JP2017143684A - 回転電機 - Google Patents
回転電機 Download PDFInfo
- Publication number
- JP2017143684A JP2017143684A JP2016024469A JP2016024469A JP2017143684A JP 2017143684 A JP2017143684 A JP 2017143684A JP 2016024469 A JP2016024469 A JP 2016024469A JP 2016024469 A JP2016024469 A JP 2016024469A JP 2017143684 A JP2017143684 A JP 2017143684A
- Authority
- JP
- Japan
- Prior art keywords
- cover
- stator coil
- thermistor
- main body
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Abstract
【課題】ステータコイルの温度を高精度に検出するとともに、サーミスタがカバーから脱落することを抑制する回転電機を提供することである。【解決手段】ステータコイル12の温度を検出するサーミスタモジュール40は、ステータコイル12を覆うカバー31の内側から貫通孔32に一端41aが挿入されている本体部41と、本体部41の他端41bに埋設されたサーミスタ素子42と、カバー31の内側において本体部41に一体的に設けられており、貫通孔32の径より大きい径を有するフランジ43とを備え、サーミスタモジュール40は、本体部41の他端41bがステータコイル12に押圧されて、フランジ43がカバー31の内面に向かって押圧された状態で、カバー31の内面とステータコイル12との間に挟持されている。【選択図】図2
Description
本発明は、回転電機に関し、特に、ステータコイルの温度を検出するサーミスタモジュールを備えた回転電機に関する。
モータジェネレータ等の回転電機のステータコイルは発熱するのでステータコイルの温度を検出する必要がある。ステータコイルの温度検出には、サーミスタが使用されるが、ステータコイルの温度を検出するためには、サーミスタをステータコイルの近くに配置する必要がある。サーミスタをステータコイルの近くに配置する構成の一例が特許文献1に開示されている。
特許文献1に記載の構成は、ステータコイルを覆うカバーの、ステータコイルのコイルエンドに対向する位置に設けられた貫通孔に、カバーの外側からサーミスタが取り付けられている。
ステータコイルの温度を高精度で検出するためには、サーミスタをステータコイルに近づける必要がある。特に、サーミスタをステータコイルの近傍に配置することによって、ステータコイルの温度を高精度に検出することが可能になる。
特許文献1に記載の構成では、サーミスタとステータコイルとは離間しているが、ステータコイルの温度を高精度に検出するために、サーミスタの先端部をステータコイルに当接させた場合、ステータコイルの振動がサーミスタに伝達する。この振動によりサーミスタのカバーへの取付が緩むことがある。また、この取付状態が緩んだ状態が長期に亘ると、サーミスタがカバーから脱落する可能性もある。
なお、モールドやワニス等の固定材を用いて、サーミスタをカバーに固定することが考えられるが、固定材が必要であるため固定材のコストや、固定材を用いた取付作業コストが発生してコストが増加してしまう。
そこで、本発明では、ステータコイルの温度を高精度に検出するとともに、サーミスタがカバーから脱落することを抑制する回転電機を提供することを目的とする。
本発明の回転電機は、回転電機のステータコイルと、前記ステータコイルの温度を検出するサーミスタモジュールと、前記ステータコイルを覆い、前記ステータコイルに対向する位置に前記サーミスタモジュールを保持する貫通孔を有するカバーとを備えた回転電機であって、前記サーミスタモジュールは、一端が前記カバーの内側から前記貫通孔に挿入されている本体部と、前記本体部の他端に埋設されたサーミスタ素子と、前記カバーの内側において前記本体部に一体的に設けられており、前記貫通孔の径より大きい径を有するフランジとを備え、前記本体部の他端が前記ステータコイルに押圧されて、前記フランジが前記カバーの内面に向かって押圧された状態で、前記カバーの内面と前記ステータコイルとの間に挟持されていることを特徴とする。
本発明によれば、ステータコイルの温度を高精度に検出できるとともに、サーミスタがカバーから脱落することを抑制できる。
本発明の実施形態における回転電機は、例えば、ハイブリッド自動車、電気自動車等に搭載されるモータジェネレータ1である。図1に示すように、モータジェネレータ1は、円環状のステータ10と、その内部に配置されるロータ20とを備えている。ステータ10の内周面とロータ20の外周面との間には、所定量のギャップが形成されている。
ステータ10は、筒状の磁性体からなるステータコア11と、このステータコア11の内周部に突設されて周方向に等間隔で配置された複数のティースの周囲に巻装されたステータコイル12とを備えている。ステータコア11は、それぞれ略円環状に打ち抜き加工された多数枚の電磁鋼板を軸方向に積層して一体に連結して構成されている。ステータコイル12は、ステータコア11の軸方向端面から外側へ突出するコイルエンド12a,12bを備えている。
ロータ20は、回転軸21と、この回転軸21の外周に固定される筒状のロータコア22と、ロータコア22に埋め込まれた図示しない永久磁石とを備えている。ロータコア22は、ステータコア11と同様に、それぞれ略円環状に打ち抜き加工された多数枚の電磁鋼板を軸方向に積層して一体に連結して構成されている。
ステータ10及びロータ20は、円筒状のケース30の内部に収容されている。ケース30には、ロータ20の回転軸21の一端を回転可能に支持する軸受部材30aが設けられている。ケース30には、ケース30の開口部を閉塞するカバー31が取り付けられている。
カバー31は、ステータコイル12の軸方向の一端側のコイルエンド12aを覆っている。カバー31には、ロータ20の回転軸21の他端を回転可能に支持する軸受部材31aが設けられている。カバー31のコイルエンド12aに対向する部分には、ステータコイル12の温度を検出するサーミスタモジュール40が取り付けられている。
また、ケース30及びカバー31の縁部には、フランジ30b、31bがそれぞれ形成されており、フランジ30b、31bが図示しないボルトによって締結固定されている。
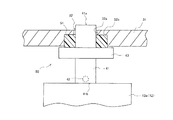
図2(A)にサーミスタモジュール40の取付部(図1におけるC部)の拡大断面図を示す。図2(A)に示すように、カバー31のコイルエンド12aに対向する部分には、サーミスタモジュール40を取り付けるための貫通孔32が形成されている。貫通孔32は、カバー31の内側に形成された大径部32aと、カバー31の外側に形成された小径部32bとを有する段付き加工されたざぐり形状である。大径部32aには、カバー31の内側と外側との間をシールするOリング33が配置されている。
小径部32bには、サーミスタモジュール40の一部が挿通されている。図2(A)に示すように、サーミスタモジュール40は、一端41aが貫通孔32の小径部32bに挿通し、他端41bがステータコイル12のコイルエンド12aに当接する円柱形状の本体部41と、本体部41の他端41bに埋設されたサーミスタ素子42と、本体部41に一体的に設けられたフランジ43と、本体部41に挿入された円環状の弾性部材44とを備えている。
サーミスタ素子42には、検出結果を出力する図示しないリード線が接続されており、このリード線は、本体部41の内部を通って本体部41の一端41aからカバー31の外部に延出している。
フランジ43は、大径部32aの径より大きい径を有しており、本体部41において、カバー31の内面とステータコイル12との間に位置している。すなわち、フランジ43はカバー31の内側に配置されている。本体部41及びフランジ43は耐熱性の樹脂から形成されている。弾性部材44は、フランジ43とカバー31の内面との間に配置されており、カバー31の内面に当接している。
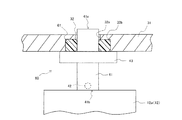
次に、サーミスタモジュール40の取付について説明する。図2(B)に示すように、カバー31をケース30に取り付ける前に、カバー31の内側からサーミスタモジュール40の本体部41の一端41aを貫通孔32の小径部32bに挿通する。この際、サーミスタモジュール40がカバー31から外れないように、接着材や小径部32bへの軽圧入等によりサーミスタモジュール40を仮止めすることが好ましい。
図1において、サーミスタモジュール40の他端41bがステータコイル12のコイルエンド12aに当接するように、カバー31をケース30に取り付ける。そして、ケース30のフランジ30b及びカバー31のフランジ31bをボルトによって締結固定する。
ここで、カバー31のケース30への固定前後における、カバー31の内面からサーミスタモジュール40の本体部41の他端41bまでの距離の変化について説明する。サーミスタモジュール40をカバー31に取り付けた状態(図2(B)参照)における、カバー31の内面から本体部41の他端41bまでの長さL1は、カバー31をケース30に固定した状態(図2(A)参照)のカバー31の内面とコイルエンド12aの先端との間隔L2よりも長くなるように設定されている。
このため、フランジ30b及びフランジ31bの締結固定によって、本体部41の他端41bがコイルエンド12aに当接して、サーミスタモジュール40は、コイルエンド12aによって図中矢印F方向に押圧される。長さL1は間隔L2より長いので、この押圧力によって弾性部材44が圧縮変形されて、サーミスタモジュール40は、カバー31の内面とコイルエンド12aとの間に挟持される。その結果、サーミスタモジュール40は、カバー31の内面とコイルエンド12aとの間においてガタつきなく保持される。
このように、サーミスタ素子42がコイルエンド12aの近傍に配置されるので、ステータコイル12の温度を高精度に検出することができる。また、フランジ43の径が大径部32aの径よりも大きいので、ステータコイル12の振動がサーミスタモジュール40に伝達して、サーミスタモジュール40の保持状態が緩んだとしても、サーミスタモジュール40が貫通孔32を通過してカバー31から脱落することを防止できる。さらに、サーミスタモジュール40の固定にモールドやワニス等の固定材を用いていないので、固定材のコストや固定材を用いた取付作業コストが発生せず、コストの増加を抑制することもできる。
次に、サーミスタモジュール40の変形例について説明する。図3に示すサーミスタモジュール50は、上述した実施形態の構成からOリング33を省略した構成である。図3に示すように、大径部32aにOリング33の代わりに弾性部材51を挿入する構成としている。弾性部材51の径を大径部32aよりも僅かに大きく設定し、また、その厚さを大径部32aの深さよりも僅かに大きく設定する。
このように設定することによって、サーミスタモジュール50を、カバー31の内面とコイルエンド12aとの間に挟持したときに、弾性部材51が大径部32aに圧入されて、カバー31の内側と外側との間をシールすることができる。この構成によって、Oリング33を省略することができコストダウンを図ることができる。
図4に示す変形例は、上述した実施形態の構成から弾性部材44を省略した構成である。図4に示すサーミスタモジュール60は、上述の実施形態で用いたOリング33の径よりも大きい径を有するOリング61を大径部32aに配置している。
このような、Oリング61を用いることによって、サーミスタモジュール60を、カバー31の内面とコイルエンド12aとの間に挟持したときに、Oリング61が圧縮されて、カバー31の内部と外部との間をシールするとともに、サーミスタモジュール60が、カバー31の内面とコイルエンド12aとの間に挟持される。この構成によって、弾性部材44を省略することができコストダウンを図ることができる。
以上説明した実施形態及び変形例では、サーミスタモジュール40,50,60をコイルエンド12aの上面(モータジェネレータ1の端面)に配置していたが、サーミスタモジュール40,50,60をコイルエンド12aの側面(モータジェネレータ1の端面に直交する方向)に配置してもよい。
1 モータジェネレータ、10 ステータ、11 ステータコア、12 ステータコイル、12a,12b コイルエンド、20 ロータ、21 回転軸、22 ロータコア、30 ケース、30a,31a 軸受部材、30b,31b,43 フランジ、31 カバー、32 貫通孔、32a 大径部、32b 小径部、33,61 Oリング、40,50,60 サーミスタモジュール、41 本体部、41a 一端、41b 他端、42 サーミスタ素子、44,51 弾性部材。
Claims (1)
- 回転電機のステータコイルと、前記ステータコイルの温度を検出するサーミスタモジュールと、前記ステータコイルを覆い、前記ステータコイルに対向する位置に前記サーミスタモジュールを保持する貫通孔を有するカバーとを備えた回転電機であって、
前記サーミスタモジュールは、
一端が前記カバーの内側から前記貫通孔に挿入されている本体部と、
前記本体部の他端に埋設されたサーミスタ素子と、
前記カバーの内側において前記本体部に一体的に設けられており、前記貫通孔の径より大きい径を有するフランジと、
を備え、
前記本体部の他端が前記ステータコイルに押圧されて、前記フランジが前記カバーの内面に向かって押圧された状態で、前記カバーの内面と前記ステータコイルとの間に挟持されていることを特徴とする回転電機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024469A JP2017143684A (ja) | 2016-02-12 | 2016-02-12 | 回転電機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024469A JP2017143684A (ja) | 2016-02-12 | 2016-02-12 | 回転電機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017143684A true JP2017143684A (ja) | 2017-08-17 |
Family
ID=59627575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016024469A Pending JP2017143684A (ja) | 2016-02-12 | 2016-02-12 | 回転電機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017143684A (ja) |
-
2016
- 2016-02-12 JP JP2016024469A patent/JP2017143684A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6249389B2 (ja) | 回転位置検出装置の製造方法 | |
| JP5333657B2 (ja) | 温度検出素子を隣接させる器具 | |
| JP5786642B2 (ja) | ステータ固定構造 | |
| CN1985424A (zh) | 旋转电机的磁铁固定结构 | |
| US11522407B2 (en) | Electronic apparatus | |
| CN209767318U (zh) | 电动致动器 | |
| US10107647B2 (en) | Fixation structure and resolver stator | |
| JP5803567B2 (ja) | ステータ固定構造 | |
| US20210384796A1 (en) | Motor | |
| CN110495078A (zh) | 马达 | |
| JP6789000B2 (ja) | 回転電機 | |
| CN105122611B (zh) | 混合动力车辆用旋转电机的转子保持结构 | |
| JP2016129473A (ja) | モータ | |
| WO2011027482A1 (ja) | 回転検出装置 | |
| JP2020122560A (ja) | 電動アクチュエータ | |
| JP2012244855A (ja) | 始動発電機 | |
| JP6058725B2 (ja) | 始動発電機 | |
| JP2008228367A (ja) | ブラシレスモータ | |
| JP2005269765A (ja) | 磁石式発電機 | |
| JP2019083611A (ja) | モータ | |
| JP2017143684A (ja) | 回転電機 | |
| JP5937458B2 (ja) | ステータ、ステータを用いたアウターロータ型回転電機、および、ステータの製造方法 | |
| JP2015216707A (ja) | モータおよびモータの製造方法 | |
| JP2020045985A (ja) | 電動アクチュエータ | |
| JP5953143B2 (ja) | 直流電動機の製造方法 |