JP2016197018A - 衝突回避支援装置 - Google Patents
衝突回避支援装置 Download PDFInfo
- Publication number
- JP2016197018A JP2016197018A JP2015075827A JP2015075827A JP2016197018A JP 2016197018 A JP2016197018 A JP 2016197018A JP 2015075827 A JP2015075827 A JP 2015075827A JP 2015075827 A JP2015075827 A JP 2015075827A JP 2016197018 A JP2016197018 A JP 2016197018A
- Authority
- JP
- Japan
- Prior art keywords
- target
- collision avoidance
- image
- unit
- size
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 11
- 238000000034 method Methods 0.000 claims description 43
- 239000000470 constituent Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
- B60T8/17558—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve specially adapted for collision avoidance or collision mitigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/085—Taking automatic action to adjust vehicle attitude in preparation for collision, e.g. braking for nose dropping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/93185—Controlling the brakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4026—Antenna boresight
- G01S7/4034—Antenna boresight in elevation, i.e. in the vertical plane
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30261—Obstacle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/07—Target detection
Abstract
【課題】不必要な衝突回避支援処理の実行を抑制できる衝突支援回避装置を提供すること。
【解決手段】物標を検出する物標検出ユニット(11)と、物標が実行条件を充足すると判断した場合、衝突回避支援処理を実行する処理実行ユニット(15)と、画像において物標を認識する画像認識ユニット(19)と、物標の上下方向での位置Pを取得する位置P取得ユニット(21)と、物標の実際の大きさRSを推定する大きさRS推定ユニット(23)と、条件J1及びJ2が充足される場合、又は、条件J3及びJ4が充足される場合は、それら以外の場合よりも、実行条件を厳しく設定する実行条件設定ユニット(25)とを備えることを特徴とする衝突回避支援装置(1)。J1:前記画像において、位置Pが範囲αよりも下にあること。J2:大きさRSが範囲βよりも小さいこと。J3:前記画像において、位置Pが範囲αよりも上にあること。J4:大きさRSが範囲βよりも大きいこと。
【選択図】 図1
【解決手段】物標を検出する物標検出ユニット(11)と、物標が実行条件を充足すると判断した場合、衝突回避支援処理を実行する処理実行ユニット(15)と、画像において物標を認識する画像認識ユニット(19)と、物標の上下方向での位置Pを取得する位置P取得ユニット(21)と、物標の実際の大きさRSを推定する大きさRS推定ユニット(23)と、条件J1及びJ2が充足される場合、又は、条件J3及びJ4が充足される場合は、それら以外の場合よりも、実行条件を厳しく設定する実行条件設定ユニット(25)とを備えることを特徴とする衝突回避支援装置(1)。J1:前記画像において、位置Pが範囲αよりも下にあること。J2:大きさRSが範囲βよりも小さいこと。J3:前記画像において、位置Pが範囲αよりも上にあること。J4:大きさRSが範囲βよりも大きいこと。
【選択図】 図1
Description
本発明は衝突回避支援装置に関する。
従来、ミリ波レーダを用いて、自車両前方の物標を検出し、検出した物標が所定の条件を充足する場合は、警報等の衝突回避支援処理を行う技術が知られている。物標のうち、マンホールの蓋等の路上構造物は、自車両が容易に乗り越えることができるものであるので、衝突回避支援処理を行う必要はない。特許文献1記載の技術では、ミリ波レーダにおける反射波の特徴から、物標の路面からの高さを推定し、その推定結果に基づき、路上構造物と、衝突回避支援処理が必要な物標とを識別する。
自車両や物標が存在する道路の傾斜によっては、検出した物標が路上構造物であるか否かを正確に識別することは困難である。その結果、路上構造物に対し、不必要な衝突回避支援処理を行うおそれがあった。本発明は、こうした問題にかんがみてなされたものであり、不必要な衝突回避支援処理の実行を抑制できる衝突支援回避装置を提供することを目的としている。
本発明の衝突回避支援装置は、自車両前方の物標を検出する物標検出ユニットと、物標検出ユニットで検出した物標が所定の実行条件を充足するか否かを判断する判断ユニットと、実行条件を充足すると判断ユニットが判断した場合、衝突回避支援処理を実行する処理実行ユニットと、自車両前方の画像を取得する画像取得ユニットと、画像において物標を認識する画像認識ユニットと、画像認識ユニットで認識した物標の画像における上下方向での位置Pを取得する位置P取得ユニットと、画像認識ユニットで認識した物標の画像における大きさS、及び位置Pから、画像認識ユニットで認識した物標の実際の大きさRSを推定する大きさRS推定ユニットと、以下の条件J1及びJ2が充足される場合、又は、以下の条件J3及びJ4が充足される場合は、それら以外の場合よりも、実行条件を厳しく設定する実行条件設定ユニットとを備える。
J1:前記画像において、位置Pが、予め設定された前記画像における上下方向での位置の範囲αよりも下にあること。
J2:大きさRSが、予め設定された大きさの範囲βよりも小さいこと。
J3:前記画像において、位置Pが、前記範囲αよりも上にあること。
J4:大きさRSが、前記範囲βよりも大きいこと。
J1:前記画像において、位置Pが、予め設定された前記画像における上下方向での位置の範囲αよりも下にあること。
J2:大きさRSが、予め設定された大きさの範囲βよりも小さいこと。
J3:前記画像において、位置Pが、前記範囲αよりも上にあること。
J4:大きさRSが、前記範囲βよりも大きいこと。
本発明の衝突回避支援装置は、物標検出ユニットで検出した物標が頭上構造物である可能性が高い場合(条件J1及びJ2が充足される場合)と、路上構造物である可能性が高い場合(条件J3及びJ4が充足される場合)とには、衝突回避支援処理を実行するための実行条件を厳しく設定する。そのことにより、不必要な衝突回避支援処理の実行を抑制できる。
本発明の実施形態を図面に基づき説明する。
<第1の実施形態>
1.衝突回避支援装置1の構成
衝突回避支援装置1の構成を、図1に基づき説明する。衝突回避支援装置1は、車両に搭載される車載装置である。以下では、衝突回避支援装置1を搭載する車両を自車両とする。衝突回避支援装置1は、画像センサ3、ミリ波レーダ5、制御ECU7、及びブレーキECU9を備える。
<第1の実施形態>
1.衝突回避支援装置1の構成
衝突回避支援装置1の構成を、図1に基づき説明する。衝突回避支援装置1は、車両に搭載される車載装置である。以下では、衝突回避支援装置1を搭載する車両を自車両とする。衝突回避支援装置1は、画像センサ3、ミリ波レーダ5、制御ECU7、及びブレーキECU9を備える。
画像センサ3は、自車両の前方の風景を撮影し、画像を生成する。ミリ波レーダ5は、周波数変調されたミリ波帯のレーダ波を送受信することにより、自車両前方の物標(例えば、他の車両、歩行者、路側物、障害物等)を検出する。また、ミリ波レーダ5は、自車両から物標までの距離を測定可能であり、自車両を基準とする物標の方位を特定可能である。
制御ECU7は、CPU、RAM、ROM等を備える公知のコンピュータである。制御ECU7は、ROMに記憶されたプログラムにより、後述する処理を実行する。制御ECU7は、機能的に、物標検出ユニット11、判断ユニット13、処理実行ユニット15、画像取得ユニット17、画像認識ユニット19、位置P取得ユニット21、大きさRS推定ユニット23、及び実行条件設定ユニット25を備える。各ユニットの機能は後述する。
ブレーキECU9は、CPU、RAM、ROM等を備える公知のコンピュータである。ブレーキECU9は、ROMに記憶されたプログラムにより、後述する処理を実行する。すなわち、ブレーキECU9は、後述する実行指示を制御ECU7から受信したとき、自動ブレーキの処理を行う。なお、自動ブレーキは衝突回避支援処理の一例である。
2.衝突回避支援装置1が実行する処理
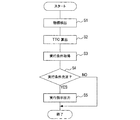
(2−1)実行判断処理
衝突回避支援装置1(特に制御ECU7)が所定時間ごとに繰り返し行う実行判断処理を図2に基づき説明する。図2のステップ1では、物標検出ユニット11が、ミリ波レーダ5を用いて、自車両前方の物標を検出する。
(2−1)実行判断処理
衝突回避支援装置1(特に制御ECU7)が所定時間ごとに繰り返し行う実行判断処理を図2に基づき説明する。図2のステップ1では、物標検出ユニット11が、ミリ波レーダ5を用いて、自車両前方の物標を検出する。
ステップ2では、判断ユニット13が、前記ステップ1で検出した物標の衝突余裕時間(TTC)を繰り返し算出する。TTCは、自車両から物標までの距離Dを、自車両を基準とする物標の相対速度Vで割った値である。判断ユニット13は、ミリ波レーダ5の検出結果から、距離D及び相対速度Vを取得し、それらを用いてTTCを算出する。
ステップ3では、その時点で設定されている実行条件を、判断ユニット13が取得する。実行条件とは、“複数回取得されたTTCのうち、値が基準値I以下であるTTCの割合rが、割合閾値R以上である”という条件である。なお、実行条件は、後述する実行条件設定処理により設定される。
ステップ4では、前記ステップ2で複数回取得したTTCが、前記ステップ3で取得した実行条件を充足するか否かを、判断ユニット13が判断する。すなわち、判断ユニット13は、前記ステップ2で複数回取得したTTCについて、割合rを算出し、その割合rが割合閾値R以上であるか否かを判断する。
例えば、前記ステップ2で取得したTTCの総数をNとし、そのうち、値が基準値I以下であるTTCの数がN1であったとすると、割合rは、N1/Nとなる。判断ユニット13は、そのN1/Nが、割合閾値R以上であるか否かを判断する。
実行条件を充足すると判断した場合はステップ5に進み、充足しないと判断した場合は本処理を終了する。
ステップ5では、処理実行ユニット15が実行指示を出力する。なお、前述したとおり、ブレーキECU9は、その実行指示を受信したとき、自動ブレーキの処理を行う。
(2−2)実行条件設定処理
衝突回避支援装置1(特に制御ECU7)が所定時間ごとに繰り返し行う実行条件設定処理を図3〜図8に基づき説明する。図3のステップ11では、画像取得ユニット17が、画像センサ3を用いて自車両前方の画像を取得する。この画像における上下方向は、撮影した風景における実際の上下方向と一致する。すなわち、風景において上方にある物標は、画像においても上方に存在し、風景において下方に存在する物標は、画像においても下方に存在する。
ステップ5では、処理実行ユニット15が実行指示を出力する。なお、前述したとおり、ブレーキECU9は、その実行指示を受信したとき、自動ブレーキの処理を行う。
(2−2)実行条件設定処理
衝突回避支援装置1(特に制御ECU7)が所定時間ごとに繰り返し行う実行条件設定処理を図3〜図8に基づき説明する。図3のステップ11では、画像取得ユニット17が、画像センサ3を用いて自車両前方の画像を取得する。この画像における上下方向は、撮影した風景における実際の上下方向と一致する。すなわち、風景において上方にある物標は、画像においても上方に存在し、風景において下方に存在する物標は、画像においても下方に存在する。
ステップ12では、画像認識ユニット19が、前記ステップ11で取得した画像において、周知の画像認識技術により、物標を認識する。
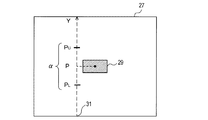
ステップ13は、前記ステップ12で認識した物標の、前記ステップ11で取得した画像における上下方向での位置Pを、位置P取得ユニット21が取得する。この処理を図4に基づき具体的に説明する。図4において27は前記ステップ1で取得した画像であり、29は前記ステップ12で認識した物標である。画像27における上下方向の軸をY軸とする。物標29のY軸における座標を位置Pとする。位置Pは、画像27における固定点(例えば下端31)を基準とする位置である。
ステップ13は、前記ステップ12で認識した物標の、前記ステップ11で取得した画像における上下方向での位置Pを、位置P取得ユニット21が取得する。この処理を図4に基づき具体的に説明する。図4において27は前記ステップ1で取得した画像であり、29は前記ステップ12で認識した物標である。画像27における上下方向の軸をY軸とする。物標29のY軸における座標を位置Pとする。位置Pは、画像27における固定点(例えば下端31)を基準とする位置である。
図3に戻り、ステップ14では、大きさRS推定ユニット23が、まず、前記ステップ12で認識した物標の画像における大きさSを取得する。この大きさSとは、図5Aに示すように、画像27上における物標29の横方向における見かけの大きさ(画像27における横方向での画素数で表される大きさ)である。
なお、大きさSは、図5Bに示すように、画像27上における物標29の縦方向における見かけの大きさ(画像27における縦方向での画素数で表される大きさ)であってもよい。
次に、大きさRS推定ユニット23は、上記のように取得した大きさSと、前記ステップ13で取得した位置Pとから、前記ステップ12で認識した物標の実際の大きさRSを推定する。この推定は以下のように行う。
図6に示すように、自車両31と物標29とが同一平坦面上にあると仮定すると、自車両から物標までの距離Dと、位置Pとは1:1に対応する(距離Dが大きいほど、画像における位置Pは高くなる)。大きさRS推定ユニット23は、予め、位置Pと距離Dとの関係を規定するマップを備えており、このマップに位置Pを入力することで、距離Dを算出する。
また、距離D及び大きさSが決まれば、大きさRSも一義的に決まる。大きさRS推定ユニット23は、予め、距離D及び大きさSと、大きさRSとの関係を規定するマップを備えており、このマップに上記のように算出した距離D、及び前記ステップ14で取得した大きさSを入力することで、大きさRSを推定する。
ステップ16では、前記ステップ11で取得した画像において、前記ステップ13で取得した位置Pが、予め設定された範囲αよりも下にあるか否かを実行条件設定ユニット25が判断する。範囲αとは、図4に示すように、前記ステップ11で取得した画像27内で設定された上下方向での位置の範囲であり、その下限はPLであり、その上限はPUである。画像27において、位置Pが下限PLより下にあれば、前記ステップ11で取得した画像において、位置Pが範囲αよりも下にあることになる。なお、範囲αは、図6に示すように、同一平坦面上に自車両31及び物標29があるときに位置Pが取り得る範囲である。前記ステップ11で取得した画像において、位置Pが範囲αより下にある場合はステップ17に進み、それ以外の場合はステップ20に進む。
ステップ17では、前記ステップ15で推定した大きさRSが、予め設定された範囲βよりも小さいか否かを実行条件設定ユニット25が判断する。範囲βとは、特定の種類の物標が取り得る大きさRSの範囲である。例えば、物標の一例である車両における範囲βは、1.3〜2.5mとすることができる。大きさRSが、範囲βにおける下限値(上の例では1.3m)より小さければ、大きさRSは範囲βより小さいことになる。大きさRSが範囲βより小さい場合はステップ18に進み、それ以外の場合はステップ23に進む。
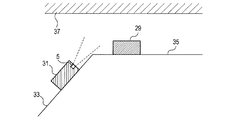
ステップ18では、自車両の周囲の道路の状況が、図7に示す状況Aであると実行条件設定ユニット25が判断する。この状況Aは、自車両31が存在する面33と、自車両31の前方にある物標29が存在する面35とが、山型を構成する状況である。状況Aには、面33が上り坂であり、面35が水平面であるケース、面33が水平面であり、面35が下り坂であるケース、面33が上り坂であり、面35が下り坂であるケース等が含まれる。なお、前記の登り坂、下り坂とは自車両にとっての登り坂、下り坂である。
なお、状況Aである場合、位置Pは低くなるので前記ステップ16では肯定判断される。また、位置Pが低いので距離Dが実際より小さく算出され、その結果、大きさRSは実際より小さく推定されるので、前記ステップ17では肯定判断される。
ステップ19では、実行条件設定ユニット25が、実行条件を通常より厳しく設定する。具体的には、“複数回取得されたTTCのうち、値が基準値I以下であるTTCの割合rが、割合閾値R以上である”という実行条件において、割合閾値Rの値を、通常の値であるR1よりも大きいR2とする。なお、基準値Iは固定値である。
一方、前記ステップ16で否定判断した場合はステップ20に進み、前記ステップ11で取得した画像において、前記ステップ13で取得した位置Pが、予め設定された範囲αよりも上にあるか否かを実行条件設定ユニット25が判断する。前記ステップ11で取得した画像において、位置Pが上限PU(図4参照)より上にあれば、前記ステップ11で取得した画像において、位置Pが範囲αよりも上にあることになる。前記ステップ11で取得した画像において、位置Pが範囲αより上にある場合はステップ21に進み、それ以外の場合はステップ23に進む。
ステップ21では、前記ステップ15で推定した大きさRSが、予め設定された範囲βよりも大きいか否かを実行条件設定ユニット25が判断する。大きさRSが、範囲βにおける上限値より大きければ、大きさRSは範囲βより大きいことになる。大きさRSが範囲βより大きい場合はステップ22に進み、それ以外の場合はステップ23に進む。
ステップ22では、自車両の周囲の道路の状況が、図8に示す状況Bであると実行条件設定ユニット25が判断する。この状況Bは、自車両31が存在する面33と、自車両31の前方にある物標29が存在する面35とが、谷型を構成する状況である。状況Bには、面33が下り坂であり、面35が水平面であるケース、面33が水平面であり、面35が登り坂であるケース、面33が下り坂であり、面35が登り坂であるケース等が含まれる。
なお、状況Bである場合、位置Pは高くなるので前記ステップ20では肯定判断される。また、位置Pが高いので距離Dが実際より大きく算出され、その結果、大きさRSは実際より大きく推定されるので、前記ステップ21では肯定判断される。
ステップ23では、実行条件設定ユニット25が、実行条件を通常のものに設定する。具体的には、“複数回取得されたTTCのうち、値が基準値I以下であるTTCの割合rが、割合閾値R以上である”という実行条件において、割合閾値Rの値を、通常の値であるR1とする。なお、基準値Iは固定値である。
なお、前記ステップ16で肯定判断することは条件J1を充足することの一例であり、前記ステップ17で肯定判断することは条件J2を充足することの一例であり、前記ステップ20で肯定判断することは条件J3を充足することの一例であり、前記ステップ21で肯定判断することは条件J4を充足することの一例である。
3.衝突回避支援装置1が奏する効果
(1A)状況Aでは、図7に示すように、頭上構造物37が自車両31の正面方向に存在することがある。頭上構造物37とは、その下を自車両が通過できる構造物(例えば、標識、橋等)である。頭上構造物37が存在する場合、ミリ波レーダ5はそれを検出する。しかしながら、衝突回避支援装置1は、状況Aの場合、実行条件を通常より厳しくするので、頭上構造物37を検出しても、それに対する衝突回避支援処理の実行を抑制することができる。
(1A)状況Aでは、図7に示すように、頭上構造物37が自車両31の正面方向に存在することがある。頭上構造物37とは、その下を自車両が通過できる構造物(例えば、標識、橋等)である。頭上構造物37が存在する場合、ミリ波レーダ5はそれを検出する。しかしながら、衝突回避支援装置1は、状況Aの場合、実行条件を通常より厳しくするので、頭上構造物37を検出しても、それに対する衝突回避支援処理の実行を抑制することができる。
(1B)状況Bでは、図8に示すように、路面構造物39(例えばマンホールの蓋等)が自車両31の正面方向に存在することがある。この場合、ミリ波レーダ5は路面構造物39を検出する。しかしながら、衝突回避支援装置1は、状況Bの場合、実行条件を通常より厳しくするので、路面構造物39を検出しても、それに対する衝突回避支援処理の実行を抑制することができる。
(1C)衝突回避支援装置1は、実行条件として、“複数回取得されたTTCのうち、値が基準値I以下であるTTCの割合rが、割合閾値R以上である”という条件である。そのことにより、衝突回避支援処理を実行するか否かを適切に判断することができる。
(1D)衝突回避支援装置1は、前記ステップ19において、割合閾値Rを通常より大きくすることで、実行条件を厳しくする。そのことにより、実行条件の厳しさを容易に変更することができる。
(1E)衝突回避支援装置1は、衝突回避支援処理として自動ブレーキを実行する。そのことにより、自車両の安全性が向上する。
<その他の実施形態>
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されることなく、種々の形態を採り得る。
<その他の実施形態>
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されることなく、種々の形態を採り得る。
(1)実行条件は、“TTCが所定の時間閾値T以下である”という条件であってもよい。この場合、実行条件設定ユニット25は、前記ステップ19において、時間閾値Tを、通常の値T1よりも小さいT2に設定する。また、実行条件設定ユニット25は、前記ステップ23において、時間閾値Tを、通常の値T1とする。
実行条件の内容、及びその設定方法が上記のものである場合、衝突回避支援装置1は、前記(1A)、(1B)、(1E)の効果に加えて、以下の効果(2A)、(2B)を奏することができる。
(2A)衝突回避支援装置1は、実行条件が上記のものであることにより、衝突回避支援処理を実行するか否かを適切に判断することができる。
(2B)衝突回避支援装置1は、前記ステップ19において、時間閾値Tを、通常の値T1よりも小さくすることで、実行条件を厳しくする。そのことにより、実行条件の厳しさを容易に変更することができる。
(2B)衝突回避支援装置1は、前記ステップ19において、時間閾値Tを、通常の値T1よりも小さくすることで、実行条件を厳しくする。そのことにより、実行条件の厳しさを容易に変更することができる。
(2)衝突回避支援装置1は、ミリ波レーダ5に代えて、他の手段(例えば、ステレオカメラ、ライダー等)を用いて物標を検出してもよい。
(3)衝突回避支援装置1は、自動ブレーキに代えて、あるいはそれに加えて、他の衝突回避支援処理(例えば、ブレーキアシスト、自動操舵、警報処理等)を実行してもよい。
(3)衝突回避支援装置1は、自動ブレーキに代えて、あるいはそれに加えて、他の衝突回避支援処理(例えば、ブレーキアシスト、自動操舵、警報処理等)を実行してもよい。
(4)衝突回避支援装置1は、状況Aであると判断した場合は前記ステップ19の処理を行うが、その他の場合(状況Bである場合も含む)は、前記ステップ19の処理を行わなくてもよい。また、衝突回避支援装置1は、状況Bであると判断した場合は前記ステップ19の処理を行うが、その他の場合(状況Aである場合も含む)は、前記ステップ19の処理を行わなくてもよい。
(5)衝突回避支援装置1は、前記ステップ19において、基準値Iの値として、通常よりも小さい値を設定し、前記ステップ23において、基準値Iの値として、通常の値を設定してもよい。この場合、割合閾値Rの値は、固定値であってもよいし、前記ステップ19において、通常より大きい値を設定してもよい。
(6)上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合させたりしてもよい。また、上記実施形態の構成の少なくとも一部を、同様の機能を有する公知の構成に置き換えてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。なお、特許請求の範囲に記載した文言のみによって特定される技術思想に含まれるあらゆる態様が本発明の実施形態である。
(7)上述した衝突回避支援装置の他、当該衝突回避支援装置を構成要素とするシステム、当該衝突回避支援装置における制御ECU又はブレーキECUとしてコンピュータを機能させるためのプログラム、このプログラムを記録した媒体、衝突回避支援方法等、種々の形態で本発明を実現することもできる。
1…衝突回避支援装置、3…画像センサ、5…ミリ波レーダ、7…制御ECU、9…ブレーキECU、11…物標検出ユニット、13…判断ユニット、15…処理実行ユニット、17…画像取得ユニット、19…画像認識ユニット、21…位置P取得ユニット、23…大きさRS推定ユニット、25…実行条件設定ユニット、27…画像、29…物標、31…下端、31…自車両、33、35…面、37…頭上構造物、39…路面構造物
Claims (5)
- 自車両前方の物標を検出する物標検出ユニット(11)と、
前記物標検出ユニットで検出した物標が所定の実行条件を充足するか否かを判断する判断ユニット(13)と、
前記実行条件を充足すると前記判断ユニットが判断した場合、衝突回避支援処理を実行する処理実行ユニット(15)と、
自車両前方の画像を取得する画像取得ユニット(17)と、
前記画像において物標を認識する画像認識ユニット(19)と、
前記画像認識ユニットで認識した物標の前記画像における上下方向での位置Pを取得する位置P取得ユニット(21)と、
前記画像認識ユニットで認識した物標の前記画像における大きさS、及び前記位置Pから、前記画像認識ユニットで認識した物標の実際の大きさRSを推定する大きさRS推定ユニット(23)と、
以下の条件J1及びJ2が充足される場合、又は、以下の条件J3及びJ4が充足される場合は、それら以外の場合よりも、前記実行条件を厳しく設定する実行条件設定ユニット(25)と、
を備えることを特徴とする衝突回避支援装置(1)。
J1:前記画像において、前記位置Pが、予め設定された前記画像における上下方向での位置の範囲αよりも下にあること。
J2:前記大きさRSが、予め設定された大きさの範囲βよりも小さいこと。
J3:前記画像において、前記位置Pが、前記範囲αよりも上にあること。
J4:前記大きさRSが、前記範囲βよりも大きいこと。 - 請求項1に記載の衝突回避支援装置であって、
前記実行条件は、前記物標の衝突余裕時間が所定の時間閾値以下であるという条件、又は、複数回取得された前記衝突余裕時間のうち、値が基準値以下である前記衝突余裕時間の割合が、所定の割合閾値以上であるという条件であることを特徴とする衝突回避支援装置。 - 請求項2に記載の衝突回避支援装置であって、
前記実行条件設定ユニットは、前記条件J1及びJ2が充足される場合、又は、前記条件J3及びJ4が充足される場合は、それら以外の場合よりも、前記時間閾値を小さくするか、前記割合閾値を大きくすることを特徴とする衝突回避支援装置。 - 請求項1〜3のいずれか1項に記載の衝突回避支援装置であって、
前記物標検出ユニットは、ミリ波レーダを用いて物標を検出することを特徴とする衝突回避支援装置。 - 請求項1〜4のいずれか1項に記載の衝突回避支援装置であって、
前記衝突回避支援処理は、ブレーキアシスト、自動ブレーキ、自動操舵、及び警報処理のうちの1以上であることを特徴とする衝突回避支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015075827A JP2016197018A (ja) | 2015-04-02 | 2015-04-02 | 衝突回避支援装置 |
| US15/562,177 US10442430B2 (en) | 2015-04-02 | 2016-03-18 | Collision avoidance assistance device |
| PCT/JP2016/058680 WO2016158491A1 (ja) | 2015-04-02 | 2016-03-18 | 衝突回避支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015075827A JP2016197018A (ja) | 2015-04-02 | 2015-04-02 | 衝突回避支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016197018A true JP2016197018A (ja) | 2016-11-24 |
Family
ID=57004254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015075827A Pending JP2016197018A (ja) | 2015-04-02 | 2015-04-02 | 衝突回避支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10442430B2 (ja) |
| JP (1) | JP2016197018A (ja) |
| WO (1) | WO2016158491A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019086402A (ja) * | 2017-11-07 | 2019-06-06 | 株式会社Subaru | 車両用障害物検知装置 |
| JPWO2019225258A1 (ja) * | 2018-05-23 | 2021-06-24 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 異常検出装置、異常検出システム及び制御方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6988200B2 (ja) * | 2017-06-29 | 2022-01-05 | 株式会社デンソー | 車両制御装置 |
| US20190041861A1 (en) * | 2017-08-04 | 2019-02-07 | Aptiv Technologies Limited | Automated vehicle tracking system |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11203458A (ja) * | 1998-01-13 | 1999-07-30 | Nissan Motor Co Ltd | 道路形状認識装置 |
| JPH11266450A (ja) * | 1998-03-17 | 1999-09-28 | Toshiba Corp | 物体領域追跡装置および物体領域追跡方法 |
| JP2003014844A (ja) * | 2001-07-04 | 2003-01-15 | Nissan Motor Co Ltd | 物体種別判定装置及び物体種別判定方法 |
| JP2006146372A (ja) * | 2004-11-16 | 2006-06-08 | Denso Corp | 車両用物体認識装置 |
| JP2008152672A (ja) * | 2006-12-19 | 2008-07-03 | Fujitsu Ten Ltd | 画像認識装置、画像認識方法および電子制御装置 |
| JP2008186384A (ja) * | 2007-01-31 | 2008-08-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2009223797A (ja) * | 2008-03-18 | 2009-10-01 | Denso Corp | 障害物検出装置 |
| JP2014164461A (ja) * | 2013-02-25 | 2014-09-08 | Denso Corp | 歩行者検出装置、および歩行者検出方法 |
| JP2014169922A (ja) * | 2013-03-04 | 2014-09-18 | Denso Corp | 物標認識装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7389171B2 (en) * | 2003-12-22 | 2008-06-17 | Ford Global Technologies Llc | Single vision sensor object detection system |
| JP4905512B2 (ja) | 2009-07-09 | 2012-03-28 | 株式会社デンソー | 物標情報推定装置 |
| JP5537492B2 (ja) * | 2011-05-12 | 2014-07-02 | 富士重工業株式会社 | 環境認識装置 |
| JP5971341B2 (ja) * | 2012-08-09 | 2016-08-17 | トヨタ自動車株式会社 | 物体検出装置及び運転支援装置 |
| US9545923B2 (en) * | 2014-07-14 | 2017-01-17 | Palo Alto Research Center Incorporated | Metamaterial-based object-detection system |
| US9568611B2 (en) * | 2014-08-20 | 2017-02-14 | Nec Corporation | Detecting objects obstructing a driver's view of a road |
-
2015
- 2015-04-02 JP JP2015075827A patent/JP2016197018A/ja active Pending
-
2016
- 2016-03-18 WO PCT/JP2016/058680 patent/WO2016158491A1/ja active Application Filing
- 2016-03-18 US US15/562,177 patent/US10442430B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11203458A (ja) * | 1998-01-13 | 1999-07-30 | Nissan Motor Co Ltd | 道路形状認識装置 |
| JPH11266450A (ja) * | 1998-03-17 | 1999-09-28 | Toshiba Corp | 物体領域追跡装置および物体領域追跡方法 |
| JP2003014844A (ja) * | 2001-07-04 | 2003-01-15 | Nissan Motor Co Ltd | 物体種別判定装置及び物体種別判定方法 |
| JP2006146372A (ja) * | 2004-11-16 | 2006-06-08 | Denso Corp | 車両用物体認識装置 |
| JP2008152672A (ja) * | 2006-12-19 | 2008-07-03 | Fujitsu Ten Ltd | 画像認識装置、画像認識方法および電子制御装置 |
| JP2008186384A (ja) * | 2007-01-31 | 2008-08-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2009223797A (ja) * | 2008-03-18 | 2009-10-01 | Denso Corp | 障害物検出装置 |
| JP2014164461A (ja) * | 2013-02-25 | 2014-09-08 | Denso Corp | 歩行者検出装置、および歩行者検出方法 |
| JP2014169922A (ja) * | 2013-03-04 | 2014-09-18 | Denso Corp | 物標認識装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019086402A (ja) * | 2017-11-07 | 2019-06-06 | 株式会社Subaru | 車両用障害物検知装置 |
| JP7122101B2 (ja) | 2017-11-07 | 2022-08-19 | 株式会社Subaru | 車両用障害物検知装置 |
| JPWO2019225258A1 (ja) * | 2018-05-23 | 2021-06-24 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 異常検出装置、異常検出システム及び制御方法 |
| JP7178408B2 (ja) | 2018-05-23 | 2022-11-25 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 異常検出装置、異常検出システム及び制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180086337A1 (en) | 2018-03-29 |
| US10442430B2 (en) | 2019-10-15 |
| WO2016158491A1 (ja) | 2016-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5870908B2 (ja) | 車両の衝突判定装置 | |
| JP6536521B2 (ja) | 物体検知装置及び物体検知方法 | |
| US10871565B2 (en) | Object detection apparatus and object detection method | |
| JP6856452B2 (ja) | 物標判定装置及び運転支援システム | |
| JP6132359B2 (ja) | 走行区画線認識装置 | |
| JP6654923B2 (ja) | 地図情報出力装置 | |
| JP6140658B2 (ja) | 走行区画線認識装置、走行区画線認識プログラム | |
| WO2017111135A1 (ja) | 走行支援装置及び走行支援方法 | |
| JP6819281B2 (ja) | 衝突判定装置、および、衝突判定システム | |
| US10339393B2 (en) | Demarcation line recognition apparatus | |
| JP6717240B2 (ja) | 物標検出装置 | |
| JP6354659B2 (ja) | 走行支援装置 | |
| US10996317B2 (en) | Object detection apparatus and object detection method | |
| JP5986949B2 (ja) | 境界線認識装置 | |
| JP6105509B2 (ja) | 走路推定装置及び走路推定プログラム | |
| US10482332B2 (en) | Pedestrian determining apparatus for determining whether an object is a pedestrian crossing ahead of an own vehicle | |
| WO2016158491A1 (ja) | 衝突回避支援装置 | |
| JP6165120B2 (ja) | 走行区画線認識装置 | |
| US10706296B2 (en) | Vehicle safety determination apparatus, method, and computer-readable storage medium | |
| US10068142B2 (en) | Detection apparatus, detection method, driving assistance apparatus, and driving assistance method | |
| JP5298104B2 (ja) | 車両の制御装置 | |
| JP4913101B2 (ja) | 車両用道路形状検出装置 | |
| JP6152069B2 (ja) | 走行支援装置 | |
| JP2013161202A (ja) | 車両周辺監視装置 | |
| JP2016018256A (ja) | 分岐合流判定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180703 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181002 |