JP2017006248A - 電動歯ブラシ及びブラッシング部位推定方法 - Google Patents
電動歯ブラシ及びブラッシング部位推定方法 Download PDFInfo
- Publication number
- JP2017006248A JP2017006248A JP2015122896A JP2015122896A JP2017006248A JP 2017006248 A JP2017006248 A JP 2017006248A JP 2015122896 A JP2015122896 A JP 2015122896A JP 2015122896 A JP2015122896 A JP 2015122896A JP 2017006248 A JP2017006248 A JP 2017006248A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- brushing
- unit
- amplitude
- electric toothbrush
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Abstract
Description
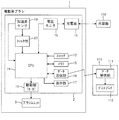
図1は、本発明の一実施形態を説明するためのブラッシング支援システムの概略構成を示す図である。このシステムは、電動歯ブラシ1と、充電器100と、表示器110と、を備える。
図3は、電動歯ブラシ1におけるブラッシング部位を推定する処理を説明するためのフローチャートである。
以上のように、電動歯ブラシ1に設けられた加速度センサ19から出力される信号の高周波成分の振幅と低周波成分の振幅に基づいて、ブラッシング部位の推定精度を向上させることが可能となる。したがって、効果的なブラッシング支援を行うことが可能となる。
3 ブラシユニット
11 駆動部
19 加速度センサ
20 フィルタ部
143 ブラッシング部位推定部
144 補正部
202 HPF
203 LPF
Claims (5)
- ブラシユニットを振動させる駆動部と、
加速度センサと、
前記加速度センサの出力信号から、周波数が第一の閾値以上となる第一の信号と、周波数が第二の閾値以下となる第二の信号とを抽出する信号抽出部と、
前記加速度センサの出力信号に基づいて前記ブラシユニットによるブラッシング部位を推定するブラッシング部位推定部と、
前記第一の信号の振幅と前記第二の信号の振幅とに基づいて、前記ブラッシング部位推定部により推定されたブラッシング部位を補正する補正部と、を備える電動歯ブラシ。 - 請求項1記載の電動歯ブラシであって、
前記補正部は、前記第一の信号の振幅の変動量が第三の閾値以上となり、かつ、前記第二の信号の振幅が第四の閾値以下となる第一の場合と、前記第一の信号の振幅の変動量が前記第三の閾値未満となり、かつ、前記第二の信号の振幅が前記第四の閾値を超える第二の場合に、前記補正を行う電動歯ブラシ。 - 請求項2記載の電動歯ブラシであって、
前記補正部は、前記第一の場合には、前記ブラッシング部位推定部により推定されたブラッシング部位を隣の部位に置換する電動歯ブラシ。 - 請求項2又は3記載の電動歯ブラシであって、
前記補正部は、前記第二の場合には、前記ブラッシング部位推定部により推定されたブラッシング部位を、前記第一の信号の振幅の変動量が前記第三の閾値未満となる直前の状態で前記ブラッシング部位推定部により推定されたブラッシング部位に置換する電動歯ブラシ。 - ブラシユニットを振動させる駆動部と加速度センサとを有する電動歯ブラシによるブラッシング部位推定方法であって、
前記加速度センサの出力信号から、周波数が第一の閾値以上となる第一の信号と、周波数が第二の閾値以下となる第二の信号とを抽出する信号抽出ステップと、
前記加速度センサの出力信号に基づいて前記ブラシユニットによるブラッシング部位を推定するブラッシング部位推定ステップと、
前記第一の信号の振幅と前記第二の信号の振幅とに基づいて、前記ブラッシング部位推定ステップにより推定したブラッシング部位を補正する補正ステップと、を備えるブラッシング部位推定方法。
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122896A JP6599656B2 (ja) | 2015-06-18 | 2015-06-18 | 電動歯ブラシ及びブラッシング部位推定方法 |
| EP16732102.5A EP3294202B1 (en) | 2015-06-18 | 2016-06-09 | Electric toothbrush device and method |
| AU2016280610A AU2016280610B2 (en) | 2015-06-18 | 2016-06-09 | Electric toothbrush device and method |
| EP19158343.4A EP3510970B1 (en) | 2015-06-18 | 2016-06-09 | Electric toothbrush device and method |
| CN201680033615.1A CN107735047B (zh) | 2015-06-18 | 2016-06-09 | 电动牙刷装置和方法 |
| CN202011184464.4A CN112515799B (zh) | 2015-06-18 | 2016-06-09 | 电动牙刷装置和方法 |
| PCT/US2016/036611 WO2016205055A1 (en) | 2015-06-18 | 2016-06-09 | Electric toothbrush device and method |
| US15/735,414 US10271933B2 (en) | 2015-06-18 | 2016-06-09 | Electric toothbrush device and method |
| AU2018241174A AU2018241174B2 (en) | 2015-06-18 | 2018-10-05 | Electric toothbrush device and method |
| US16/358,859 US10779924B2 (en) | 2015-06-18 | 2019-03-20 | Electric toothbrush device and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122896A JP6599656B2 (ja) | 2015-06-18 | 2015-06-18 | 電動歯ブラシ及びブラッシング部位推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017006248A true JP2017006248A (ja) | 2017-01-12 |
| JP6599656B2 JP6599656B2 (ja) | 2019-10-30 |
Family
ID=57760511
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015122896A Active JP6599656B2 (ja) | 2015-06-18 | 2015-06-18 | 電動歯ブラシ及びブラッシング部位推定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6599656B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107423669A (zh) * | 2017-04-18 | 2017-12-01 | 北京国科智途科技有限公司 | 一种基于视觉传感器的刷牙行为参数获取方法 |
| JP2021510316A (ja) * | 2018-01-10 | 2021-04-22 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 口腔ケア装置の位置の決定 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009240760A (ja) * | 2008-03-14 | 2009-10-22 | Omron Healthcare Co Ltd | 電動歯ブラシ |
| JP2011156204A (ja) * | 2010-02-02 | 2011-08-18 | Omron Healthcare Co Ltd | 口腔ケア装置 |
-
2015
- 2015-06-18 JP JP2015122896A patent/JP6599656B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009240760A (ja) * | 2008-03-14 | 2009-10-22 | Omron Healthcare Co Ltd | 電動歯ブラシ |
| JP2011156204A (ja) * | 2010-02-02 | 2011-08-18 | Omron Healthcare Co Ltd | 口腔ケア装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107423669A (zh) * | 2017-04-18 | 2017-12-01 | 北京国科智途科技有限公司 | 一种基于视觉传感器的刷牙行为参数获取方法 |
| JP2021510316A (ja) * | 2018-01-10 | 2021-04-22 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 口腔ケア装置の位置の決定 |
| JP7385574B2 (ja) | 2018-01-10 | 2023-11-22 | コーニンクレッカ フィリップス エヌ ヴェ | 口腔ケア装置の位置の決定 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6599656B2 (ja) | 2019-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10779924B2 (en) | Electric toothbrush device and method | |
| JP6771659B2 (ja) | 振動制御装置 | |
| CN108495575B (zh) | 用于基于位置和性能来提供引导和反馈的系统、方法和设备 | |
| JP2014054479A5 (ja) | ||
| EP2636361B1 (en) | Exercise monitoring using acceleration measurement | |
| US9962120B2 (en) | Sleep state management device, sleep state management method, and sleep state management program | |
| JP2011522448A (ja) | 共鳴検出のためのシステムと方法 | |
| JP2018514295A (ja) | 口腔衛生装置を操作するユーザに角度の誘導を提供するためのシステム及び方法 | |
| JP6599656B2 (ja) | 電動歯ブラシ及びブラッシング部位推定方法 | |
| US10395487B2 (en) | Haptic presentation apparatus, recognition apparatus, control apparatus, and haptic presentation method | |
| RU2724848C2 (ru) | Способы и системы для калибровки устройства для очистки полости рта | |
| TWI502167B (zh) | 計步方法及其電子裝置 | |
| EP3539505B1 (en) | Systems for minimizing drivetrain interference of sensors in an oral cleaning device | |
| JP5984589B2 (ja) | 電子機器およびプログラム | |
| KR101305858B1 (ko) | 모바일 기기를 이용한 물체 경도 측정방법, 장치 및 이를 이용한 모바일 기기 동작방법 | |
| JP2015011442A (ja) | 電子機器及びシステム | |
| JP2012233731A (ja) | 歩幅推測方法及び歩幅推測装置 | |
| JPWO2014122903A1 (ja) | 電子機器 | |
| JP5001669B2 (ja) | 歩数計 | |
| KR102329402B1 (ko) | 인코딩된 엔드 이펙터들과 사용하기 위한 시스템 및 관련된 사용 방법들 | |
| KR101773140B1 (ko) | 식사 시간 산출 방법 및 장치 | |
| JP6617235B1 (ja) | 角度計測モジュール、ポール、角度計測方法及びプログラム | |
| JP6511157B2 (ja) | 歩数計測装置及び歩数計測プログラム | |
| WO2017006624A1 (ja) | 行動通知システム、運動情報測定装置、電子機器、行動通知方法、行動通知プログラム | |
| JP5679606B2 (ja) | 携帯電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160706 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160708 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160708 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180404 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190814 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6599656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |