JP2017165513A - Picking system - Google Patents
Picking system Download PDFInfo
- Publication number
- JP2017165513A JP2017165513A JP2016050232A JP2016050232A JP2017165513A JP 2017165513 A JP2017165513 A JP 2017165513A JP 2016050232 A JP2016050232 A JP 2016050232A JP 2016050232 A JP2016050232 A JP 2016050232A JP 2017165513 A JP2017165513 A JP 2017165513A
- Authority
- JP
- Japan
- Prior art keywords
- shelf
- container
- picking
- moving
- article
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003384 imaging method Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
Images







Abstract
Description
本願発明は、所定の物品を受領容器に自動的に投入するピッキングシステムに関する。 The present invention relates to a picking system that automatically puts a predetermined article into a receiving container.
従来、オーダーに応じた複数種類の物品を受領容器に投入するピッキングシステムにピッキングロボットを導入し、ピッキング作業の自動化を図ったシステムが存在している。例えば、特許文献1に記載のピッキングシステムは、複数種類の物品が同一種類ごとに保管された棚からオーダーに応じた種類の物品をピッキングロボットがピックアップし、ピックアップされた物品をパレットに移載装置で移載する技術が記載されている。 Conventionally, there has been a system in which a picking robot is introduced to a picking system that puts a plurality of types of articles according to orders into a receiving container so as to automate the picking work. For example, in the picking system described in Patent Document 1, a picking robot picks up a type of article according to an order from a shelf in which a plurality of types of articles are stored for each type, and the picked-up article is transferred to a pallet The technology to be transferred in is described.
ところが、従来のピッキングシステムでは、オーダーに応じた種類の物品が一つの受領容器やパレットに揃わない場合は次の受領容器に物品を投入できないため、オーダーの内容によっては、効率的に物品を投入することが困難な場合があった。 However, in the conventional picking system, if the goods of the type corresponding to the order cannot be arranged in one receiving container or pallet, the goods cannot be put into the next receiving container. There were cases where it was difficult to do.
本願発明は、上記課題に鑑みなされたものであり、ピッキングロボットが一つの棚に保持されている複数の受領容器に対して物品をそれぞれ投入することのできるピッキングシステムの提供を目的としている。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a picking system that allows a picking robot to put articles into a plurality of receiving containers held on one shelf.
上記目的を達成するために、本願発明にかかるピッキングシステムは、受領容器に物品を投入するピッキングシステムであって、複数の受領容器を保持する棚と、前記棚に受領容器を移載する移載装置を有する搬送装置と、移動体を前記棚に対して移動させる移動装置と、前記移動体に取り付けられ、物品を前記棚に保持された受領容器に投入するピッキングロボットとを備えることを特徴とする。 In order to achieve the above object, a picking system according to the present invention is a picking system for loading an article into a receiving container, a shelf for holding a plurality of receiving containers, and a transfer for transferring a receiving container to the shelf. A transport device having a device, a moving device that moves a moving body relative to the shelf, and a picking robot that is attached to the moving body and that throws articles into a receiving container held on the shelf. To do.
これによれば、一台のピッキングロボットを移動体と共に移動させることにより、棚に保管された複数の受領容器に対し一種類の物品をそれぞれ投入することが可能となる。 According to this, by moving one picking robot together with the moving body, it is possible to put one type of article into each of the plurality of receiving containers stored on the shelf.
また、前記棚は、前記受領容器に投入する物品が収容された供給容器を保持する物品供給部を備えてもかまわない。 Further, the shelf may include an article supply unit that holds a supply container in which articles to be put into the receiving container are stored.
これによれば、一つの棚において、受領容器と供給容器を配置することができるため、ピッキングシステムの省スペース化を図ることが可能となる。また、物品を保持する供給容器を搬送装置で搬送し移載することができるため、ピッキング作業の効率化を図ることが可能となる。 According to this, since the receiving container and the supply container can be arranged in one shelf, it is possible to save the space of the picking system. In addition, since the supply container that holds the article can be transported and transferred by the transport device, the efficiency of the picking operation can be improved.
また、前記移動装置は、前記移動体に取り付けられ、前記受領容器に供給する物品が収容された供給容器を保持する容器保持手段を備えてもかまわない。 In addition, the moving device may include a container holding unit that holds the supply container that is attached to the moving body and stores an article to be supplied to the receiving container.
これによれば、ピッキングロボットが移動体と共に移動した場合でも、供給容器をピッキングロボットの近傍に常に配置することができ、また、受領容器に対し供給容器とピッキングロボットとを近づけることができるため、ピッキングロボットによるピッキング時間を短縮してピッキング作業の効率化を図ることが可能となる。 According to this, even when the picking robot moves together with the moving body, the supply container can always be arranged in the vicinity of the picking robot, and the supply container and the picking robot can be brought closer to the receiving container. It is possible to shorten the picking time by the picking robot and improve the efficiency of the picking work.
また、前記移動装置は、前記棚を挟んで前記搬送装置の反対側に配置されてもよい。 Further, the moving device may be arranged on the opposite side of the conveying device with the shelf interposed therebetween.
これによれば、移動装置と搬送装置とが干渉しないため、ピッキングロボットによるピッキング作業と受領容器の搬送とを独立して行うことができ、例えば、ピッキング作業中に受領容器の棚への搬出入を行うなどピッキングシステム全体の効率化を図ることが可能となる。 According to this, since the moving device and the transport device do not interfere with each other, the picking operation by the picking robot and the transport of the receiving container can be performed independently. For example, during the picking work, the receiving container can be carried in and out of the shelf. It is possible to improve the efficiency of the entire picking system.
また、前記棚は、第一棚と第二棚とを備え、前記移動体を前記第一棚と前記第二棚との間で移動させることで、前記ピッキングロボットは、前記第一棚に保持される受領容器、および、前記第二棚に保持される受領容器に物品を供給可能であってもかまわない。 The shelf includes a first shelf and a second shelf, and the picking robot is held on the first shelf by moving the movable body between the first shelf and the second shelf. It may be possible to supply goods to the receiving container to be received and the receiving container held on the second shelf.
これによれば、一台のピッキングロボットが複数の棚に保管される受領容器に物品を投入することができ、ピッキング作業と受領容器や供給容器の搬出入との工程を効率的に実行させることが可能となる。 According to this, one picking robot can put articles into receiving containers stored in a plurality of shelves, and efficiently perform the steps of picking work and loading / unloading of receiving containers and supply containers. Is possible.
本願発明によれば、自動ピッキングシステムの効率化を図ることが可能となる。 According to the present invention, it is possible to improve the efficiency of the automatic picking system.
次に、本願発明に係るピッキングシステムの実施の形態について、図面を参照しつつ説明する。なお、以下の実施の形態は、本願発明に係るピッキングシステムの一例を示したものに過ぎない。従って本願発明は、以下の実施の形態を参考に請求の範囲の文言によって範囲が画定されるものであり、以下の実施の形態のみに限定されるものではない。よって、以下の実施の形態における構成要素のうち、本発明の最上位概念を示す独立請求項に記載されていない構成要素については、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。 Next, an embodiment of a picking system according to the present invention will be described with reference to the drawings. The following embodiment is merely an example of the picking system according to the present invention. Accordingly, the scope of the present invention is defined by the wording of the claims with reference to the following embodiments, and is not limited to the following embodiments. Therefore, among the constituent elements in the following embodiments, constituent elements that are not described in the independent claims indicating the highest concept of the present invention are not necessarily required to achieve the object of the present invention. It will be described as constituting a preferred form.
また、図面は、本願発明を示すために適宜強調や省略、比率の調整を行った模式的な図となっており、実際の形状や位置関係、比率とは異なる場合がある。 Also, the drawings are schematic diagrams in which emphasis, omission, and ratio adjustment are performed as appropriate to show the present invention, and may differ from actual shapes, positional relationships, and ratios.
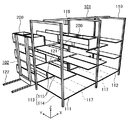
図1は、ピッキングシステムを示す斜視図である。 FIG. 1 is a perspective view showing a picking system.
同図に示すように、ピッキングシステム100は、受領容器200に紐付けられたオーダーに従って複数種類の物品(図示せず)を所定の個数投入するシステムであって、棚101と、搬送装置102と、移動装置103と、ピッキングロボット104とを備えている。また本実施の形態の場合、ピッキングシステム100は、容器保持手段105を備えている。
As shown in the figure, the
図2は、棚と搬送装置とを示す斜視図である。 FIG. 2 is a perspective view showing the shelf and the transfer device.
図3は、棚を示す正面図である。 FIG. 3 is a front view showing a shelf.
これらの図に示すように、棚101は、複数の受領容器200を保持する設備であり、受領容器を保持する保持部材である棚板113と、棚板113を所定の位置に保持するフレーム110とを備えている。本実施の形態の場合、棚101は、隣接して配置される第一棚111と第二棚112とを備えている。第一棚111に設けられる保持部材である棚板113は、受領容器200を載置状態で保持する部材であり、第一棚111の底部全体に拡がる底棚板114と、底棚板114の上方に配置される上棚板115とを備えている。底棚板114の幅方向(図中X軸方向)の中央部分の上部にはピッキングロボット104が移動可能な空間である移動空間116が存在しており、移動空間116を挟んだ両側に上棚板115がそれぞれ配置されている。上棚板115は、上下方向(図中Z軸方向)に配置されるフレーム110に片持ち状態で移動空間116に向かって突出するように配置されている。また、第一棚111は、底棚板114の幅方向の中央部分に受領容器200に供給する物品が収容された供給容器210を保持する物品供給部117を備えている。また、棚板113は、第一棚111の奥行き方向(図中Y軸方向)に受領容器200が複数(本実施の形態では二つ)個並べて保持することができるものとなっている。また、第一棚111と第二棚112とは同じ構造、形状となっている。第一棚111と第二棚112とはフレーム110を一部共有している。なお、移動空間116の上方には、下方に配置される供給容器210の中身である物品を撮像することができる撮像装置119を備えている。本実施の形態の場合、第一棚111、および、第二棚112の両方に撮像装置119が設けられているが、いずれか一方だけに設けてもかまわない。
As shown in these drawings, the
搬送装置102は、棚101と他の場所との間で受領容器200を搬送することができ、棚101に対し受領容器200を移載することのできる移載装置121を有する台車である。
The
本実施の形態の場合、搬送装置102は、棚101の一方側(図中Y軸方向正の側)に配置され、床面上に棚101に沿って敷設されたレール122に沿って移動し、棚101に対し所定の位置で停止した後、移載装置121を用いて棚101との間で受領容器200を移載するものとなっている。
In the case of the present embodiment, the
また、搬送装置102は、第一棚111において受領容器200が保管される位置に応じた数(本実施の形態では6台)の移載装置121を備えており、第一棚111の各棚板113に対して一度に受領容器200を移載することができるものとなっている。また、移載装置121は、第一棚111の奥行き方向(図中Y軸方向)に並べられた複数の受領容器200を一度に移載することができるものとなっている。つまり本実施の形態の場合、搬送装置102は、第一棚111が保持可能な全ての受領容器200を一度に搬送し、一度に第一棚111との間で移載することができるものとなっている。
Further, the
なお、搬送装置102は、第一棚111に一度に受領容器200を移載することができるものばかりでなく、移載装置121を昇降させる昇降手段を備え、各段の棚板113に対して移載装置121の高さを合わせて受領容器200を移載するものでもかまわない。また、搬送装置102はレール122上を移動するものばかりでなく、吊り下げられた状態で移動するものなどでもかまわない。
The
また、本実施の形態の場合、受領容器200と供給容器210の外観形状が同じであるため、搬送装置102は受領容器200ばかりでなく供給容器210を搬送することができ、移載装置121は、供給容器210を棚101の物品供給部117に対しても移載することができるものとなっている。
In the case of the present embodiment, since the appearance shapes of the receiving
図4は、棚と移動装置とを示す正面図である。 FIG. 4 is a front view showing the shelf and the moving device.
図5は、ピッキングロボットがピッキング作業を行う際の棚と移動装置とを示す側面図である。 FIG. 5 is a side view showing a shelf and a moving device when the picking robot performs picking work.
図6は、ピッキングロボットを第一棚と第二棚の間で移動させる際の棚と移動装置とを示す側面図である。 FIG. 6 is a side view showing a shelf and a moving device when the picking robot is moved between the first shelf and the second shelf.
同図に示すように、移動装置103は、ピッキングロボット104が取り付けられる移動体131を棚に101対して移動させる装置である。本実施の形態の場合、移動装置103は、棚101を挟んで搬送装置102の反対側に配置されている。
As shown in the figure, the moving
ここで移動体131は、移動装置103により移動させられる部材であり、ピッキングロボット104を保持するための部材である。本実施の形態の場合、移動装置103は、ピッキングロボット104を上下方向(図中Z軸方向)に移動させるばかりでなく、棚101の奥行き方向(図中Y軸方向)にも移動可能となっている。具体的には、移動体131は、棚101の奥行き方向に延在した棒状の部材となっており、棚101の奥行き方向における移動体131の出退によりピッキングロボット104は奥行き方向に移動する。
Here, the moving
移動装置103は、移動体131を介して移動空間116に配置されるピッキングロボット104(図4、図5参照)を上下方向に移動させることができる装置である。本実施の形態の場合、移動装置103はさらに、図6に示すように、移動体131と共にピッキングロボット104を棚101の外まで移動させ、当該状態で第一棚111と第二棚112との間でピッキングロボット104を幅方向(図中X軸方向)に移動させることができるものとなっている。
The moving
具体的に移動装置103は、棚101の幅方向の両端部に対応する位置に柱部材139をそれぞれ備える。また移動装置103は、二本の柱部材139の間に架橋状に配置され、柱部材139に対して上下方向に移動する梁部材138と、梁部材138に沿って移動するスライド部材137とを備えている。また、移動装置103のスライド部材137は、棚101の奥行き方向に移動体131をスライド可能に保持している。
Specifically, the moving
ピッキングロボット104は、移動体に取り付けられた状態で、棚101に保持された受領容器200に物品を投入することができる装置である。ピッキングロボット104の種類は、図中に示すような多関節ロボットに限定されるわけではなく、パラレルリンクロボットなどピッキング対象である物品の形状や重さなどに応じて任意のロボットを選択することができる。
The picking
容器保持手段105は、受領容器200に供給する物品が収容された供給容器210を保持することができる装置であり、移動体131に取り付けられてピッキングロボット104と共に移動装置103によって移動させられる装置である。
The container holding means 105 is an apparatus that can hold a
本実施の形態の場合、搬送装置102によって物品供給部117に移載された供給容器210を容器保持手段105は、保持することができる。また、容器保持手段105により保持された供給容器210は、ピッキングロボット104と共に移動装置103によって移動空間116や棚101の外方に移動することが可能となる。
In the case of this embodiment, the container holding means 105 can hold the
次に、ピッキングシステム100の動作を説明する。
Next, the operation of the
図7は、ピッキングシステムの動作の流れを示す図である。 FIG. 7 is a diagram illustrating an operation flow of the picking system.
搬送装置102の移載装置121は、空やオーダーが完了していない受領容器200を第一棚111の棚板113に移載する(S201)。第一棚111に移載される受領容器200の数などは特に限定されるものではない。なお、各受領容器200には、投入される物品の種類や数が示されるオーダー情報が紐付けられている。
The
次に、移載装置121は、前記オーダー情報に含まれる物品が収容される供給容器210を第一棚111の物品供給部117に移載する(S202)。
Next, the
次に、物品供給部117に保持された供給容器210内の物品を撮像装置119で撮像し、供給容器210内の物品の位置を把握する(S101)。
Next, the article in the
ここで、撮像の邪魔にならないように移動装置103は、移動体131を第一棚111の外方(図6参照)に退避させる(S301)。
Here, the moving
一方、撮像と同時期に、移載装置121は、新しい受領容器200を受け取るために例えば受領容器保管棚(図示せず)など棚101以外に移動する(S203)。
On the other hand, at the same time as imaging, the
次に、移動装置103は、容器保持手段105で供給容器210を保持することができる位置に移動体131を移動させる。移動が完了すると容器保持手段105は、供給容器210を保持する(S302)。
Next, the moving
容器保持手段105が供給容器210を保持した段階で、ピッキングロボット104は、物品供給部117に配置された供給容器210内の物品を保持できる位置であり、供給容器210と同じ高さに配置されている受領容器200に物品を投入できる位置に配置された状態となっている。ピッキングロボット104は、オーダー情報に従って底棚板114(図中下段)に保持されている供給容器210から受領容器200へ物品をピッキングする(S102)。
At the stage where the container holding means 105 holds the
第一棚111においてピッキングロボット104によるピッキング作業が行われている頃に、搬送装置102は、第二棚112に対し受領容器200を移載する(S204)。
When picking work is being performed on the
このように、ピッキングシステム100は、棚101を挟んで両側に搬送装置102と移動装置103とがそれぞれ配置され、第一棚111と第二棚112とを備えているため、第一棚111においてピッキングロボット104や移動装置103が動作中に搬送装置102が第二棚112に対して移載作業を行うことができ、効率的な運用が可能となる。
As described above, the
下段におけるピッキング作業が終了すると、移動装置103は、中段に対応する位置まで移動体131を移動空間116内において上昇させる(S303)。移動体131の上昇に伴ってピッキングロボット104と容器保持手段105に保持された供給容器210も中段に対応する位置まで上昇する。
When the picking work in the lower stage is completed, the moving
上昇が完了すると(可能であれば上昇中においても)ピッキングロボット104は、オーダー情報に従って中段に保持されている供給容器210から受領容器200へ物品をピッキングする(S103)。
When the raising is completed (if possible), the picking
このように、ピッキングロボット104と容器保持手段105が移動体131に取り付けられ同時に移動することで、ピッキングロボット104の近傍に供給容器210を配置することができ、また、ピッキングロボット104と供給容器210との位置関係が一定とできるため、ピッキングの場所が変わった場合でも常に同じような動作でピッキングロボット104はピッキング作業を行うことができる。従って、効率的なピッキングを行うことができる。
As described above, the picking
同様に、中段のピッキング作業が終了すると、移動装置103は移動体131を上段まで上昇させ(S304)、ピッキングロボット104は、上段においてピッキング作業を行う(S104)。
Similarly, when the middle picking operation is completed, the moving
第一棚111でのピッキング作業が終了すると、移動装置103は、移動体131を待避位置まで移動させた後、移動体131を第二棚112に保持している供給容器210と共に移動させる(S305)。
When the picking operation on the
移動体131の第一棚111からの退避が完了すると、搬送装置102の移載装置121は、オーダー情報に対応した受領容器200を第一棚111から回収する(S206)。
When the retracting of the moving
一方、第二棚112においては、上段から下段に向かってピッキング作業を順次行う(S105)。ピッキング作業が終了すると、搬送装置102の移載装置121は、オーダー情報に対応した受領容器200を第二棚112から回収する(S207)。また、容器保持手段105は、第二棚112の底棚板114の物品供給部117に供給容器210を載置する(S306)。第二棚112の物品供給部117に載置された供給容器210は、搬送装置102により回収される(S208)。
On the other hand, in the
上記の第一棚111から第二棚112への一連の作業を第二棚112でピッキング作業を行っている時に、第一棚111において、受領容器200や供給容器210の移載、供給容器210の撮像など一部時間的に重複させながら繰り返し実施することにより、自動的なピッキング作業を効率よく行うことが可能となる。
When a series of operations from the
以上の様に、ピッキングロボット104が移動体131に伴って移動することにより、一つの棚に保持されている複数の受領容器に対して物品を投入することが可能となり、効率的なピッキング作業を行うことが可能となる。
As described above, when the picking
なお、本願発明は、上記実施の形態に限定されるものではない。例えば、本明細書において記載した構成要素を任意に組み合わせて、また、構成要素のいくつかを除外して実現される別の実施の形態を本願発明の実施の形態としてもよい。また、上記実施の形態に対して本願発明の主旨、すなわち、請求の範囲に記載される文言が示す意味を逸脱しない範囲で当業者が思いつく各種変形を施して得られる変形例も本願発明に含まれる。 In addition, this invention is not limited to the said embodiment. For example, another embodiment realized by arbitrarily combining the components described in this specification and excluding some of the components may be used as an embodiment of the present invention. In addition, the present invention includes modifications obtained by making various modifications conceivable by those skilled in the art without departing from the gist of the present invention, that is, the meaning described in the claims. It is.
例えば、図8に示すように、棚101は、単数でもかまわない。また、供給容器210が配置される物品供給部117は、棚101において固定的でなくともよく、棚板113に供給容器210が配置された場合、当該場所が物品供給部117となる。
For example, as shown in FIG. 8, the
搬送装置102は、供給容器210を幅方向(図中X軸方向)および上下方向(図中Z軸方向)に移動させて、棚101の対応する保持部材113に供給容器210を移載するものでもかまわない。
The
移動装置103は、移動体131を1軸のみや2軸のみ移動させるものでもかまわない。また、移動体131に撮像装置119を取り付けてもかまわない。
The moving
また、棚101は、載置状態で受領容器200など保持する棚板113を備える場合を説明したが、受領容器200の保持態様は特に限定されるものではなく、受領容器200を吊り下げて保持するレールやフックなどを棚101が備えていてもかまわない。
Further, the case has been described in which the
また、搬送装置102に備えられる移載装置121は、受領容器200や供給容器210などの容器をクランプするものに限定されるものではなく、棚101における容器の保持態様に対応して、容器を下からすくい上げるフォークや、容器を押し引きして移載するフックを備えてもかまわない。
In addition, the
また、移動体131に取り付けられる容器保持手段105は、容器のフランジ部に引っかけて吊り下げ状態で保持するものに限定されるものではなく、容器を下から支え持つフォーク等を備えてもかまわない。
Further, the container holding means 105 attached to the moving
本願発明は、オーダーに応じた複数種類の物品を一つの容器に詰め合わせるピッキングシステムに利用可能である。 The present invention can be used in a picking system in which a plurality of types of articles according to orders are packed in one container.
100 ピッキングシステム
101 棚
102 搬送装置
103 移動装置
104 ピッキングロボット
105 容器保持手段
110 フレーム
111 第一棚
112 第二棚
113 棚板(保持部材)
114 底棚板
115 上棚板
116 移動空間
117 物品供給部
119 撮像装置
121 移載装置
122 レール
131 移動体
137 スライド部材
138 梁部材
139 柱部材
200 受領容器
210 供給容器
DESCRIPTION OF
114
Claims (5)
複数の受領容器を保持する棚と、
前記棚に受領容器を移載する移載装置を有する搬送装置と、
移動体を前記棚に対して移動させる移動装置と、
前記移動体に取り付けられ、物品を前記棚に保持された受領容器に投入するピッキングロボットと
を備えるピッキングシステム。 A picking system for loading an article into a receiving container,
A shelf holding a plurality of receiving containers;
A transfer device having a transfer device for transferring a receiving container to the shelf;
A moving device for moving a moving body relative to the shelf;
A picking system comprising: a picking robot attached to the moving body and for throwing articles into a receiving container held on the shelf.
請求項1に記載のピッキングシステム。 The picking system according to claim 1, wherein the shelf includes an article supply unit that holds a supply container in which an article to be supplied to the receiving container is stored.
前記移動体に取り付けられ、前記受領容器に供給する物品が収容された供給容器を保持する容器保持手段を備える
請求項1に記載のピッキングシステム。 The mobile device is
The picking system according to claim 1, further comprising: a container holding unit that holds a supply container that is attached to the movable body and that stores an article to be supplied to the receiving container.
請求項1〜3のいずれか一項に記載のピッキングシステム。 The picking system according to any one of claims 1 to 3, wherein the moving device is disposed on the opposite side of the conveying device with the shelf interposed therebetween.
前記移動体を前記第一棚と前記第二棚との間で移動させることで、前記ピッキングロボットは、前記第一棚に保持される受領容器、および、前記第二棚に保持される受領容器に物品を供給可能である
請求項1〜4のいずれか一項に記載のピッキングシステム。 The shelf includes a first shelf and a second shelf,
By moving the movable body between the first shelf and the second shelf, the picking robot can receive a container held on the first shelf and a receiver container held on the second shelf. The picking system according to any one of claims 1 to 4, wherein the article can be supplied.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016050232A JP6705227B2 (en) | 2016-03-14 | 2016-03-14 | Picking system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016050232A JP6705227B2 (en) | 2016-03-14 | 2016-03-14 | Picking system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017165513A true JP2017165513A (en) | 2017-09-21 |
| JP6705227B2 JP6705227B2 (en) | 2020-06-03 |
Family
ID=59912638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016050232A Expired - Fee Related JP6705227B2 (en) | 2016-03-14 | 2016-03-14 | Picking system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6705227B2 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019225234A1 (en) * | 2018-05-23 | 2019-11-28 | 株式会社ダイフク | Picking system |
| WO2020080825A1 (en) * | 2018-10-18 | 2020-04-23 | 주식회사 가치소프트 | Drawer-type pickup apparatus and method for receiving and releasing goods using same |
| CN112478552A (en) * | 2019-02-25 | 2021-03-12 | 牧今科技 | Storage system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06329208A (en) * | 1993-05-20 | 1994-11-29 | Kokusai Electric Co Ltd | Wafer carrying device of semiconductor manufacturing device |
| JPH06329211A (en) * | 1993-05-21 | 1994-11-29 | Mitsubishi Electric Corp | Loading device |
| JPH08268512A (en) * | 1995-04-03 | 1996-10-15 | Daifuku Co Ltd | Baggage storage device with substrate assorting unit |
| JPH1159817A (en) * | 1997-08-27 | 1999-03-02 | Takeshi Saigo | Automatic high-rise warehouse system |
| JP2010052878A (en) * | 2008-08-27 | 2010-03-11 | Murata Machinery Ltd | Picking system |
-
2016
- 2016-03-14 JP JP2016050232A patent/JP6705227B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06329208A (en) * | 1993-05-20 | 1994-11-29 | Kokusai Electric Co Ltd | Wafer carrying device of semiconductor manufacturing device |
| JPH06329211A (en) * | 1993-05-21 | 1994-11-29 | Mitsubishi Electric Corp | Loading device |
| JPH08268512A (en) * | 1995-04-03 | 1996-10-15 | Daifuku Co Ltd | Baggage storage device with substrate assorting unit |
| JPH1159817A (en) * | 1997-08-27 | 1999-03-02 | Takeshi Saigo | Automatic high-rise warehouse system |
| JP2010052878A (en) * | 2008-08-27 | 2010-03-11 | Murata Machinery Ltd | Picking system |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112074470B (en) * | 2018-05-23 | 2022-07-15 | 株式会社大福 | Picking system |
| CN114701792B (en) * | 2018-05-23 | 2024-03-01 | 株式会社大福 | Picking system |
| US11807458B2 (en) | 2018-05-23 | 2023-11-07 | Daifuku Co., Ltd. | Picking system |
| WO2019225234A1 (en) * | 2018-05-23 | 2019-11-28 | 株式会社ダイフク | Picking system |
| JPWO2019225234A1 (en) * | 2018-05-23 | 2020-12-10 | 株式会社ダイフク | Picking system (PICKING SYSTEM) |
| CN112074470A (en) * | 2018-05-23 | 2020-12-11 | 株式会社大福 | Picking system |
| TWI807019B (en) * | 2018-05-23 | 2023-07-01 | 日商大福股份有限公司 | Picking system |
| JP2021121569A (en) * | 2018-05-23 | 2021-08-26 | 株式会社ダイフク | Picking system (PICKING SYSTEM) |
| JP7140236B2 (en) | 2018-05-23 | 2022-09-21 | 株式会社ダイフク | Picking system (PICKING SYSTEM) |
| CN114701792A (en) * | 2018-05-23 | 2022-07-05 | 株式会社大福 | Picking system |
| KR102148391B1 (en) * | 2018-10-18 | 2020-08-27 | 주식회사 가치소프트 | Pick up device with drawer shape and method for receiving and delivering goods using the pickup device |
| KR20200043791A (en) * | 2018-10-18 | 2020-04-28 | 주식회사 가치소프트 | Pick up device with drawer shape and method for receiving and delivering goods using the pickup device |
| WO2020080825A1 (en) * | 2018-10-18 | 2020-04-23 | 주식회사 가치소프트 | Drawer-type pickup apparatus and method for receiving and releasing goods using same |
| CN112478552B (en) * | 2019-02-25 | 2022-02-25 | 牧今科技 | Storage system |
| CN112478552A (en) * | 2019-02-25 | 2021-03-12 | 牧今科技 | Storage system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6705227B2 (en) | 2020-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6315097B2 (en) | Picking system and picking method | |
| JP5516745B2 (en) | Sorting system and sorting method | |
| JP2017165513A (en) | Picking system | |
| JP2015040120A (en) | Arrangement determination method and stacking equipment | |
| CA2944671C (en) | A multi-storey goods storage arrangement | |
| JP6694126B2 (en) | 3D automated warehouse | |
| JP2015040118A (en) | Picking apparatus | |
| JP2018145004A (en) | Picking system and automatic warehouse system | |
| KR102306368B1 (en) | flat storage facility | |
| JP2011246223A (en) | Automatic warehouse | |
| JP2018154479A (en) | Multi-tier automatic warehouse | |
| JP5760925B2 (en) | Picking system | |
| JP7135243B2 (en) | Three-dimensional automated warehouse | |
| JP2018080028A (en) | Automated warehouse | |
| JP5811838B2 (en) | Goods storage equipment | |
| JP2006327772A (en) | Picking system | |
| JPH09240809A (en) | Article storing facility | |
| JP6476868B2 (en) | Picking system | |
| JP2005272053A (en) | Commodity storage facility | |
| JP6296247B2 (en) | Flat storage facility | |
| JP2015140223A (en) | Case transferring/mounting device | |
| JP2014051390A (en) | Automated warehouse | |
| JP7167390B2 (en) | Three-dimensional automated warehouse | |
| JP4650679B2 (en) | Article conveying device | |
| JP4521663B2 (en) | Goods storage equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200414 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6705227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |