JP2017516554A - 医療用システム - Google Patents
医療用システム Download PDFInfo
- Publication number
- JP2017516554A JP2017516554A JP2016569628A JP2016569628A JP2017516554A JP 2017516554 A JP2017516554 A JP 2017516554A JP 2016569628 A JP2016569628 A JP 2016569628A JP 2016569628 A JP2016569628 A JP 2016569628A JP 2017516554 A JP2017516554 A JP 2017516554A
- Authority
- JP
- Japan
- Prior art keywords
- medical system
- bone
- patient
- medical
- reference unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/14—Surgical saws
- A61B17/15—Guides therefor
- A61B17/154—Guides therefor for preparing bone for knee prosthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/14—Surgical saws
- A61B17/15—Guides therefor
- A61B17/154—Guides therefor for preparing bone for knee prosthesis
- A61B17/155—Cutting femur
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/14—Surgical saws
- A61B17/15—Guides therefor
- A61B17/154—Guides therefor for preparing bone for knee prosthesis
- A61B17/157—Cutting tibia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B2017/568—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor produced with shape and dimensions specific for an individual patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/108—Computer aided selection or customisation of medical implants or cutting guides
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y80/00—Products made by additive manufacturing
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Physical Education & Sports Medicine (AREA)
- Transplantation (AREA)
- Dentistry (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Surgical Instruments (AREA)
- Prostheses (AREA)
Abstract
Description
12 ナビゲーションシステム
14 受信ユニット
16 立体カメラ
18 検出器
20 データ処理機器
22 コンピュータ
24 モニタ
26 入力装置
28 入力装置
30 キーボード
32 マウス
34,34’ 参照ユニット
36 大腿骨
38,38’ 基体
40,40’ 担体要素
42,42’ マーカ要素
44,44’ 担体プレート
46,46’ 半球体
48,48’ 表面
50 エミッタ
52,52’ 上側
54,54’ 底部側
56,56’ 骨接触面
58,58’ 輪郭
60,60’ 骨表面
61,61’ 部分
62a,62b,62c,62a’,62b’,62c’ 固締要素受け
64 固締要素
66a,66b,66c,66a’,66b’,66c’ 開口
68a,68b,68c,68a’,68b’,68c’ 孔
70,70’ 上側
72,72’ スリーブ
74 骨ピン
76 先端
78 雄ねじ区域
80 シャフト区域
82 多角形区域
84 長手方向軸
86,86’ 第1連結要素
88,88’ 第2連結要素
90,90’ 医療器具
92,92’ 連結装置
94,94’ 連結受け
96,96’ 連結突起
98,98’ 溝
100,100’ 長手方向軸
102,102’ リブ
104,104’ 長手方向軸
106,106’ 鋸テンプレート
108,108’ 鋸スロット
110 鋸スロット
112,112’ 切断面
114 切断面
116,116’ 接触体
118,118’ 前側
120,120’ 第1スロット体
122,122’ 後ろ側
124,124’ 接触体骨接触面
126,126’ 接触体骨接触面
128,128’ 輪郭
130,130’ 輪郭
132,132’ 部分
134,134’ 部分
136 接触面
138 端面
140 第2スロット体
142,142’ 連結体
144,144’ 底部側
146 開口
148a,148b,148c,148d,148a’,148b’,148c’,148d’ 器具固締要素受け
150a,150b,150c,150d,150a’,150b’,150c’,150d 開口
152a,152b,152c,152d,152a’,152b’,152c’,152’ 孔
154a,154b,154c,154d,154a’,154b’ 154c’,154d’ スリーブ
156 脛骨
158 スリーブ
Claims (27)
- 特に膝関節内プロテーゼを埋込むための医療用システム(10)であって、
その空間位置が、外科用ナビゲーションシステム(12)を使用して検出可能な少なくとも1つの医療用参照ユニット(34;34’)を含み、
少なくとも1つの医療用参照ユニット(34;34’)が、担体要素(40;40’)上に配置又は形成されるとともに前記外科用ナビゲーションシステム(12)の検出装置(16)を使用して検出可能である少なくとも1つの外科用マーカ要素(42;42’)を含み、
少なくとも1つの医療用参照ユニット(34;34’)が、前記担体要素(40;40’)を担持する基体(38;38’)を含む、医療用システムにおいて、
前記基体(38;38’)が、前記基体(38;38’)から離れる方を向くとともに、球体の表面の扇形であること及び平面状表面であることから外れる少なくとも1つの患者特有の骨接触面(56;56’)を含み、
前記少なくとも1つの骨接触面(56;56’)が、前記患者の骨表面(60;60’)に対応するやり方で形成されること、を特徴とする医療用システム。 - 請求項1に記載の医療用システムであって、前記基体(38;38’)と前記担体要素(40;40’)とが、一体構成である又は共に解放不可能に接続されること、を特徴とする医療用システム。
- 請求項1に記載の医療用システムであって、前記基体(38;38’)と前記担体要素(40;40’)とが、互いに解放可能に接続するように構成されること、を特徴とする医療用システム。
- 請求項1又は3に記載の医療用システムであって、前記基体(38;38’)と前記担体要素(40;40’)とを、連結位置において力ロック式及び/又は形状ロック式に連結するための連結装置を特徴とする医療用システム。
- 請求項4に記載の医療用システムであって、前記連結装置が、一方で前記基体(38;38’)上、他方で前記担体要素(40;40’)上に配置又は形成されるとともに、前記連結位置のときに係合状態にあり、非連結位置のときに係合状態にない第1及び第2連結要素を含むこと、を特徴とする医療用システム。
- 請求項5に記載の医療用システムであって、前記第1及び第2連結要素が、少なくとも1つの連結受けと、連結受けと協働する対応する連結突起とを含むこと、を特徴とする医療用システム。
- 請求項1〜6のいずれか1項に記載の医療用システムであって、前記少なくとも1つの参照ユニット(34;34’)が、前記参照ユニット(34;34’)を骨(36;156)に固定するための固締要素(64)用に少なくとも1つの固締要素受け(62a、62b、62c;62a’、62b’、62c’)を含むこと、を特徴とする医療用システム。
- 請求項7に記載の医療用システムであって、前記少なくとも1つの固締要素受け(62a、62b、62c;62a’、62b’、62c’)が、前記基体(38;38’)上及び/又は前記担体要素(40;40’)上に配置又は形成されること、を特徴とする医療用システム。
- 請求項7又は8に記載の医療用システムであって、前記少なくとも1つの固締要素受け(62a、62b、62c;62a’、62b’、62c’)が、開口(66a、66b、66c)の形態に、特に孔(68a、68b、68c)の前記形態に構成されること、を特徴とする医療用システム。
- 請求項1〜9のいずれか1項に記載の医療用システムであって、前記少なくとも1つの参照ユニット(34;34’)に解放可能に接続可能である、少なくとも1つの医療器具(90;90’)を特徴とする医療用システム。
- 請求項1〜10のいずれか1項に記載の医療用システムであって、前記少なくとも1つの医療器具(90;90’)と前記少なくとも1つの参照ユニット(34;34’)とを連結位置において、力ロック式及び/又は形状ロック式に連結するための連結装置(92;92’)を特徴とする医療用システム。
- 請求項11に記載の医療用システムであって、前記連結装置(92;92’)が、一方で前記少なくとも1つの参照ユニット(34;34’)上、特に前記基体(38;38’)上、他方で前記少なくとも1つの医療器具(90;90’)上に配置又は形成されるとともに、前記連結位置のときに係合状態にあり、非連結位置のときに係合状態にない第1及び第2連結要素(86、88;86’、88’)を含むこと、を特徴とする医療用システム。
- 請求項12に記載の医療用システムであって、前記第1及び第2連結要素(86、88;86’、88’)が、少なくとも1つの連結受け(94;94’)と、少なくとも1つの連結受け(94;94’)と協働する少なくとも1つの対応する連結受け(96;96’)とを含むこと、を特徴とする医療用システム。
- 請求項10〜13のいずれか1項に記載の医療用システムであって、前記少なくとも1つの医療器具(90;90’)が、前記少なくとも1つの医療器具(90;90’)を骨(36;156)に固定するための固締要素(64)用に少なくとも1つの器具固締要素受け(148a、148b、148c、148d、148e;148a’、148b’、148c’、148d’、148e’)を含むこと、を特徴とする医療用システム。
- 請求項14に記載の医療用システムであって、前記少なくとも1つの器具固締要素受け(148a、148b、148c、148d、148e;148a’、148b’、148c’、148d’、148e’)が、開口(150a、150b、150c、150d、150e;150a’、150b’、150c’、150d’、150e’)の前記形態に、特に孔(152a、152b、152c、152d、152e;152a’、152b’、152c’、152d’、152e’)の前記形態に構成されること、を特徴とする医療用システム。
- 請求項10〜15のいずれか1項に記載の医療用システムであって、
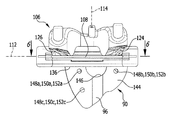
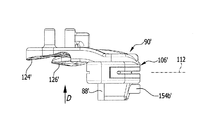
前記少なくとも1つの医療器具(90;90’)が、接触体(116;116’)を含み、
接触体(116;116’)が、前記接触体から離れる方を向くとともに、球体の表面の扇形であること及び平面状表面であることから外れる少なくとも1つの患者特有の接触体骨接触面(124、126;124’、126’)を含み、
前記少なくとも1つの患者特有の接触体骨接触面(124、126;124’、126’)が、前記患者の骨表面に対応するやり方で形成されること、を特徴とする医療用システム。 - 請求項14〜16のいずれか1項に記載の医療用システムであって、前記少なくとも1つの固締要素受け(62a、62b;62a’、62b’)及び前記少なくとも1つの器具固締要素受け(148a、148b;148a’、148b’)が、各々長手方向軸を規定し、前記長手方向軸が前記連結位置において一致すること、を特徴とする医療用システム。
- 請求項10〜17のいずれか1項に記載の医療用システムであって、前記少なくとも1つの医療器具(90;90’)が、大腿骨(36)及び/又は脛骨(156)用の鋸テンプレート(106;106’)を含むこと、を特徴とする医療用システム。
- 請求項18に記載の医療用システムであって、前記鋸テンプレート(106;106’)が、骨鋸の鋸刃用の少なくとも1つの鋸スロット(108、110;108’)を含むこと、を特徴とする医療用システム。
- 請求項16〜19のいずれか1項に記載の医療用システムであって、前記患者特有の骨接触面(56;56’)及び/又は前記患者特有の接触体骨接触面(124、126;124’、126’)が、大腿骨(26)又は脛骨(156)の骨表面(60;60’)の少なくとも一部(61;61’)に対応する輪郭(58、128、130;58’、128’、130’)を有すること、を特徴とする医療用システム。
- 請求項1〜20のいずれか1項に記載の医療用システムであって、前記患者特有の骨接触面(56;56’)、及び/又は前記患者特有の接触体骨接触面(124、126;124’、126’)、及び/又は前記基体(38;38’)、及び/又は前記接触体(116;116’)が、鋳造、塑造、切屑生産加工方法、又は3D印刷により製造されること、を特徴とする医療用システム。
- 請求項1〜21のいずれか1項に記載の医療用システムであって、前記患者特有の骨接触面(56;56’)が、非侵襲的に測定された前記患者の骨輪郭データ、特にX線、磁気共鳴、及び/又は超音波画像からの前記患者の骨輪郭データに対応する又は実質対応する骨接触面輪郭データを規定すること、を特徴とする医療用システム。
- 請求項16〜22のいずれか1項に記載の医療用システムであって、前記患者特有の接触体骨接触面(124、126;124’、126’)が、非侵襲的に測定された前記患者の骨輪郭データ、特にX線、磁気共鳴、及び/又は超音波画像からの前記患者の骨輪郭データに対応する又は実質対応する接触体骨接触面輪郭データを規定すること、を特徴とする医療用システム。
- 請求項1〜23のいずれか1項に記載の医療用システムであって、前記参照ユニット(34;34’)を、骨に固定するための少なくとも1つの固締要素(64)を特徴とする医療用システム。
- 請求項24に記載の医療用システムであって、前記少なくとも1つの固締要素(64)が、骨ねじの前記形態に又は骨ピン(74)の前記形態に又は骨釘の前記形態に構成されること、を特徴とする医療用システム。
- 請求項1〜25のいずれか1項に記載の医療用システムであって、前記少なくとも1つの参照ユニット(34;34’)が、少なくとも3つのマーカ要素(42;42’)を含むこと、を特徴とする医療用システム。
- 請求項1〜26のいずれか1項に記載の医療用システムであって、前記少なくとも1つの参照ユニット(34;34’)の前記位置を検出するための少なくとも1つの検出装置(16)を含む、外科用ナビゲーションシステム(12)を特徴とする医療用システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014107481.5 | 2014-05-27 | ||
| DE102014107481.5A DE102014107481A1 (de) | 2014-05-27 | 2014-05-27 | Medizinisches System |
| PCT/EP2015/061621 WO2015181188A1 (de) | 2014-05-27 | 2015-05-27 | Medizinisches system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017516554A true JP2017516554A (ja) | 2017-06-22 |
| JP2017516554A5 JP2017516554A5 (ja) | 2018-07-05 |
| JP6591452B2 JP6591452B2 (ja) | 2019-10-16 |
Family
ID=53433162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016569628A Active JP6591452B2 (ja) | 2014-05-27 | 2015-05-27 | 医療用システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10675096B2 (ja) |
| EP (1) | EP3151774B1 (ja) |
| JP (1) | JP6591452B2 (ja) |
| CN (1) | CN106413591B (ja) |
| DE (1) | DE102014107481A1 (ja) |
| WO (1) | WO2015181188A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022539666A (ja) * | 2019-06-06 | 2022-09-13 | サントザリスメンディ グルーポ デ インベスティガシオン エセ.エレ | 人工膝関節全置換術で使用される器具による位置合わせシステム |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2558011A4 (en) * | 2010-04-14 | 2017-11-15 | Smith & Nephew, Inc. | Systems and methods for patient- based computer assisted surgical procedures |
| WO2018213835A1 (en) * | 2017-05-19 | 2018-11-22 | Smith & Nephew, Inc. | Cut guide system |
| AU2019269713A1 (en) * | 2018-05-18 | 2020-11-26 | Smith & Nephew Asia Pacific Pte Limited | System and method for tracking resection planes |
| US10856891B2 (en) * | 2018-05-29 | 2020-12-08 | DePuy Synthes Products, Inc. | Customized patient-specific orthopaedic surgical instruments |
| CN109009473B (zh) * | 2018-07-14 | 2021-04-06 | 杭州三坛医疗科技有限公司 | 脊椎创伤定位系统及其定位方法 |
| CN109953828B (zh) * | 2019-05-07 | 2020-06-23 | 北京和华瑞博医疗科技有限公司 | 一种参考架坐标系找回方法以及参考架坐标系找回装置 |
| US20210145458A1 (en) * | 2019-11-19 | 2021-05-20 | Thomas Paszicsnyek | Three-dimensional orientation system and method for orthopedic surgery |
| CN111388087B (zh) * | 2020-04-26 | 2026-01-02 | 深圳市鑫君特智能医疗器械有限公司 | 手术导航系统及执行手术导航方法的计算机与存储介质 |
| CN111388088B (zh) * | 2020-04-26 | 2024-03-29 | 深圳市鑫君特智能医疗器械有限公司 | 手术导板、三维模型及制造构建方法、计算机与存储介质 |
| US11864959B2 (en) * | 2020-07-20 | 2024-01-09 | Orthosoft Ulc | Surgical guides |
| ES2895389A1 (es) * | 2020-08-21 | 2022-02-21 | Pedreno Conrado Miguel Bano | Método implementado por ordenador de planificación y navegación quirúrgica para la cirugías de osteosíntesis, osteotomías correctoras y cirugía tumoral con guías de corte a medida navegables, instrumental poliaxial navegado, cuñas y placas de osteosíntesis a medida |
| WO2022150284A1 (en) | 2021-01-06 | 2022-07-14 | Mako Surgical Corp. | Tracker for a navigation system |
| US20220296390A1 (en) * | 2021-03-16 | 2022-09-22 | Medfit International Ag | System and method for dynamic hip and shoulder joint balancing using functional stability measurements |
| US20220370081A1 (en) * | 2021-05-20 | 2022-11-24 | Wright Medical Technology, Inc. | Surgical guides and methods of manufacture and use |
| US12467489B2 (en) | 2022-03-17 | 2025-11-11 | Mako Surgical Corp. | Techniques for securing together components of one or more surgical carts |
| US12465376B2 (en) * | 2022-03-21 | 2025-11-11 | Microport Orthopedics Holdings Inc. | Medial biased patient-specific instrumentation and related methods |
| CN114948076A (zh) * | 2022-05-24 | 2022-08-30 | 苏州铸正机器人有限公司 | 一种胫骨隧道重建导向器、定位方法、系统及关节镜 |
| AU2024310381A1 (en) * | 2023-06-26 | 2026-02-12 | Stryker European Operations Limited | Sawblade position identification process for mixed reality surgical navigation |
| USD1117755S1 (en) | 2023-08-18 | 2026-03-10 | Mako Surgical Corp. | Surgical tracker |
| WO2025195657A1 (en) * | 2024-03-21 | 2025-09-25 | Smith & Nephew, Inc. | Systems, devices and methods for navigated bone resection |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001507614A (ja) * | 1997-10-28 | 2001-06-12 | カール−ツアイス−スチフツング | 骨セグメントナビゲーションシステム |
| US20060195111A1 (en) * | 2005-01-25 | 2006-08-31 | Orthosoft Inc. | Universal positioning block assembly |
| JP2009530004A (ja) * | 2006-03-23 | 2009-08-27 | インペリアル イノベーションズ リミテッド | 前十字靱帯の再建 |
| JP2010110635A (ja) * | 2002-08-23 | 2010-05-20 | Orthosoft Inc | 手術用自在位置決めブロックおよびツ−ルガイド |
| WO2012169642A1 (ja) * | 2011-06-06 | 2012-12-13 | 株式会社大野興業 | レジストレーション用テンプレートの製造方法 |
| JP2013523415A (ja) * | 2010-04-14 | 2013-06-17 | スミス アンド ネフュー インコーポレーテッド | 患者立脚型コンピュータ支援外科的処置のためのシステムおよび方法 |
| US20140039520A1 (en) * | 2006-06-16 | 2014-02-06 | Hani Haider | Method and apparatus for computer aided surgery |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4219939C2 (de) | 1992-06-18 | 1995-10-19 | Klaus Dipl Ing Radermacher | Vorrichtung zur Ausrichtung, Positionierung und Führung von Bearbeitungswerkzeugen, Bearbeitungs- oder Meßvorrichtungen zur Bearbeitung einer knöchernen Struktur und Verfahren zur Erstellung dieser Vorrichtung |
| US6327491B1 (en) * | 1998-07-06 | 2001-12-04 | Neutar, Llc | Customized surgical fixture |
| US20050113846A1 (en) * | 2001-02-27 | 2005-05-26 | Carson Christopher P. | Surgical navigation systems and processes for unicompartmental knee arthroplasty |
| FR2884407B1 (fr) * | 2005-04-13 | 2007-05-25 | Tornier Sas | Dispositif chirurgical d'implantation d'une prothese partielle ou totale du genou |
| US20070066917A1 (en) * | 2005-09-20 | 2007-03-22 | Hodorek Robert A | Method for simulating prosthetic implant selection and placement |
| US20070078678A1 (en) * | 2005-09-30 | 2007-04-05 | Disilvestro Mark R | System and method for performing a computer assisted orthopaedic surgical procedure |
| EP1958575B1 (en) | 2007-02-13 | 2014-08-13 | Brainlab AG | Device or system for positioning or preparing the positioning of a medical operating instrument, especially an incision block or a cutting block or a ligament balancing device |
| US20080319491A1 (en) * | 2007-06-19 | 2008-12-25 | Ryan Schoenefeld | Patient-matched surgical component and methods of use |
| DE102010060914A1 (de) | 2010-11-30 | 2012-05-31 | Aesculap Ag | Chirurgisches Markerelement, chirurgische Referenzierungseinheit und chirurgisches Navigationssystem |
| US8668700B2 (en) * | 2011-04-29 | 2014-03-11 | Biomet Manufacturing, Llc | Patient-specific convertible guides |
| EP2863820B1 (en) * | 2012-06-20 | 2020-10-28 | Intellijoint Surgical Inc. | Method of manufacturing a system for guided surgery |
| CN104461718B (zh) | 2013-09-23 | 2017-12-12 | 腾讯科技(深圳)有限公司 | 游戏应用的画面播放方法和客户端 |
| US9463030B2 (en) * | 2013-09-25 | 2016-10-11 | Biomet Manufacturing, Llc | Positioning multiple implants with respect to single coordinate system |
| US11006969B2 (en) * | 2017-06-04 | 2021-05-18 | Felasfa Wodajo | Patient-specific cutting guide |
-
2014
- 2014-05-27 DE DE102014107481.5A patent/DE102014107481A1/de not_active Withdrawn
-
2015
- 2015-05-27 WO PCT/EP2015/061621 patent/WO2015181188A1/de not_active Ceased
- 2015-05-27 CN CN201580028237.3A patent/CN106413591B/zh active Active
- 2015-05-27 JP JP2016569628A patent/JP6591452B2/ja active Active
- 2015-05-27 EP EP15729763.1A patent/EP3151774B1/de active Active
-
2016
- 2016-11-22 US US15/358,799 patent/US10675096B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001507614A (ja) * | 1997-10-28 | 2001-06-12 | カール−ツアイス−スチフツング | 骨セグメントナビゲーションシステム |
| JP2010110635A (ja) * | 2002-08-23 | 2010-05-20 | Orthosoft Inc | 手術用自在位置決めブロックおよびツ−ルガイド |
| US20060195111A1 (en) * | 2005-01-25 | 2006-08-31 | Orthosoft Inc. | Universal positioning block assembly |
| JP2009530004A (ja) * | 2006-03-23 | 2009-08-27 | インペリアル イノベーションズ リミテッド | 前十字靱帯の再建 |
| US20140039520A1 (en) * | 2006-06-16 | 2014-02-06 | Hani Haider | Method and apparatus for computer aided surgery |
| JP2013523415A (ja) * | 2010-04-14 | 2013-06-17 | スミス アンド ネフュー インコーポレーテッド | 患者立脚型コンピュータ支援外科的処置のためのシステムおよび方法 |
| WO2012169642A1 (ja) * | 2011-06-06 | 2012-12-13 | 株式会社大野興業 | レジストレーション用テンプレートの製造方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022539666A (ja) * | 2019-06-06 | 2022-09-13 | サントザリスメンディ グルーポ デ インベスティガシオン エセ.エレ | 人工膝関節全置換術で使用される器具による位置合わせシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3151774B1 (de) | 2018-07-11 |
| WO2015181188A1 (de) | 2015-12-03 |
| US10675096B2 (en) | 2020-06-09 |
| CN106413591B (zh) | 2019-06-04 |
| DE102014107481A1 (de) | 2015-12-03 |
| EP3151774A1 (de) | 2017-04-12 |
| JP6591452B2 (ja) | 2019-10-16 |
| US20170071677A1 (en) | 2017-03-16 |
| CN106413591A (zh) | 2017-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6591452B2 (ja) | 医療用システム | |
| US12433694B2 (en) | Hip replacement navigation system and method | |
| JP6643410B2 (ja) | 臼蓋コンポーネントの位置決めを決定するための方法および装置 | |
| US11298189B2 (en) | Prosthesis guide comprising patient-matched features | |
| US20140257304A1 (en) | Patient-Specific Glenoid Guide With a Reusable Guide Holder | |
| CN103347458B (zh) | 用于监视骨片的旋转定向的设备 | |
| JP2005013737A (ja) | コンピュータ支援ナビゲーションシステムと共に使用可能な装置及び器具をコンピュータ支援ナビゲーションシステムと共に使用可能にするために使用可能な装置並びにコンピュータ支援システムに登録するための第1の予め定められたジオメトリーを有した器具を作成する方法 | |
| JP2014131724A (ja) | 手術中の蛍光透視検査のために備えられた形状を有する整列ガイド | |
| JP2017516554A5 (ja) | ||
| JP2019518512A (ja) | 患者に特化したプロテーゼの整列 | |
| US9463030B2 (en) | Positioning multiple implants with respect to single coordinate system | |
| WO2018095499A1 (en) | A patient specific template and method for partial knee replacement | |
| CA2496351A1 (en) | Navigated surgical sizing guide | |
| US20170105740A1 (en) | 4-in-1 femoral finishing cutting jig | |
| US11185424B2 (en) | Alignment guide for acetabular implant surgery and methods for use | |
| KR101362252B1 (ko) | 환자-맞춤형 정합 가이드 시스템 및 그 방법 | |
| KR101502529B1 (ko) | 대퇴스템 전염각 측정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170207 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20170207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190918 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6591452 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |