JP2017521985A - 動的電気車両充電システムの電力制御のためのデバイス、システムおよび方法 - Google Patents
動的電気車両充電システムの電力制御のためのデバイス、システムおよび方法 Download PDFInfo
- Publication number
- JP2017521985A JP2017521985A JP2016562542A JP2016562542A JP2017521985A JP 2017521985 A JP2017521985 A JP 2017521985A JP 2016562542 A JP2016562542 A JP 2016562542A JP 2016562542 A JP2016562542 A JP 2016562542A JP 2017521985 A JP2017521985 A JP 2017521985A
- Authority
- JP
- Japan
- Prior art keywords
- power
- electric vehicle
- controller
- charging
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
- B60L53/122—Circuits or methods for driving the primary coil, e.g. supplying electric power to the coil
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
- B60L53/126—Methods for pairing a vehicle and a charging station, e.g. establishing a one-to-one relation between a wireless power transmitter and a wireless power receiver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/305—Communication interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/66—Data transfer between charging stations and vehicles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/005—Mechanical details of housing or structure aiming to accommodate the power transfer means, e.g. mechanical integration of coils, antennas or transducers into emitting or receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/40—Circuit arrangements or systems for wireless supply or distribution of electric power using two or more transmitting or receiving devices
- H02J50/402—Circuit arrangements or systems for wireless supply or distribution of electric power using two or more transmitting or receiving devices the two or more transmitting or the two or more receiving devices being integrated in the same unit, e.g. power mats with several coils or antennas with several sub-antennas
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/40—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries characterised by the exchange of charge or discharge related data
- H02J7/42—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries characterised by the exchange of charge or discharge related data with electronic devices having internal batteries, e.g. mobile phones
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/70—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries characterised by the mechanical construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/90—Regulation of charging or discharging current or voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
ベースパッド615を介したその電流の供給を試行する。しかしながらベース電流要求の場合、車両電池670は、車両電池670を充電する際により小さい電流を引き出すことになり(電池のインピーダンスが大きくなるため)、したがって変化する受電電流に適応するために頻繁な新しい電流要求が必要になる。したがって以下で説明する実施形態によれば、車両コントローラ675は、電流要求ではなく、電力要求を送る際に、より少ない頻度でベースコントローラ620と通信することができ、それによりワイヤレス充電システム600全体に対するワイヤレス通信遅延625の影響を小さくすることができる。
れらのシステムを調整することができる。いくつかの実施形態では、力率修正ユニット605およびDC-LF AC電圧コンバータ/インバータ610調整は、次いで、ベースパッド615の電力アンテナ回路に電流または電圧を送配する電流発生器または電圧発生器を調整し、それにより、調整された入力電力要求により良好に合致することができる電力を伝達するための磁場645が生成される。いくつかの実施形態では、電力アンテナ回路の電流発生器または電圧発生器は、外部電源601、力率修正ユニット605および/またはDC-LF AC電圧コンバータ/インバータ610を備えることができる。図6に示されているワイヤレス充電システム600とは対照的に、ワイヤレス充電システム700は、測定された入力電力に基づいて、また、効率推定器721からの電力効率係数に基づいて入力電力を調整し、したがってワイヤレス電力送電器システム649は、ワイヤレス電力受電器システム699からのフィードバックを当てにするのではなく、測定された電力の変化に反応することができる。
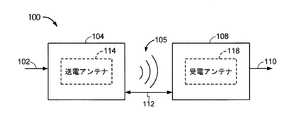
102 入力電力
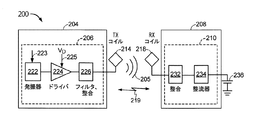
104、204 送電器
105、205、535、535a、535b、535c、535d ワイヤレス場
108、208 受電器
110 出力電力
112 送電器および受電器の分離距離
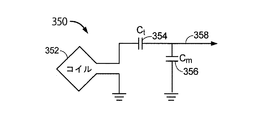
114、214、352 送電アンテナすなわちコイル(アンテナ)
118 受電アンテナすなわちコイル
206 送電回路機構
210 受電回路機構
218 受電アンテナ
219 通信チャネル
222 発振器
223 周波数制御信号
224 ドライバ回路
225 入力電圧信号(VD)
226 フィルタおよび整合回路
232 整合回路
234 整流器回路
236 電池
350 送電または受電回路機構
354、356 コンデンサ
358 信号
400、500、550 動的ワイヤレス充電システム
505 電気車両
506 電力受電パッド
510、510a、510b、510c 近接デバイス
515、515a、515b、515c、515d、615 充電ベースパッド(ベースパッド)
520 電気車両支援機器(EVSE)
525 車道
530 充電ベースパッドコントローラ
531 主電源ユニット
532 主構造基盤
575 送電塔
600、700、800、900、1000、1200 ワイヤレス充電システム
601 外部電源
602、665、965 電圧/電流測定ユニット
605 力率修正ユニット
610 DC低周波(LF)AC電圧コンバータ/インバータ
620、720、920、1020、1220 ベースコントローラ
625 ワイヤレス通信遅延
630、721、921、1021 効率推定器
645 磁場
649 ワイヤレス電力送電器システム
650 車両パッド
655 LF AC-DCコンバータ
660 電力調整/管理ユニット
670 車両電池
675、775、975、1075 車両コントローラ
680、724、923、1080 比較器
685、726 比例-積分-微分(PID)コントローラ利得
699 ワイヤレス電力受電器システム
922 効率割算器
925 効率掛算器
1221 入力/出力比推定器
1222 比率割算器
Claims (30)
- 電気車両をワイヤレス充電するための装置であって、
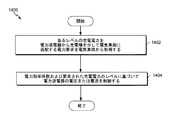
あるレベルの充電電力を電力アンテナ回路から充電場を介して前記電気車両に送配する要求を取得するように構成された通信受信機と、
前記通信受信機に動作結合され、かつ、電力効率係数および前記要求された充電電力のレベルに基づいて前記電力アンテナ回路の電流発生器または電圧発生器を制御するように構成されたコントローラと
を備える装置。 - 前記電力効率係数が、少なくとも部分的に、前記コントローラによる検索が可能なあらかじめプログラムされた値に基づく、請求項1に記載の装置。
- 前記あらかじめプログラムされた値が、異なる充電電力レベルのための異なるあらかじめプログラムされた値を含むルックアップテーブルの値を含む、請求項2に記載の装置。
- 前記電力効率係数が、前記電力アンテナ回路によって前記電気車両の受電アンテナおよび整流器回路に送配される少なくとも電力の効率の決定を含む、請求項1に記載の装置。
- 前記コントローラが、第1の時間期間の間の前記電気車両における出力電力測定値に関する情報に無関係に前記電力効率係数を決定するように構成される、請求項4に記載の装置。
- 前記電力アンテナ回路の電流または電圧を測定するように構成されたセンサをさらに備える、請求項1に記載の装置。
- 前記コントローラが、前記電力アンテナ回路の前記測定された電流または電圧に基づいて前記電力効率係数を調整するようにさらに構成される、請求項6に記載の装置。
- 前記通信受信機が、前記電気車両から出力電力測定値または出力誤差値を受け取るようにさらに構成される、請求項1に記載の装置。
- 前記コントローラが、前記出力電力測定値または前記出力誤差値に基づいて前記電力効率係数を調整するようにさらに構成される、請求項8に記載の装置。
- 前記コントローラが、第1の時間期間の間、前記電力効率係数に基づいて前記電流発生器または電圧発生器を制御するようにさらに構成され、前記出力電力測定値が前記第1の時間期間の後、受け取られる、請求項8に記載の装置。
- 前記出力誤差値が、前記電気車両の前記出力電力測定値と前記要求された充電電力のレベルとの間の差を含み、前記出力電力測定値が、前記電力アンテナ回路から前記電気車両の負荷に送配される充電電力のレベルの測定値を含む、請求項8に記載の装置。
- 前記コントローラが、前記電力アンテナ回路の入力電力と前記出力電力測定値の比率に基づいて前記電力アンテナ回路の前記電流発生器または電圧発生器を制御するようにさらに構成される、請求項8に記載の装置。
- 前記比率の初期値が、前記コントローラによる検索が可能なあらかじめプログラムされた値を含む、請求項12に記載の装置。
- 前記コントローラが、前記出力電力測定値または前記出力誤差値に基づいて前記比率を調整するようにさらに構成される、請求項12に記載の装置。
- 前記コントローラが、前記電気車両の前記電力アンテナ回路すなわち受電回路の電気特性の変化に基づいて前記電力アンテナ回路の前記電流発生器または電圧発生器を制御するようにさらに構成される、請求項1に記載の装置。
- 前記電気特性が、電流、またはインピーダンス、または電圧、または抵抗、またはインダクタンス、または共振周波数、または位相、またはそれらの任意の組合せのうちの少なくとも1つを含む、請求項15に記載の装置。
- 電気車両をワイヤレス充電するための方法であって、
あるレベルの充電電力を電力送電器から充電場を介して前記電気車両に送配する要求を前記電気車両から取得するステップと、
電力効率係数および前記要求された充電電力のレベルに基づいて前記電力送電器の電流または電圧を制御するステップと
を含む方法。 - 前記電力効率係数が、少なくとも部分的に、コントローラによる検索が可能なあらかじめプログラムされた値に基づく、請求項17に記載の方法。
- 前記電力効率係数が、電力アンテナ回路によって前記電気車両の受電アンテナおよび整流器回路に送配される少なくとも電力の効率の決定を含む、請求項17に記載の方法。
- 前記電力送電器の測定された電流または電圧に基づいて前記電力効率係数を調整するステップをさらに含む、請求項17に記載の方法。
- 前記電気車両から出力電力測定値または出力誤差値を受け取るステップをさらに含む、請求項17に記載の方法。
- 前記出力電力測定値または前記出力誤差値に基づいて前記電力効率係数を調整するステップをさらに含む、請求項21に記載の方法。
- 前記電力送電器の電流または電圧を制御するステップが、電力アンテナ回路の入力電力と前記出力電力測定値の比率に基づいて前記電力送電器の電流または電圧を制御するステップを含む、請求項21に記載の方法。
- 前記電力送電器の電流または電圧を制御するステップが、前記出力電力測定値または前記出力誤差値に基づいて前記電力送電器の電流または電圧を制御するステップを含む、請求項23に記載の方法。
- 前記電力送電器の電流または電圧を制御するステップが、前記電力送電器または前記電気車両の電気特性の変化に基づいて前記電力送電器の電流または電圧を制御するステップを含む、請求項17に記載の方法。
- 前記電気特性が、電流、またはインピーダンス、または電圧、または抵抗、またはインダクタンス、または共振周波数、または位相、またはそれらの任意の組合せのうちの少なくとも1つを含む、請求項25に記載の方法。
- 電気車両をワイヤレス充電するための装置であって、
あるレベルの充電電力を電力アンテナ回路から充電場を介して前記電気車両に送配する要求を前記電気車両から取得するための手段と、
電力効率係数および前記要求された充電電力のレベルに基づいて前記電力アンテナ回路の電流または電圧を制御するための手段と
を備える装置。 - 前記取得するための手段が受電器を備え、前記制御するための手段がコントローラを備える、請求項27に記載の装置。
- 前記電力アンテナ回路の測定された電流または電圧に基づく前記電力効率係数の調整をさらに含む、請求項27に記載の装置。
- 前記電気車両から出力電力測定値または出力誤差値を受け取るための手段と、
前記出力電力測定値または前記出力誤差値に基づいて前記電力効率係数を調整するための手段と
をさらに備える、請求項27に記載の装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461981630P | 2014-04-18 | 2014-04-18 | |
| US61/981,630 | 2014-04-18 | ||
| US14/472,856 | 2014-08-29 | ||
| US14/472,856 US9608465B2 (en) | 2014-04-18 | 2014-08-29 | Devices, systems, and method for power control of dynamic electric vehicle charging systems |
| PCT/US2015/019953 WO2015160451A1 (en) | 2014-04-18 | 2015-03-11 | Devices, systems, and method for power control of dynamic electric vehicle charging systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017521985A true JP2017521985A (ja) | 2017-08-03 |
| JP2017521985A5 JP2017521985A5 (ja) | 2018-04-12 |
Family
ID=54322808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016562542A Pending JP2017521985A (ja) | 2014-04-18 | 2015-03-11 | 動的電気車両充電システムの電力制御のためのデバイス、システムおよび方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9608465B2 (ja) |
| EP (1) | EP3116743B1 (ja) |
| JP (1) | JP2017521985A (ja) |
| KR (1) | KR20160147747A (ja) |
| CN (1) | CN106232417B (ja) |
| BR (1) | BR112016024222A2 (ja) |
| WO (1) | WO2015160451A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017208498A1 (ja) * | 2016-05-30 | 2019-04-04 | パナソニックIpマネジメント株式会社 | 非接触給電システム及び非接触電力伝送システム |
| JP2019057990A (ja) * | 2017-09-20 | 2019-04-11 | トヨタ自動車株式会社 | 非接触給電システム及び受電側装置 |
| JP2019526219A (ja) * | 2013-12-31 | 2019-09-12 | エレクトリック ロード リミテッド | 無線電力伝送を介して道路上の電気自動車に電力を供給するためのシステムおよび方法 |
| JP2020195176A (ja) * | 2019-05-27 | 2020-12-03 | 株式会社デンソー | 走行中給電システム |
| JP2021108515A (ja) * | 2019-12-27 | 2021-07-29 | オムロン株式会社 | 共振発振回路及び非接触給電システム |
| CN115489332A (zh) * | 2021-06-17 | 2022-12-20 | 丰田自动车株式会社 | 车辆及非接触供电系统 |
| JP2023001045A (ja) * | 2021-06-17 | 2023-01-04 | トヨタ自動車株式会社 | 車両及び非接触給電システム |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2721524T3 (es) * | 2015-05-19 | 2019-08-01 | Panasonic Ip Man Co Ltd | Aparato de suministro de potencia sin contacto y aparato de recepción de potencia sin contacto, y sistema de transmisión de potencia sin contacto proporcionado con los mismos |
| US10759281B2 (en) * | 2016-01-19 | 2020-09-01 | Ford Global Technologies, Llc | Controlling operation of electrified vehicle travelling on inductive roadway to influence electrical grid |
| US10461587B2 (en) | 2016-09-19 | 2019-10-29 | Witricity Corporation | Methods and apparatus for positioning a vehicle using foreign object detection |
| US10396598B2 (en) | 2016-09-22 | 2019-08-27 | Qualcomm Incorporated | Methods and apparatus for wireless power and communication transfer |
| CN106787240B (zh) * | 2016-11-29 | 2019-03-26 | 哈尔滨工业大学 | 基于阵列线圈式无线能量传输的复用型lcl结构及该结构的工作方法 |
| CN106696738B (zh) * | 2016-12-28 | 2019-05-10 | 华为技术有限公司 | 一种电动汽车的无线充电方法、装置及系统 |
| KR101847330B1 (ko) * | 2017-01-10 | 2018-04-10 | 영남대학교 산학협력단 | 레이저를 이용한 전력 전송 시스템 및 방법 |
| CN106891758A (zh) * | 2017-01-23 | 2017-06-27 | 斑马信息科技有限公司 | 汽车无线充电系统及其充电服务方法 |
| EP3577669A4 (en) * | 2017-02-03 | 2020-10-21 | AMI Research & Development, LLC | ELECTRIC VEHICLE CHARGING BY RF FRAME ANTENNAS TO AVOID A NEED FOR PRECISE ALIGNMENT WITH WIRELESS CHARGING EQUIPMENT |
| US10401525B2 (en) * | 2017-03-08 | 2019-09-03 | GM Global Technology Operations LLC | Wireless power quality alert for delayed charging with electric vehicles |
| US10421368B2 (en) * | 2017-04-26 | 2019-09-24 | Witricity Corporation | Static power derating for dynamic charging |
| CN107097670A (zh) * | 2017-05-03 | 2017-08-29 | 南京农业大学 | 一种多原边绕阻并联的电动汽车无线充电装置 |
| JPWO2018221532A1 (ja) * | 2017-06-02 | 2020-04-02 | 日本電産株式会社 | 送電装置、無線電力伝送システム、および制御装置 |
| US10343536B2 (en) | 2017-08-07 | 2019-07-09 | Cisco Technology, Inc. | Intelligent coil control for vehicle wireless power transfer (WPT) |
| US10369893B2 (en) * | 2017-08-07 | 2019-08-06 | Cisco Technology, Inc. | Intelligent vehicle control for wireless power transfer (WPT) |
| WO2019039946A1 (en) * | 2017-08-25 | 2019-02-28 | Apple Inc. | WIRELESS POWER TRANSFER CONTROL |
| CN108306386A (zh) * | 2018-02-24 | 2018-07-20 | 常州云创环境科技有限公司 | 安装于户外照明灯具上的电动汽车双模式充电系统及方法 |
| JP6919612B2 (ja) * | 2018-03-27 | 2021-08-18 | オムロン株式会社 | 非接触給電装置 |
| EP3776790A1 (en) | 2018-04-06 | 2021-02-17 | ABB Schweiz AG | A power transfer system for electric vehicles and a control method thereof |
| WO2019192736A1 (en) * | 2018-04-06 | 2019-10-10 | Abb Schweiz Ag | A power transfer system for electric vehicles and a control method thereof |
| US11975620B2 (en) | 2018-04-23 | 2024-05-07 | ABB E-mobility B.V. | Power transfer system for electric vehicles and a control method thereof |
| CN110509790B (zh) * | 2018-05-21 | 2020-10-02 | 郑州宇通客车股份有限公司 | 无线充电系统、车载充电装置和新能源汽车 |
| KR102569722B1 (ko) * | 2018-07-09 | 2023-08-23 | 삼성전자주식회사 | 전자장치 |
| CN109094400A (zh) * | 2018-08-17 | 2018-12-28 | 广西电网有限责任公司电力科学研究院 | 一种基于车载rfid标签的动态无线充电系统 |
| CN110014906A (zh) * | 2018-08-17 | 2019-07-16 | 广西电网有限责任公司电力科学研究院 | 一种基于车载rfid阅读器的动态无线充电系统及控制方法 |
| US11316385B2 (en) * | 2018-11-27 | 2022-04-26 | International Business Machines Corporation | Wireless energy transfer |
| KR102249722B1 (ko) * | 2019-02-01 | 2021-05-11 | 한국과학기술원 | 전기차량 및 산업용 장비의 주행 중 무선충전 급전 시스템 |
| EP3919314B1 (en) * | 2019-02-01 | 2025-12-31 | Wipowerone.Inc | POWER SUPPLY AND CURRENT COLLECTION SYSTEM FOR WIRELESS ON-ROAD CHARGING OF AN ELECTRIC VEHICLE AND INDUSTRIAL MACHINE |
| KR102370592B1 (ko) * | 2019-11-21 | 2022-03-08 | 한국과학기술원 | 차량 위치 기반 무선 충전 인버터의 전력 제어 방법 및 장치 |
| US11505077B2 (en) * | 2020-05-27 | 2022-11-22 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for wireless vehicle power transfer and misalignment estimation |
| US11180048B1 (en) | 2020-07-01 | 2021-11-23 | Toyota Motor North America, Inc. | Transport-based exchange of electrical charge and services |
| US11999247B2 (en) | 2020-07-01 | 2024-06-04 | Toyota Motor North America, Inc. | Providing transport to transport energy transfer |
| CN112947457B (zh) * | 2021-02-25 | 2023-01-24 | 薛明 | 一种分拣机器人群动态无线供电路径规划方法 |
| TWI741958B (zh) * | 2021-03-05 | 2021-10-01 | 國立陽明交通大學 | 最小功率輸入的控制方法 |
| JP7517264B2 (ja) * | 2021-06-22 | 2024-07-17 | トヨタ自動車株式会社 | 給電システム、給電装置及び給電方法 |
| JP2023002026A (ja) * | 2021-06-22 | 2023-01-10 | トヨタ自動車株式会社 | 給電システム、給電方法及び給電装置 |
| US20230093609A1 (en) * | 2021-09-23 | 2023-03-23 | Swiftmile, Inc. | Multifunction light vehicle charging platform |
| CN113991152A (zh) * | 2021-10-28 | 2022-01-28 | 福达(深圳)新能源技术有限公司 | 一种燃料电池发动机功率响应控制方法 |
| US12221003B1 (en) * | 2022-12-22 | 2025-02-11 | Integrated Roadways, Llc | Wireless charging system for a road |
| CN118700890B (zh) * | 2024-06-13 | 2025-01-28 | 施勒智能科技(上海)股份有限公司 | 一种基于物联网的充电管理方法及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013035873A1 (ja) * | 2011-09-08 | 2013-03-14 | 富士通株式会社 | 送電装置、受電装置および非接触型充電方法 |
| JP2013192326A (ja) * | 2012-03-13 | 2013-09-26 | Nissan Motor Co Ltd | 非接触給電装置 |
| US20140015330A1 (en) * | 2012-07-10 | 2014-01-16 | Samsung Electronics Co., Ltd. | Method and power transmitter for controlling power transmission |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5427105B2 (ja) | 2010-05-14 | 2014-02-26 | 株式会社豊田自動織機 | 共鳴型非接触給電システム |
| JP5810632B2 (ja) | 2011-05-27 | 2015-11-11 | 日産自動車株式会社 | 非接触給電装置 |
| KR101933462B1 (ko) | 2011-10-19 | 2019-01-02 | 삼성전자주식회사 | 무선 전력의 크기를 조정하는 무선 전력 수신기 |
| JP5923724B2 (ja) | 2011-12-06 | 2016-05-25 | パナソニックIpマネジメント株式会社 | 車輌案内装置 |
| US9087638B2 (en) | 2011-12-13 | 2015-07-21 | Texas Instruments Incorporated | Wireless power system and method |
| KR101902795B1 (ko) | 2012-02-21 | 2018-11-14 | 삼성전자주식회사 | 무선 충전 장치 및 방법 |
| KR20140031780A (ko) | 2012-09-05 | 2014-03-13 | 삼성전자주식회사 | 교차 연결된 무선 전력 수신기를 배제하기 위한 무선 전력 송신기 및 그 제어 방법 |
| KR101947980B1 (ko) * | 2012-09-12 | 2019-02-14 | 삼성전자주식회사 | 무선 전력 전송 장치 및 방법, 무선 전력 수신 장치 |
-
2014
- 2014-08-29 US US14/472,856 patent/US9608465B2/en active Active
-
2015
- 2015-03-11 EP EP15712005.6A patent/EP3116743B1/en active Active
- 2015-03-11 WO PCT/US2015/019953 patent/WO2015160451A1/en not_active Ceased
- 2015-03-11 BR BR112016024222A patent/BR112016024222A2/pt not_active IP Right Cessation
- 2015-03-11 KR KR1020167028844A patent/KR20160147747A/ko not_active Withdrawn
- 2015-03-11 CN CN201580020454.8A patent/CN106232417B/zh active Active
- 2015-03-11 JP JP2016562542A patent/JP2017521985A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013035873A1 (ja) * | 2011-09-08 | 2013-03-14 | 富士通株式会社 | 送電装置、受電装置および非接触型充電方法 |
| JP2013192326A (ja) * | 2012-03-13 | 2013-09-26 | Nissan Motor Co Ltd | 非接触給電装置 |
| US20140015330A1 (en) * | 2012-07-10 | 2014-01-16 | Samsung Electronics Co., Ltd. | Method and power transmitter for controlling power transmission |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7211820B2 (ja) | 2013-12-31 | 2023-01-24 | エレクトリック ロード リミテッド | 無線電力伝送を介して道路上の電気自動車に電力を供給するためのシステムおよび方法 |
| JP2019526219A (ja) * | 2013-12-31 | 2019-09-12 | エレクトリック ロード リミテッド | 無線電力伝送を介して道路上の電気自動車に電力を供給するためのシステムおよび方法 |
| US12275311B2 (en) | 2013-12-31 | 2025-04-15 | Electreon Wireless Ltd. | System and method for powering on-road electric vehicles via wireless power transfer |
| JPWO2017208498A1 (ja) * | 2016-05-30 | 2019-04-04 | パナソニックIpマネジメント株式会社 | 非接触給電システム及び非接触電力伝送システム |
| JP2019057990A (ja) * | 2017-09-20 | 2019-04-11 | トヨタ自動車株式会社 | 非接触給電システム及び受電側装置 |
| JP2020195176A (ja) * | 2019-05-27 | 2020-12-03 | 株式会社デンソー | 走行中給電システム |
| JP7243450B2 (ja) | 2019-05-27 | 2023-03-22 | 株式会社デンソー | 走行中給電システム |
| JP7356900B2 (ja) | 2019-12-27 | 2023-10-05 | オムロン株式会社 | 共振発振回路及び非接触給電システム |
| JP2021108515A (ja) * | 2019-12-27 | 2021-07-29 | オムロン株式会社 | 共振発振回路及び非接触給電システム |
| JP2023001045A (ja) * | 2021-06-17 | 2023-01-04 | トヨタ自動車株式会社 | 車両及び非接触給電システム |
| CN115489332A (zh) * | 2021-06-17 | 2022-12-20 | 丰田自动车株式会社 | 车辆及非接触供电系统 |
| CN115489332B (zh) * | 2021-06-17 | 2025-08-15 | 丰田自动车株式会社 | 车辆及非接触供电系统 |
| JP7732395B2 (ja) | 2021-06-17 | 2025-09-02 | トヨタ自動車株式会社 | 車両及び非接触給電システム |
| US12434585B2 (en) | 2021-06-17 | 2025-10-07 | Toyota Jidosha Kabushiki Kaisha | Vehicle and noncontact power supplying system with vehicle signal emission control |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015160451A1 (en) | 2015-10-22 |
| EP3116743B1 (en) | 2018-06-27 |
| CN106232417A (zh) | 2016-12-14 |
| EP3116743A1 (en) | 2017-01-18 |
| BR112016024222A2 (pt) | 2017-08-15 |
| US9608465B2 (en) | 2017-03-28 |
| CN106232417B (zh) | 2019-07-26 |
| KR20160147747A (ko) | 2016-12-23 |
| US20150303714A1 (en) | 2015-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3116743B1 (en) | Devices, systems, and method for power control of dynamic electric vehicle charging systems | |
| US20160023557A1 (en) | Devices, systems, and method for dynamic electric vehicle charging with position detection | |
| EP3311464B1 (en) | Devices, systems, and methods using reactive power injection for active tuning electric vehicle charging systems | |
| JP6501777B2 (ja) | 電気車両および充電スタンドの検出および識別に関する方法および装置 | |
| CN107074124B (zh) | 用于无线电力传输应用中的活体物体保护的系统、方法和装置 | |
| EP3025405B1 (en) | Device alignment in inductive power transfer systems | |
| EP3216105B1 (en) | Systems, methods, and apparatus for controlling the amount of charge provided to a charge-receiving element in a series-tuned resonant system | |
| US9537323B2 (en) | Contactless power supplying system with power limiting control | |
| US9446675B2 (en) | Non-contact power supply apparatus, non-contact power supply system, and non-contact power supply method | |
| WO2012165242A1 (ja) | 非接触給電装置 | |
| WO2015112381A1 (en) | Systems and methods for electric vehicle induction coil alignment | |
| WO2017019231A1 (en) | Systems, methods, and apparatus implementing hybrid symmetric and asymmetric control for soft switching in wireless power transfer applications | |
| JP2014110681A (ja) | 非接触給電装置、非接触給電システム及び非接触給電方法 | |
| WO2013118368A1 (ja) | 充電スタンド及び相対位置制御方法 | |
| US20240308373A1 (en) | Control device | |
| US20240253511A1 (en) | Control device for power supply during traveling | |
| JP7140041B2 (ja) | 非接触給電システム | |
| JP2017085784A (ja) | 給電システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161019 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181119 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190418 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20190717 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190930 |