JP2017140384A - 神経回路の調節のための集中型磁気刺激 - Google Patents
神経回路の調節のための集中型磁気刺激 Download PDFInfo
- Publication number
- JP2017140384A JP2017140384A JP2017013541A JP2017013541A JP2017140384A JP 2017140384 A JP2017140384 A JP 2017140384A JP 2017013541 A JP2017013541 A JP 2017013541A JP 2017013541 A JP2017013541 A JP 2017013541A JP 2017140384 A JP2017140384 A JP 2017140384A
- Authority
- JP
- Japan
- Prior art keywords
- neuromodulator
- array
- patient
- coil
- coils
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- SOLDADYIRQKIAE-UHFFFAOYSA-N C1C2=CCCC12 Chemical compound C1C2=CCCC12 SOLDADYIRQKIAE-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N2/00—Magnetotherapy
- A61N2/004—Magnetotherapy specially adapted for a specific therapy
- A61N2/006—Magnetotherapy specially adapted for a specific therapy for magnetic stimulation of nerve tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N2/00—Magnetotherapy
- A61N2/02—Magnetotherapy using magnetic fields produced by coils, including single turn loops or electromagnets
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Neurology (AREA)
- Magnetic Treatment Devices (AREA)
- Electrotherapy Devices (AREA)
Abstract
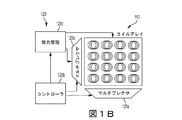
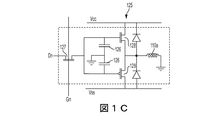
【解決手段】アレイ110に配置された導電コイル110aと、電流パルスを使用してアレイ110内の導電コイル110aを作動させ、電磁界を生み出すように接続された回路120とを含む、神経調節装置100である。前記回路120は、電流パルスの振幅および位相など、電流パルスの少なくとも1つ以上のパラメータを制御するように構成されている。これにより、前記電磁界は、患者101の関心の領域105における磁束密度を集中させ、かつ/または操縦する強め合いおよび弱め合いの干渉を被ることとなる。
【選択図】図1A
Description

Claims (10)
- アレイに配置された導電コイルと、
電磁界を生成する電流パルスを使用して前記アレイの前記コイルを作動させるように接続された回路と
を備えており、
前記回路は、前記電磁界が患者の関心の領域における磁束密度を集中させ、かつ/または操縦する強め合いおよび弱め合いの干渉を被るように、前記電流パルスの少なくとも振幅および位相を含む前記電流パルスの1つ以上のパラメータを制御するように構成されている、神経調節装置。 - 前記1つ以上の電流パルスパラメータは、デューティサイクルおよび周波数のうちの1つ以上をさらに含む、請求項1に記載の神経調節装置。
- 当該神経調節装置の分解能は、前記アレイの前記コイルのうちの1つのコイルの直径の約3倍である、請求項1に記載の神経調節装置。
- 前記コイルの各々は、複数の応力入り弾性部材を備える、請求項1に記載の神経調節装置。
- 前記複数の応力入り弾性部材は、
第1の固定部と第1の自由部とを備える第1の応力入り弾性部材と、
第2の固定部と第2の自由部とを備える第2の応力入り弾性部材と
を備えており、
前記第1の弾性部材における応力プロファイルが、前記第1の自由部を基板から離れるように付勢し、前記第2の弾性部材における応力プロファイルが、前記第2の自由部を前記基板から離れるように付勢し、前記第1の自由部と前記第2の自由部とが互いに接続されてループ巻き線を形成する、請求項4に記載の神経調節装置。 - 当該神経調節装置と外部の装置との間で通信信号を無線で伝達するように構成された通信回路をさらに備える、請求項1に記載の神経調節装置。
- 神経調節装置と、
患者情報装置と
を備えており、
前記神経調節装置は、
アレイに配置された導電コイルと、
電磁界を生成する電流パルスを使用して前記アレイの前記コイルを作動させるように接続され、前記電磁界が患者の関心の領域における磁束密度を集中させ、かつ/または操縦する強め合いおよび弱め合いの干渉を被るように、前記電流パルスの少なくとも振幅および位相を含む前記電流パルスの1つ以上のパラメータを制御するように構成された回路と、
該神経調節装置と外部の装置との間で通信信号を無線で伝達するように構成された通信回路と
を備えており、
前記患者情報装置は、前記神経調節装置に通信可能に接続され、前記患者の1つ以上の生体信号を監視して、該生体信号についての情報を前記通信信号によって前記神経調節装置へと伝達するように構成されている、神経調節システム。 - 前記関心の領域は、前記患者の体内の特定の深さに位置しており、前記関心の領域と前記神経調節装置との間の領域において前記神経調節装置によって生成される電界は、前記関心の領域における電界よりも小さい、請求項7に記載の神経調節システム。
- 患者の関心の領域に磁束密度をもたらす電磁界を生成する電流パルスを使用して、コイルのアレイ内のコイルを作動させるステップと、
前記電磁界が前記関心の領域へと前記磁束密度を集中させ、かつ/または操縦する強め合いおよび弱め合いの干渉を被るように、少なくとも振幅および位相を含む前記電流パルスの1つ以上のパラメータを制御するステップと
を含む神経調節方法。 - 前記パラメータを制御するステップは、前記患者から検出される生体信号に基づいて前記パラメータを動的に変化させることを含む、請求項9に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/019,702 US10307607B2 (en) | 2016-02-09 | 2016-02-09 | Focused magnetic stimulation for modulation of nerve circuits |
| US15/019,702 | 2016-02-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017140384A true JP2017140384A (ja) | 2017-08-17 |
| JP2017140384A5 JP2017140384A5 (ja) | 2020-02-27 |
Family
ID=57909545
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017013541A Pending JP2017140384A (ja) | 2016-02-09 | 2017-01-27 | 神経回路の調節のための集中型磁気刺激 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10307607B2 (ja) |
| EP (1) | EP3205372B1 (ja) |
| JP (1) | JP2017140384A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019129931A (ja) * | 2018-01-30 | 2019-08-08 | 国立大学法人北海道大学 | 磁気コイル装置、コイル群へ印加する電流の設定方法およびコイル群へ印加する電流を設定するプログラム |
| JP2019155087A (ja) * | 2018-03-15 | 2019-09-19 | パロ アルト リサーチ センター インコーポレイテッド | 磁気神経刺激に適したマイクロコイル |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3080293A1 (fr) * | 2018-04-23 | 2019-10-25 | Universite D'aix Marseille | Dispositif d'emission magnetique pour stimulation magnetique cerebrale non invasive et procede d'utilisation d'un tel dispositif |
| US11141585B2 (en) | 2018-12-28 | 2021-10-12 | Palo Alto Research Center Incorporated | Non-invasive neural interface |
| CA3136986A1 (en) | 2019-05-06 | 2020-11-12 | Kamran Ansari | Therapeutic arrays of planar coils configured to generate pulsed electromagnetic fields and integrated into clothing |
| US11020603B2 (en) | 2019-05-06 | 2021-06-01 | Kamran Ansari | Systems and methods of modulating electrical impulses in an animal brain using arrays of planar coils configured to generate pulsed electromagnetic fields and integrated into clothing |
| EP3756727A1 (en) * | 2019-06-25 | 2020-12-30 | Koninklijke Philips N.V. | Stimulation apparatus |
| KR102203696B1 (ko) * | 2020-09-03 | 2021-01-18 | (주)영인바이오텍 | 자기장 자극 장치 |
| US20230248980A1 (en) * | 2022-02-10 | 2023-08-10 | Ebr Systems, Inc. | Tissue stimulation systems and methods, such as for pacing cardiac tissue |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004503929A (ja) * | 2000-06-09 | 2004-02-05 | ゼロックス・コーポレーション | フォトグラフィックパターン形成による立体コイル構造及びその製造方法 |
| US20060199992A1 (en) * | 2003-03-17 | 2006-09-07 | Eisenberg Solomon R | Magnetic stimulator |
| JP2008518677A (ja) * | 2004-10-29 | 2008-06-05 | ニューロネティクス、インク. | 神経刺激を使って不快感を軽減するシステムおよび方法 |
| JP2009536073A (ja) * | 2006-05-05 | 2009-10-08 | ザ ボード オブ トラスティーズ オブ レランド スタンフォード ジュニア ユニバーシティ | トラジェクトリに基いた脳深部定位経側頭磁気刺激システム |
| JP2010536496A (ja) * | 2007-08-20 | 2010-12-02 | ネオスティム インコーポレイテッド | 深部脳経頭蓋磁気刺激の発射パターン |
| US20150283395A1 (en) * | 2014-04-04 | 2015-10-08 | Wilkes University | Real time monitoring and stimulation of human brain using superdirective near field arrays for focused transcranial magnetic stimulation |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3951134A (en) | 1974-08-05 | 1976-04-20 | Dorne & Margolin Inc. | Apparatus and method for remotely monitoring and altering brain waves |
| US5284144A (en) | 1989-11-22 | 1994-02-08 | The United States Of America As Represented By The Secretary Of The Dept. Of Health & Human Services | Apparatus for hyperthermia treatment of cancer |
| US6904323B2 (en) | 2003-05-14 | 2005-06-07 | Duke University | Non-invasive apparatus and method for providing RF energy-induced localized hyperthermia |
| US8834341B2 (en) * | 2007-05-02 | 2014-09-16 | Kenneth Stephen Olree | Coil optimization for magnetic stimulation |
| US20090018384A1 (en) * | 2007-05-09 | 2009-01-15 | Massachusetts Institute Of Technology | Portable, Modular Transcranial Magnetic Stimulation Device |
| US20080284674A1 (en) | 2007-05-15 | 2008-11-20 | Hrl Laboratories, Llc | Digital control architecture for a tunable impedance surface |
| US8956274B2 (en) | 2007-08-05 | 2015-02-17 | Cervel Neurotech, Inc. | Transcranial magnetic stimulation field shaping |
| DE102008021575A1 (de) | 2008-04-30 | 2009-11-05 | Neue Magnetodyn Gmbh | Vorrichtung zum Stimulieren eines Heilungsprozesses |
| DE202009000043U1 (de) | 2008-07-29 | 2009-05-20 | Ivoclar Vivadent Ag | Ausbrennbare, leicht fräsbare CAD Blöcke aus Schaumkunststoff |
| EP2174689A1 (en) | 2008-10-13 | 2010-04-14 | Oncotherm Kft. | Radiofrequency hyperthermia device with target feedback signal modulation |
| KR100994129B1 (ko) | 2008-10-27 | 2010-11-15 | 한국전자통신연구원 | 음의 유전율, 투자율 및 굴절률을 갖는 평판형 메타 물질, 그 메타 메질을 포함한 평판형 메타 물질 구조체 및 그 구조체를 포함한 안테나 시스템 |
| WO2010149164A2 (en) * | 2009-06-22 | 2010-12-29 | Re5 Aps | Apparatus and method for pulsed electrical field treatment |
| US20130096363A1 (en) | 2010-04-02 | 2013-04-18 | M. Bret Schneider | Neuromodulation of deep-brain targets by transcranial magnetic stimulation enhanced by transcranial direct current stimulation |
| US8306628B2 (en) | 2010-04-06 | 2012-11-06 | BDS Medical Corporation | Deep heating hyperthermia using phased arrays and patient positioning |
| US8581783B2 (en) | 2011-03-10 | 2013-11-12 | Teledyne Scientific & Imaging, Llc | Metamaterial-based direction-finding antenna systems |
| CN102784436B (zh) | 2011-05-16 | 2015-04-29 | 深圳光启高等理工研究院 | 微波热疗辐射器和微波热疗装置 |
| US9566426B2 (en) * | 2011-08-31 | 2017-02-14 | ElectroCore, LLC | Systems and methods for vagal nerve stimulation |
| US20160023016A1 (en) * | 2013-03-11 | 2016-01-28 | Giorgio Bonmassar | Eletromagnetic cortical stimulation device |
| ES2703600T3 (es) * | 2013-06-03 | 2019-03-11 | Nexstim Oyj | Dispositivo de bobina de estimulación magnética transcraneal multicanal con bobinas de arrollamiento superpuestas |
| US20150080637A1 (en) * | 2013-09-16 | 2015-03-19 | The General Hospital Corporation | Microscopic magnetic coils for neural stimulation |
| EP3119473A1 (en) * | 2014-03-17 | 2017-01-25 | The United States of America, as represented by The Secretary, Department of Health and Human Services | System with an electromagnetic field generator with coils for treating tumors and a method for treating tissue |
| WO2015175600A1 (en) * | 2014-05-13 | 2015-11-19 | The Cleveland Clinic Foundation | System and method for micromagnetic stimulation of the peripheral nervous system |
| US9972877B2 (en) | 2014-07-14 | 2018-05-15 | Palo Alto Research Center Incorporated | Metamaterial-based phase shifting element and phased array |
| US9545923B2 (en) | 2014-07-14 | 2017-01-17 | Palo Alto Research Center Incorporated | Metamaterial-based object-detection system |
| ES2974033T3 (es) | 2014-10-08 | 2024-06-25 | Massachusetts Inst Technology | Aparato para la estimulación de tejido biológico |
| US20160166843A1 (en) | 2014-12-11 | 2016-06-16 | Palo Alto Research Center Incorporated | Metamaterial phased array for hyperthermia therapy |
| US10092769B2 (en) * | 2015-01-29 | 2018-10-09 | Aerotel Ltd. | Apparatus for non-invasive therapy of biological tissue using directed magnetic beams |
-
2016
- 2016-02-09 US US15/019,702 patent/US10307607B2/en active Active
-
2017
- 2017-01-27 JP JP2017013541A patent/JP2017140384A/ja active Pending
- 2017-01-27 EP EP17153587.5A patent/EP3205372B1/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004503929A (ja) * | 2000-06-09 | 2004-02-05 | ゼロックス・コーポレーション | フォトグラフィックパターン形成による立体コイル構造及びその製造方法 |
| US20060199992A1 (en) * | 2003-03-17 | 2006-09-07 | Eisenberg Solomon R | Magnetic stimulator |
| JP2008518677A (ja) * | 2004-10-29 | 2008-06-05 | ニューロネティクス、インク. | 神経刺激を使って不快感を軽減するシステムおよび方法 |
| JP2009536073A (ja) * | 2006-05-05 | 2009-10-08 | ザ ボード オブ トラスティーズ オブ レランド スタンフォード ジュニア ユニバーシティ | トラジェクトリに基いた脳深部定位経側頭磁気刺激システム |
| JP2010536496A (ja) * | 2007-08-20 | 2010-12-02 | ネオスティム インコーポレイテッド | 深部脳経頭蓋磁気刺激の発射パターン |
| US20150283395A1 (en) * | 2014-04-04 | 2015-10-08 | Wilkes University | Real time monitoring and stimulation of human brain using superdirective near field arrays for focused transcranial magnetic stimulation |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019129931A (ja) * | 2018-01-30 | 2019-08-08 | 国立大学法人北海道大学 | 磁気コイル装置、コイル群へ印加する電流の設定方法およびコイル群へ印加する電流を設定するプログラム |
| JP6994758B2 (ja) | 2018-01-30 | 2022-01-14 | 国立大学法人北海道大学 | 磁気コイル装置、コイル群へ印加する電流の設定方法およびコイル群へ印加する電流を設定するプログラム |
| JP2019155087A (ja) * | 2018-03-15 | 2019-09-19 | パロ アルト リサーチ センター インコーポレイテッド | 磁気神経刺激に適したマイクロコイル |
| JP7137494B2 (ja) | 2018-03-15 | 2022-09-14 | パロ アルト リサーチ センター インコーポレイテッド | 磁気神経刺激に適したマイクロコイル |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170225004A1 (en) | 2017-08-10 |
| EP3205372B1 (en) | 2020-05-06 |
| EP3205372A1 (en) | 2017-08-16 |
| US10307607B2 (en) | 2019-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3205372B1 (en) | Neuromodulation device with coils comprising elastic members | |
| Khalifa et al. | The microbead: A 0.009 mm 3 implantable wireless neural stimulator | |
| US9192767B2 (en) | Microfabricated surface neurostimulation device and methods of making and using the same | |
| US8412332B2 (en) | Miniature wireless system for deep brain stimulation | |
| US8423143B2 (en) | Probe device for electrical stimulation and recording of the activity of excitable cells | |
| US8944985B2 (en) | Deep brain stimulation implant with microcoil array | |
| US10130274B2 (en) | PDMS-based stretchable multi-electrode and chemotrode array for epidural and subdural neuronal recording, electrical stimulation and drug delivery | |
| US10603505B2 (en) | Implantable neural probe | |
| JP2014508581A (ja) | 脊髄刺激のためのパリレンベースのマイクロ電極アレイインプラント | |
| CN106362279A (zh) | 刺激电极结构及人工视网膜的植入装置 | |
| US20140357933A1 (en) | Microscopic magnetic stimulation of neural tissue | |
| JP2022527987A (ja) | 可変振幅および波形による小型バイオデバイスへの磁気電気データおよび給電 | |
| US10426968B2 (en) | Neural modulation system | |
| US10449382B2 (en) | Implantable neural modulation device | |
| WO2017165530A1 (en) | Selective activation of cortex using bent micro-wires to magnetically stimulate neurons | |
| US10363128B2 (en) | Device and method for prosthetic rehabilitation of the retina | |
| Meyer et al. | Biomedical microdevices for neural interfaces | |
| JP4469926B2 (ja) | カフ型アクチュエータおよびカフ型インタフェース装置 | |
| KR20180017920A (ko) | 코일을 내재하는 생체 자극 구조체 | |
| JP2022521843A (ja) | ワイヤレスマイクロシミュレーションのためのデバイスおよび方法 | |
| US20240293673A1 (en) | Neurostimulator to aid in recovery from stroke or other limitations in human function | |
| Zaeimbashi | Methods and Techniques for Magnetic Neural Stimulation and Recording |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20170203 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200120 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200120 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200513 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200811 |