JP2017209154A - 内視鏡システム - Google Patents
内視鏡システム Download PDFInfo
- Publication number
- JP2017209154A JP2017209154A JP2016102468A JP2016102468A JP2017209154A JP 2017209154 A JP2017209154 A JP 2017209154A JP 2016102468 A JP2016102468 A JP 2016102468A JP 2016102468 A JP2016102468 A JP 2016102468A JP 2017209154 A JP2017209154 A JP 2017209154A
- Authority
- JP
- Japan
- Prior art keywords
- image
- optical
- optical path
- images
- prism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 148
- 230000014509 gene expression Effects 0.000 claims abstract description 45
- 238000012545 processing Methods 0.000 claims abstract description 33
- 239000002131 composite material Substances 0.000 claims abstract description 15
- 239000000203 mixture Substances 0.000 claims abstract description 9
- 238000003384 imaging method Methods 0.000 claims description 19
- 238000004519 manufacturing process Methods 0.000 abstract description 6
- 230000010287 polarization Effects 0.000 description 18
- 230000004075 alteration Effects 0.000 description 11
- 238000012937 correction Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 11
- 238000003702 image correction Methods 0.000 description 9
- 238000000926 separation method Methods 0.000 description 9
- 201000009310 astigmatism Diseases 0.000 description 8
- 230000005499 meniscus Effects 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 239000006059 cover glass Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 210000004400 mucous membrane Anatomy 0.000 description 1
- 239000005342 prism glass Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000004304 visual acuity Effects 0.000 description 1
Images






Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Lenses (AREA)
- Endoscopes (AREA)
Abstract
Description
対物光学系と、対物光学系で得られた被写体像を2つのピントの異なる光学像に分割する光路分割部と、光学像を取得する撮像素子と、取得した2つの光学像を相対的にコントラストが高い画像を所定領域において選択し、合成画像を生成する画像合成処理部と、を有し、
光路分割部は、2つのプリズムからなり、
2つのプリズムの相対な位置関係を変化させることにより光路長差調整を行うプリズム駆動部により、所望の光路長差を有する2つの光学像を一つの撮像素子上に結像させるとともに、以下の条件式(1)、(2)を満足することを特徴とする。
0.01<limit_adj/im_ih<1 …(1)
0.01<limit_adj/fw<2 …(2)
ここで、
limit_adjは、光路長差調整を行うためのプリズム駆動部によるプリズムの調整可能距離、
im_ihは、撮像素子における像高、
fwは、対物光学系の通常観察時の焦点距離、
である。
0.01<limit_adj/im_ih<1 …(1)
0.01<limit_adj/fw<2 …(2)
ここで、
limit_adjは、光路長差調整を行うためのプリズム駆動部30によるプリズムの調整可能距離、
im_ihは、撮像素子22における像高、
fwは、対物光学系OBLの通常観察時の焦点距離、
である。
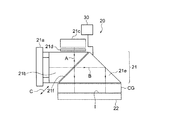
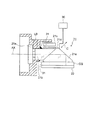
そこで、例えば、図2に示すように、この偏光状態が崩れた状態を円偏光に戻す様にλ/4板21aを、光路分割部20の偏光分離膜21fより物体側に配置することが好ましい。
0.01<limit_adj/im_ih<1 …(1)
0.01<limit_adj/fw<2 …(2)
ここで、
limit_adjは、光路長差調整を行うためのプリズム駆動部30によるプリズム21b、21eの調整可能距離、
im_ihは、撮像素子22における像高、
fwは、対物光学系OBLの通常観察時の焦点距離、
である。
条件式(1)の下限値を下回ると、プリズム21b、21eの調整可能距離が小さすぎるため、所望の光路長差に調整できないため好ましくない。
0.1<limit_adj/im_ih<0.5 …(1)’
さらに、条件式(1)に代えて、以下の条件式(1)”を満足することが望ましい。
0.2<limit_adj/im_ih<0.3 …(1)”
0.05<limit_adj/fw<1 …(2)’
さらに、条件式(2)に代えて、以下の条件式(2)”を満足することが望ましい。
0.1<limit_adj/fw<0.5 …(2)”
1<D_Pr01/limit_adj<30 …(3)
ここで、
D_Pr01は、2つのプリズム21b、21eのうち、物体側のプリズム21bの光軸上の長さ、
limit_adjは、光路長差調整を行うためのプリズム駆動部30によるプリズム21b、21eの調整可能距離、
である。
5<D_Pr01/limit_adj<20 …(3)’
さらに、条件式(3)に代えて、以下の条件式(3)”を満足することが望ましい。
10<D_Pr01/limit_adj<15 …(3)”
0.5<D_Pr01/fw<5 …(4)
1<D_Pr02/fw<10 …(5)
ここで、
D_Pr01は、2つのプリズム21b、21eのうち、物体側のプリズム21bの光軸上の長さ、
fwは、対物光学系OBLの通常観察時の焦点距離、
D_Pr02は、2つのプリズム21b、21eのうち、像側のプリズム21bの光軸上の長さ、
である。
1.0<D_Pr01/fw<3 …(4)’
さらに、条件式(4)に代えて、以下の条件式(4)”を満足することが望ましい。
1.5<D_Pr01/fw<2 …(4)”
2<D_Pr02/fw<5 …(5)’
さらに、条件式(5)に代えて、以下の条件式(5)”を満足することが望ましい。
2.5<D_Pr02/fw<3.5 …(5)”
次に、実施例1に係る内視鏡システムが有する対物光学系について説明する。
図8(a)、(b)は、対物光学系の断面構成を示す図である。ここで、図8(a)は、通常観察状態(遠距離物点)における対物光学系の断面構成を示す図である。図8(b)は、近接観察状態(近距離物点)における対物光学系の断面構成を示す図である。
図9(e)、(f)、(g)、(h)は、本実施例の近接観察状態における球面収差(SA)、非点収差(AS)、歪曲収差(DT)、倍率色収差(CC)を示す。
これら、諸収差図は、656.27nm(C線)、587.56nm(d線)、及び435.84nm(g線)の各波長について示されている。また、各図中、「ω」は半画角を示す。
単位 mm
面データ
面番号 r d nd νd
1 ∞ 0.49 1.88300 40.76
2 1.812 0.79
3 ∞ 0.84 1.52100 65.12
4 ∞ 0.34
5 -4.881 0.56 1.88300 40.76
6 1.866 2.13 1.84666 23.78
7 77.332 可変
8 2.010 0.81 1.48749 70.23
9 2.149 可変
10 3.354 1.13 1.64769 33.79
11 -1.665 0.32 2.00330 28.27
12 -9.987 0.04
13(絞り) ∞ 0.56
14 512.363 0.95 1.69895 30.13
15 -3.552 0.36
16 9.128 0.94 1.48749 70.23
17 -2.180 0.39 1.92286 18.90
18 -4.093 4.59
19(撮像面) ∞
データ
通常観察状態 近接観察状態
焦点距離 1.00 1.01
FNO. 3.58 3.53
画角2ω 144.9 139.4
fb (in air) 4.59 4.59
全長 (in air) 17.15 17.05
d7 0.47 1.20
d9 1.43 0.70
各群焦点距離
1群 2群 3群
-1.12 21.78 3.51
実施例1 実施例2 実施例3
(1) limit_adj/im_ih 0.10 0.31 0.20
(2) limit_adj/fw 0.10 0.30 0.20
(3) D_Pr01/limit_adj 20.00 3.33 7.00
(4) D_Pr01/fw 2.00 1.00 1.40
(5) D_Pr02/fw 3.00 1.50 2.10
パラメータ
実施例1 実施例2 実施例3
limit_adj 0.1 0.3 0.2
im_ih 0.983 0.983 0.983
D_Pr01 2 1 1.4
D_Pr02 3 1.5 2.1
fw 1 1 1
20 光路分割部
21 偏光ビームスプリッタ
21a λ/4板
21b 物体側のプリズム
21c ミラー
21d λ/4板
21e 像側のプリズム
21f 偏光分離膜
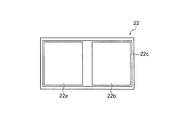
22 撮像素子
22a、22b 受光領域
22c 補正画素領域
23 画像プロセッサ
23a 画像読出部
23b 画像補正処理部
23c 画像合成処理部
23d 画像出力部
24 画像表示部
30 プリズム駆動部
CG カバーガラス
OBL 対物光学系
G1 第1レンズ群
G2 第2レンズ群
G3 第3レンズ群
S 明るさ絞り
L1−L19 レンズ
I 結像面
AX 光軸
Claims (3)
- 対物光学系と、前記対物光学系で得られた被写体像を2つのピントの異なる光学像に分割する光路分割部と、前記光学像を取得する撮像素子と、取得した2つの光学像を相対的にコントラストが高い画像を所定領域において選択し、合成画像を生成する画像合成処理部と、を有し、
前記光路分割部は、2つのプリズムからなり、
前記2つのプリズムの相対な位置関係を変化させることにより光路長差調整を行うプリズム駆動部により、所望の光路長差を有する前記2つの光学像を一つの前記撮像素子上に結像させるとともに、以下の条件式(1)、(2)を満足することを特徴とする内視鏡システム。
0.01<limit_adj/im_ih<1 …(1)
0.01<limit_adj/fw<2 …(2)
ここで、
limit_adjは、光路長差調整を行うための前記プリズム駆動部による前記プリズムの調整可能距離、
im_ihは、前記撮像素子における像高、
fwは、前記対物光学系の通常観察時の焦点距離、
である。 - 以下の条件式(3)を満足することを特徴とする請求項1に記載の内視鏡システム。
1<D_Pr01/limit_adj<30 …(3)
ここで、
D_Pr01は、前記2つのプリズムのうち、物体側の前記プリズムの光軸上の長さ、
limit_adjは、光路長差調整を行うための前記プリズム駆動部による前記プリズムの調整可能距離、
である。 - 以下の条件式(4)、(5)を満足することを特徴とする請求項1に記載の内視鏡システム。
0.5<D_Pr01/fw<5 …(4)
1<D_Pr02/fw<10 …(5)
ここで、
D_Pr01は、前記2つのプリズムのうち、物体側の前記プリズムの光軸上の長さ、
fwは、前記対物光学系の通常観察時の焦点距離、
D_Pr02は、前記2つのプリズムのうち、像側の前記プリズムの光軸上の長さ、
である。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016102468A JP2017209154A (ja) | 2016-05-23 | 2016-05-23 | 内視鏡システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016102468A JP2017209154A (ja) | 2016-05-23 | 2016-05-23 | 内視鏡システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017209154A true JP2017209154A (ja) | 2017-11-30 |
| JP2017209154A5 JP2017209154A5 (ja) | 2019-05-09 |
Family
ID=60474375
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016102468A Pending JP2017209154A (ja) | 2016-05-23 | 2016-05-23 | 内視鏡システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017209154A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019131748A1 (ja) * | 2017-12-28 | 2019-07-04 | 株式会社nittoh | レンズシステムおよび撮像装置 |
| WO2019167310A1 (ja) * | 2018-02-27 | 2019-09-06 | オリンパス株式会社 | 内視鏡用対物光学系 |
| WO2019187195A1 (ja) * | 2018-03-27 | 2019-10-03 | オリンパス株式会社 | 内視鏡用対物光学系 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05232305A (ja) * | 1992-02-21 | 1993-09-10 | Matsushita Electric Ind Co Ltd | 色分解プリズム装置 |
| JPH0735907A (ja) * | 1993-07-20 | 1995-02-07 | Matsushita Electric Ind Co Ltd | 色分解プリズム装置 |
| WO2014002740A1 (ja) * | 2012-06-28 | 2014-01-03 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
-
2016
- 2016-05-23 JP JP2016102468A patent/JP2017209154A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05232305A (ja) * | 1992-02-21 | 1993-09-10 | Matsushita Electric Ind Co Ltd | 色分解プリズム装置 |
| JPH0735907A (ja) * | 1993-07-20 | 1995-02-07 | Matsushita Electric Ind Co Ltd | 色分解プリズム装置 |
| WO2014002740A1 (ja) * | 2012-06-28 | 2014-01-03 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019131748A1 (ja) * | 2017-12-28 | 2019-07-04 | 株式会社nittoh | レンズシステムおよび撮像装置 |
| JPWO2019131748A1 (ja) * | 2017-12-28 | 2020-12-10 | 株式会社nittoh | レンズシステムおよび撮像装置 |
| JP7148154B2 (ja) | 2017-12-28 | 2022-10-05 | 株式会社nittoh | レンズシステムおよび撮像装置 |
| WO2019167310A1 (ja) * | 2018-02-27 | 2019-09-06 | オリンパス株式会社 | 内視鏡用対物光学系 |
| CN111527435A (zh) * | 2018-02-27 | 2020-08-11 | 奥林巴斯株式会社 | 内窥镜用物镜光学系统 |
| JPWO2019167310A1 (ja) * | 2018-02-27 | 2020-12-03 | オリンパス株式会社 | 対物光学系、及び内視鏡 |
| US11460676B2 (en) | 2018-02-27 | 2022-10-04 | Olympus Corporation | Objective optical system and endoscope |
| WO2019187195A1 (ja) * | 2018-03-27 | 2019-10-03 | オリンパス株式会社 | 内視鏡用対物光学系 |
| JPWO2019187195A1 (ja) * | 2018-03-27 | 2021-02-25 | オリンパス株式会社 | 対物光学系、撮像装置、内視鏡及び内視鏡システム |
| JP6995978B2 (ja) | 2018-03-27 | 2022-01-17 | オリンパス株式会社 | 内視鏡用対物光学系、撮像装置、内視鏡及び内視鏡システム |
| US11903560B2 (en) | 2018-03-27 | 2024-02-20 | Olympus Corporation | Objective optical system, image pickup apparatus, endoscope and endoscope system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6006464B1 (ja) | 内視鏡システム | |
| US9459443B2 (en) | Endoscopic objective optical system and imaging apparatus | |
| JP6498364B2 (ja) | 内視鏡システム及び内視鏡システムの調整方法 | |
| WO2017183371A1 (ja) | 内視鏡システム | |
| JP6513307B2 (ja) | 内視鏡システム | |
| WO2017119188A1 (ja) | 対物光学系 | |
| CN103562771B (zh) | 内窥镜物镜光学系统 | |
| US11857158B2 (en) | Optical system, endoscope apparatus and endoscope | |
| WO2017073292A1 (ja) | 内視鏡撮像ユニット | |
| JP2017209154A (ja) | 内視鏡システム | |
| JP6463573B1 (ja) | 内視鏡撮像システム | |
| JP6836466B2 (ja) | 内視鏡対物光学系 | |
| JP6363570B2 (ja) | ファインダーおよび撮像装置 | |
| JP6363818B1 (ja) | 内視鏡システム | |
| JP5611095B2 (ja) | ファインダー光学系及びそれを有する撮像装置 | |
| JP2009130625A (ja) | 画像撮影装置 | |
| JP2017219657A (ja) | 収差補正板及びそれを有する光学装置 | |
| JP2012242777A (ja) | アダプタ光学系及びそれを有する撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190319 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200311 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200916 |