JP2017505202A - 外科用器具可視性のロボット制御 - Google Patents
外科用器具可視性のロボット制御 Download PDFInfo
- Publication number
- JP2017505202A JP2017505202A JP2016550719A JP2016550719A JP2017505202A JP 2017505202 A JP2017505202 A JP 2017505202A JP 2016550719 A JP2016550719 A JP 2016550719A JP 2016550719 A JP2016550719 A JP 2016550719A JP 2017505202 A JP2017505202 A JP 2017505202A
- Authority
- JP
- Japan
- Prior art keywords
- endoscopic image
- endoscope
- robot
- center
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00133—Drive units for endoscopic tools inserted through or with the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
- A61B1/3132—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes for laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Signal Processing (AREA)
- Robotics (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Abstract
Description
Claims (20)
- 解剖学的領域の内視鏡画像を生成するために動作可能な内視鏡、及び
ロボットアクチュエータコマンドに応答して前記解剖学的領域内において前記内視鏡を動かすように前記内視鏡に可動的に接続されるロボット
を含むロボットユニットと、
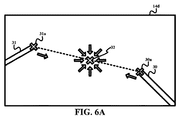
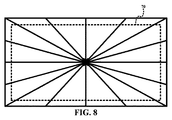
前記解剖学的領域の前記内視鏡画像の表示を制御するように前記内視鏡に可動的に接続され、前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように内視鏡ポーズコマンドを生成するように動作可能な内視鏡画像コントローラ、及び
前記内視鏡ポーズコマンドに応答して前記ロボットアクチュエータコマンドを生成するように前記内視鏡画像コントローラ及び前記ロボットに可動的に接続されるロボットコントローラ
を含む制御ユニットと
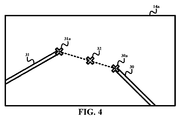
を有する、ロボットガイドシステム。 - 前記内視鏡画像コントローラは前記少なくとも二つの介入器具の間の空間点を前記内視鏡画像の前記中央にアラインする、請求項1に記載のロボットガイドシステム。
- 前記空間点は、前記少なくとも二つの介入器具を接続する少なくとも一つの仮想ラインに沿う、請求項2に記載のロボットガイドシステム。
- 前記空間点は前記少なくとも一つの仮想ラインの中間点に沿う、請求項3に記載のロボットガイドシステム。
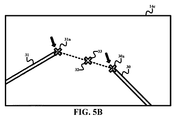
- 前記空間点は前記少なくとも一つの仮想ラインの中間点からオフセットを有する、請求項3に記載のロボットガイドシステム。
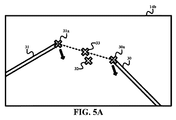
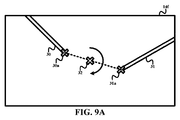
- 前記内視鏡画像コントローラは、前記内視鏡画像の前記中央に対する、前記少なくとも二つの介入器具の間の前記空間点のアライメントを維持するように、前記内視鏡をピボットする前記内視鏡ポーズコマンドを生成する、請求項2に記載のロボットガイドシステム。
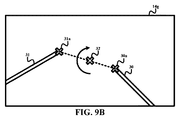
- 前記内視鏡画像コントローラは、前記解剖学的領域内において互いの方へ動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように、前記内視鏡を縦方向に動かす前記内視鏡ポーズコマンドを生成する、請求項2に記載のロボットガイドシステム。
- 前記内視鏡画像コントローラは、前記解剖学的領域内において他方から離れるように動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の前記可視性を維持するように、前記内視鏡を縦方向に動かす前記内視鏡ポーズコマンドを生成する、請求項2に記載のロボットガイドシステム。
- 前記内視鏡画像コントローラは、前記解剖学的領域内において互いに対して回転される前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の前記可視性を維持するように、前記内視鏡を回転させる前記内視鏡ポーズコマンドを生成する、請求項2に記載のロボットガイドシステム。
- 前記内視鏡は較正されない、請求項1に記載のロボットガイドシステム。
- 解剖学的領域の内視鏡画像を生成する内視鏡に接続されるロボットのための制御ユニットであって、前記制御ユニットは、
前記解剖学的領域の前記内視鏡画像の表示を制御するように動作可能であり、前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように内視鏡ポーズコマンドを生成するように動作可能である内視鏡画像コントローラ、及び
前記内視鏡ポーズコマンドに応答してロボットアクチュエータコマンドを生成するように前記内視鏡画像コントローラに可動的に接続されるロボットコントローラ
を有する、制御ユニット。 - 前記内視鏡画像コントローラは前記少なくとも二つの介入器具の間の空間点を前記内視鏡画像の前記中央にアラインする、請求項11に記載の制御ユニット。
- 前記内視鏡画像コントローラは、前記内視鏡画像の前記中央に対する、前記少なくとも二つの介入器具の間の前記空間点のアライメントを維持するように、前記内視鏡をピボットする前記内視鏡ポーズコマンドを生成する、請求項12に記載の制御ユニット。
- 前記内視鏡画像コントローラは、前記解剖学的領域内において互いの方へ動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように、前記内視鏡を縦方向に動かす前記内視鏡ポーズコマンドを生成し、
前記内視鏡画像コントローラは、前記解剖学的領域内において互いから離れるように動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように、前記内視鏡を縦方向に動かす前記内視鏡ポーズコマンドを生成する、請求項12に記載の制御ユニット。 - 前記内視鏡画像コントローラは、前記解剖学的領域内において互いに対して回転される前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の前記可視性を維持するように、前記内視鏡を回転させる前記内視鏡ポーズコマンドを生成する、請求項12に記載の制御ユニット。
- 解剖学的領域の内視鏡画像を生成し、表示するように内視鏡を動作させるステップと、
前記内視鏡が前記解剖学的領域の前記内視鏡画像を生成しているとき、前記解剖学的領域内において前記内視鏡を動かすようにロボットに命令するステップと
を有する、ロボットガイド方法において、
前記ロボットに命令するステップは、前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持する、
ロボットガイド方法。 - 前記少なくとも二つの介入器具の間の空間点は前記内視鏡画像の前記中央にアラインされる、請求項16に記載のロボットガイド方法。
- 前記ロボットは、前記内視鏡画像の前記中央に対する、前記少なくとも二つの介入器具の間の前記空間点のアライメントを維持するように、前記内視鏡をピボットするように命令される、請求項17に記載のロボットガイド方法。
- 前記ロボットは、前記解剖学的領域内において互いの方へ動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように、前記内視鏡を縦方向に動かすように命令され、
前記ロボットは、前記解剖学的領域内において他方から離れるように動かされる前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の可視性を維持するように、前記内視鏡を縦方向に動かすように命令される、
請求項17に記載のロボットガイド方法。 - 前記ロボットは、前記解剖学的領域内において互いに対して回転される前記少なくとも二つの介入器具に応答して前記内視鏡画像の中央に対して前記内視鏡画像の前記表示内において少なくとも二つの介入器具の前記可視性を維持するように、前記内視鏡を回転させるように命令される、請求項17に記載のロボットガイド方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019221910A JP6982605B2 (ja) | 2014-02-12 | 2019-12-09 | 外科用器具可視性のロボット制御 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461938721P | 2014-02-12 | 2014-02-12 | |
| US61/938,721 | 2014-02-12 | ||
| PCT/IB2015/050665 WO2015121765A1 (en) | 2014-02-12 | 2015-01-29 | Robotic control of surgical instrument visibility |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019221910A Division JP6982605B2 (ja) | 2014-02-12 | 2019-12-09 | 外科用器具可視性のロボット制御 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017505202A true JP2017505202A (ja) | 2017-02-16 |
| JP2017505202A5 JP2017505202A5 (ja) | 2018-03-01 |
Family
ID=52629630
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016550719A Pending JP2017505202A (ja) | 2014-02-12 | 2015-01-29 | 外科用器具可視性のロボット制御 |
| JP2019221910A Active JP6982605B2 (ja) | 2014-02-12 | 2019-12-09 | 外科用器具可視性のロボット制御 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019221910A Active JP6982605B2 (ja) | 2014-02-12 | 2019-12-09 | 外科用器具可視性のロボット制御 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10945796B2 (ja) |
| EP (1) | EP3104804B1 (ja) |
| JP (2) | JP2017505202A (ja) |
| CN (1) | CN105992568B (ja) |
| WO (1) | WO2015121765A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018143560A (ja) * | 2017-01-03 | 2018-09-20 | 上銀科技股▲フン▼有限公司 | 内視鏡を操縦するシステム及び方法 |
| WO2023022257A1 (ko) * | 2021-08-19 | 2023-02-23 | 한국로봇융합연구원 | 복강경 카메라 홀더 로봇 제어시스템 및 제어방법 |
| WO2023145285A1 (ja) * | 2022-01-26 | 2023-08-03 | オリンパス株式会社 | 内視鏡システム、内視鏡システムの制御方法および記録媒体 |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6881979B2 (ja) * | 2014-02-04 | 2021-06-02 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ロボットシステムのための光源を用いる遠隔運動中心の定義 |
| KR102560873B1 (ko) | 2014-03-17 | 2023-07-31 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 액추에이터 제어식 수술 기기용 인디케이터 기구 |
| KR102446091B1 (ko) | 2014-03-17 | 2022-09-22 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 촬상 장치 및 입력 컨트롤 중심복귀 시스템 및 방법 |
| WO2015189839A1 (en) * | 2014-06-08 | 2015-12-17 | M.S.T. Medical Surgery Technologies Ltd. | Device and method for assisting laparoscopic surgery utilizing a touch screen |
| JP6001217B1 (ja) * | 2014-10-22 | 2016-10-05 | オリンパス株式会社 | 内視鏡挿入形状観測装置 |
| US20160206179A1 (en) * | 2015-01-15 | 2016-07-21 | National Taiwan University | Assistive robot endoscopic system with intuitive maneuverability for laparoscopic surgery and method thereof |
| JP6104479B2 (ja) * | 2015-02-26 | 2017-03-29 | オリンパス株式会社 | マニピュレータシステム |
| CN107920863B (zh) * | 2015-08-13 | 2021-12-31 | 西门子医疗有限公司 | 用于控制包括成像模态的系统的设备和方法 |
| CN108882964B (zh) * | 2015-10-09 | 2021-10-22 | 柯惠Lp公司 | 使用成角度内窥镜运用机器人手术系统使体腔可视化的方法 |
| WO2018104376A1 (en) | 2016-12-07 | 2018-06-14 | Koninklijke Philips N.V. | Automatic motion control of a dependent surgical robotic arm |
| WO2018225132A1 (ja) * | 2017-06-05 | 2018-12-13 | オリンパス株式会社 | 医療システムおよび医療システムの作動方法 |
| EP3644889A4 (en) * | 2017-06-28 | 2021-04-07 | Intuitive Surgical Operations, Inc. | SYSTEMS AND METHODS FOR PROJECTING AN ENDOSCOPIC IMAGE ON A THREE-DIMENSIONAL VOLUME |
| WO2019008942A1 (ja) * | 2017-07-03 | 2019-01-10 | 富士フイルム株式会社 | 医療画像処理装置、内視鏡装置、診断支援装置、医療業務支援装置、及び、レポート作成支援装置 |
| EP3700453A4 (en) | 2017-10-25 | 2020-12-16 | Intuitive Surgical Operations Inc. | SYSTEM AND METHOD FOR REPOSITIONING INPUT CONTROL DEVICES |
| JP7115493B2 (ja) * | 2017-11-01 | 2022-08-09 | ソニーグループ株式会社 | 手術アームシステム及び手術アーム制御システム |
| JP2021510327A (ja) | 2018-01-10 | 2021-04-22 | コヴィディエン リミテッド パートナーシップ | コンピュータビジョンを利用したロボット外科システムのツールの位置および状態の判定 |
| US11304692B2 (en) | 2018-07-16 | 2022-04-19 | Cilag Gmbh International | Singular EMR source emitter assembly |
| US12257013B2 (en) | 2019-03-15 | 2025-03-25 | Cilag Gmbh International | Robotic surgical systems with mechanisms for scaling camera magnification according to proximity of surgical tool to tissue |
| EP3753521B1 (de) * | 2019-06-19 | 2025-11-26 | Karl Storz SE & Co. KG | Medizinische handhabungsvorrichtung zur steuerung einer handhabungsvorrichtung |
| US20230009335A1 (en) * | 2019-12-12 | 2023-01-12 | Koninklijke Philips N.V. | Guided anatomical manipulation for endoscopic procedures |
| US11896442B2 (en) | 2019-12-30 | 2024-02-13 | Cilag Gmbh International | Surgical systems for proposing and corroborating organ portion removals |
| US11759283B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Surgical systems for generating three dimensional constructs of anatomical organs and coupling identified anatomical structures thereto |
| US11219501B2 (en) | 2019-12-30 | 2022-01-11 | Cilag Gmbh International | Visualization systems using structured light |
| US12207881B2 (en) | 2019-12-30 | 2025-01-28 | Cilag Gmbh International | Surgical systems correlating visualization data and powered surgical instrument data |
| US11284963B2 (en) | 2019-12-30 | 2022-03-29 | Cilag Gmbh International | Method of using imaging devices in surgery |
| US11776144B2 (en) | 2019-12-30 | 2023-10-03 | Cilag Gmbh International | System and method for determining, adjusting, and managing resection margin about a subject tissue |
| US12453592B2 (en) | 2019-12-30 | 2025-10-28 | Cilag Gmbh International | Adaptive surgical system control according to surgical smoke cloud characteristics |
| US11832996B2 (en) | 2019-12-30 | 2023-12-05 | Cilag Gmbh International | Analyzing surgical trends by a surgical system |
| US11648060B2 (en) | 2019-12-30 | 2023-05-16 | Cilag Gmbh International | Surgical system for overlaying surgical instrument data onto a virtual three dimensional construct of an organ |
| US12002571B2 (en) | 2019-12-30 | 2024-06-04 | Cilag Gmbh International | Dynamic surgical visualization systems |
| US12053223B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Adaptive surgical system control according to surgical smoke particulate characteristics |
| US11744667B2 (en) | 2019-12-30 | 2023-09-05 | Cilag Gmbh International | Adaptive visualization by a surgical system |
| JP6754150B1 (ja) * | 2020-02-12 | 2020-09-09 | リバーフィールド株式会社 | 手術用ロボット |
| WO2021202869A1 (en) | 2020-04-02 | 2021-10-07 | Intuitive Surgical Operations, Inc. | Devices for instrument use recording, devices for recording instrument reprocessing events, and related systems and methods |
| CN112450996A (zh) * | 2020-11-11 | 2021-03-09 | 北京科迈启元科技有限公司 | 软式内镜手术执行器及手术机器人系统 |
| USD1022197S1 (en) | 2020-11-19 | 2024-04-09 | Auris Health, Inc. | Endoscope |
| CN112587244A (zh) * | 2020-12-15 | 2021-04-02 | 深圳市精锋医疗科技有限公司 | 手术机器人及其控制方法、控制装置 |
| CN113855257B (zh) * | 2021-11-05 | 2024-03-12 | 佗道医疗科技有限公司 | 一种内窥镜位姿的自适应调整方法 |
| CN113786152B (zh) * | 2021-11-17 | 2022-02-08 | 极限人工智能有限公司 | 一种内窥镜镜头跟踪方法及内窥镜系统 |
| JP2023180371A (ja) * | 2022-06-09 | 2023-12-21 | 株式会社メディカロイド | 手術システム |
| CN115500950B (zh) * | 2022-10-12 | 2025-10-31 | 上海微创医疗机器人(集团)股份有限公司 | 内窥镜位姿调整方法、手术机器人及存储介质 |
| WO2025019679A1 (en) * | 2023-07-19 | 2025-01-23 | Intuitive Surgical Operations, Inc. | Positioning an imaging device to view a portion of an instrument during insertion of the instrument |
| GB2643759A (en) * | 2024-09-02 | 2026-03-04 | Univ Stellenbosch | Laparoscope positioning apparatus |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008228967A (ja) * | 2007-03-20 | 2008-10-02 | Hitachi Ltd | マスタ・スレーブ式マニピュレータシステム |
| US20090245600A1 (en) * | 2008-03-28 | 2009-10-01 | Intuitive Surgical, Inc. | Automated panning and digital zooming for robotic surgical systems |
| WO2013093761A2 (en) * | 2011-12-21 | 2013-06-27 | Koninklijke Philips Electronics N.V. | Overlay and motion compensation of structures from volumetric modalities onto video of an uncalibrated endoscope |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| US6463361B1 (en) | 1994-09-22 | 2002-10-08 | Computer Motion, Inc. | Speech interface for an automated endoscopic system |
| US5825982A (en) | 1995-09-15 | 1998-10-20 | Wright; James | Head cursor control interface for an automated endoscope system for optimal positioning |
| EP2316328B1 (en) * | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Wrap-around holding device for use with bronchoscopes |
| US8147503B2 (en) * | 2007-09-30 | 2012-04-03 | Intuitive Surgical Operations Inc. | Methods of locating and tracking robotic instruments in robotic surgical systems |
| US10258425B2 (en) * | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| US8620473B2 (en) * | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US20090074265A1 (en) * | 2007-09-17 | 2009-03-19 | Capsovision Inc. | Imaging review and navigation workstation system |
| US20100111389A1 (en) * | 2007-12-06 | 2010-05-06 | Siemens Medical Solutions Usa, Inc. | System and method for planning and guiding percutaneous procedures |
| WO2009084345A1 (ja) * | 2007-12-28 | 2009-07-09 | Olympus Medical Systems Corp. | 医療機器システム |
| US8864652B2 (en) * | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US20100331856A1 (en) * | 2008-12-12 | 2010-12-30 | Hansen Medical Inc. | Multiple flexible and steerable elongate instruments for minimally invasive operations |
| US8934003B2 (en) | 2010-01-08 | 2015-01-13 | Koninklijkle Philips N.V. | Uncalibrated visual servoing using real-time velocity optimization |
| JP6053673B2 (ja) * | 2011-04-28 | 2016-12-27 | オリンパス株式会社 | 蛍光観察装置とその画像表示方法 |
| WO2013027202A2 (en) * | 2011-08-21 | 2013-02-28 | M.S.T. Medical Surgery Technologies Ltd. | Device and method for asissting laparoscopic surgery - rule based approach |
| US9108318B2 (en) * | 2012-02-15 | 2015-08-18 | Intuitive Surgical Operations, Inc. | Switching control of an instrument to an input device upon the instrument entering a display area viewable by an operator of the input device |
| WO2013164826A1 (en) * | 2012-05-04 | 2013-11-07 | Given Imaging Ltd. | System and method for automatic navigation of a capsule based on image stream captured in-vivo |
| TWI517828B (zh) * | 2012-06-27 | 2016-01-21 | 國立交通大學 | 影像追蹤系統及其影像追蹤方法 |
| EP4184483B1 (en) * | 2013-12-20 | 2024-09-11 | Intuitive Surgical Operations, Inc. | Simulator system for medical procedure training |
-
2015
- 2015-01-29 WO PCT/IB2015/050665 patent/WO2015121765A1/en not_active Ceased
- 2015-01-29 US US15/117,001 patent/US10945796B2/en active Active
- 2015-01-29 EP EP15708304.9A patent/EP3104804B1/en active Active
- 2015-01-29 CN CN201580008132.1A patent/CN105992568B/zh active Active
- 2015-01-29 JP JP2016550719A patent/JP2017505202A/ja active Pending
-
2019
- 2019-12-09 JP JP2019221910A patent/JP6982605B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008228967A (ja) * | 2007-03-20 | 2008-10-02 | Hitachi Ltd | マスタ・スレーブ式マニピュレータシステム |
| US20090245600A1 (en) * | 2008-03-28 | 2009-10-01 | Intuitive Surgical, Inc. | Automated panning and digital zooming for robotic surgical systems |
| WO2013093761A2 (en) * | 2011-12-21 | 2013-06-27 | Koninklijke Philips Electronics N.V. | Overlay and motion compensation of structures from volumetric modalities onto video of an uncalibrated endoscope |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018143560A (ja) * | 2017-01-03 | 2018-09-20 | 上銀科技股▲フン▼有限公司 | 内視鏡を操縦するシステム及び方法 |
| US10624525B2 (en) | 2017-01-03 | 2020-04-21 | Hiwin Technologies Corp. | Endoscopic system and method for controlling the same |
| WO2023022257A1 (ko) * | 2021-08-19 | 2023-02-23 | 한국로봇융합연구원 | 복강경 카메라 홀더 로봇 제어시스템 및 제어방법 |
| WO2023145285A1 (ja) * | 2022-01-26 | 2023-08-03 | オリンパス株式会社 | 内視鏡システム、内視鏡システムの制御方法および記録媒体 |
| JPWO2023145285A1 (ja) * | 2022-01-26 | 2023-08-03 | ||
| JP7674528B2 (ja) | 2022-01-26 | 2025-05-09 | オリンパス株式会社 | 内視鏡システム、内視鏡システムの制御方法および記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020039934A (ja) | 2020-03-19 |
| CN105992568B (zh) | 2018-06-08 |
| JP6982605B2 (ja) | 2021-12-17 |
| EP3104804B1 (en) | 2021-12-15 |
| US10945796B2 (en) | 2021-03-16 |
| WO2015121765A1 (en) | 2015-08-20 |
| US20160354166A1 (en) | 2016-12-08 |
| EP3104804A1 (en) | 2016-12-21 |
| CN105992568A (zh) | 2016-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6982605B2 (ja) | 外科用器具可視性のロボット制御 | |
| US11413099B2 (en) | System, controller and method using virtual reality device for robotic surgery | |
| CN108472090B (zh) | 用于控制外科手术机器人的系统、控制单元和方法 | |
| US10675105B2 (en) | Controller definition of a robotic remote center of motion | |
| JP6629186B2 (ja) | 解剖学的特徴からの内視鏡のロボット制御 | |
| EP2822445B1 (en) | Overall endoscopic control system | |
| US12239380B2 (en) | Control unit, system and method for controlling hybrid robot having rigid proximal portion and flexible distal portion | |
| CN105616007B (zh) | 具有联动式控制模式的医疗机器人系统 | |
| JP6975131B2 (ja) | ボリュームイメージの対話型平面スライスからの内視鏡誘導 | |
| WO2015110929A1 (en) | Robotic control of an endoscope orientation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181025 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181108 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190423 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191209 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20191209 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20191216 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20191217 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200110 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200116 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200402 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20200728 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201023 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210225 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210325 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210325 |