前記受信器(4, 4’)が探知する前記場の強度の変化となるよう、前記車両(1)および前記被牽引装備(2)上で互いに対して配置し、
および探知した前記場の強度から前記旋回角(α)を検出することを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014212821.8 | 2014-07-02 | ||
| DE102014212821.8A DE102014212821A1 (de) | 2014-07-02 | 2014-07-02 | Vorrichtung und Verfahren zur Erfassung eines Schwenkwinkels zwischen einem Fahrzeug und einer Anhängervorrichtung |
| PCT/EP2015/062215 WO2016000893A1 (de) | 2014-07-02 | 2015-06-02 | Vorrichtung und verfahren zur erfassung eines schwenkwinkels zwischen einem fahrzeug und einer anhängervorrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017528357A true JP2017528357A (ja) | 2017-09-28 |
| JP6603677B2 JP6603677B2 (ja) | 2019-11-06 |
Family
ID=53404504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016575818A Expired - Fee Related JP6603677B2 (ja) | 2014-07-02 | 2015-06-02 | 車両と被牽引装備の間の旋回角検出装置および旋回角検出方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10414221B2 (ja) |
| EP (1) | EP3164276A1 (ja) |
| JP (1) | JP6603677B2 (ja) |
| CN (1) | CN106536234B (ja) |
| BR (1) | BR112016028825A2 (ja) |
| DE (1) | DE102014212821A1 (ja) |
| WO (1) | WO2016000893A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021525367A (ja) * | 2018-05-29 | 2021-09-24 | コンチネンタル オートモーティヴ ゲゼルシャフト ミット ベシュレンクテル ハフツングContinental Automotive GmbH | 車両パラメータを求めるための方法および装置 |
| JP2022144144A (ja) * | 2021-03-18 | 2022-10-03 | 日本フルハーフ株式会社 | 連結トラック |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10863335B2 (en) * | 2016-03-04 | 2020-12-08 | Magna Electronics Inc. | Vehicle trailer angle detection system using short range communication devices |
| US9738125B1 (en) | 2016-05-17 | 2017-08-22 | Horizon Global Americas Inc. | Communication device, system, and method for active control of external vehicle components |
| EP3251878A1 (en) | 2016-05-30 | 2017-12-06 | VBG Group AB (Publ) | Trailer coupling with magnetic angular sensor |
| DE102016218603A1 (de) | 2016-09-27 | 2018-03-29 | Jost-Werke Deutschland Gmbh | Vorrichtung zur Positionserkennung eines ersten oder zweiten miteinander zu kuppelnden Fahrzeugs |
| WO2018070393A1 (ja) * | 2016-10-12 | 2018-04-19 | 株式会社クボタ | 作業機の通信システム |
| CH713154A2 (de) | 2016-11-23 | 2018-05-31 | Scharmueller Gmbh & Co Kg | Vorrichtung zur Messung eines Knickwinkels und Fahrzeug. |
| DE102019106275A1 (de) * | 2019-03-12 | 2020-09-17 | Wabco Gmbh | Erfassungssystem und Verfahren zum Ermitteln eines Knickwinkels zwischen zwei Teilfahrzeugen eines Fahrzeug-Gespanns sowie Fahrzeug- Gespann |
| DE102020202593A1 (de) | 2020-02-28 | 2021-09-02 | Robert Bosch Gesellschaft mit beschränkter Haftung | System und Verfahren zum Betreiben eines Gespanns mit einem Zugfahrzeug und einem Anhänger sowie Computerprogrammprodukt |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120185131A1 (en) * | 2011-01-13 | 2012-07-19 | Continental Automotive Systems, Inc. | System and method for maneuvering a vehicle-trailer unit in reverse travel |
| US20140172232A1 (en) * | 2011-04-19 | 2014-06-19 | Ford Global Technologies, Llc | Sensor system and method for monitoring trailer hitch angle |
| DE102014204924A1 (de) * | 2013-03-20 | 2014-09-25 | Ford Global Technologies, Llc | Kupplungswinkelbestimmung |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2722183B2 (ja) * | 1995-06-07 | 1998-03-04 | 輸送機工業株式会社 | セミトレーラの連結角度検出装置 |
| DE19964045A1 (de) * | 1999-12-30 | 2001-07-05 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Ermittlung des Knickwinkels zwischen einem Vorderwagen und einem Auflieger eines Fahrzeugs |
| DE10111529A1 (de) | 2001-03-10 | 2002-09-12 | Deere & Co | Vorrichtung zum Koppeln eines Gerätes an einem Arbeitsfahrzeug |
| DE10122562C1 (de) | 2001-05-10 | 2002-07-25 | Daimler Chrysler Ag | Reflektoranordnung für Fahrdynamikregelung, Rangierhilfe sowie Einkuppelhilfe für Gliederzüge mit gelenktem Anhänger |
| DE102004025252B4 (de) | 2004-05-22 | 2009-07-09 | Daimler Ag | Anordnung zur Bestimmung des Gespannwinkels eines Gliederzugs |
| DE102004059596B4 (de) * | 2004-12-09 | 2007-11-08 | Daimlerchrysler Ag | Verfahren zum Ermitteln eines Knickwinkels eines Fahrzeuggespanns sowie entsprechende Vorrichtung |
| DE102006040879B4 (de) | 2006-08-31 | 2019-04-11 | Bayerische Motoren Werke Aktiengesellschaft | Einpark- und Rückfahrhilfe |
| DE102006056408B4 (de) * | 2006-11-29 | 2013-04-18 | Universität Koblenz-Landau | Verfahren zum Bestimmen einer Position, Vorrichtung und Computerprogrammprodukt |
| US8013759B1 (en) * | 2007-04-12 | 2011-09-06 | Aid James D | Towing monitor system |
| DE102009028000A1 (de) * | 2009-07-24 | 2011-01-27 | Zf Friedrichshafen Ag | Lenkvorrichtung für ein Anhängerfahrzeug |
| US9854209B2 (en) * | 2011-04-19 | 2017-12-26 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| DE102012214201A1 (de) * | 2012-08-09 | 2014-05-22 | Bayerische Motoren Werke Aktiengesellschaft | Positionierung mit funkbasiertem Schließsystem |
| US20150314818A1 (en) * | 2014-04-30 | 2015-11-05 | Dwight Gaston | Trailer alignment guide device |
-
2014
- 2014-07-02 DE DE102014212821.8A patent/DE102014212821A1/de not_active Withdrawn
-
2015
- 2015-06-02 JP JP2016575818A patent/JP6603677B2/ja not_active Expired - Fee Related
- 2015-06-02 BR BR112016028825A patent/BR112016028825A2/pt not_active Application Discontinuation
- 2015-06-02 US US15/322,363 patent/US10414221B2/en not_active Expired - Fee Related
- 2015-06-02 CN CN201580033325.2A patent/CN106536234B/zh not_active Expired - Fee Related
- 2015-06-02 EP EP15729369.7A patent/EP3164276A1/de not_active Ceased
- 2015-06-02 WO PCT/EP2015/062215 patent/WO2016000893A1/de active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120185131A1 (en) * | 2011-01-13 | 2012-07-19 | Continental Automotive Systems, Inc. | System and method for maneuvering a vehicle-trailer unit in reverse travel |
| JP2014502582A (ja) * | 2011-01-13 | 2014-02-03 | コンチネンタル オートモーティブ システムズ インコーポレイテッド | 後退移動中に車両−トレーラユニットを操作するシステムおよび方法 |
| US20140172232A1 (en) * | 2011-04-19 | 2014-06-19 | Ford Global Technologies, Llc | Sensor system and method for monitoring trailer hitch angle |
| DE102014204924A1 (de) * | 2013-03-20 | 2014-09-25 | Ford Global Technologies, Llc | Kupplungswinkelbestimmung |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021525367A (ja) * | 2018-05-29 | 2021-09-24 | コンチネンタル オートモーティヴ ゲゼルシャフト ミット ベシュレンクテル ハフツングContinental Automotive GmbH | 車両パラメータを求めるための方法および装置 |
| JP7114746B2 (ja) | 2018-05-29 | 2022-08-08 | コンチネンタル オートモーティヴ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 車両パラメータを求めるための方法および装置 |
| JP2022144144A (ja) * | 2021-03-18 | 2022-10-03 | 日本フルハーフ株式会社 | 連結トラック |
| JP7423166B2 (ja) | 2021-03-18 | 2024-01-29 | 日本フルハーフ株式会社 | 連結トラック |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112016028825A2 (pt) | 2017-08-22 |
| CN106536234A (zh) | 2017-03-22 |
| JP6603677B2 (ja) | 2019-11-06 |
| US20170136839A1 (en) | 2017-05-18 |
| CN106536234B (zh) | 2019-06-25 |
| WO2016000893A1 (de) | 2016-01-07 |
| EP3164276A1 (de) | 2017-05-10 |
| DE102014212821A1 (de) | 2016-01-07 |
| US10414221B2 (en) | 2019-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6603677B2 (ja) | 車両と被牽引装備の間の旋回角検出装置および旋回角検出方法 | |
| CN111051087B (zh) | 用于识别挂车并辅助牵引机的挂接过程的系统 | |
| US9403413B2 (en) | Systems and methods to assist in coupling a vehicle to a trailer | |
| US10126755B1 (en) | Method, apparatus and system for wireless automotive trailer assist in various maneuvers | |
| CN109843611B (zh) | 用于检测待联接在一起的第一或第二车辆的位置的装置 | |
| CN111065530B (zh) | 用于安装在挂车上的挂车控制器 | |
| EP2161589B1 (en) | Determination of relative position of two relatively movable elements | |
| JP7450655B2 (ja) | 高速デュアルチャネル無線非接触ロータリージョイントを備えた導波路装置 | |
| US20190056492A1 (en) | Method for monitoring a surrounding area of a vehicle-trailer combination, monitoring device, driver assistance system and vehicle-trailer combination | |
| KR101720224B1 (ko) | 타이어 공기압 경보 장치 및 방법 | |
| CN108688590B (zh) | 无线车辆-拖车接口系统 | |
| WO2020236385A1 (en) | Tractor trailer vehicle area network with trailer sub-network | |
| CN114079889A (zh) | 用于在至少两个前后相继行驶的车辆之间进行通信的方法以及具有至少一个通信设备的车辆 | |
| CN206426764U (zh) | 智能蓝牙胎况侦测设备 | |
| JP5335404B2 (ja) | 連結車両、連結車両の制御方法およびプログラム | |
| US7920057B2 (en) | Method and device for localization of the position of a wheel of a vehicle | |
| CN105445728B (zh) | 预警方法及车用雷达系统 | |
| CN109018115A (zh) | 一种基于路面监测的骑行共享提示系统 | |
| JP6386333B2 (ja) | 通信装置 | |
| JP7100768B2 (ja) | チップから導波路ユニットまで送信される信号の不所望の偏波のフィルタリング | |
| CN202499564U (zh) | 一种露天矿卡车装载对位装置 | |
| EP4291915B1 (en) | Data network for a vehicle combination | |
| US20240069157A1 (en) | Methods and Systems for using Interference to Detect Sensor Impairment | |
| JP2008311728A (ja) | 狭域通信システム、狭域通信車載器、送信機および移動体用受信機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180509 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6603677 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |