JP2017191815A - 光周波数掃引レーザ光源、及びレーザレーダ - Google Patents
光周波数掃引レーザ光源、及びレーザレーダ Download PDFInfo
- Publication number
- JP2017191815A JP2017191815A JP2016078882A JP2016078882A JP2017191815A JP 2017191815 A JP2017191815 A JP 2017191815A JP 2016078882 A JP2016078882 A JP 2016078882A JP 2016078882 A JP2016078882 A JP 2016078882A JP 2017191815 A JP2017191815 A JP 2017191815A
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- signal
- laser light
- light source
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Semiconductor Lasers (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
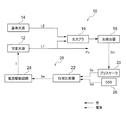
図1ないし図3を参照して、本実施の形態に係る光周波数掃引レーザ光源10について説明する。光周波数掃引レーザ光源10は、電気系の負帰還回路により周波数可変レーザ光源の出力レーザ光の周波数を制御する位相同期(Phase Locked Loop:PLL)制御部を基本的な構成として含んでいる。
光カプラ16は、可変光源12からの光信号L1と、基準光源14からの光信号L2とを合波する素子である。光検出器18は、合波された光信号L1と、光信号L2とを混合(ミキシング)し、光ヘテロダイン干渉を発生させる。光検出器18においてヘテロダイン検波されると、ダウンコンバートされた中間周波数のRF(Radio Frequency)電気信号Smが、光検出器18から出力される。
図4を参照して、本実施の形態に係る光周波数掃引レーザ光源70について説明する。
光周波数掃引レーザ光源70は、可変光源及び基準光源として上述したレーザ光源82を用い、レーザ光源の大部分を光導波路を用いた光集積回路技術により集積化した形態である。図4に示すように、光周波数掃引レーザ光源70は、SOA50、50、及び光集積回路72を含んで構成されている。
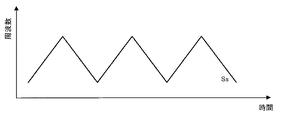
図5ないし図7を参照して、本実施の形態に係る光周波数掃引レーザ光源100について説明する。図5(a)は、光周波数掃引レーザ光源100の構成の一例を示すブロック図であり、図5(b)は、図5(a)中の乗算器106の具体的な構成を示すブロック図である。また、図6は、本実施の形態に係る掃引信号源の波形の一例を示す図であり、図7は、光周波数掃引レーザ光源100におけるデッドタイム除去処理について説明する図である。
12、12a 可変光源
14、14a 基準光源
16 光カプラ
18 光検出器
20 プリスケーラ
22 位相比較器
24 電流駆動回路
26 DDS
28 電気系回路
30 SOA
32 ヒータ
34 光フィルタ
36 アウトカプラ
38、40 導波路
42 レーザレーダ
50 SOA
52 ヒータ
54 光フィルタ
56 アウトカプラ
58、60、62 導波路
70 光周波数掃引レーザ光源
72 光集積回路
74 光カプラ
76 フォトダイオード
78 ヒータ
80、82 レーザ光源
100 光周波数掃引レーザ光源
102 VCO
104 基準遅延素子
106 乗算器
108 BPF
110 基準信号源
112 位相比較器
114 掃引信号源
116 加算器
118 スイッチ
120 スイッチ制御回路
130 電気系回路
132 光カプラ
134 光検出器
136 光カプラ
138 Y分岐
L、L1〜L4 光信号
M1、M2 反射面
Po 出力光
PT 送信レーザ光
PR 受信レーザ光
O 対象物
Sm RF電気信号
Sp 分周電気信号
Sd 基準掃引信号
Se 誤差信号
Sf 差周波信号
Ss 掃引信号
Sr 基準信号
Sc 制御信号
Sa 同期信号
Sw スイッチング制御信号
I 電流
d 距離
fb 周波数差
τ 遅延時間
τd 光路差
Claims (10)
- 外部信号に基づいて周波数の制御が可能な周波数可変レーザ光源と、
第1のレーザ光と第2のレーザ光とを干渉させて電気信号である差周波信号を生成する差周波生成部と、
時間の経過に伴って周波数が変化する掃引電気信号を発生する掃引信号源と、
前記差周波信号と前記掃引電気信号とに基づく位相同期制御により前記外部信号を生成する位相同期部と、を含み、
前記周波数可変レーザ光源から出力されるレーザ光を出力光とする
光周波数掃引レーザ光源。 - 前記第1のレーザ光が、前記周波数可変レーザ光源から出力されたレーザ光の一部であり、
前記第2のレーザ光を発生させる基準レーザ光源をさらに含み、
前記差周波生成部が、前記第1のレーザ光と前記第2のレーザ光とを合波して合波光を出力する合波部、及び前記合波光を受光しヘテロダイン干渉によって前記差周波信号を生成する光検出部を備える
請求項1に記載の光周波数掃引レーザ光源。 - 前記位相同期部が、前記差周波信号の位相と前記掃引電気信号の位相との差分を検出し誤差信号として出力する位相比較部、及び前記誤差信号に基づいて前記外部信号を生成する制御信号生成部を備える
請求項1又は請求項2に記載の光周波数掃引レーザ光源。 - 前記掃引信号源が、直接ディジタル信号発生器である
請求項1〜請求項3のいずれか1項に記載の光周波数掃引レーザ光源。 - 前記掃引電気信号が、時間の経過に伴って周波数が三角波状または鋸歯状に変化する
請求項1〜請求項4のいずれか1項に記載の光周波数掃引レーザ光源。 - 前記周波数可変レーザ光源から出力されたレーザ光を2分岐する分岐部と、
入力されたレーザ光に所定の遅延時間を付与する遅延部と、をさらに含み、
前記分岐部で分岐された一方の分岐光が前記第1のレーザ光とされ、他方の分岐光が前記遅延部によって前記遅延時間が付与されて前記第2のレーザ光とされ、
前記差周波生成部が、前記第1のレーザ光と前記第2のレーザ光とを合波して合波光を出力する合波部、及び前記合波光を受光しホモダイン干渉によって前記差周波信号を生成する光検出部を備える
請求項1に記載の光周波数掃引レーザ光源。 - 前記位相同期部が、基準信号を発生する基準信号源、前記差周波信号の位相と前記基準信号の位相との差分を検出し誤差信号として出力する位相比較部、及び前記誤差信号と前記掃引電気信号とを重畳させて前記外部信号を生成する加算部を備える
請求項1又は請求項6に記載の光周波数掃引レーザ光源。 - 前記掃引電気信号が、時間の経過に伴って周波数が三角波状または鋸歯状に変化する
請求項1、請求項6、及び請求項7のいずれか1項に記載の光周波数掃引レーザ光源。 - 前記掃引電気信号の周期に基づいて前記位相同期部による位相同期制御の開閉を制御する制御部をさらに含む
請求項1、請求項6〜請求項8のいずれか1項に記載の光周波数掃引レーザ光源。 - 請求項1〜請求項9のいずれか1項に記載の光周波数掃引レーザ光源と、
前記光周波数掃引レーザ光源からのレーザ光を走査し周波数変調連続波方式の送信レーザ光として出力する走査部と、
を含むレーザレーダ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078882A JP6844119B2 (ja) | 2016-04-11 | 2016-04-11 | 光周波数掃引レーザ光源、及びレーザレーダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078882A JP6844119B2 (ja) | 2016-04-11 | 2016-04-11 | 光周波数掃引レーザ光源、及びレーザレーダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017191815A true JP2017191815A (ja) | 2017-10-19 |
| JP6844119B2 JP6844119B2 (ja) | 2021-03-17 |
Family
ID=60086519
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016078882A Active JP6844119B2 (ja) | 2016-04-11 | 2016-04-11 | 光周波数掃引レーザ光源、及びレーザレーダ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6844119B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107769772A (zh) * | 2017-11-02 | 2018-03-06 | 中国科学院西安光学精密机械研究所 | 一种低晃动同步扫描电路系统 |
| CN111537979A (zh) * | 2020-04-30 | 2020-08-14 | 上海禾赛光电科技有限公司 | 激光雷达及其控制方法 |
| JP2020166061A (ja) * | 2019-03-28 | 2020-10-08 | 株式会社豊田中央研究所 | 光走査装置 |
| WO2020208927A1 (ja) * | 2019-04-12 | 2020-10-15 | ソニーセミコンダクタソリューションズ株式会社 | 発光駆動装置および発光装置 |
| KR20200125624A (ko) | 2018-03-06 | 2020-11-04 | 쇼와덴코머티리얼즈가부시끼가이샤 | 수지 조성물의 유동성 평가 방법, 수지 조성물의 선별 방법 및 반도체 장치의 제조 방법 |
| CN112204428A (zh) * | 2018-05-24 | 2021-01-08 | 三菱电机株式会社 | 光测距装置以及加工装置 |
| WO2021055125A1 (en) * | 2019-09-20 | 2021-03-25 | Intel Corporation | Methods and apparatus to control the optical frequency of a laser |
| JP2021118258A (ja) * | 2020-01-27 | 2021-08-10 | 国立研究開発法人産業技術総合研究所 | 光周波数掃引レーザ光源 |
| KR20210102455A (ko) * | 2019-01-04 | 2021-08-19 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 굴절 빔 조향 방법 및 시스템 |
| WO2022209309A1 (ja) * | 2021-03-30 | 2022-10-06 | パナソニックIpマネジメント株式会社 | 対象物の距離および/または速度を計測する装置および方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0653590A (ja) * | 1992-07-31 | 1994-02-25 | Hitachi Ltd | 光fsk周波数変位量安定化方式 |
| JPH06112572A (ja) * | 1992-09-30 | 1994-04-22 | Nippon Telegr & Teleph Corp <Ntt> | 光共振器および光周波数掃引光源 |
| JPH07264136A (ja) * | 1994-03-16 | 1995-10-13 | Ando Electric Co Ltd | 光pll回路 |
| JPH07270841A (ja) * | 1994-03-31 | 1995-10-20 | Ando Electric Co Ltd | 掃引光周波数発生装置 |
| JPH11274631A (ja) * | 1998-03-20 | 1999-10-08 | Ando Electric Co Ltd | 可変波長光源 |
| US20030103213A1 (en) * | 2001-12-05 | 2003-06-05 | Adams Frank J. | Calibrating a frequency difference between two or more lasers over an extended frequency range |
| US20090245306A1 (en) * | 2008-04-01 | 2009-10-01 | Telaris Inc. | High Performance Tunable Lasers Utilizing Optical Phase-Locked Loops |
| JP2010101642A (ja) * | 2008-10-21 | 2010-05-06 | Yamatake Corp | 物理量センサおよび物理量計測方法 |
| CN101800395A (zh) * | 2010-03-04 | 2010-08-11 | 浙江大学 | 数字化激光锁相装置和相位锁定方法 |
-
2016
- 2016-04-11 JP JP2016078882A patent/JP6844119B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0653590A (ja) * | 1992-07-31 | 1994-02-25 | Hitachi Ltd | 光fsk周波数変位量安定化方式 |
| JPH06112572A (ja) * | 1992-09-30 | 1994-04-22 | Nippon Telegr & Teleph Corp <Ntt> | 光共振器および光周波数掃引光源 |
| JPH07264136A (ja) * | 1994-03-16 | 1995-10-13 | Ando Electric Co Ltd | 光pll回路 |
| JPH07270841A (ja) * | 1994-03-31 | 1995-10-20 | Ando Electric Co Ltd | 掃引光周波数発生装置 |
| JPH11274631A (ja) * | 1998-03-20 | 1999-10-08 | Ando Electric Co Ltd | 可変波長光源 |
| US20030103213A1 (en) * | 2001-12-05 | 2003-06-05 | Adams Frank J. | Calibrating a frequency difference between two or more lasers over an extended frequency range |
| US20090245306A1 (en) * | 2008-04-01 | 2009-10-01 | Telaris Inc. | High Performance Tunable Lasers Utilizing Optical Phase-Locked Loops |
| JP2010101642A (ja) * | 2008-10-21 | 2010-05-06 | Yamatake Corp | 物理量センサおよび物理量計測方法 |
| CN101800395A (zh) * | 2010-03-04 | 2010-08-11 | 浙江大学 | 数字化激光锁相装置和相位锁定方法 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107769772A (zh) * | 2017-11-02 | 2018-03-06 | 中国科学院西安光学精密机械研究所 | 一种低晃动同步扫描电路系统 |
| CN107769772B (zh) * | 2017-11-02 | 2023-09-01 | 中国科学院西安光学精密机械研究所 | 一种低晃动同步扫描电路系统 |
| KR20200125624A (ko) | 2018-03-06 | 2020-11-04 | 쇼와덴코머티리얼즈가부시끼가이샤 | 수지 조성물의 유동성 평가 방법, 수지 조성물의 선별 방법 및 반도체 장치의 제조 방법 |
| DE112018007502B4 (de) | 2018-05-24 | 2024-06-06 | Mitsubishi Electric Corporation | Optische entfernungsmessvorrichtung und verarbeitungsvorrichtung |
| CN112204428B (zh) * | 2018-05-24 | 2024-03-22 | 三菱电机株式会社 | 光测距装置以及加工装置 |
| CN112204428A (zh) * | 2018-05-24 | 2021-01-08 | 三菱电机株式会社 | 光测距装置以及加工装置 |
| US11346651B2 (en) | 2018-05-24 | 2022-05-31 | Mitsubishi Electric Corporation | Optical distance measurement device and processing device |
| KR20210102455A (ko) * | 2019-01-04 | 2021-08-19 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 굴절 빔 조향 방법 및 시스템 |
| KR102384684B1 (ko) * | 2019-01-04 | 2022-04-08 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 굴절 빔 조향 방법 및 시스템 |
| JP7088114B2 (ja) | 2019-03-28 | 2022-06-21 | 株式会社豊田中央研究所 | 光走査装置 |
| JP2020166061A (ja) * | 2019-03-28 | 2020-10-08 | 株式会社豊田中央研究所 | 光走査装置 |
| WO2020208927A1 (ja) * | 2019-04-12 | 2020-10-15 | ソニーセミコンダクタソリューションズ株式会社 | 発光駆動装置および発光装置 |
| US11296483B2 (en) | 2019-09-20 | 2022-04-05 | Intel Corporation | Methods and apparatus to control the optical frequency of a laser |
| WO2021055125A1 (en) * | 2019-09-20 | 2021-03-25 | Intel Corporation | Methods and apparatus to control the optical frequency of a laser |
| JP2021118258A (ja) * | 2020-01-27 | 2021-08-10 | 国立研究開発法人産業技術総合研究所 | 光周波数掃引レーザ光源 |
| JP7376917B2 (ja) | 2020-01-27 | 2023-11-09 | 国立研究開発法人産業技術総合研究所 | 光周波数掃引レーザ光源 |
| CN111537979B (zh) * | 2020-04-30 | 2023-01-06 | 上海禾赛科技有限公司 | 激光雷达及其控制方法 |
| CN111537979A (zh) * | 2020-04-30 | 2020-08-14 | 上海禾赛光电科技有限公司 | 激光雷达及其控制方法 |
| WO2022209309A1 (ja) * | 2021-03-30 | 2022-10-06 | パナソニックIpマネジメント株式会社 | 対象物の距離および/または速度を計測する装置および方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6844119B2 (ja) | 2021-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6844119B2 (ja) | 光周波数掃引レーザ光源、及びレーザレーダ | |
| US11409185B2 (en) | Compact microresonator frequency comb | |
| CA2663990C (en) | Method and device for generating a synthetic wavelength | |
| Ghelfi et al. | Photonics in radar systems: RF integration for state-of-the-art functionality | |
| US4841519A (en) | Apparatus for discriminating an optical signal from others and an apparatus for tuning an optical wavelength filter used in the same | |
| US7023887B2 (en) | Method and system for controlling optical wavelength based on optical frequency pulling | |
| CN110572214B (zh) | 一种基于光注入锁定的频率调制信号产生的方法 | |
| CN109286124B (zh) | 激光线宽压缩方法及系统 | |
| CN110212989B (zh) | 基于循环移频的射频跳频信号产生方法及装置 | |
| WO2022095169A1 (zh) | 调频连续波激光雷达 | |
| CN111082872A (zh) | 一种基于电控扫频的傅里叶域锁模光电振荡器及实现方法 | |
| CN111740784A (zh) | 基于电光调制的微波光子复合调制合成极窄脉冲产生系统 | |
| Zhou et al. | Linear frequency-modulated waveform generation based on a tunable optoelectronic oscillator | |
| CN111289994A (zh) | 一种基于双外差混频的调频连续波激光雷达测距方法 | |
| Wei et al. | Self-injection locked oscillation of multi-mode laser in heterogeneously integrated silicon photonics | |
| JP6961185B1 (ja) | 光コム発生器制御装置 | |
| US20160359557A1 (en) | Tracking frequency conversion and network analyzer employing optical modulation | |
| KR102577072B1 (ko) | 전기 광학 주사방식을 이용한 주파수 변조 연속파 라이다 | |
| JP3803748B2 (ja) | 光学的ミリ波あるいはサブミリ波の発生装置 | |
| JP3575653B2 (ja) | 超高速同期パルス光源 | |
| Gao et al. | Low phase noise coherent transceiver front-end for X-band multichannel chirped radar based on phase-synchronous optoelectronic oscillator | |
| JP3974255B2 (ja) | 周波数可変レーザ光源装置 | |
| Ming | Optoelectronic THz Frequency Sweeping and Hopping Wave Generation | |
| CN105490135A (zh) | 一种毫米波频率产生装置 | |
| Tian et al. | LFM-Costas waveform generation based on a Fourier domain mode locking optoelectronic oscillator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200904 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6844119 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |