JP2017181766A - 水中監視装置、水上通信端末、及び水中監視システム - Google Patents
水中監視装置、水上通信端末、及び水中監視システム Download PDFInfo
- Publication number
- JP2017181766A JP2017181766A JP2016068486A JP2016068486A JP2017181766A JP 2017181766 A JP2017181766 A JP 2017181766A JP 2016068486 A JP2016068486 A JP 2016068486A JP 2016068486 A JP2016068486 A JP 2016068486A JP 2017181766 A JP2017181766 A JP 2017181766A
- Authority
- JP
- Japan
- Prior art keywords
- underwater
- unit
- underwater monitoring
- monitoring device
- water
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 227
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 title claims abstract description 138
- 238000004891 communication Methods 0.000 title claims abstract description 113
- 238000012806 monitoring device Methods 0.000 title claims description 108
- 238000003384 imaging method Methods 0.000 claims abstract description 42
- 230000008859 change Effects 0.000 claims description 6
- 238000007667 floating Methods 0.000 claims description 5
- 238000000034 method Methods 0.000 abstract description 15
- 241000251468 Actinopterygii Species 0.000 description 64
- 238000012545 processing Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 11
- 238000012986 modification Methods 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 238000012423 maintenance Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 241000283153 Cetacea Species 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 235000015170 shellfish Nutrition 0.000 description 2
- 239000000779 smoke Substances 0.000 description 2
- 241000276420 Lophius piscatorius Species 0.000 description 1
- 241000287463 Phalacrocorax Species 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 238000009360 aquaculture Methods 0.000 description 1
- 244000144974 aquaculture Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 230000009189 diving Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 235000014102 seafood Nutrition 0.000 description 1
- 239000013049 sediment Substances 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images







Landscapes
- Structure And Mechanism Of Cameras (AREA)
- Accessories Of Cameras (AREA)
- Closed-Circuit Television Systems (AREA)
- Studio Devices (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
Description
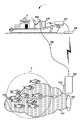
図1は、実施の形態に係る水中監視システム1の全体構成を模式的に示す図である。実施の形態に係る水中監視システム1は、例えば生け簀や漁場における魚群等の海産物や、鯨等の監視対象、海底調査ロボットの監視、海中を漂う逸失物や廃棄物等の探査等、水中に存在する監視対象をユーザUが水上から監視するためのシステムである。このため実施の形態に係る水中監視システム1は水中監視装置100を含み、水中監視装置100は水中の状況を撮影しながら監視対象を認識して追跡する。
なお水中監視装置100が撮影する「映像」は、いわゆる動画像の他に、複数の静止画像を間欠的に撮影して得られる静止画像が連続した静止画像群も含まれる。
以下本明細書では、ユーザUは船舶S上において海中の魚群Fを監視対象とする場合について説明する。なお魚群Fは、養殖場の魚群の場合もありうるし、外界における天然の魚群の場合もありうる。
以下、実施の形態に係る水中監視装置100及び水上通信端末200についてより詳細に説明する。
図2は、実施の形態に係る水中監視装置100及び水上通信端末200の機能構成を模式的に示す図である。実施の形態に係る水中監視装置100は、制御部102、通信部104、監視対象受付部106、通知部108、撮影部110、撮影方向変更部112、測距部114、水平移動部116、深度調整部118、高度計測部120、及び蓄電部122を備える。また水上通信端末200は、通信部202、移動指示部204、表示部206、及び対象指定部208を備える。
なお、ユーザは、水中監視装置100の各部を格納する防水耐圧容器を水上において開けることにより、水中監視装置100の内部部品のメンテナンスを容易にすることができる。
水上通信端末200の通信部202は水中監視装置100と通信する。通信部202は、例えば水中監視装置100の撮影部110が撮影した水中映像を受信する。表示部206は、水中監視装置100の撮影部110が撮影した水中映像を表示する。ここで撮影部110が撮影を開始した時点では、撮影部110は監視対象を捉えていないこともありうる。その場合、ユーザUが水中監視装置100を上下動させることができれば、監視対象を探す際に便利である。
そこで水上通信端末200は、水中監視装置100の深度調整部118に水中監視装置100の上下動の指示、すなわち水中監視装置100の浮力の調整の指示をする移動指示部204を備える。
図3に示す例では、水中映像表示領域226には監視対象である魚群Fは映っていない。そこでユーザUは、監視対象である魚群Fが映るまで上下移動指示アイコン220を操作して水中監視装置100を上下動させる。
実施の形態に係る撮影部110は広角レンズを備えているが、必ずしも全方位を撮影できるとは限らない。このためユーザUが監視対象を探すために、撮影部110を移動させてその撮影方向を変えることができれば、監視対象を探す際に便利である。
そこで水中監視装置100は、監視対象が撮影部110の撮影範囲に収まるように撮影部110を移動して撮影方向を変更する撮影方向変更部112を備える。撮影方向変更部112は、例えばステッピングモータ等の既知のアクチュエータで実現できる。
撮影部110が監視対象である魚群Fを捉えると、ユーザUは水中監視装置100に対して監視対象を指定することができる。具体的には、対象指定部208は、撮影部110が撮影し水中映像表示領域226に表示された水中映像に映っている監視対象の指定をユーザUから受け付ける。
図5は、実施の形態に係る水上通信端末200の対象指定部208を説明するための図であり、水上通信端末200の表示部206が表示する画面のさらに別の例を示す図である。ユーザUが水中映像表示領域226に表示された魚群Fをタップすると、対象指定部208は、監視対象であることを明示するための監視対象指示アイコン230を表示部206中に表示する。対象指定部208は、ユーザUから受け付けた監視対象の指定を水中監視装置100に送信する。
ここで、制御部102が監視対象を追跡して水中監視装置100を追従させたとしても、例えば監視対象の動きが速い等の場合には、撮影部110の撮影範囲130から監視対象を見失いそうになったり、見失ったりすることもあると考えられる。そこで制御部102は通知部108を制御して、監視対象が水中映像から消えた場合にその旨を水上通信端末200に通知させる。制御部102はまた、監視対象が水中映像から消えた場合、通知部108を制御して監視対象が消えた方向を示す情報を撮影部110が撮影した水中映像に描画させる。
撮影部110が撮影する水中映像から監視対象である魚群Fが消える場合としては、大きく分けて以下のふたつの場合が考えられる。
第1の場合は、水中監視装置100と魚群Fとの相対距離はあまり変動せずに魚群Fが映像中の縦又は横方向に移動したことによって撮影部110の画角から外れる場合である。第2の場合は、水中監視装置100と魚群Fとの相対距離が大きくなり、水の透明度等の影響で魚群Fが撮影されなくなる場合である。この他、第1の場合と第2の場合とが複合した第3の場合も考えられる。
このように、ユーザUは撮影部110が撮影する水中映像から監視対象である魚群Fが消えたこと、及び映像において魚群Fが消えた方向を知ることができる。
ここで、図7(b)で示す例のように、魚群Fが水中監視装置100から離れる方向に移動した場合には、水中監視装置100を上下方向に移動させたり、撮影部110の撮影方向を変えたりしても、魚群Fを撮影部110の画角に納めることはできない。
そこで実施の形態に係る水中監視装置100は、水中監視装置100と監視対象との間の対象物距離を測定する測距部114と、水中監視装置100を水平方向に移動させて対象物距離を変化させる水平移動部116も備えている。
実施の形態に係る水中監視装置100は水深100メートルの水圧にも耐えられるため、水深100メートルまで潜ることができる。しかしながら、水中監視装置100を潜水させる水域が必ずしも100メートル以上の水深があるとは限らず、場合によっては水深が100メートル未満である場合もありうる。この場合、例えばユーザUが上下移動指示アイコン220を操作して水中監視装置100を下に移動させると、水中監視装置100が水底に衝突しかねない。
なお図示はしないが、ユーザUは水上通信端末200の操作画面を操作することにより、衝突回避距離を自由に設定することができる。これにより、ユーザUは水中監視装置100を、例えば水底近くで群れをなす魚群の監視に用いたり、水底近くの沈殿物体の探索に用いたりすることができる。
以上、実施の形態に係る水中監視システム1を魚群Fの監視に利用する場合について主に説明した。しかしながら、水中監視システム1の利用シーンは上記に限られない。
例えば実施の形態に係る水中監視システム1は、養殖業者が養殖中の魚介類の生態を観測すること(例えば魚介類に病気が蔓延していないか否か等を観測すること)にも利用できる。水中監視システム1を生け簀に投入することにより、ユーザUは生け簀の中の魚の状態を手軽に監視することが可能となる。なお、24時間365日監視するため、蓄電部122の残量を確認しながら定期的に交換しつつ使用する水中監視装置100は継続して水中に投入するようにしてもよい。
また実施の形態に係る水中監視システム1は、水中航行体の監視にも利用できる。具体的には、水中監視システム1を、無人調査ロボットのような大型のロボット等が水中においてどのように稼働しているかの監視に利用できる。これにより、ロボット自身が出力する稼働データによる監視だけでなく、映像による客観的なロボットの観測が可能となるため、ロボットの実験開発等に有効である。
実施の形態に係る水中監視システム1の別の利用シーンとして、水中浮遊物/生物の観測も挙げられる。水中監視システム1を水中浮遊物に利用すれば、例えば災害地にて海中に沈んだ逸失物等の探索を、個人ベースで手軽に実施することができる。水中監視装置100は蓄電部122で駆動するため、電源ケーブルを引く手間を省くこともできる。また、水中監視システム1を、例えば鯨や珊瑚といった海中生物の観測等の学習や実習として利用することもできる。例えば珊瑚の観測等、水底を観測したい場合は、全方位カメラを用いるなどすれば水底面も含めて広範囲を観測できる。
以上説明したように、実施の形態に係る水中監視システム1によれば、水上から簡便に水中の監視対象を観察するための技術を提供することができる。
特に、実施の形態に係る水中監視装置100は、ユーザUから指定された監視対象を追跡して自動で水中を上下動するため、ユーザUは水中監視装置100の移動操作をしなくても監視対象の監視を継続することができる。また、水中監視装置100が撮影した水中映像は、水上にある水上通信端末200に送信される。このためユーザUは手元の水上通信端末200に表示された映像を見ながら、水中監視装置100に監視対象を指示できる。
上記では、水中監視装置100を水中に単独で投入して監視対象を監視する場合について説明した。しかしながら、水中監視装置100は他の機材と一緒に水中に投入してもよく、例えば釣り具と一緒に投入してもよい。
上記では、撮影部110が広角レンズである場合について説明した。撮影部110は広角レンズよりもさらに広い範囲を撮影できる魚眼レンズ等の超広角レンズや、周囲360度の方位が撮影可能な全方位レンズ等であってもよい。
上記では、深度調整部118がスラスタである場合について説明した。しかしながら、深度調整部118はスラスタ以外の機構を用いても実現できる。例えば深度調整部118は、図示しないバルブ調整による空気・ガスの吸入・排気機構により水中監視装置100に係る浮力を調整してもよい。あるいは、深度調整部118は、図示しない風船方式によるオイル吸入・排気機構により水中監視装置100に係る浮力を調整してもよい。
上記では、水中監視装置100をロープRや釣り糸520によって船舶Sからつるす場合について説明した。これに加えて、ロープRや釣り糸520に対し滑車で取り付けてもよい。これにより、ユーザUがロープRや釣り糸520の巻き取りや延長操作を行わずとも、ロープRや釣り糸520に沿って水中監視装置100を上下移動させることができる。
100・・・水中監視装置
102・・・制御部
104・・・通信部
106・・・監視対象受付部
108・・・通知部
110・・・撮影部
112・・・撮影方向変更部
114・・・測距部
116・・・水平移動部
118・・・深度調整部
120・・・高度計測部
122・・・蓄電部
200・・・水上通信端末
202・・・通信部
204・・・移動指示部
206・・・表示部
208・・・対象指定部
300・・・処理装置
400・・・中継装置
500・・・釣り竿
520・・・釣り糸
530・・・釣り針
F・・・魚群
S・・・船舶
R・・・ロープ
Claims (14)
- 水中監視装置であって、
水中において監視対象を撮影する撮影部と、
前記水中監視装置と前記監視対象との相対深度が維持されるように、前記水中監視装置を移動させる深度調整部と、
を備えることを特徴とする水中監視装置。 - 水上において前記水中監視装置を制御する水上通信端末と通信する通信部をさらに備え、
前記撮影部は、前記通信部を介して前記撮影部が撮影した水中映像を前記水上通信端末に送信する、
ことを特徴とする請求項1に記載の水中監視装置。 - 前記監視対象の指定を前記水上通信端末から受け付ける監視対象受付部をさらに備える、
ことを特徴とする請求項2に記載の水中監視装置。 - 前記監視対象が前記水中映像から消えた場合に前記水上通信端末に通知する通知部をさらに備えることを特徴とする請求項2又は3に記載の水中監視装置。
- 前記通知部は、前記監視対象が前記水中映像から消えた場合、前記監視対象が消えた方向を示す情報を前記水中映像に描画することを特徴とする請求項4に記載の水中監視装置。
- 前記水中監視装置の動力源となる蓄電部とをさらに備え、
前記通知部は、前記蓄電部の電池残量を前記水上通信端末に通知する、
ことを特徴とする請求項4又は5に記載の水中監視装置。 - 前記監視対象が前記撮影部の撮影範囲に収まるように撮影部の撮影方向を変更する撮影方向変更部をさらに備える、
ことを特徴とする請求項1から6のいずれか一項に記載の水中監視装置。 - 前記撮影部は、前記水中監視装置の全周囲を撮影可能な全方位レンズを備える、
ことを特徴とする請求項1から6のいずれか一項に記載の水中監視装置。 - 前記水中監視装置と前記監視対象との間の対象物距離を測定する測距部と、
前記水中監視装置を水平方向に移動させて前記対象物距離を変化させる水平移動部と、
をさらに備えることを特徴とする請求項1から8のいずれか一項に記載の水中監視装置。 - 前記水中監視装置と水底との間の距離を測定する高度計測部をさらに備え、
前記深度調整部は、前記水中監視装置と水底との間の距離が所定の距離以下となった場合、前記水中監視装置を水面側に移動する、
ことを特徴とする請求項1から9のいずれか一項に記載の水中監視装置。 - 水中で上下移動するための深度調整部と水中を撮影可能な撮影部とを備える水中監視装置と、水上において通信する通信部と、
前記水中監視装置の撮影部が撮影した水中映像を表示する表示部と、
前記撮影部が撮影した水中映像に撮影されている前記水中監視装置の監視対象を指定する対象指定部と、
前記水中監視装置の深度調整部に前記水中監視装置の移動を指示する移動指示部と、
を備えることを特徴とする水上通信端末。 - 請求項1から10のいずれか一項に記載の水中監視装置と、
水上において前記水中監視装置と通信する水上通信端末と、を備えることを特徴とする水中監視システム。 - 水面において前記水中監視装置と前記水上通信端末との間の通信を中継する中継装置をさらに備える、
ことを特徴とする請求項12に記載の水中監視システム。 - 一端が釣り針と接続されるとともに他端が釣り竿と接続され、前記釣り針と前記釣り竿との間で前記水中監視装置と接続された釣り糸を有する釣り具をさらに備える、
ことを特徴とする請求項12又は13に記載の水中監視システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016068486A JP2017181766A (ja) | 2016-03-30 | 2016-03-30 | 水中監視装置、水上通信端末、及び水中監視システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016068486A JP2017181766A (ja) | 2016-03-30 | 2016-03-30 | 水中監視装置、水上通信端末、及び水中監視システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017181766A true JP2017181766A (ja) | 2017-10-05 |
Family
ID=60006961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016068486A Pending JP2017181766A (ja) | 2016-03-30 | 2016-03-30 | 水中監視装置、水上通信端末、及び水中監視システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017181766A (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108540771A (zh) * | 2018-04-02 | 2018-09-14 | 深圳智达机械技术有限公司 | 一种高效的资源探测系统 |
| CN109699598A (zh) * | 2019-02-25 | 2019-05-03 | 刘德禄 | 一种无人机智能精确捕鱼器 |
| WO2019212807A1 (en) * | 2018-05-03 | 2019-11-07 | X Development Llc | Fish measurement station keeping |
| CN111722208A (zh) * | 2020-06-05 | 2020-09-29 | 中国水产科学研究院渔业机械仪器研究所 | 水下鱼群模拟均衡器及其均衡方法 |
| JP2020193918A (ja) * | 2019-05-29 | 2020-12-03 | 鉄 中尾 | 魚群探知機 |
| JP2021027460A (ja) * | 2019-08-05 | 2021-02-22 | 株式会社フジタ | 個体識別管理装置 |
| JP2021029226A (ja) * | 2019-08-29 | 2021-03-01 | グローブライド株式会社 | 外部の撒餌位置を検出可能な撒餌収容装置及び撒餌位置検出システム |
| JP6842100B1 (ja) * | 2019-08-28 | 2021-03-17 | ウミトロン ピーティーイー エルティーディー | 水棲動物検出装置、情報処理装置、端末装置、水棲動物検出システム、水棲動物検出方法、及び水棲動物検出プログラム |
| KR20210061229A (ko) * | 2019-11-19 | 2021-05-27 | 주식회사 쓰리아이 | 단말기 거치대의 제어방법 및 시스템 |
| WO2021101217A1 (ko) * | 2019-11-19 | 2021-05-27 | 주식회사 쓰리아이 | 단말기 거치대의 제어 및 화상 합성 방법 |
| WO2021130950A1 (ja) * | 2019-12-26 | 2021-07-01 | 日本電気株式会社 | 水中生物撮影支援装置、水中生物撮影支援方法および記憶媒体 |
| CN113100184A (zh) * | 2021-04-14 | 2021-07-13 | 黄鱼岛海洋渔业集团有限公司 | 一种无网声波捕鱼方法及其装置 |
| US11475689B2 (en) | 2020-01-06 | 2022-10-18 | X Development Llc | Fish biomass, shape, size, or health determination |
| WO2022244920A1 (ko) * | 2021-05-18 | 2022-11-24 | 주식회사 쓰리아이 | 휴대 단말기 및 단말기 거치대의 제어 방법 |
| US11575840B2 (en) | 2019-11-19 | 2023-02-07 | 3I Inc. | Method for controlling mobile device cradle and composing images |
| US12228389B2 (en) | 2019-12-26 | 2025-02-18 | Nec Corporation | Underwater organism imaging aid system, underwater organism imaging aid method, and storage medium |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000224576A (ja) * | 1999-01-29 | 2000-08-11 | Tokuji Terada | 水中水上同期撮影装置 |
| JP2001247087A (ja) * | 2000-03-06 | 2001-09-11 | Mitsui Eng & Shipbuild Co Ltd | 無人潜水機の航行方法および無人潜水機 |
| JP2001258445A (ja) * | 2000-03-17 | 2001-09-25 | Haruyuki Takahashi | 画像モニタ付き釣具 |
| JP2005013191A (ja) * | 2003-06-23 | 2005-01-20 | Asahi Denshi Kenkyusho:Kk | 魚釣り具及び魚釣り用浮き |
| JP2005341449A (ja) * | 2004-05-31 | 2005-12-08 | Toshiba Corp | デジタルスチルカメラ |
| JP2006248477A (ja) * | 2005-03-14 | 2006-09-21 | Mitsui Eng & Shipbuild Co Ltd | 水中航走体の航走制御方法及び水中航走体 |
| JP2011530692A (ja) * | 2008-05-21 | 2011-12-22 | ザ・ボーイング・カンパニー | 遠隔無人輸送手段群による構造物および物体の検査用システムおよび方法 |
| JP2012220859A (ja) * | 2011-04-13 | 2012-11-12 | Fujita Corp | 全方位撮影システム |
-
2016
- 2016-03-30 JP JP2016068486A patent/JP2017181766A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000224576A (ja) * | 1999-01-29 | 2000-08-11 | Tokuji Terada | 水中水上同期撮影装置 |
| JP2001247087A (ja) * | 2000-03-06 | 2001-09-11 | Mitsui Eng & Shipbuild Co Ltd | 無人潜水機の航行方法および無人潜水機 |
| JP2001258445A (ja) * | 2000-03-17 | 2001-09-25 | Haruyuki Takahashi | 画像モニタ付き釣具 |
| JP2005013191A (ja) * | 2003-06-23 | 2005-01-20 | Asahi Denshi Kenkyusho:Kk | 魚釣り具及び魚釣り用浮き |
| JP2005341449A (ja) * | 2004-05-31 | 2005-12-08 | Toshiba Corp | デジタルスチルカメラ |
| JP2006248477A (ja) * | 2005-03-14 | 2006-09-21 | Mitsui Eng & Shipbuild Co Ltd | 水中航走体の航走制御方法及び水中航走体 |
| JP2011530692A (ja) * | 2008-05-21 | 2011-12-22 | ザ・ボーイング・カンパニー | 遠隔無人輸送手段群による構造物および物体の検査用システムおよび方法 |
| JP2012220859A (ja) * | 2011-04-13 | 2012-11-12 | Fujita Corp | 全方位撮影システム |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108540771A (zh) * | 2018-04-02 | 2018-09-14 | 深圳智达机械技术有限公司 | 一种高效的资源探测系统 |
| JP2021511012A (ja) * | 2018-05-03 | 2021-05-06 | エックス デベロップメント エルエルシー | 魚測定ステーション管理 |
| JP7108033B2 (ja) | 2018-05-03 | 2022-07-27 | エックス デベロップメント エルエルシー | 魚測定ステーション管理 |
| US10534967B2 (en) | 2018-05-03 | 2020-01-14 | X Development Llc | Fish measurement station keeping |
| US12223723B2 (en) * | 2018-05-03 | 2025-02-11 | Tidalx Ai Inc. | Fish measurement station keeping |
| US12190592B2 (en) | 2018-05-03 | 2025-01-07 | Tidalx Ai Inc. | Fish measurement station keeping |
| US20210374427A1 (en) * | 2018-05-03 | 2021-12-02 | X Development Llc | Fish measurement station keeping |
| US11113539B2 (en) | 2018-05-03 | 2021-09-07 | X Development Llc | Fish measurement station keeping |
| US20230368538A1 (en) * | 2018-05-03 | 2023-11-16 | X Development Llc | Fish measurement station keeping |
| WO2019212807A1 (en) * | 2018-05-03 | 2019-11-07 | X Development Llc | Fish measurement station keeping |
| CN109699598A (zh) * | 2019-02-25 | 2019-05-03 | 刘德禄 | 一种无人机智能精确捕鱼器 |
| JP2020193918A (ja) * | 2019-05-29 | 2020-12-03 | 鉄 中尾 | 魚群探知機 |
| JP7261115B2 (ja) | 2019-08-05 | 2023-04-19 | 株式会社フジタ | 個体識別管理装置 |
| JP2021027460A (ja) * | 2019-08-05 | 2021-02-22 | 株式会社フジタ | 個体識別管理装置 |
| JP6842100B1 (ja) * | 2019-08-28 | 2021-03-17 | ウミトロン ピーティーイー エルティーディー | 水棲動物検出装置、情報処理装置、端末装置、水棲動物検出システム、水棲動物検出方法、及び水棲動物検出プログラム |
| JP2021029226A (ja) * | 2019-08-29 | 2021-03-01 | グローブライド株式会社 | 外部の撒餌位置を検出可能な撒餌収容装置及び撒餌位置検出システム |
| JP7165635B2 (ja) | 2019-08-29 | 2022-11-04 | グローブライド株式会社 | 外部の撒餌位置を検出可能な撒餌収容装置及び撒餌位置検出システム |
| KR102326877B1 (ko) * | 2019-11-19 | 2021-11-16 | 주식회사 쓰리아이 | 단말기 거치대의 제어방법 및 시스템 |
| US11575840B2 (en) | 2019-11-19 | 2023-02-07 | 3I Inc. | Method for controlling mobile device cradle and composing images |
| WO2021101217A1 (ko) * | 2019-11-19 | 2021-05-27 | 주식회사 쓰리아이 | 단말기 거치대의 제어 및 화상 합성 방법 |
| KR20210061229A (ko) * | 2019-11-19 | 2021-05-27 | 주식회사 쓰리아이 | 단말기 거치대의 제어방법 및 시스템 |
| JPWO2021130950A1 (ja) * | 2019-12-26 | 2021-07-01 | ||
| WO2021130950A1 (ja) * | 2019-12-26 | 2021-07-01 | 日本電気株式会社 | 水中生物撮影支援装置、水中生物撮影支援方法および記憶媒体 |
| US12228389B2 (en) | 2019-12-26 | 2025-02-18 | Nec Corporation | Underwater organism imaging aid system, underwater organism imaging aid method, and storage medium |
| JP7435625B2 (ja) | 2019-12-26 | 2024-02-21 | 日本電気株式会社 | 水中生物撮影支援装置、水中生物撮影支援方法および水中生物撮影支援プログラム |
| US11475689B2 (en) | 2020-01-06 | 2022-10-18 | X Development Llc | Fish biomass, shape, size, or health determination |
| US11756324B2 (en) | 2020-01-06 | 2023-09-12 | X Development Llc | Fish biomass, shape, size, or health determination |
| CN111722208A (zh) * | 2020-06-05 | 2020-09-29 | 中国水产科学研究院渔业机械仪器研究所 | 水下鱼群模拟均衡器及其均衡方法 |
| CN113100184A (zh) * | 2021-04-14 | 2021-07-13 | 黄鱼岛海洋渔业集团有限公司 | 一种无网声波捕鱼方法及其装置 |
| US12108157B2 (en) | 2021-05-18 | 2024-10-01 | 3I Inc. | Mobile device and method of controlling mobile device cradle |
| WO2022244920A1 (ko) * | 2021-05-18 | 2022-11-24 | 주식회사 쓰리아이 | 휴대 단말기 및 단말기 거치대의 제어 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017181766A (ja) | 水中監視装置、水上通信端末、及び水中監視システム | |
| CN208360444U (zh) | 一种无人船及系统 | |
| US11809179B2 (en) | Castable sonar devices and operations in a marine environment | |
| US20240008463A1 (en) | Fishing System and Method to Enhance the Fishing Experience | |
| WO2017140096A1 (zh) | 一种无人船及系统 | |
| KR101835107B1 (ko) | 어군 탐지용 드론 | |
| JP2023027254A (ja) | センサ位置決めシステム | |
| CN106530660A (zh) | 一种水下无人船控制系统 | |
| JP4808205B2 (ja) | インテリジェント型釣具 | |
| CN207052081U (zh) | 一种水下无人船控制系统 | |
| US20130107031A1 (en) | Underwater Digital Video Camera Recorder for Fishing | |
| CN106781371A (zh) | 一种水下无人船的通信系统 | |
| CN206601787U (zh) | 一种水下无人船的通信系统 | |
| WO2021136357A1 (zh) | 探鱼器、探鱼系统及探鱼方法 | |
| WO2018126900A1 (zh) | 一种无人船、具有捕鱼装置的无人船及无人船系统 | |
| CN107144845A (zh) | 一种无人船通讯方法 | |
| US20230046127A1 (en) | Aerial marine drone system and method | |
| JP2016129514A (ja) | 養殖水槽の水質監視装置及びそれを用いた養殖システム | |
| KR102181649B1 (ko) | 3자 시점 카메라를 갖는 스마트 수중 드론 시스템 | |
| JP2019089422A (ja) | 水中ドローンを用いた海底探査システム | |
| JP5805423B2 (ja) | 全方位撮影システム | |
| CN205378034U (zh) | 漂浮拍摄装置 | |
| JP2005073637A (ja) | 漁獲用海中網かご装置及びそれを用いて行う海中網かご漁法 | |
| JP7393290B2 (ja) | 遠隔制御システム、無人移動機、遠隔制御方法及びプログラム | |
| JPH1020382A (ja) | 水中観察装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190226 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190806 |