JP2015231663A - 多数の要素システムを制御調節する装置および方法 - Google Patents
多数の要素システムを制御調節する装置および方法 Download PDFInfo
- Publication number
- JP2015231663A JP2015231663A JP2015114768A JP2015114768A JP2015231663A JP 2015231663 A JP2015231663 A JP 2015231663A JP 2015114768 A JP2015114768 A JP 2015114768A JP 2015114768 A JP2015114768 A JP 2015114768A JP 2015231663 A JP2015231663 A JP 2015231663A
- Authority
- JP
- Japan
- Prior art keywords
- tcp
- adjustment
- torque
- force
- individual elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D17/00—Control of torque; Control of mechanical power
- G05D17/02—Control of torque; Control of mechanical power characterised by the use of electric means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1638—Program controls characterised by the control loop compensation for arm bending/inertia, pay load weight/inertia
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39176—Compensation deflection arm
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39194—Compensation gravity
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39319—Force control, force as reference, active compliance
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Manipulator (AREA)
- Feedback Control In General (AREA)
- Numerical Control (AREA)
Abstract
【解決手段】
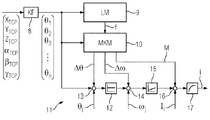
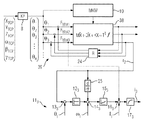
予め決められた基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)に依存して、システムの動作中に連続的に、各個別要素についてそれぞれ1つの力ベクトルを算定する負荷計算装置(9)と、前記基準座標および前記力ベクトルに基づいて、運動中に連続的に、前記力ベクトルを補償する少なくとも1つの補償量(M)を算定するトルク計算装置(10)とが設けられている。さらに、制御調節装置は、前記基準座標および前記少なくとも1つの補償回転トルクに依存して、運動中に連続的に、前記少なくとも1つの駆動装置のための力形成量(i)を調節する調節ユニット(11)を持つ。
【選択図】図2
Description
・個別要素の質量特性および空間内の質量挙動
・関節および動力伝達系の弾性(場合によっては要素の弾性も含む)
・ばね要素の線形減衰特性
・個々の自由度の間の幾何学的な強制条件もしくは線形依存性
・関節の定義(タイプ、位置および方向性)
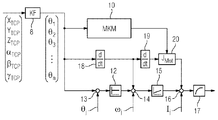
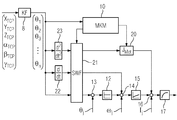
・モデル(即ち、マルチ要素モデル)から導き出される特性を有する位置基準値フィルタ(ゼロ設定、図5参照)
・モデルのための多次元の状態調節の構想およびそれによって生じる操作量のフィードフォワード制御(図6参照)
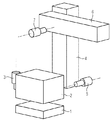
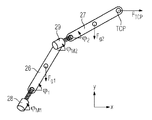
・アーム26は基台上に回転可能に支持されている。
・アーム27はアーム26に対して回転可能に支持されている
・電動機28は基台に対して相対的に回転のみできる。
・電動機29はアーム26と一緒に移動させられ、アーム26に対して相対的に回転のみできる。
2 ロボット本体
3 電動機
4 第1アーム
5 電動機
6 第2アーム
7 電動機
8 変換ユニット
9 負荷モデル(負荷計算装置)
10 マルチ要素モデル(トルク計算装置)
11 調節ユニット
12 位置調節ユニット
13 加算器
14 加算器
15 速度調節器
16 加算器
17 電流調節器
18 微分器
19 微分器
20 乗算器
21 基準値フィルタ
22 微分器
23 2階微分器
24 調節器
25 微分器
26,27 アーム
28,29 電動機
30〜35 線
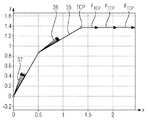
36,37 矢印
Claims (11)
- 運動学的に協働する複数の個別要素(1,2,4,6,26,27)を有し、そのうち少なくとも1つが駆動装置(3,5,7,28,29)により移動可能であるシステムの動作を制御調節装置であって、
予め決められた基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)に依存して、前記システムの動作中に連続的に、各個別要素についてそれぞれ1つの力ベクトルを算定する負荷計算装置(9)と、
前記基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)および前記力ベクトルに基づいて、運動中に連続的に、前記力ベクトルを補償する少なくとも1つの補償量を算定するトルク計算装置(10)と、
前記基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)および前記少なくとも1つの補償量に依存して、運動中に連続的に、前記少なくとも1つの駆動装置のための力形成量を調節する調節ユニット(11)と、
前記駆動装置の実際回転トルクを監視するために、前記駆動装置のための少なくとも1つの最適指令量又は前記駆動装置の少なくとも1つの最適回転トルクを算定することを可能にするシステムの制御軌道のモデル(38)と、
を備えた制御調節装置。 - 前記補償量が、補償回転トルク、補償力、補償速度又は補償位置である、請求項1記載の制御調節装置。
- 前記負荷計算装置(9)が、各力ベクトルを算定するために、前記個別要素(1,2,4,6,26,27)の1つにおける力を導入する個所および/又は方向および/又は大きさを考慮した負荷モデルを使用する、請求項1又は2記載の制御調節装置。
- 前記調節ユニット(11)が、カスケード接続された位置調節系、速度調節系、および、圧力調節系又は電流調節系を有する、請求項1乃至3の1つに記載の制御調節装置。
- 前記トルク計算装置(10)が、少なくとも1つの補償トルクを算定するために、前記個別要素(1,2,4,6,26,27)のそれぞれの質量および/又は弾性および/又は減衰および/又は自由度の線形依存性を考慮したマルチ要素モデルを使用する、請求項1乃至4の1つに記載の制御調節装置。
- 前記マルチ要素モデルが、線形微分方程式系に基づいている、請求項5記載の制御調節装置。
- 前記線形微分方程式系が、前記個別要素(1,2,4,6,26,27)のそれぞれに関する質量行列、減衰行列および剛性行列に基づいている、請求項6記載の制御調節装置。
- 前記マルチ要素モデルにおいて、前記個別要素(1,2,4,6,26,27)にそれぞれ作用する慣性力および/又はジャイロ力が考慮されている、請求項1乃至7の1つに記載の制御調節装置。
- 前記トルク計算装置(10)により、前記個別要素(1,2,4,6,26,27)の1つの最大加速度又は複数の前記個別要素の複合体の最大加速度が運動中に連続的に算定可能である、請求項1乃至8の1つに記載の制御調節装置。
- 前記トルク計算装置(10)および前記調節ユニット(11)が、運動中に連続的にシステムの少なくとも1つの固有振動数の励起を低減するように構成されている、請求項1乃至9の1つに記載の制御調節装置。
- 運動学的に協働する複数の個別要素(1,2,4,6,26,27)を有し、そのうち少なくとも1つが駆動装置(3,5,7,28,29)により移動されるシステムの動作を制御調節方法であって、
予め決められた基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)に依存して、システムの動作中に連続的に、前記個別要素(1,2,4,6,26,27)のそれぞれについて1つの力ベクトルを算定し、
前記基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)および前記力ベクトルに基づいて、運動中に連続的に、前記力ベクトルを補償する少なくとも1つの補償量を算定し、
前記基準座標(XTCP,YTCP,ZTCP,αTCP,βTCP,γTCP)および前記少なくとも1つの補償量に依存して、運動中に連続的に、前記少なくとも1つの駆動装置のための力形成量を調節し、
前記駆動装置の実際回転トルクを監視するために、システムの制御軌道のモデル(38)により、前記駆動装置のための少なくとも1つの最適指令量又は前記駆動装置の少なくとも1つの最適回転トルクを算定する、
制御調節方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14171752.0A EP2954986B1 (de) | 2014-06-10 | 2014-06-10 | Vorrichtung und Verfahren zum Steuern und Regeln eines Mehrkörpersystems |
| EP14171752.0 | 2014-06-10 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015231663A true JP2015231663A (ja) | 2015-12-24 |
| JP2015231663A5 JP2015231663A5 (ja) | 2017-03-02 |
| JP6430335B2 JP6430335B2 (ja) | 2018-11-28 |
Family
ID=50932995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015114768A Active JP6430335B2 (ja) | 2014-06-10 | 2015-06-05 | 多数の要素システムを制御調節する装置および方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10007280B2 (ja) |
| EP (1) | EP2954986B1 (ja) |
| JP (1) | JP6430335B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019005821A (ja) * | 2017-06-21 | 2019-01-17 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| WO2019043852A1 (ja) * | 2017-08-30 | 2019-03-07 | 三菱電機株式会社 | 数値制御システムおよびモータ制御装置 |
| WO2022244441A1 (ja) * | 2021-05-18 | 2022-11-24 | 株式会社豊田自動織機 | マニピュレータ |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013010290A1 (de) * | 2013-06-19 | 2014-12-24 | Kuka Laboratories Gmbh | Überwachen eines kinematisch redundanten Roboters |
| EP3115857A1 (de) | 2015-07-09 | 2017-01-11 | Siemens Aktiengesellschaft | Trajektorienbestimmungsverfahren für nebenzeitbewegungen |
| EP3131202A1 (de) | 2015-08-11 | 2017-02-15 | Siemens Aktiengesellschaft | Filterumschaltverfahren für eine maschinensteuerung |
| EP3136192A1 (de) | 2015-08-24 | 2017-03-01 | Siemens Aktiengesellschaft | Steuerungsverfahren für die bewegung eines werkzeugs und steuerungsvorrichtung |
| EP3144754A1 (de) | 2015-09-17 | 2017-03-22 | Siemens Aktiengesellschaft | Dämpfung von lastschwingungen ohne zusätzliche messmittel an der lastseite |
| EP3176657A1 (de) | 2015-12-02 | 2017-06-07 | Siemens Aktiengesellschaft | Bestimmung der steifigkeit eines antriebsstranges einer maschine, insbesondere einer werkzeug- oder produktionsmaschine |
| EP3287244A1 (de) | 2016-08-26 | 2018-02-28 | Siemens Aktiengesellschaft | Rastmomentkompensation bei einem industrieroboter |
| CN106426164B (zh) * | 2016-09-27 | 2019-04-09 | 华南理工大学 | 一种冗余度双机械臂的多指标协调运动规划方法 |
| DE102017104335A1 (de) | 2017-03-02 | 2018-09-06 | Physik Instrumente (Pi) Gmbh & Co. Kg | Vorrichtung zur Bewegungsanalyse und Antriebsvorrichtung |
| CN107398903B (zh) * | 2017-09-04 | 2020-06-30 | 杭州电子科技大学 | 工业机械手臂执行端的轨迹控制方法 |
| CN108015765B (zh) * | 2017-11-22 | 2019-06-18 | 华南理工大学 | 一种机器人运动规划的拓展解集对偶神经网络解决方法 |
| DE102018112360B3 (de) | 2018-05-23 | 2019-09-19 | Franka Emika Gmbh | Bereichsabhängige Kollisionsdetektion für einen Robotermanipulator |
| DE102018112370B4 (de) * | 2018-05-23 | 2021-09-16 | Franka Emika Gmbh | Richtungsabhängige Kollisionsdetektion für einen Robotermanipulator |
| DE102018004947B3 (de) * | 2018-06-22 | 2019-07-18 | Sew-Eurodrive Gmbh & Co Kg | Verfahren zur Steuerung von Antrieben eines Roboters und Robotersystem |
| DE102018128175A1 (de) * | 2018-11-12 | 2020-05-14 | Technische Universität Darmstadt | Verfahren und Vorrichtung zur Ermittlung von Verlagerungen eines Werkzeugmittelpunktes |
| CN109597438B (zh) * | 2018-11-30 | 2021-09-24 | 上海航天控制技术研究所 | 一种控制力矩陀螺 |
| EP3685969A1 (de) * | 2019-01-28 | 2020-07-29 | Siemens Aktiengesellschaft | Rechnergestützte optimierung einer numerisch gesteuerten bearbeitung eines werkstücks |
| CN109856978B (zh) * | 2019-03-26 | 2022-02-15 | 广东电网有限责任公司 | 一种获取被控对象模型的方法及装置 |
| EP3753682B1 (de) | 2019-06-17 | 2021-12-29 | Schneider Electric Industries SAS | Verfahren zur steuerung eines antriebsmotors |
| EP3764536A1 (en) * | 2019-07-11 | 2021-01-13 | DENTSPLY SIRONA Inc. | Method of operating a stepper motor in a dental tool machine |
| EP3848951A1 (en) * | 2020-01-07 | 2021-07-14 | ABB Power Grids Switzerland AG | Control scheme for the operation of an electric motor actuator for a medium to high voltage circuit breaker |
| EP3961320B1 (de) | 2020-08-26 | 2024-06-26 | Siemens Aktiengesellschaft | Verfahren und eine einrichtung zur bewegungsführung eines bewegbaren maschinenelements einer maschine |
| EP4119302A1 (en) * | 2021-07-15 | 2023-01-18 | Siemens Aktiengesellschaft | A method for estimating one or more process forces associated with a tool center point of a machine tool |
| KR102683264B1 (ko) * | 2022-03-18 | 2024-07-08 | 영산대학교산학협력단 | 딥러닝을 활용한 재활치료용 로봇의 절대 위치 예측 방법 |
| EP4462202A1 (de) | 2023-05-10 | 2024-11-13 | Siemens Aktiengesellschaft | Reglerstruktur für gemischt direkten/indirekten antrieb eines maschinenelements |
| EP4653149A1 (de) | 2024-05-24 | 2025-11-26 | Siemens Aktiengesellschaft | Betreiben eines systems mit mehreren körperelementen |
| CN119024762A (zh) * | 2024-08-31 | 2024-11-26 | 盐城市鑫纬嘉新能源科技有限公司 | 一种基于图像处理的黑色金属加工方法及系统 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11104985A (ja) * | 1997-10-06 | 1999-04-20 | Yaskawa Electric Corp | 冗長自由度マニピュレータのコンプライアンス、軌道追従制御方法および装置 |
| WO2009034957A1 (ja) * | 2007-09-14 | 2009-03-19 | Kabushiki Kaisha Yaskawa Denki | ロボットの力制御方法、制御装置およびロボットシステム |
| JP2010012575A (ja) * | 2008-07-07 | 2010-01-21 | Sony Corp | 制御装置及び制御方法 |
| JP2011152599A (ja) * | 2010-01-26 | 2011-08-11 | Ihi Corp | ロボットのキャリブレーション方法および装置 |
| JP2011230238A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットの制御装置およびロボットを制御する方法 |
| JP2011230257A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットキャリブレーション装置及びキャリブレーション方法 |
| JP2011230234A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットの接触位置を検出するための装置及び方法 |
| JP2013078838A (ja) * | 2011-09-30 | 2013-05-02 | Siemens Ag | 移動可能な機械構造体の振動補償付き加工機械 |
| JP2013198962A (ja) * | 2012-03-26 | 2013-10-03 | Denso Wave Inc | ロボットの制御方法、およびロボットの制御装置 |
| WO2013180222A1 (ja) * | 2012-05-30 | 2013-12-05 | 株式会社神戸製鋼所 | 多関節ロボットの軌跡制御装置および制御方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05277976A (ja) * | 1992-03-31 | 1993-10-26 | Nippon Telegr & Teleph Corp <Ntt> | 動力学モデルパラメータ同定装置 |
| JP3681431B2 (ja) * | 1995-02-21 | 2005-08-10 | ファナック株式会社 | 直交座標系上で柔らかさが調節可能なサーボ系 |
| US6470225B1 (en) * | 1999-04-16 | 2002-10-22 | Siemens Energy & Automation, Inc. | Method and apparatus for automatically tuning feedforward parameters |
| SE0001312D0 (sv) * | 2000-04-10 | 2000-04-10 | Abb Ab | Industrirobot |
| US7390309B2 (en) * | 2002-09-23 | 2008-06-24 | Honda Motor Co., Ltd. | Human assist system using gravity compensation control system and method using multiple feasibility parameters |
| DE10245594A1 (de) | 2002-09-30 | 2004-04-08 | Dürr Systems GmbH | Verfahren zur Kollisionserkennung |
| US7212886B2 (en) * | 2002-12-12 | 2007-05-01 | Kabushiki Kaisha Yaskawa Denki | Robot control apparatus and method |
| US8024068B2 (en) * | 2006-08-04 | 2011-09-20 | Hurco Companies, Inc. | Machine tool control system |
| DE102007017578A1 (de) * | 2007-04-13 | 2008-10-16 | Kuka Roboter Gmbh | Robotersteuerung, Industrieroboter und Verfahren zum Erhalten eines absolutgenauen Modells |
| DE102007024143A1 (de) * | 2007-05-24 | 2008-11-27 | Dürr Systems GmbH | Bewegungssteuerung für elastische Roboterstrukturen |
| US9652201B2 (en) * | 2010-10-01 | 2017-05-16 | Adobe Systems Incorporated | Methods and systems for physically-based runtime effects |
| DE102011003506A1 (de) * | 2011-02-02 | 2012-08-16 | Kuka Roboter Gmbh | Industrieroboter |
| US9002503B2 (en) * | 2011-04-04 | 2015-04-07 | Okuma Corporation | Method and program for calculating correction value for machine tool |
| DE102011111758A1 (de) * | 2011-08-24 | 2013-02-28 | Dürr Systems GmbH | Steuerverfahren für einen Roboter |
| JP5962020B2 (ja) * | 2012-01-17 | 2016-08-03 | セイコーエプソン株式会社 | ロボット制御装置、ロボットシステム、ロボット及びロボット制御方法 |
| US8803465B1 (en) * | 2012-04-06 | 2014-08-12 | Exelis Inc. | Frequency-selective command profile motion control |
| DE102013010290A1 (de) * | 2013-06-19 | 2014-12-24 | Kuka Laboratories Gmbh | Überwachen eines kinematisch redundanten Roboters |
-
2014
- 2014-06-10 EP EP14171752.0A patent/EP2954986B1/de active Active
-
2015
- 2015-06-05 JP JP2015114768A patent/JP6430335B2/ja active Active
- 2015-06-09 US US14/734,747 patent/US10007280B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11104985A (ja) * | 1997-10-06 | 1999-04-20 | Yaskawa Electric Corp | 冗長自由度マニピュレータのコンプライアンス、軌道追従制御方法および装置 |
| WO2009034957A1 (ja) * | 2007-09-14 | 2009-03-19 | Kabushiki Kaisha Yaskawa Denki | ロボットの力制御方法、制御装置およびロボットシステム |
| JP2010012575A (ja) * | 2008-07-07 | 2010-01-21 | Sony Corp | 制御装置及び制御方法 |
| JP2011152599A (ja) * | 2010-01-26 | 2011-08-11 | Ihi Corp | ロボットのキャリブレーション方法および装置 |
| JP2011230238A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットの制御装置およびロボットを制御する方法 |
| JP2011230257A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットキャリブレーション装置及びキャリブレーション方法 |
| JP2011230234A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットの接触位置を検出するための装置及び方法 |
| JP2013078838A (ja) * | 2011-09-30 | 2013-05-02 | Siemens Ag | 移動可能な機械構造体の振動補償付き加工機械 |
| JP2013198962A (ja) * | 2012-03-26 | 2013-10-03 | Denso Wave Inc | ロボットの制御方法、およびロボットの制御装置 |
| WO2013180222A1 (ja) * | 2012-05-30 | 2013-12-05 | 株式会社神戸製鋼所 | 多関節ロボットの軌跡制御装置および制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| KOUHEI OHNISHI, MASAAKI SHIBATA, TOSHIYUKI MURAKAMI: "Motion Control for Advanced Mechatronics", IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 1, NO. 1, JPN6017049327, March 1996 (1996-03-01), US, ISSN: 0003707619 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019005821A (ja) * | 2017-06-21 | 2019-01-17 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| WO2019043852A1 (ja) * | 2017-08-30 | 2019-03-07 | 三菱電機株式会社 | 数値制御システムおよびモータ制御装置 |
| JPWO2019043852A1 (ja) * | 2017-08-30 | 2020-01-16 | 三菱電機株式会社 | 数値制御システムおよびモータ制御装置 |
| WO2022244441A1 (ja) * | 2021-05-18 | 2022-11-24 | 株式会社豊田自動織機 | マニピュレータ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2954986A1 (de) | 2015-12-16 |
| EP2954986B1 (de) | 2020-05-06 |
| US20150355647A1 (en) | 2015-12-10 |
| JP6430335B2 (ja) | 2018-11-28 |
| US10007280B2 (en) | 2018-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6430335B2 (ja) | 多数の要素システムを制御調節する装置および方法 | |
| De Luca et al. | Robots with flexible elements | |
| CN109664297B (zh) | 机器人的振动抑制方法、系统、装置及计算机可读存储器 | |
| JP6097174B2 (ja) | ロボット制御装置 | |
| US9242374B2 (en) | Robotic control apparatus | |
| Li et al. | Adaptive robust synchronization control of a dual-linear-motor-driven gantry with rotational dynamics and accurate online parameter estimation | |
| EP3023208B1 (en) | Control device for motor drive device, control device for multi-axial motor, and control method for motor drive device | |
| EP2505956A1 (en) | Coordinate measuring machine | |
| KR102312368B1 (ko) | 여자유도 로봇 제어 시스템, 방법, 및 상기 방법을 실행시키기 위한 컴퓨터 판독 가능한 프로그램을 기록한 기록 매체 | |
| JPS63314606A (ja) | 多関節ロボットの制御装置 | |
| CN106393098A (zh) | 机器人、控制装置以及机器人系统 | |
| CN100504695C (zh) | 位置控制装置、测量装置以及加工装置 | |
| Sariyildiz et al. | Robust position control of a novel series elastic actuator via disturbance observer | |
| Huynh et al. | Multibody dynamic modeling of five-axis machine tool vibrations and controller | |
| Dumetz et al. | Control of an industrial robot using acceleration feedback | |
| Erlbacher | Force control basics | |
| JP5441944B2 (ja) | モータ制御装置 | |
| Liegeois et al. | Learning and control for a compliant computer-controlled manipulator | |
| Eppinger | Modeling robot dynamic performance for endpoint force control | |
| JP5836231B2 (ja) | 動力伝達装置 | |
| JP2003157114A (ja) | ロストモーション補正方法およびロストモーション補正装置 | |
| Ider | Force and motion trajectory tracking control of flexible-joint robots | |
| Pitakwatchara | Task space impedance control of the manipulator driven through the multistage nonlinear flexible transmission | |
| JP5225060B2 (ja) | 機械運動測定装置 | |
| JP2023116029A (ja) | ロボット制御システム、ロボットシステム、ロボット制御方法、およびロボット制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170125 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171226 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181002 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181031 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6430335 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |