以下、本発明の実施形態を図面に示す実施例を参照しながら説明する。なお、本明細書において移植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後という。
図1に、本発明の実施の形態の苗移植機の左側面図を示し、図2に平面図を示す。
野菜などの苗を移植する苗移植機1は、図1、図2に示すように、走行車輪としての左右一対の前輪2および後輪3を備えた走行車体15と、走行車体15の前部に配置され、ボンネット109で覆われたエンジン12およびミッションケース4(主伝動ケースとも呼ぶ)と、走行車体15の後部に配置された、苗22(図7参照)を圃場に植え付けるべく植付具11を昇降させる苗植付装置300と、苗22を収容したトレイ20を供給するトレイ供給装置100と、トレイ供給装置100のトレイ20の育苗ポット21から苗22を取りだして植付具11へ供給する取出装置200と、苗の植付深さを一定に保つためのセンサ板710を含む植付深さ調整機構700(図13参照)と、鎮圧輪13、操縦ハンドル8、及び操縦ハンドル8の中央部に配置された操作部600等を備えて構成されている。
図16は、鎮圧輪13の支持構成を示す別実施例で、機体側の第一支持部34から後方に伸ばした支持アーム35に鎮圧輪13を軸支し、前側の第二支持部33に前へ支持した架台36とリンク38で支持アーム35を連結し、架台36に置く錘37を前後に移動調整すると鎮圧輪13の鎮圧力を調整出来る。
なお、鎮圧輪13を金網を巻いて筒状に成形すると泥土が付着し難い。
また、鎮圧輪13を側面視で三角状の無端ベルトとして、その無端ベルトを上方から供給する水で濡らすようにすると、畝に敷いたマルチフィルム上を走行しても滑らない。
また、マルチフィルムを敷いた畝に移植する場合に、機体の前部でマルチフィルムにブロアーからの風を吹き付けるようにすると、マルチフィルム上から水が飛んで移植穴を穿ち易くなる。
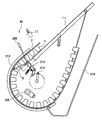
図17(a)は、鎮圧輪13の支持構成を示す別実施例で、支持アーム52の前端を主フレーム17の下部に前軸51で回動可能に軸支し、支持アーム52の後端を主フレーム17の後軸54に吊り下げる吊ロッド53で吊下げ、支持アーム52の前後中間部に鎮圧輪13を軸支している。吊ロッド53には圧縮バネ55と調節ネジ56で支持アーム52の押し下げ圧力を変更可能にしている。吊ロッド53の後軸54への取付は、ロックレバー57とリンク58で行い、図(b)の如くロックレバー57を横にすると吊ロッド53の上下動が可能になり、図(c)の如くロックレバー57の後部を持ち上げると吊ロッド53の上下動がロックされ、鎮圧輪13を鎮圧状態にする。
図1に戻り、エンジン12から出力される回転動力は、ミッションケース4により分岐され、左右一対の走行伝動ケース9を介して左右一対の後輪3に伝動され、後輪軸3aからベルト無段変速装置205でミッションケース4の後側に設けられた植付伝動装置18にも伝動される構成である。
即ち、本実施の形態の苗移植機1では、育苗ポット21から苗22を取り出して圃場の畝部に植付けるべく、ミッションケース4からの動力が後輪軸3を経てベルト無段変速装置205を介して植付伝動装置18に伝動されて、チェーンベルト202を介して取出装置200に伝動されるとともに、その植付伝動装置18に取り付けられた苗植付装置駆動機構400を介して植付具11に伝達される。
また、ミッションケース4から植付伝動装置18に伝動された動力の一部は、図2に示す通り、縦送り駆動チェーンベルト181を介して、後述する縦送り駆動軸151に伝達される。縦送り駆動時に伝達された動力の一部は、ギア機構182を介して後述するリードカム軸171に伝達される。これら縦送り駆動チェーンベルト181やギア機構182は苗送り伝動ケース180に収納されている。
また、ミッションケース4の後端の左右方向に配置された左右フレーム16の後部には、右寄りの位置に延びる主フレーム17を設けている。該主フレーム17の後端部には左右端側から後方に延びた操縦ハンドル8を設け、この操縦ハンドル8が主フレーム17および左右フレーム16を介してミッションケース4に支持された構成となっている。
これにより、作業者は、走行車体15の後方を歩きながら操縦ハンドル8で走行車体15の操向操作を行うことが出来る。
即ち、本実施の形態の苗移植機1は、左右一対の前輪2、2及び左右一対の後輪3、3によって畝Uを跨いだ状態で走行車体15を進行させながら、トレイ20に収容されている苗22を畝Uの上面に自動的に植え付けることが出来る構成である。
また、図1に示す通り、左の操縦ハンドル8の根本部の左側には、植付作業を行うときの走行速度の切り替え、及び、走行モードの切り替えを行う変速レバー190が設けられている。
また、走行部には、走行車体15に対し左右一対の後輪3、3を上下動させて、走行車体15の姿勢及び車高を制御する機体制御機構500(図1参照)が設けられている。
機体制御機構500には、左右一対の後輪3の走行伝動ケース9と走行車体15との間において、後輪3の上げ下げによって走行車体15を昇降する油圧昇降シリンダ10と、走行車体15を左右傾斜させる水平用油圧シリンダ14とが設けられており、この油圧昇降シリンダ10を伸縮作動させると、左右一対の後輪3が同方向に同量だけ走行車体15に対し上下動し、走行車体15が昇降する。
また、油圧昇降シリンダ10は、ミッションケース4の上部に取り付けられた油圧切替バルブ部40(図1参照)に固着して設けられ、ミッションケース4に取り付けられた油圧ポンプからの油圧を切り替える油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)を操作することにより作動する構成である。
尚、昇降操作バルブには、後述する昇降操作レバー81(図12(a)参照)がケーブル82を介して連結されるとともに、後述するカウンタアーム760(図13参照)がロッド765を介して連結されている。
また、ミッションケース4の右側には振り子式の左右傾斜センサ41(図1参照)が設けられており、この左右傾斜センサ41の検出により油圧切替バルブ部40に備えられた水平操作バルブ(図示省略)を介して水平用油圧シリンダ14を作動させ、左側の後輪3のみを上下動させて、畝Uの谷部の凹凸に関係なく走行車体15を左右水平に維持すべく構成されている。
次に、図3、図4(a)、(b)、(c)を用いて、上述した苗植付装置300、及び苗植付装置駆動機構400について更に説明する。
図3は、苗植付装置300と苗植付装置駆動機構400の左側面図である。また、図4は、苗植付装置駆動機構400の概略左側面図である。
苗植付装置300は、図3に示す通り、苗22を圃場に植付ける植付具11と、植付具11を上下方向に揺動させるための互いに平行に配置された上アーム311と下アーム312を有する揺動リンク機構310と、下アーム312に第1連結軸321を介して回動自在に取り付けられ、揺動リンク機構310を上下動させる上下動アーム320を備えている。第1連結軸321は上下動アーム320に固定されている。
尚、上下動アーム320を回動させるための上下動アーム駆動軸440は、苗植付装置駆動機構400から突き出して設けられており、その先端部に上下動アーム320が固定されている。
更に苗植付装置300は、図3に示す通り、下アーム312に第2連結軸341を介して回動可能に取り付けられるとともに植付具11を開閉させる開閉アーム340と、第1連結軸321に固定されるとともに、第2連結軸341を中心として開閉アーム340の先端部に第3連結軸343を介して回動自在に取り付けられた開閉ローラ342の外周縁部に当接しながら回動することにより、開閉アーム340を前後方向に揺動させる開閉カム322と、一端部351が開閉アーム340の先端部の第3連結軸343に連結され、他端部352が植付具11の開閉機構11a側に連結された開閉用連結ケーブル350と、を備えている。
ここで、上述した揺動リンク機構310について更に説明する。
即ち、揺動リンク機構310は、図3に示す通り、苗植付装置駆動機構400を収納したケーシング401の前側上端部401aに、上端が上前軸313aに回動自在に支持され、下端が下前軸314aを介して回動自在に連結支持板315に連結された前揺動アーム316aと、苗植付装置駆動機構400を収納したケーシング401の後側上端部401bに、上端が上後軸313bに回動自在に支持され、下端が下後軸314bを介して回動自在に連結支持板315に連結された後揺動アーム316bとを備え、連結支持板315に設けられた上軸316に、上述した上アーム311の前端部が回動自在に連結され、且つ、連結支持板315の下後軸314bに、上述した下アーム312の前端部が回動自在に連結されているとともに、上アーム311及び下アーム312のそれぞれの後端部が、植付具11の支持板317に設けた回動上軸317aと回動下軸317bに回動自在に連結されている。
上記構成により、苗植付装置駆動機構400において上下動アーム駆動軸440に回転駆動力が伝動されると、上下動アーム駆動軸440に固定されている上下動アーム320が矢印Aの方向に回動することにより、下アーム312及び上アーム311が上下に揺動を繰り返すとともに前後への揺動も行われて、植付具11による苗22の植付動作が、畝Uに対して所定の間隔で自動的に行われる。
また、この植付動作の際、第1連結軸321が固定されている上下動アーム320が、矢印Aの方向に回動すると、第1連結軸321に固定されている開閉カム322が開閉ローラ342の外周縁部に当接しながら回動するので、開閉アーム340が第2連結軸341を中心にして前方向(反時計方向)に揺動(回動)する。その動作にともなって、開閉用連結ケーブル350の一端部351が前方向に引っ張られるので、開閉機構11aが植付具11を開くべく動作する。
また、開閉アーム340が第2連結軸341を中心にして後方向(時計方向)に揺動(回動)すると、開閉機構11aに設けられた植付具11を常に閉じる方向に付勢する付勢ばね(図示省略)の作用により、開閉用連結ケーブル350の一端部351が後方向に引っ張られるので、開閉機構11aが植付具11を閉じるべく動作する。
上記構成により、上下動アーム320の駆動が1軸のため構造がシンプルであるとともに、上下動アーム320、開閉アーム340、及び開閉カム322をコンパクトに構成でき、植付作動を円滑に行える。
次に、平面視で苗植付装置300より右側に配置(図2参照)された苗植付装置駆動機構400における上下動アーム駆動軸440への伝動の入り切りを行うクラッチ機構について、主として図4を用いて更に説明する。
苗植付装置駆動機構400は、図4に示す通り、植付伝動装置18から出力される植付作業の駆動力を植付クラッチ420に伝動するための第1ギア410と、第1ギア410からの駆動力を受けて上下動アーム駆動軸440への伝動を「入り」状態にするか「切り」状態にするかを切り替える植付クラッチ420と、植付クラッチ420が「入り」状態のときに駆動力が伝動される、植付クラッチ420の伝動軸421に対して固定されている伝動ギア421aから駆動力を受ける第2ギア430と、第2ギア430と同軸に固定された小径ギア430aと噛み合って上下動アーム駆動軸440に駆動力を伝動するための、上下動アーム駆動軸440に固定された第3ギア450とを、それぞれ回動可能に配置している。ここで、植付クラッチ420の伝動軸421は、植付クラッチ420が「切り」状態のときは、回動せずに停止しており、第2ギア430への駆動力の伝動は行わない。伝動軸421と共に回転するセンサ円盤414の回転を植付タイミングセンサ415で検出して植付クラッチ420の駆動を制御部800に入力する。
植付クラッチ420のクラッチ爪を等ピッチで複数設け、植付クラッチ420から軸440へ減速伝動する。等ピッチのクラッチ爪の数をA、上記減速比Zとすると、(A÷Z)を、走行変速装置により切り替わる植付株間の最小公倍数に設定する。
この構成で、細かい調節が出来るので、植付株間設定の自由度が向上し、走行変速装置を切り替えても、同一の植付株間を設定出来る。
植付クラッチ420の駆動側クラッチ体と一体で回転する回転板を設け、回転板の外周に植付クラッチのクラッチ爪の位相に合わせて複数の凹凸を設け、この凹凸を植付タイミングセンサ415が検出すると、ソレノイド470を作動させて植付クラッチ420を入にして、植付具11の作動を開始する。
この構成で、植付クラッチ420の駆動側クラッチ体と従動側クラッチ体とのクラッチ爪が即座に合致する位相で植付クラッチ420を入に出来て、植付株間が正確になる。また、クラッチ爪の位相に合わせて前記複数の凹凸を設けたので、細かい調節が出来て植付株間設定の自由度が向上する。
尚、本実施の形態の植付クラッチ420として、従来の定位置停止クラッチを使用しても良い。
また、苗植付装置駆動機構400は、図4に示す通り、植付クラッチ420の伝動下流側に設けられ上下動アーム駆動軸440に固定されるとともに、植付クラッチ420を「入り」状態から「切り」状態に強制的に切り替えるために円形状の外周縁部の一部に形成された凹部441aを有する間欠用カム441と、一端部460aが植付クラッチ420から離れるか又は当接するかによって、当該植付クラッチ420におけるクラッチの入り状態と切り状態の切り替えを行わせる、回動支点461にて回動自在に支持された側面視で略「へ」の字形状の第1アーム460と第2アーム462を備えている。
また、苗植付装置駆動機構400は、図4に示す通り、引っ張りばね480の引っ張り力に対抗して第1アーム460の他端部460bを可動プレート472を介して矢印Bの方向に吸引することで、回動支点461を中心として第1アーム460の一端部460aを矢印C方向に回動させて、植付クラッチ420を「切り」状態から「入り」状態へ切り替える動作を行わせるソレノイド470を備え、ソレノイド470の吸引力が植付クラッチ420の「入り」状態への切り替え動作に有効に作用すべく、ソレノイド470の取り付け位置の調節可能な取り付け調整用長孔471aが設けられているとともに、ケーシング401の下方位置に固定されたソレノイド固定板471と、第1アーム460の回動支点461に一端部462aが固定され、第1アーム460の動作と連動して他端部462bが間欠用カム441の外周縁部に当接する第2アーム462と、を備えている。
また、上述した引っ張りばね480は、第1アーム460を植付クラッチ420が「切り」状態となる方向に、且つ、第2アーム462の他端部462bを間欠用カム441の外周縁部に押し付ける方向に付勢するためのばねである。
植付伝動装置18から取出装置200への伝動機構を構成するフレームには予備苗台115を支持する。
次に、図5、図6を用いて、上述した変速レバー190を中心に更に説明する。
図5は、変速レバー190の斜視図であり、図6はミッションケース4の変速ギア機構を説明する概略断面図である。
変速レバー190は、図5に示す通り、「前進」走行、「中立(停止)」、及び「後進」走行の3つの走行モードの切り替えと、植付作業を行うときの走行速度を低く設定する「植付1」と、走行速度を高く設定する「植付2」の切り替えを行う為のレバーであり、作業者が手動で回動出来る構成になっている。
また、変速レバー190の先端部、即ち、作業者が手で握る部分であるノブ192と反対側の変速レバー端部191は、ミッションケース4の変速ギア機構の一端に連結されている。
変速ギア機構は、シャフト193にスライド移動可能に保持された大小一対のギア194と、シャフト193に平行にスライド可能に配置され、一端側196aがミッションケース4の外に突き出しており、他端側に5つの貫通孔196bが形成されており、大小一対のギア194をスライド移動させるギアシフトプレート195が途中に固定された棒状の変速用シフタ196と、貫通孔196bの開口部にばね196cで押圧されて配置されたスチールボール196dとを備え、変速用シフタ196の一端側196aには、変速用シフタ196が変速レバー190の回動動作に連動して軸方向にシフト移動可能な構成とすべく、変速レバー端部191に固定され、その変速レバー端部191の回動軸に直交する方向に突き出した連結板197の先端部197aに連結されている。
また、連結板197の根本部には突起部197bが形成されている。そして、変速レバー190による植付作業を行うときの走行速度の切り替えを検知するために当該突起部197bの近傍に配置された第1変速スイッチ198と第2変速スイッチ199のそれぞれのスイッチ可動プレート198a、199aを、その突起部197bが、変速レバー190の回動位置に応じて、押圧したり、押圧しなかったり出来る構成である。
即ち、変速レバー190が、低速の走行速度で植付作業を行う「植付1」に切り替えられた場合、第1変速スイッチ198がONし、且つ、第2変速スイッチ199がOFFしている。
一方、変速レバー190が、高速の走行速度で植付作業を行う「植付2」に切り替えられた場合、第1変速スイッチ198がOFFし、且つ、第2変速スイッチ199がONしている。
また、変速レバー190が、「中立(停止)」モードの位置に切り替えられた場合、第1変速スイッチ198がOFFし、且つ、第2変速スイッチ199がONしている。
また、変速レバー190が、「前進」モード、及び、「後進」モードの何れに設定されても、第1変速スイッチ198がOFFし、且つ、第2変速スイッチ199がOFFしている。
何れの場合でも、それぞれのスイッチからON情報、又はOFF情報を制御部800に送る構成である為、制御部800は、変速レバー190により、「植付1」が設定されているのか、「植付2」が設定されているのか、それとも「中立(停止)」モードが設定されているのかを判定することが出来る(図14参照)。
本実施の形態において、変速レバー190が「中立(停止)」モードに設定されていることを、制御部800に判定させる構成としたことにより、走行車体15が走行を停止しているときに、制御部800からソレノイド470に通電指令を出して、植付クラッチ420を「入り」状態として、植付具11を作動させることが可能となり、中立モードで、植付具11の伝動確認が出来るという効果を発揮する。
尚、制御部800による上記判定結果の、植付株間の制御等への活用については更に後述する。
また、図6に示された、連結板197と大小一対のギア194の位置は、変速レバー190が「前進」走行のモードに設定されている場合と、「後進」走行のモードに設定されている場合の、両方の場合について、それぞれ実線で描いた。
以上の構成により、変速レバー190が、図5に示した「前進」から「中立」、「植付1」、「植付2」、「後進」の5つの内の何れのモードに設定されるのかに応じて、変速用シフタ196が軸方向にスライド移動することで、大小一対のギア194がスライド移動して、連結相手となるギア(図示省略)が変更される。
次に、トレイ供給装置について説明する。トレイ供給装置100は、内部構成の透視側面図を図7に示すように、整列配置のポット群を一体に形成したトレイ20を載せて傾斜案内するための苗置台110と、この苗置台110から受けたトレイ20を下方に屈曲させて苗置台110の下側に反転案内するための外ガイド213と、この外ガイド213から排出されたトレイ20を収容するトレイ受け214と、外ガイド213に沿ってトレイ20をその裏面側から所定距離づつ送り移動させる送り具215と、この送り具215に作用する周回動作可能な牽制ローラ216とから構成される。
この牽制ローラ216は、横移動軸105によって左右移動可能に支持したトレイ供給装置100が、その左右側端位置に達した位置で送り具215に作用可能に構成する。
送り具215は、その要部拡大側面図を図8に示すように、トレイ20の裏面側のポット間溝部Dに係合可能な送りロッド221と、この送りロッド221を揺動可能に支持する送りアーム222と、送りロッド221と連結する中継リンク223とを備える。
送りロッド221は、コ字状に屈曲した形状で、トレイ20の裏面側のポット間溝部Dに進入可能な左右一直線状に延びる進入部分221aを先端部に備え、また、基端部には支軸221bを設けて送りアーム222の先端部に軸支するとともに、基端アーム221cを設けて揺動可能に中継リンク223と連結することにより、トレイ20のポット間溝部Dに対して進入部分221aが進退可能に構成する。支軸221bには、進入用の付勢具としてトルク・スプリング224を設けて進入部分221aが、トレイを潰すことなく、トレイ20のポット間溝部Dに進入する方向に付勢する。また、必要により、進入部分221aをポット間溝部Dから強制退避させるレバー225を送りロッド221に設ける。なお、進入部分221aは、トレイ20の左右幅にわたって設けられている。
送りアーム222は、基端部に支軸222aを設けて先端部の送りロッド221の送り動作範囲で揺動可能に軸支するとともに、送りロッド221を送り位置から復行動作させる歩進制御カム222bを設ける。この歩進制御カム222bは、牽制ローラ216の作用を受けてトレイ20の育苗ポット21の長さを超える範囲で送りロッド221を復行可能に形成する。また、送りアーム222に送り用の付勢具としてスプリング226を設けて送りロッド221の送り方向に付勢するとともに、進入部分221aの直上の育苗ポット21の送り位置を取出し位置に合わせるために、送り動作の限度位置設定用のストッパ227を設ける。
中継リンク223は、先端部に形成した長孔連結部223aによって送りロッド221の基端アーム221cと揺動可能に連結し、また、基端部を送りアーム222の支軸222aに軸支するとともに、送りロッド221を揺動制御して進入部分221aをトレイ20から退避動作させる係合制御カム223cを設ける。この係合制御カム223cは、牽制ローラ216の作用に応じて進入部分221aがポット間溝部Dから退避可能に形成する。
送りアーム222の歩進制御カム222bおよび中継リンク223の係合制御カム223bの相互関係は、ポット間溝部Dから進入部分221aがまっすぐ抜けるように、係合制御カム223bにより、中継リンク223を介して送りロッド221の進入部分221aをポット間溝部Dから退避させつつ、歩進制御カム222bにより、送りアーム222を僅かに復行動作させ、さらに隣接の育苗ポット211まで進入部分221aを移動させる範囲で牽制ローラ216が作用するように両カムの外形を構成する。
図8(b)に示す如く、送りロッド221のポット間溝部Dに進入する進入部分221aの外に向けて横切刃30を設け、この横切刃30と直交して各育苗ポット21の横溝部に進入する多数の縦切刃31設けて、進入部分221aがポット間溝部Dに進入する際に各育苗ポット21から伸びて絡まった細かい根を切り離すようにしている。
育苗ポット21の横間隔が違うトレイ20を使う場合には、育苗ポット21の横ピッチに合わせた縦切刃31を設けた送りロッド221に付け替えて使用する。
なお、図示を省略するが、苗置台110の上面に各ポット間溝部Dに進入する縦切刃31を設けた帯鉄を取り付ける構成で、育苗ポット21から底部に伸びた細かい根を切り離すことも出来る。
図示を省略するが、取出爪210が苗22を取り出す育苗ポット21の一つ上側の育苗ポット21を左右から挟んで苗22の存在を検出する苗センサを設けて、作業者に欠株をブザーや警告灯で知らせるようにすると良い。
また、取出爪210が苗22を取り出す育苗ポット21の一つ上側の育苗ポット21の苗22をスポンジ状のローラで上に押えるローラを設け、このローラは育苗ポット21が取出し位置に降りてくると苗22を放して元に戻すようにすると、取出爪210が余分の苗22を取出さないように出来る。
次に、上記構成のトレイ供給装置100の作動について説明すると、トレイ供給装置100は、牽制ローラ216が送りアーム222の歩進制御カム222bおよび中継リンク223の係合制御カム223bに共通に作用することにより、係合制御カム223bが中継リンク223を介して送りロッド221の進入部分221aを取出し位置にある育苗ポット21の直下のポット間溝部Dから退避させつつ、歩進制御カム222bにより送りアーム222が僅かに復行動作してポット間溝部Dから進入部分221aがまっすぐ抜け、これに続く送りアーム222の復行動作により隣接の育苗ポット211まで進入部分221aが移動する。
さらに牽制ローラ216が周回して係合制御カム223bおよび歩進制御カム222bが解放されると、トルク・スプリング224の付勢力によってトレイ20の裏面側から送りロッド221の進入部分221aが隣接の育苗ポット21を押圧し、次いで、スプリング226の付勢力によって送りアーム222がストッパ227の規制位置まで揺動する過程で隣接の育苗ポット21の直下のポット間溝部Dに進入することによって隣接の育苗ポット21が取出し位置に位置決めされることにより、1ピッチ分の距離をトレイ20が送り移動される。
トレイ20が送り移動されると、取出装置200が作動して移植株を取出す。この取出動作は、トレイ20の表面側から移植株の主軸を避けて育苗ポット21の下半位置に取出爪210を作用することから、この作用点の直近位置である直下のポット間溝部Dを進入部分221aによって位置決めすることにより、取出爪210の作用点について高精度の位置合せが可能となる。また、ポット間溝部Dに進入部分221aを係合した状態で取出装置200を作動することにより、進入部分221aによってトレイ20が拘束されることから、位置ずれを招くことなく、育苗ポット21から移植株を取出すことができる。
取出装置200の作動のタイミングについては、牽制ローラ216の周回回転数を取出装置200の動作回転数の1/2以下とすることにより、トレイ20の送り動作時間が180度未満で取出装置200の取出し周期より短かくなることから、横移動軸105による横移動速度が小さくなる左右側端位置において、牽制ローラ216が送り具215に作用するタイミングの誤差があっても、トレイ20からの取出し動作までにトレイ20の確実な送り動作が可能となり、取出装置200が移植株を植付装置5に渡すことにより、移植株が圃場に植付けられる。
このように、トレイ供給装置100は、上記トレイ20の裏面側に形成されているポット間溝部Dに係合して所定位置まで送り動作する送り具215を備えることから、取出装置200がトレイ供給装置100から移植株を順次取出して植付装置5に受渡すことにより移植株の植付けを行い、このとき、トレイ供給装置100の送り具215がトレイ20の裏面のポット間溝部Dに係合して所定の位置まで送り動作することから、ポット単位のトレイ送りによって送り精度が確保され、固定配置の取出装置200によって移植株を確実に取出して植付装置5に受渡すことが可能となる。
次に、主として図9、図10を用いて、本実施の形態の苗移植装置1に設けられた取出装置200の構成を中心に説明する。
図9は、取出装置200の概略斜視図であり、図10と図11は、図9の紙面の左上奥側から右下手前側を見た、取出装置200の概略側面図である。
図9、図10に示す通り、取出装置200は、苗移植機1の本体に固定された取出装置固定部材201に回動可能に保持されて、チェーンベルト202を介して本体側の駆動源の動力で矢印B方向に回動する駆動軸203により同方向に回動する駆動アーム220と、駆動アーム220の先端側部220aに、一端部230aが回動自在に連結された連結アーム230と、取出装置固定部材201に固定ピン201a、201bによって保持され、外形が略アルファベットのJ文字の形状を呈した板状部材であって、トレイ供給装置100に近い側が直線状であり遠い側が略R状に立ち上がった形状を呈した案内溝241を有する案内部240と、を備えている。
また、取出装置200は、案内溝241に対してがたつくことなく且つスムーズにスライド移動可能に挿入された、後述するカム軸271と一体である第1の被案内部材245と、第2の被案内部材247とが連結され、それら被案内部材が連結された側面の一端側から突き出して略直角に折り曲げられた折り曲げ部251を有する基板250と、基板250の折り曲げ部251から垂直に突き出して、回動自在に保持された左右一対の取出爪保持ピン252L、252R、根元部がそれぞれ左右一対の取出爪保持ピン252L、252Rに取付られ、先端部の幅がピンセット状に細くなっている、育苗ポット21内の苗22を取り出す一対の取出爪261L、261Rと、一対の取出爪261L、261Rの対向する内面部の根元部側にその両端が取り付けられた引っ張りバネ263とを有する取出部材260と、を備えている。
また、取出装置200は、基板250に回動自在に貫通した、上記第1の被案内部材254と一体であるカム軸271を有したカム270であって、そのカム270の外周部の厚みに関して、上記一対の取出爪261L、261Rの内面部に設けられた左右一対の爪先端幅規制突起262L、262Rの先端面と接触する際、その外周部の場所によって厚みが変化している外周部272と、そのカム270の最外縁部のカム軸271の軸中心からの距離(外径ともいう)に関して、その最外縁部の場所によってその外径が変化している最外縁部273を備えたカム270と、基板250に回動自在に連結され、カム270の最外縁部273の外径の変化により、一対の取出爪261L、261Rに沿って、育苗ポット21から取り出して一対の取出爪261L、261Rで保持されている苗22を押し出す押出機構280と、を備えている。
また、カム軸271と一体である第1の被案内部材245の先端近傍縁部245aは、連結アーム230の他端部230bに回動可能に連結されている。また、カム軸271と一体である第1の被案内部材245は、駆動アーム220の回転力によって、第1ギア291、第2ギア292、第3ギア293から構成された伝達機構290を介して回動させられ、駆動アーム220の駆動周期に合わせてカム軸271へ駆動力を伝達する構成である。
また、カム270の外周部272が、一対の取出爪261L、261Rの内面側に設けられた左右一対の爪先端幅規制突起262L、262Rの先端面と接触する際、カム270の外周部272の厚みの変化と、引っ張りバネ263の復元力との相互作用により、一対の取出爪261L、261Rを開閉させる構成である。
次に、上記伝達機構290について更に説明する。
即ち、第1ギア291は、駆動アーム220の先端側部220aに固定されており、連結アーム230に対しては、第1回動軸291aを介して回動自在に取り付けられている。また、第3ギア293は、カム軸271と一体である第1の被案内部材245の先端部245bに固定されており、第1の被案内部材245の先端近傍縁部245aが、連結アーム230の他端部230bに回動可能に連結されているため、第3ギア293は、連結アーム230に対して回動自在に保持されている。従って、第3ギア293は、第1の被案内部材245と一体で回動する。また、第2ギア292は、連結アーム230の中央位置において回動自在に取り付けられており、第1ギア291及び第3ギア293の両方に挟まれて、双方のギアと嵌合している。
次に、上記押出機構280について、主として図10を参照しながら更に説明する。
押出機構280は、一対の取出爪261L、261Rで保持されている苗22を押し出す、先端部281aが直角に折り曲げられ取出爪261L、261Rの先端部の幅に合わせた切欠部281bが形成された押出ロッド281と、略直角状に折り曲げられた連結棒282であって、その一方の先端部282aが押出ロッド281の後端部に設けられた後端孔部281cに回動自在に挿入されて、抜け防止のワリピン(図示省略)で保持された連結棒282と、連結棒282の他方の先端部282bが上端部283aに固定され、下端部283bが基板250に対して押出アーム連結軸283dにより回動自在に取付られ、中央部の引っ張りバネ保持用第1突起283cが設けられた押出アーム283と、一端が引っ張りバネ保持用第1突起283cに引っ掛けられ、他端が基板250に固定された引っ張りバネ保持用第2突起250aに引っ掛けられた押出アーム引っ張りバネ284と、を備えている。
そして、カム270が矢印B方向に回動した際、最外縁部273の内で他の部分273aより外径が大きい突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図10において反時計方向に回動さられて、連結棒282で連結された押出ロッド281が後退する構成である(矢印C参照)。
また、カム270が矢印B方向に回動した際、最外縁部273の内で突出部273bより外径が小さい他の部分273aが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284が縮まり、押出アーム283は、図10において時計方向に回動さられて、連結棒282で連結された押出ロッド281が突き出てくる構成である(矢印D参照)。押出ロッド281が突き出してくる度に、押出ロッド281の先端部281aに設けられた切欠部281bを、一対の取出爪261L、261Rの先端部が通過することになるので、その先端部に付着していた土等が取り除かれる構成である。
ここで、押出ロッド281は、上部が平面状に構成されているが、これにより、一対の取出爪261L、261Rに苗22の葉がからむのを防止出来る。
以上の構成において、次に、図9〜図11を参照しながら、取出装置200の動作を説明する。
上述した通り、案内部240は、苗移植機1の本体に固定された取出装置固定部材201にしっかりと固定されているため動かない。
駆動アーム220の回動に伴って、連結アーム230が揺動するが、その動きは、案内部240に形成された案内溝241を貫通して基板250に連結されている第1の被案内部材245により規制される。
一方、連結アーム230の動きに伴って、基板250も揺動するが、基板250は、第1の被案内部材245の他に、第2の被案内部材247が、案内溝241を貫通している為(但し、第2の被案内部材247は連結アーム230には連結されていない)、その動きは、案内溝241に沿った往復移動を繰り返す。基板250には、取出部材260が取り付けられている為、取出部材260も基板250と同様の動きをし、一対の取出爪261L、261Rの先端部261Lp、261Rpは、図10、図11に示す軌跡Kを描く。
ここで、図11は、駆動アーム220の回動の位置と、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置との概略の対応関係を示す模式図である。図11に示す、駆動アーム220の回動の位置P1〜P6は、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置K1〜K6に対応する。尚、軌跡Kを示す破線上に記載した矢印は、動作方向を示している。
図11に示す通り、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K1から位置K2に向かう動作は、育苗ポット21から苗22を抜き取る動作に対応している。位置K1から位置K2までの軌跡Kが直線状になっていることから、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21から真っ直ぐに後退する。この時、一対の取出爪261L、261Rの先端部261Lp、261Rpには、引っ張りバネ263の復元力により、互いに近づく方向の力が作用しており、育苗ポット21から抜き取った苗22を保持することが出来る。尚、一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作については、押出ロッド281の動作と合わせて、更に後述する。
尚、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K6から位置K1に向かう動作は、苗取出位置にあるトレイ20の育苗ポット21内の苗22に対して、一対の取出爪261L、261Rを挿入させる動作に対応しており、位置K1から位置K2に向かう軌跡Kとほぼ同じ経路を逆向きに移動するので、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21にほぼ真っ直ぐに挿入される。この時、一対の取出爪261L、261Rの先端部261Lp、261Rpには、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用しており、双方の先端部が開いた状態で、育苗ポット21に進入出来る。
これにより、一対の取出爪261L、261Rの先端部261Lp、261Rpが、トレイ20、育苗ポット21、及び苗自体を傷付けることが無い。
尚、位置K1から位置K2までの軌跡K、及び、位置K6から位置K1までの軌跡Kが、概ね直線状になっているのは、案内溝241のトレイ供給装置100に近い側が直線状に形成されている為である。
次に、位置K2から位置K3に向かうに従って、一対の取出爪261L、261Rの先端部261Lp、261Rpは、それまで育苗ポット21に対向していた姿勢から略下方に向けて急激に姿勢を変化させ、位置K4まで移動した時には、先端部261Lp、261Rpは、ほぼ真下を向いている。
尚、この様に、略下方に向けて急激に姿勢を変化させるのは、案内溝241のトレイ供給装置100から遠い側が、略R状に立ち上がった形状に形成されている為である。
そして、丁度その時、その先端部261Lp、261Rpの下方には、上死点に向けて軌跡T1(図1参照)上の上昇工程にある植付装置7の苗投入口(図示省略)が上方に向いており、位置K4から位置K5の間において、押出ロッド281により一対の取出爪261L、261Rの先端部261Lp、261Rpから押し出された苗22が、植付装置7の苗投入口に落下し、植付具11へ供給される。尚、押出ロッド281の動作については、更に後述する。
次に、位置K5から位置K6に向かうに従って、一対の取出爪261L、261Rの先端部261Lp、261Rpは、それまで略下方に向けていた姿勢を次の育苗ポット21に対向出来る様に急激に姿勢を変化させて、位置K1まで移動した時には、先端部261Lp、261Rpは、新たな育苗ポット21に挿入されている。
図11に示す、駆動アーム220の回動の位置と、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置との概略の対応関係から分かる様に、位置K4から位置K5に向かう動作は、上述した位置K1から位置K2に向かう動作に比べてゆっくり行われるので、育苗ポット21からの苗22の取出は素早く行えて、且つ植付装置7への苗22の放出を確実に行える。
この様な動作が行われるのは、連結アーム230が、駆動アーム220より前方(トレイ供給装置100の抜き取り位置)側に設けられているためである。また、駆動アーム220が、連結アーム230に比べて、トレイ供給装置100の抜き取り位置から遠い為、苗22を取り出す時に苗22に接触することが無く、邪魔にならない。
次に、主として図9、図10、図11を参照しながら伝達機構290と押出機構280の動作を中心に説明する。
図9に示す通り、駆動アーム220のB方向への回動により、駆動アーム220の先端側部220aに固定された第1ギア291は、駆動アーム220の回動支点220bを中心としてB方向へ公転する。第1ギア291は、連結アーム230に対して第1回動軸291aを介して回動自在に取り付けられており、第2ギア292を介して、第3ギア293をB方向に回動させる。第3ギア293は、カム軸271と一体である第1の被案内部材245の先端部245bと固定されており、且つ、第1の被案内部材245の先端近傍縁部245aが、連結アーム230の他端部230bに回動可能に連結されているため、第3ギア293の回動により、カム軸271を介して、カム270がB方向に回動する。即ち、駆動アーム220の駆動周期に合わせてカム270が回動する。
カム270は、場所によって厚みが変化している外周部272と、場所によってカム軸271の軸中心からの距離(外径)が変化している最外縁部273を有しており、図10に示す通り、最外縁部273の内で突出部273bは、他の部分273aより外径が大きく、カム軸271の軸中心から同じ距離にある外周部272の内で第1の範囲272aの厚みは、残りの肉厚部分である第2の範囲272bの厚みに比べて薄く設定されている。
以上の構成のもとで、駆動アーム220の駆動周期に同期してカム270が回動する際、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K6から位置K1に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、カム270の外周部272の内、肉厚部分である第2の範囲272bが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用しており、双方の先端部が開いた状態である。
一方、この時、カム270の最外縁部273の内、突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触していることにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図10において反時計方向に回動して(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態を維持する。
よって、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21に進入して、苗を取り出すことが出来る。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K1から位置K2に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、位置K1から位置K2に向かう動作を開始すると同時に、カム270の外周部272の内、肉薄部分である第1の範囲272aが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力により、互いに近づく方向に移動するので、双方の先端部が閉じた状態になる。
一方、この時、カム270の最外縁部273の内、突出部273bが、依然として引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触していることにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図10において反時計方向に回動した状態を維持しており(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態を維持している。よって、一対の取出爪261L、261Rの先端部261Lp、261Rpは、取り出した苗22を先端部にしっかりと保持することが出来、そのまま、植付装置7側へ移動して行く。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K4から位置K5に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、位置K4から位置K5に向かう動作を開始すると同時に、カム270の最外縁部273の内、突出部273bに代わり他の部分273aが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284の復元力で、押出アーム283は、瞬時に、図10において時計方向に回動した状態となり(矢印D参照)、連結棒282で連結された押出ロッド281が押し出されると同時に、押出ロッド281の先端部281aの切欠部281bが、一対の取出爪261L、261Rの先端部を押し広げながら移動する。
これにより、押出ロッド281の先端部281aにより一対の取出爪261L、261Rの先端部261Lp、261Rpから押し出された苗22が、植付装置7の苗投入口に落下し、植付具11へ供給される。この時、押出ロッド281の先端部281aの切欠部281bが、一対の取出爪261L、261Rの先端部を押し広げながら移動することになるので、その先端部に付着していた土等が同時に取り除かれる。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K5から位置K6に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、カム270の外周部272の内、肉薄部分である第1の範囲272aに代わり肉厚部分である第2の範囲272bが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用して、双方の先端部が開いた状態に変化する。
一方、位置K6の近傍に来た時、カム270の最外縁部273の内、他の部分273aに代わり突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図10において反時計方向に回動さられて(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態に変化する。
尚、上記実施の形態では、一対の取出爪261L、261Rを根元部から先端部に亘、一体もので同一の金属製の板部材で構成されている場合について説明したが、これに限らずの先端側について、取り外しが可能で弾性を有した例えばゴム板や、樹脂板で構成されていても良い。これにより、引っ張りバネ263の復元力で先端部が苗22をつかんでも、先端側の弾性によりゴム板の方が変形するので、苗22を潰さないという効果を発揮する。
また、押出ロッド281は、一対の取出爪261L、261Rの先端部261Lp、261Rpが位置K6の近傍に移動するまでは、一対の取出爪261L、261Rの先端部261Lp、261Rpの上方を覆う様に構成されているが、これにより、位置K5から位置K6に移動する際に、トレイ20上の苗22の葉が一対の取出爪261L、261Rの先端部261Lp、261Rpに引っ掛かるのを防止出来る。
また、押出ロッド281は、一対の取出爪261L、261Rの先端部261Lp、261Rpが、育苗ポット21に挿入される時の挿入速度に合わせて、後退させる構成としており、これにより、苗22の葉が端部261Lp、261Rpに絡まるのを防止出来る。
次に、図12(a)を参照しながら、操縦ハンドル8の左右一対のハンドルグリップ8L、8Rの近傍に配置された各種操作レバー、及び操作部600について説明する。図12(a)は、操縦ハンドル8の左右一対のハンドルグリップ8L、8Rの近傍に配置された各種操作レバー、及び操作部600を説明する平面図である。
図12(a)に示す通り、操縦ハンドル8の左側のハンドルグリップ8Lの近傍には、主クラッチレバー80が設けられ、右側のハンドルグリップ8Rの近傍には、走行車体15を昇降する油圧昇降シリンダ10を作動させる昇降操作レバー81が設けられている。
図12(b)は、主クラッチレバー80の別実施例で、主クラッチレバー80を変速溝83で前後に回動して主クラッチのオン・オフを切り換え、該主クラッチレバー80に左右回動可能に変速アーム84を設け、この変速アーム84の回動位置をセンサで検出してミッションケース4内のギヤ変速段を電動で変速する。変速アーム84の下側には変速位置表示盤昇降操作レバー81は、「下げ」、「中立」、「上げ」の3段階に手動切り替え可能に構成されており、「下げ」位置に切り替えると、油圧昇降シリンダ10が走行車体15を下降させるべく作動し、後述するセンサ板710(図13参照)により下降が停止されると共に、後述する植付入り切りボタン620(図12(a)参照)がON状態であれば、植付クラッチ420が「入り」状態となり、植付作業が開始される。
また、昇降操作レバー81を「中立」位置に切り替えると、植付作業を停止させ、「上げ」位置に切り替えると、油圧昇降シリンダ10が走行車体15を上昇させるべく作動する。
また、図12(a)に示す通り、操作パネル601には、その左端から右端に向けて順に、(1)走行車体15の走行を停止させた状態で植付具11のみ作動させるための空植操作ボタン610と、(2)昇降操作レバー81が、走行車体15を下降させる下降操作位置に操作された際、その下降操作に連動して植付具11を作動させる状態と、その下降操作に連動させない状態との何れかに切り替える植付入り切りボタン620と、(3)少なくとも植付株間を表示する表示部630と、(4)少なくとも植付株間を調節する調節ボタン640と、が配置されている。
尚、植付入り切りボタン620は空植操作ボタン610と電気的には直列に繋がっているので、空植操作ボタン610をON操作する際には、植付入り切りボタン620もON操作することにより、植付具11が作動する。
ここで、表示部630について更に説明する。
本実施の形態の苗移植機1では、変速レバー190により、低速走行による植付作業を行う「植付1」が指定されるか、それとも、高速走行による植付作業を行う「植付2」が指定されるかに応じて、表示部630に表示可能な植付株間の範囲を異ならせている。
具体的には、変速レバー190を「植付1(低速走行)」に設定したときは、作業者が設定可能な植付株間の範囲は、22cm〜40cmであり、変速レバー190を「植付2(高速走行)」に設定したときは、作業者が設定可能な植付株間の範囲は、32cm〜70cmであることが、制御部800のメモリ部810に予め初期設定されている。これら初期設定値は、それぞれ変更可能に構成されている。例えば、「植付1」と「植付2」の速度比を変更した場合、操作部600において、植付株間の範囲を変更するモードに切り替えた後、調節ボタン640を用いて、植付株間の範囲をそれぞれ独立して変更設定出来る構成である。
本実施の形態では、変速レバー190が「植付1」と「植付2」の何れに設定されているかを第1変速スイッチ198と第2変速スイッチ199からの出力信号に応じて判定した制御部800(図14参照)は、表示部630に対してその判定結果に対応した指令を出す。これにより、作業者が設定可能な植付株間の範囲が表示される。
即ち、表示部630の左半分の領域に、作業者が設定可能な植付株間の範囲である上限と下限が同時に表示され、且つ、右半分の領域に、植付株間のセンター値を仮の値として表示する構成である。
作業者は、表示部630の左半分の表示領域に表示された植付株間の範囲内において、表示部630の右半分の表示領域に表示されている仮の値を、所望の株間に変更すべく、調節ボタン640を操作する。
こうして作業者により設定された植付株間を実現する為に、制御部800は、((i)調整ボタン640により設定された植付株間の数値情報と、((ii)変速レバー190により「植付1」と「植付2」の何れが設定されたかを判定する為の、第1変速スイッチ198と第2変速スイッチ199からのON信号の有無と、を利用して、植付クラッチ420を「入り」状態にする為の、ソレノイド470の作動周期を決定し、その決定した作動周期に従って、ソレノイド470を通電させる。
これにより、変速レバー190により指定された走行速度(「植付1(低速)」、「植付2(高速)」)に対応した、植付株間の範囲が表示可能な表示部630を利用することで、指定された走行速度に対応した植付株間の範囲内で、作業者は適正な植付株間を設定することが出来る。
例えば、走行速度を遅いモードに設定した時は、狭い植付株間で植え付けることになる。その為、植付具の作動速度が極端に速くならないので、植付精度の向上を図ることができる。また、走行速度を速いモードに設定した時は、広い植付株間で植え付けることになる。その為、作業能率を向上させることができる。
つまり、本実施の形態の苗移植機1によれば、例えば、狭い植付株間で植え付けたいときは、走行速度を遅くし植付具の作動速度が極端に速くならないようにして、植付精度の向上を図ることができ、広い植付株間で植え付けたいときは、走行速度を速くして作業能率を向上させることができる。
また、圃場や走行速度等の作業条件に対応して、適正な植付株間に設定出来る。
即ち、例えば、傾斜地において植付作業を行う場合、上り傾斜面と下り傾斜面で、同じ植付株間を実現するためには、走行車体15のスリップを考慮した植付株間の設定が必要となる。本実施の形態では、「植付1」と「植付2」で、双方に対応する植付株間の範囲において、重複した範囲を設定したことにより、上り傾斜面と下り傾斜面で、同じ植付株間を実現することが可能となる。
具体的には、本実施の形態では、重複した植付株間の範囲は、32cm〜40cmである。そこで、上り傾斜面では、スリップを考慮して、変速レバー190を、高速走行が可能な「植付2(高速)」に設定して、植付株間を33cmに設定する。
一方、下り傾斜面では、スリップを考慮して、変速レバー190を、低速走行が可能な「植付1(低速)」に設定して、植付株間を30cmに設定する。
これにより、実際の植付株間は、上り傾斜面で31.5cm、下り傾斜面で31.5cmが実現出来る。
また、「植付1」と「植付2」とで、植付株間の調節範囲を異ならせることにより、傾斜地の上り下りに対応することの他、広い株間で植え付けるときは走行速度を速くして作業能率を向上させる効果もある。
ここで、再び、操作パネル601の説明に戻る。即ち、上記構成により、植付入り切りボタン620が、操作パネル601の中央部付近に配置されているので、操作がし易い。
また、空植操作ボタン610が、他の操作ボタンが配置された上面601aとは異なる後面601bの左側に配置されているので、作業者による誤操作を低減することが出来る。
また、表示部630が、操作パネル601の中央付近に配置されているため、確認し易い。
調整ボタン640は、上側に株間を広げる方向に変化させる「上げ」プッシュスイッチ640aと、下側に株間を狭める方向に変化させる「下げ」プッシュスイッチ640bとを備えている。
上記構成により、「上げ」プッシュスイッチ640a、「下げ」プッシュスイッチ640bを操作することで、株間を示す数値がダイレクトに表示部630に表示されるので、作業者が株間を認識し易い。
次に、主として図13、図14を参照しながら、植付深さ調整機構700と、植付入り切りボタン620と、昇降操作レバー81等の操作に基づいて、植付の入り切りを行うソレノイド470やチェーンベルト202の変速を行う変速モータ204等の動作を制御する制御部800を中心に説明する。
図13は、植付深さ調整機構700の概略構成を示す左側面図であり、図14は、制御部800への入出力を説明する概略ブロック図である。
図13に示す通り、植付深さ調整機構700は、
(1)圃場面701に接することで苗の植付深さを一定に保持する、底面が緩やかに湾曲したセンサ板710と、
(2)側面視で略L字形状の板状部材であって、L字の屈曲部が回動支持軸721により走行車体15に対して回動可能に支持され、後方に延びる一端部722がセンサ板710の前端部711と回動支持軸722aを介して回動自在に連結されると共に、上方に延びる他端部723が、作業者が手動で操作してセンサ板710の垂直(上下)方向の位置を設定する深さレバー730の動きを伝達する伝達ロッド740の先端部741と回動自在に連結された深さアーム720と、
(3)深さアーム720を主フレーム17から揺動自在に吊り下げるスプリング750と、
(4)側面視で略L字形状の板状部材であって、L字の屈曲部が回動支持軸761により走行車体15に対して回動可能に支持され、回動支持軸761の下部に長孔762が形成されていると共に、上端部763に連結された引っ張りスプリング766により、回動支持軸761を軸芯として矢印Y方向に回動すべく付勢され、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に対して、前端部764がロッド765で連結されたカウンタアーム760と、
(5)カウンタアーム760の長孔762の前端側に入り切り検知レバー771が位置すべく、カウンタアーム760上に配置された植付スイッチ770と、(6)一端部781に設けられた連結ピン781aが長孔762内に挿入され、他端部782が連結軸783を介してセンサ板710の上端部712と回動自在に連結されたセンサロッド780と、を備えている。
また、センサロッド780が、センサ板710の上方向への揺動によるセンサ板710の上端部712の矢印Z方向の揺動に連動することで、その一端部781の前端縁部781bが、入り切り検知レバー771を押す方向に移動し、植付スイッチ770をONさせる構成である。
上記構成によれば、深さアーム720がスプリング750で吊り下げされているので、深さアーム720と深さレバー730の連結部分のガタツキを無くし、深さレバー730により設定された深さが安定する。尚、スプリング750は、深さアーム720を吊り下げる構成であるが、これに限らず例えば、深さアーム720を主フレーム側に押し付ける構成であっても良い。
また、上記構成によれば、カウンタアーム760は、センサ板710を押し下げる方向に引っ張りスプリング766で引っ張られているので、センサロッド780とカウンタアーム760によるガタツキを無くすことが出来る。
また、引っ張りスプリング766の弾性力を変えることで、センサ板710を押す力を変えることが出来る。
なお、センサ板710は圃場面701に接して畝の高さを検出するが、図15に示す如く、センサ板710の代わりに接地ローラ47として、この接地ローラ47の支持軸46を機体支持部45に昇降可能に支持し、この機体支持部45に設けるポテンショセンサで接地ローラ47の高さを検出して制御部800に入力するようにしても良い。また、支持軸46に目盛りを刻んでその目盛りを目視して高さを確認できるようにしたり、支持軸46の支持部49に接地ローラ47の支軸48を左右揺動可能に軸支して支軸48の揺動角度を検出して畝面の傾きを検出したりするようにしても良い。
次に、図14を参照しながら、操作パネル601の下方に設けられた制御部800によるソレノイド470の制御方法について説明する。
図14に示す通り、制御部800に、少なくとも植付入り切りボタン620からの入り切り信号と、昇降操作レバー81の切り替え信号と、植付スイッチ770からの入り切り信号が入力され、これらの入力信号を処理して、制御部800からソレノイド470と変速モータ204にパルス信号が出力される構成である。
以上の構成のもとで、主として図12(a)〜図14を参照しながら、制御部800の動作を中心に説明する。
ここでは、苗移植装置1を圃場の所定位置に移動させた後、(1)植付作業を開始しようとする場面、その後、(2)圃場内を植付作業しながら走行する場面、そして、(3)畝の端まで来て旋回する場面に分けて説明する。
(1)植付作業を開始しようとする場面: 苗移植装置1を圃場の所定位置に移動させたとき、植付入り切りボタン620は「入り」状態に、昇降操作レバー81は「上げ」位置に、それぞれ設定されており、走行車体15の車高は高い位置にあるものとする。
また、作業者は、変速レバー190を「植付1」に設定したとする。これにより、第1変速スイッチ198がONとなり、第2変速スイッチ199がOFFとなり、第1変速スイッチ198からのみON信号が、制御部800に送られる。制御部800は、第1変速スイッチ198からのON信号を受け取り、且つ、第2変速スイッチ199からのON信号を受け取らなかったので、「植付1(低速)」が設定されたと判定して、メモリ部810に予め格納されている、「植付1(低速)」に対応する植付株間の範囲「22cm〜40cm」を読み出して、表示部630の左半分の表示領域に表示させる。
作業者は、表示部630に表示された植付株間の範囲を見て、所望の植付株間である50cmが、その範囲に入っていないことを確認した後、変速レバー190を操作して、「植付2(高速)」に切り替える。そうすると今度は、表示部630の左半分の表示領域に、植付株間の範囲「32cm〜70cm」が表示されると共に、右半分の表示領域に植付株間の仮の値として51cmが表示される。
作業者は、調節ボタン640を押して、仮の値の51cmを自らが所望する50cmに変更する。これにより、植付株間の設定が完了する。
次に作業者が、昇降操作レバー81を「下げ」位置に操作して、走行車体15の車高を下げることにより、センサ板710が走行車体15と共に圃場面701に向けて下がる。センサ板710が圃場面701に接するとセンサ板710の前端部711が矢印Z方向(図13参照)に回動するので、センサロッド780の前端縁部781bが、入り切り検知レバー771を押す方向に移動し、植付スイッチ770をONさせることにより、植付スイッチ770からのON信号が制御部800に入力される。
制御部800は、植付入り切りボタン620から「入り」状態を示す信号と、昇降操作レバー81から「下げ」位置を示す信号と、植付スイッチ770から「ON」信号と、をAND条件の下で受け付けたことにより、ソレノイド470を通電させる信号を出力する。
これにより、植付クラッチ420は「切り」状態から「入り」状態に切り替わり、植付作業が開始される。
即ち、制御部800が、上記各種信号を受けて、植付条件が満たされたと判断すると、先ず植付クラッチ420を「入り」状態に切り替えて、植付具11を作動させる構成としたので、作業者が昇降操作レバー81を操作する等して植付作業を開始したとき、即座に植付具11が1株目の苗を植え付ける。これにより、圃場の端から植付動作を開始出来る。
(2)圃場内を植付作業しながら走行する場面: ここでは、昇降操作レバー81は「下げ」位置にあり、センサ板710は圃場面701の凹凸に応じて上下動しているものとする。
また、制御部800は、ソレノイド470に対して、所定の作動周期で通電させるべく、パルス信号をその作動周期で出力する。従って、植付クラッチ420は、ソレノイド470が通電されることにより「入り」状態になると共に間欠用カム441が回動を開始して1回転し終わると(つまり、苗の植付動作を1回し終わると)「切り」状態に戻るという一連の動作を、当該作動周期で繰り返す。
これにより、植付作業が間欠的に行われて、所望の植付株間が実現される。
ここで、所定の作動周期は、作業者により指定された「植付2(高速)」に対応した走行速度、及び作業者により選択された植付株間の値である50cmとに基づいて、制御部800により決定される。尚、所定の作動周期は、制御部800内のタイマによりカウントされる。
センサ板710の上下動に応じて、油圧昇降シリンダ10が次の通り動作する。
即ち、センサ板710が上方に動くと、センサ板710の前端部711が回動支持軸722aを中心に矢印Z方向に移動するとともに、センサロッド780の一端部781に設けられた連結ピン781aが長孔762の前縁部を押す方向に移動すると、カウンタアーム760が回動支持軸761を軸芯として図13中において時計方向に回動し、この動きがロッド765を介して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に伝達されて、油圧昇降シリンダ10が伸びる方向に作動して、走行車体15の車高が高くなる。
一方、センサ板710が下方に動くと、センサ板710の前端部711が回動支持軸722aを中心に矢印Z方向と反対方向に移動するとともに、センサロッド780の一端部781に設けられた連結ピン781aが長孔762の前縁部から離れる方向に移動すると、引っ張りスプリング766の引っ張り力によりカウンタアーム760が回動支持軸761を軸芯として矢印Y方向に回動し、この動きがロッド765を介して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に伝達されて、油圧昇降シリンダ10が短くなる方向に作動して、走行車体15の車高が低くなる。
上記動作により、圃場面701に凹凸があっても、苗の植付深さを一定に保持することが出来る。
(3)畝の端まで来て旋回する場面: この場面では、作業者は、植付作業を中断させるために、昇降操作レバー81を「下げ」位置から「中立」位置に移動させる。
これにより、制御部800は、昇降操作レバー81からの、「中立」位置を示す信号を受けて、ソレノイド470に対するパルス信号の出力を停止する。これにより、植付クラッチ420は「入り」状態から「切り」状態に切り替わった後は、「切り」状態を維持し続けるので、植付作業が中断される。
更に、作業者は、走行車体15を隣の畝に向けて旋回させるために、昇降操作レバー81を「中立」位置から「上げ」位置に移動させる。
この昇降操作レバー81の操作に応じたケーブル82の動きに連動して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)が作動し、油圧昇降シリンダ10が伸びる方向に移動することにより、走行車体15の車高が高くなる。
この時、センサ板710は下がり、植付スイッチ770がOFF状態になるが、制御部800からは何も信号は出力されない。
尚、植付クラッチ420は「切り」状態を維持しており、植付作業が中断したままの状態が継続されている。
そこで作業者は、走行車体15を旋回させる。
次に作業者は、昇降操作レバー81を「上げ」位置から「中立」位置を経て「下げ」位置に移動させると、昇降操作レバー81の操作に応じたケーブル82の動きに連動して、油圧切替バルブ部40に備えられた昇降操作バルブが作動し、油圧昇降シリンダ10が短くなる方向に移動することにより、走行車体15の車高が低くなり始める。尚、昇降操作レバー81の上記操作により、昇降操作レバー81が「下げ」位置にあることを示す信号が制御部800に対して出力される。
そして、走行車体15の車体が降下して、やがてセンサ板710が圃場面701に接すると、上記項目(1)で説明したのと同様に、植付スイッチ770がONし、その信号が制御部800に入力される。
植付入り切りボタン620は「入り」状態のままであるので、制御部800は、植付入り切りボタン620から「入り」状態を示す信号と、昇降操作レバー81から「下げ」位置を示す信号と、植付スイッチ770から「ON」信号と、をAND条件の下で受け付けたことにより、ソレノイド470を通電させる信号を出力する。即ち、制御部800は、上記と同様に、ソレノイド470に対して、所定の作動周期で通電させるべく、パルス信号をその作動周期で出力する。
これにより、植付クラッチ420は「切り」状態から「入り」状態に切り替わり、再び植付作業が開始される。
尚、この場合、作業者が昇降操作レバー81を操作する等して再び植付作業を開始したとき、制御部800内のタイマのカウントがリセットされる構成としたので、次の畝でも即座に植付具11が1株目の苗を植え付ける。これにより、常に圃場の端から植付動作を開始出来る。
上記構成により、植付入り切りボタン620を「入り」状態にしておくことにより、昇降操作レバー81を操作するだけで、上記の(1)植付作業を開始してから、その後、(2)圃場内を植付作業しながら走行し、そして、(3)畝の端まで来て旋回した後、再び植付作業をするという一連の作業を連続して行える。
上記実施の形態では、移植物として野菜などの苗を用いた場合について説明したが、これに限らず例えば、種芋等どの様な移植物であっても良い。