JP2015201526A - プロファイル生成方法、露光装置およびデバイス製造方法 - Google Patents
プロファイル生成方法、露光装置およびデバイス製造方法 Download PDFInfo
- Publication number
- JP2015201526A JP2015201526A JP2014078876A JP2014078876A JP2015201526A JP 2015201526 A JP2015201526 A JP 2015201526A JP 2014078876 A JP2014078876 A JP 2014078876A JP 2014078876 A JP2014078876 A JP 2014078876A JP 2015201526 A JP2015201526 A JP 2015201526A
- Authority
- JP
- Japan
- Prior art keywords
- exposure
- scanning
- time
- information
- generation method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【課題】露光動作のプロファイルに関し、露光時間の短縮化に有利なプロファイル生成方法を提供する。
【解決手段】露光動作プロファイルは、基板を保持する移動体が加減速している時点を含む区間において走査露光を行う、非走査方向に隣接する複数の単位露光領域に対して正方向と負方向との走査露光を交互に行う、1つの単位露光領域への走査露光を終了した状態から次への走査露光を開始するまでの間に、移動体が次の単位露光領域に向けた非走査方向へのステップ移動を行うとの条件を満たす。プロファイル生成方法は、走査露光している間の移動体の加速度の時間関数を示す第1指令情報と、走査露光していない間の第2指令情報と、非露光時間情報と、走査露光している間に移動体が走査方向に移動する距離を示す距離情報とを含む第1情報を設定する工程と、第1情報に基づいて走査露光している間の時間を示す露光時間情報を含む第2情報を求める工程とを含む。
【選択図】図3
【解決手段】露光動作プロファイルは、基板を保持する移動体が加減速している時点を含む区間において走査露光を行う、非走査方向に隣接する複数の単位露光領域に対して正方向と負方向との走査露光を交互に行う、1つの単位露光領域への走査露光を終了した状態から次への走査露光を開始するまでの間に、移動体が次の単位露光領域に向けた非走査方向へのステップ移動を行うとの条件を満たす。プロファイル生成方法は、走査露光している間の移動体の加速度の時間関数を示す第1指令情報と、走査露光していない間の第2指令情報と、非露光時間情報と、走査露光している間に移動体が走査方向に移動する距離を示す距離情報とを含む第1情報を設定する工程と、第1情報に基づいて走査露光している間の時間を示す露光時間情報を含む第2情報を求める工程とを含む。
【選択図】図3
Description
本発明は、プロファイル生成方法、露光装置およびデバイス製造方法に関する。
露光装置は、半導体デバイスなどの製造工程の1つであるリソグラフィ工程において、原版(レチクルなど)に形成されているパターンの像を投影光学系を介して感光性の基板(表面にレジスト層が形成されたウエハなど)に露光する装置である。このような露光装置としては、基板上に存在する複数の単位露光領域において、1つの単位露光領域に対して静止状態で一括露光を行う露光装置(ステッパー)や、基板と原版とを同期させながら走査露光する走査型露光装置(スキャナー)がある。
ここで、スキャナーは、基板を保持するステージ(移動体)が等速で移動している期間に露光するのが一般的である。そして、この等速期間の前後には、ステージの加速期間と減速期間とが存在する。露光装置には、可能な限り短時間で多くのデバイスを処理することが求められるので、これらの各期間を含む処理時間は、短ければ短いほどよい。しかしながら、処理時間を短縮する条件として、単に露光速度(走査速度)を速くすればよいというわけではない。特許文献1は、等速期間でのみ露光する場合に、露光距離、加速期間および減速期間での加速度で表された算出式を用いて、処理時間が短くなるように走査速度を決定する露光装置を開示している。一方、特許文献2は、等速期間のみならず、加速期間や減速期間にも露光を行う走査型露光装置を開示している。
しかしながら、特許文献1に開示されている技術は、ステージの等速期間でのみ露光する場合に適用されるものである。したがって、特許文献1に開示されている技術を、単純に特許文献2に開示されている加速期間や減速期間にも露光する場合に適用することができない。
本発明は、このような状況に鑑みてなされたものであり、例えば、露光動作のプロファイルに関し、露光時間の短縮化に有利なプロファイル生成方法を提供することを目的とする。
上記課題を解決するために、本発明は、基板を走査させながら、原版に形成されているパターンの像を基板上に露光する露光装置の露光動作プロファイルを生成するプロファイル生成方法であって、露光動作プロファイルは、基板を保持する移動体が加速している時点または減速している時点の少なくともいずれかを含む区間において走査露光を行うという第1の条件と、非走査方向に隣接する基板上の複数の単位露光領域に対して、正方向への走査露光と負方向への走査露光とを交互に行うという第2の条件と、1つの単位露光領域への走査露光を終了した状態から次の単位露光領域への走査露光を開始するまでの間に、移動体が次の単位露光領域に向けた非走査方向へのステップ移動を行うという第3の条件と、のすべての条件を満たし、プロファイル生成方法は、走査露光している間の移動体の加速度の時間関数を示す第1指令情報と、走査露光していない間の加速度の時間関数を示す第2指令情報と、1つの単位露光領域への走査露光を終了した状態から次の単位露光領域への走査露光を開始するまでの時間を示す非露光時間情報と、走査露光している間に移動体が走査方向に移動する距離を示す距離情報と、を含む第1情報を設定する工程と、設定された第1情報に基づいて、走査露光している間の時間を示す露光時間情報を含む第2情報を求める工程と、第1情報と第2情報とに基づいて、露光動作プロファイルを決定する工程と、を含むことを特徴とする。
本発明によれば、例えば、露光動作のプロファイルに関し、露光時間の短縮化に有利なプロファイル生成方法を提供することができる。
以下、本発明を実施するための形態について図面などを参照して説明する。
(第1実施形態)
まず、本発明の第1実施形態に係るプロファイル生成方法について説明する。本実施形態に係るプロファイル生成方法は、露光装置の露光動作プロファイルを生成するものである。はじめに、本実施形態に係るプロファイル生成方法を適用し得る露光装置について説明する。図1は、本実施形態における露光装置100の構成を示す概略図である。露光装置100は、一例として、半導体デバイスの一製造工程であるリソグラフィ工程に使用され、ステップ・アンド・スキャン方式にてレチクル6に形成されているパターンの像をウエハ8上(基板上)に露光(転写)する走査型露光装置である。露光装置100は、照明光学系と、レチクルステージ9と、投影光学系7と、ウエハステージ10と、制御部15とを備える。なお、図1では、投影光学系7の光軸(本実施形態では鉛直方向)に平行にZ軸を取り、Z軸に垂直な平面内で露光時のレチクル6およびウエハ8の走査方向にY軸を取り、Y軸に直交する非走査方向にX軸を取っている。
まず、本発明の第1実施形態に係るプロファイル生成方法について説明する。本実施形態に係るプロファイル生成方法は、露光装置の露光動作プロファイルを生成するものである。はじめに、本実施形態に係るプロファイル生成方法を適用し得る露光装置について説明する。図1は、本実施形態における露光装置100の構成を示す概略図である。露光装置100は、一例として、半導体デバイスの一製造工程であるリソグラフィ工程に使用され、ステップ・アンド・スキャン方式にてレチクル6に形成されているパターンの像をウエハ8上(基板上)に露光(転写)する走査型露光装置である。露光装置100は、照明光学系と、レチクルステージ9と、投影光学系7と、ウエハステージ10と、制御部15とを備える。なお、図1では、投影光学系7の光軸(本実施形態では鉛直方向)に平行にZ軸を取り、Z軸に垂直な平面内で露光時のレチクル6およびウエハ8の走査方向にY軸を取り、Y軸に直交する非走査方向にX軸を取っている。
照明光学系は、前段照明光学系3と、遮光板4と、後段照明光学系5とを含む。前段照明光学系3は、光源1から出射された光(光束2)を受け、遮光板4へ導光する。遮光板4は、開口部を有し、X軸方向に長い帯状または円弧状の照射領域を形成する。後段照明光学系5は、遮光板4により照射領域が規定された光をレチクル6へ照射する。レチクル6は、ウエハ8上に露光されるべきパターン(例えば回路パターン)が形成された、例えば石英ガラス製の原版である。レチクルステージ9は、レチクル6を保持し、第1駆動部11の駆動によりXYの各軸方向に移動可能である。投影光学系7は、照明光学系からの光で照明されたレチクル6のパターンの像を所定の投影倍率(例えば1/2倍)でウエハ8上に投影する。ウエハ8は、表面上にレジスト(感光剤)が塗布された、例えば単結晶シリコンからなる基板である。ウエハステージ(移動体)10は、ウエハ8を保持し、第2駆動部12の駆動により少なくともXYZの各軸方向に移動可能である。ここで、レチクル6とウエハ8とは、レチクルステージ9とウエハステージ10との移動により、露光時には投影光学系7を介して光学的にほぼ共役な位置(投影光学系7の物体面、像面)に配置される。また、レチクルステージ9の位置は、レチクルステージ9側に固定された不図示の参照ミラーとの間の距離を第1レーザー干渉計13で計測することで求められる。同様に、ウエハステージ10の位置は、ウエハステージ10側に固定された不図示の参照ミラーとの間の距離を第2レーザー干渉計14で計測することで求められる。なお、このような位置計測器としては、レーザー干渉計以外に、例えばエンコーダや静電容量センサーなども採用し得る。制御部15は、例えばコンピューターなどで構成され、露光装置100の各構成要素に回線を介して接続され、プログラムなどにしたがって各構成要素の動作制御および演算処理などを実行し得る。なお、制御部15は、露光装置100の他の部分と一体で(共通の筐体内に)構成してもよいし、露光装置100の他の部分とは別体で(別の筐体内に)構成してもよい。
制御部15は、各レーザー干渉計13、14からの情報に基づいて、レチクルステージ9とウエハステージ10との双方が、XY平面内で投影光学系7の投影倍率に応じた速度比で同期走査するように、各駆動部11、12の動作を制御する。また、制御部15は、光源1と遮光板4との動作も同時に制御することで、レチクル6のパターンの像がウエハ8上に転写(投影)され、ウエハ8上のレジストが感光し露光(走査露光)される。
次に、本実施形態に係るプロファイル生成方法について具体的に説明する。はじめに、本実施形態に係るプロファイル生成方法の特徴を明確にするために、本発明を適用しない場合の露光動作プロファイルについて説明する。
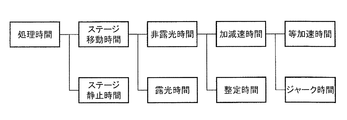
図5は、本発明を適用しない露光にかかる処理時間の内訳を示すブロック図である。まず、処理時間は、ステージ(以下「ウエハステージ」を指すが、レチクルステージも同期して動作する)が移動している時間(ステージ移動時間)と、ステージが静止している時間(ステージ停止時間)とに分けられる。このうち、ステージ静止時間には、アライメント時にウエハの位置をスコープ計測する時間や、ウエハステージに対するウエハの乗せ降ろしをする時間などが含まれる。一方、ステージ移動時間に着目すると、ウエハに露光が行なわれている時間(露光時間)と、行なわれていない時間(非露光時間)とに分けられる。
ここで、まず、本発明を適用しない場合の非露光時間について説明する。図6は、従来の時間tに対するステージの走査速度Vを示すグラフである。まず、ウエハは、時刻t0でステージに搭載され、時刻t0からt1までの期間でアライメント処理が行なわれる。ステージは、アライメント処理が完了する時刻t1から加速を開始し、ある一定速度まで加速した後、しばらく等速移動して、その後減速する。一般的な露光装置は、この等速期間(時刻t5からt6までの期間)でのみ露光を行う。ウエハにパターンを転写しレジストが感光するまでには、ある一定以上の露光量が必要となり、良好な露光を実現するには露光量を均一にする必要がある。したがって、露光中に走査速度(露光速度)が変わると、それに合わせて時間当たりの露光量を調整しなければならなくなるので、このように等速期間において時間当たりの露光量を一定にして露光が行われる。また、加速から等速に移行する瞬間においては、移動体としてのステージがモータ(駆動部)から受ける推力が変化する。そのため、等速期間の始めのうちは、ステージが変形や振動をしている。したがって、良好な露光を実現するには、等速状態になってしばらくした後、すなわち推力変化によるステージの変形や振動がなくなった後に、露光を開始する必要がある。以下、この等速期間に入った後に、実際に露光を開始するまでの待ち時間(時刻t4からt5までの期間)を「整定時間」という。また、上記のようなステージの変形や振動が生じぬよう、ステージに加わる推力すなわち加速度は、ある程度緩やかに変化させる必要がある。以下、この加速期間から緩やかに等速期間に移行させる時間(時刻t3からt4までの期間)を「ジャーク時間」という。なお、減速期間もジャーク時間を含む。このように、従来の処理時間における非露光時間は、加速時間、整定時間および減速時間とに分けられる。さらに、加減速時間は、ジャーク時間と、等加速時間とに分けられる。
次に、本発明を適用しない露光時間について説明する。図7は、従来の露光期間(図6に示す時刻t5からt6までの期間)の繰り返しを説明するためのグラフであり、図6と同様、時間tに対する走査速度Vを示す。ただし、texpoは、露光時間(走査露光時間)であり、その間が露光期間(走査露光期間)に相当する。tupは、走査速度Vの走査方向の速度成分がゼロの状態から露光開始までの加速時間であり、その間が露光前の加速期間に相当する。tdownは、露光終了から走査速度Vの走査方向の速度成分がゼロに至るまでの減速時間であり、その間が露光後の減速期間に相当する。露光期間の速度の積分、すなわちVscan×texpoは、露光距離Lである。また、加速期間の速度の微分、すなわちVscan/tupは、ステージの加速度aupであり、同様に、Vscan/tdownは、ステージの減速度adownである。
ここで、1回の露光の処理時間Tは、加速度aup、減速度adown、露光距離L、および露光期間中の走査速度Vscanを用いると、式(1)で表される。

加速度aupおよび減速度adownは、露光装置の各ステージの仕様により決定する。また、露光距離Lは、露光すべきデバイスのチップサイズにより決定する。すなわち、処理時間Tは、式(1)より、走査速度Vscanに依存することがわかる。
これに対して、式(2)から、処理時間Tが最短となる走査速度Vscanを表す式(3)が導かれる。
一般に露光装置では、処理時間Tが短ければ短いほどよいが、そのためには、単に走査速度Vscanを速くすればよいものではない。すなわち、式(3)からわかるとおり、処理時間Tを最短にするためには、露光距離L、加速度aupおよび減速度adownの設定バランスを考慮して、走査速度Vscanを決めなければならない。一方、さらなる処理時間Tの短縮のために、等速期間のみでなく加速期間や減速期間にも露光をする方法も存在する。しかしながら、この方法には、等速期間のみにおける走査露光に適用し得る上記のような走査速度Vscanを決定する条件を単純に適用することができない。
そこで、本実施形態では、各パラメータを以下のように定義し、予め設定されたパラメータ群としての第1情報に基づいて、露光時間情報や走査速度に関する情報などを含む第2情報を求め、第1情報と第2情報とに基づいて露光動作プロファイルを決定する。
第1情報に含まれ得るパラメータとしては、走査加速度に関する第1指令情報および第2指令情報と、非露光時間情報と、距離情報とがある。第1指令情報は、走査露光している間のステージの加速度の時間関数を示す情報である。具体的には、第1指令情報は、加速期間開始(加速時間tup開始)からある時刻tの走査方向の走査加速度成分aup(t)と、減速期間開始(減速時間tdown開始)からある時刻tの走査方向の走査加速度成分adown(t)とが相当する。第2指令情報は、走査露光していない間の加速度の時間関数を示す情報であり、具体的には、露光期間開始(露光時間texpo開始)からある時刻tの走査方向の走査加速度成分aexpo(t)が相当する。非露光時間情報は、1つの単位露光領域への走査露光を終了した状態から次の単位露光領域への走査露光を開始するまでの時間tcを示す情報である。また、距離情報は、走査露光している間にステージが走査方向に移動する距離(露光距離L)を示す情報である。
一方、第2情報に含まれ得るパラメータとしての露光時間情報は、走査露光している間の時間(露光時間texpo)を示す情報である。また、第2情報に含まれ得るパラメータとしての走査速度に関する情報は、以下の3つの走査速度成分を含み得る。すなわち、この情報は、加速期間開始からある時刻tの走査方向の走査速度成分vup(t)と、露光期間開始からある時刻tの走査方向の走査速度成分vexpo(t)と、減速期間開始からある時刻tの走査方向の走査速度成分vdown(t)とが相当する。
まず、第1の工程として、第1情報、すなわちこの第1情報に含まれる各種パラメータの設定を行う。はじめに、時間tcの設定について説明する。図2は、ウエハ8上に設定されている複数の単位露光領域(いわゆるショット領域)と、これらの単位露光領域に対するステージの軌道とを一部例示する平面図である。時間tcは、任意に決定することができ、ここでは、各単位露光領域に対する各走査露光の合間に、走査方向に垂直な方向に単位露光領域1つ分移動(ステップ)する時間とする。以下、単位露光領域1つ分移動する時間を「ステップ時間」という。ステップ時間tstepは、ステップ方向の動作プロファイルと移動距離とに基づいて決定される。本実施形態では、露光時間短縮のために走査速度vをできるだけ速くするよう、ステップ時間tstepと、露光後の減速時間tdownと次の露光前の加速時間tupとの和とが等しいとする。すなわち、式(4)が成り立つ。
また、本実施形態では、走査露光を連続的に短時間で行うために、非走査方向に隣接するウエハ8上の複数の単位露光領域に対して、正方向への走査露光と負方向への走査露光とを交互に行う、すなわち走査露光1回ごとに走査方向を反転させる。
次に、単位露光領域に応じた露光距離Lは、上記の各パラメータの定義より成り立つ式(5)から求められる。
また、本実施形態では、リソグラフィ工程後のダイシングを容易にするために、チップの端が揃うようにパターン転写するよう、ある走査露光後の走査方向の空走距離と、その次の露光前の走査方向の助走距離とが等しいとする。すなわち、式(6)および(7)が成り立つ。
ここで、時刻tに対する走査速度vと走査加速度aとの初期条件より、式(8)ないし(13)が成り立つ。まず、加速期間開始時刻では、走査方向の速度成分はゼロであるから、式(8)が成り立つ。
また、加速期間終了と露光期間開始とは同時刻であり、走査方向の速度成分および加速度成分は等しいから、式(9)および(10)が成り立つ。
また、露光期間終了と減速期間開始とは同時刻であり、走査方向の速度成分および加速度成分は等しいから、式(11)および(12)が成り立つ。
さらに、減速期間終了時刻は、次の走査露光の加速期間開始時刻であり、走査方向の速度成分はゼロであるから、式(13)が成り立つ。
次に、第2の工程として、これらの条件式を連立させて解けば、第2情報に含まれる各パラメータを一意に求めることができる。そして、第3の工程として、予め設定されている第1情報に含まれる各パラメータ、または第2の工程で求められた第2情報に含まれる各パラメータから、露光動作プロファイルを決定する。
次に、具体的な各パラメータの設定について例示する。ここでは、露光前、露光中および露光後の走査方向の加速度、速度および位置の各プロファイルを設定する。図3は、本実施形態における露光動作プロファイルの目標形を示すグラフであり、上段が加速度、中段が速度、および下段が位置の各プロファイルである。この例では、走査速度vを最大限に高めるために、露光前の期間では、第1駆動部11および第2駆動部12(以下「駆動機構」という。)が許容する最大限の加速度をかける。また、露光後には、引き続き行われる逆向きの走査露光の走査速度vも最大限に高めるために、露光前とは逆向きに、駆動機構が許容する最大限の加速度(減速度)をかける。さらに、本実施形態では、露光期間における露光開始から露光終了にかけて、加速度が最大から最小へ一定の割合で変化するものとする。これらの条件は、以下のような式で表される。
まず、露光前の期間について、上記の条件は、式(14)から(16)で表される。
また、露光期間について、上記の条件は、式(17)から(19)で表される。
また、露光後の期間について、上記の条件は、式(20)から(23)で表される。
そして、式(22)および(23)より、式(24)が導かれる。
一方、上記のとおり、ある露光終了から次の露光開始までの期間に、最初の露光後の減速と次の露光前の加速が行われるから、式(4)が成り立ち、かつ、露光距離Lの関係より、式(25)が成り立つ。
また、上記のとおり、チップ端を揃えるよう、走査方向の露光前の助走距離と露光後の空走距離とを等しくするから、式(26)が成り立ち、式(6)および(26)より、式(27)が成り立ち、式(28)が導かれる。
ここで、式(24)および(28)より、露光時間texpoを消去すると、式(29)が導かれる。
また、amax=−aminであるとすると、tup=tdownであり、これを式(4)に代入すると、tup=tdown=tstep/2となるから、これらを式(25)に代入すると、式(30)が導かれる。
そして、式(30)を変形すれば、露光時間texpoを表す式(31)が導かれる。
これらの式に、予め任意に設定されている値を代入する。ここで、予め設定されている値は、最大加速度amaxと、最小加速度aminと、露光距離Lと、ステップ時間tstepとである。具体的には、例えば、最大加速度amaxを+9.8(m/s2)と、最小加速度aminを−9.8(m/s2)と、露光距離Lを0.038(m)と、ステップ時間tstepを0.100(s)と設定し得る。これにより、以下の6つのパラメータの値が求まり、露光動作プロファイルが決定する。まず、時間tに関して決定されるパラメータとして、露光前の加速時間tupは、0.050(s)となり、露光時間texpoは、0.064(s)となり、露光後の減速時間tdownは、0.050(s)となる。また、決定される単位露光領域あたりの処理時間Tは、0.164(s)となる。そして、速度vに関して決定されるパラメータとして、露光開始速度vstartは、0.490(m/s)となり、露光最高速度vmaxは、0.647(m/s)となり、 露光終了速度vendは、0.490(m/s)となる。
このように、本実施形態に係るプロファイル生成方法は、特定の条件を与えることで、走査露光を等速期間のみならず加速期間や減速期間で行う場合にも、露光時間を短縮化させるに好適な露光動作プロファイルを生成することができる。ここで、特定の条件をまとめると、以下のとおりである。第1の条件は、ウエハ8を保持する移動体が加速している時点または減速している時点の少なくともいずれかを含む区間において走査露光を行うというものである。第2の条件は、非走査方向に隣接するウエハ8上の複数の単位露光領域に対して、正方向への走査露光と負方向への走査露光とを交互に行うというものである。そして、第3の条件は、1つの単位露光領域への走査露光を終了した状態から、次の単位露光領域への走査露光を開始するまでの間に、次の単位露光領域に向けた非走査方向へのステップ移動を行うというものである。そして、本実施形態における露光動作プロファイルは、これらの条件をすべて満たすものとする。
なお、本実施形態に係るプロファイル生成方法は、露光装置100とは別の、例えば情報処理装置にてプログラムとして実行されるものとし、得られた露光動作プロファイルを露光装置100に適用する(制御部15に導入して実行する)ものとし得る。または、制御部15にて直接的にプログラムとして実行され、制御部15が、得られた露光動作プロファイルをそのまま実行するものとしてもよい。
以上のように、本実施形態によれば、露光動作のプロファイルに関し、露光時間の短縮化に有利なプロファイル生成方法を提供することができる。
(第2実施形態)
次に、本発明の第2実施形態に係るプロファイル生成方法について説明する。本実施形態に係るプロファイル生成方法の特徴は、基本的には第1実施形態に係るプロファイル生成方法を踏襲しつつ、適用し得る具体例を、図6に示すものに換えて図7に示すような露光動作プロファイルに適用する点にある。図7は、本実施形態における露光動作プロファイルの目標形を示すグラフであり、上段が加速度、中段が速度、および下段が位置の各プロファイルである。以下、第1実施形態における説明と同様に、本実施形態における具体的なパラメータの設定について例示する。特に、本実施形態における各パラメータについては、第1実施形態とほぼ同じであるが、露光期間の捉え方が異なる。
次に、本発明の第2実施形態に係るプロファイル生成方法について説明する。本実施形態に係るプロファイル生成方法の特徴は、基本的には第1実施形態に係るプロファイル生成方法を踏襲しつつ、適用し得る具体例を、図6に示すものに換えて図7に示すような露光動作プロファイルに適用する点にある。図7は、本実施形態における露光動作プロファイルの目標形を示すグラフであり、上段が加速度、中段が速度、および下段が位置の各プロファイルである。以下、第1実施形態における説明と同様に、本実施形態における具体的なパラメータの設定について例示する。特に、本実施形態における各パラメータについては、第1実施形態とほぼ同じであるが、露光期間の捉え方が異なる。
第1実施形態では、露光時間texpoの短縮を第一に考え、そのときの露光時間texpoおよび走査速度vを定めた。これに対して、実際の運用では、露光光量に限りがあることから、レジストが良好に感光するのに必要な光量を蓄積するために、走査速度vが制限される場合がある。また、万が一ステージが暴走したときの損傷を抑えるためにも、走査速度vの最高値vmaxは制限されるのが一般的である。そこで、本実施形態では、走査速度vに上限を定め、すなわち走査速度vの最高値(露光最高速度)vmaxを第1実施形態でいうところの第1情報に含まれるパラメータと捉え、露光期間の加速度および速度を次のように規定する。
まず、露光前の期間については、第1実施形態と同様に、式(15)および(16)が成り立つ。次に、露光期間について、ここでは、さらに3つの期間に分けられる。まず、露光期間中、最高加速度から加速度ゼロに至るまでの期間(第1露光時間tex1)について、本実施形態における条件は、式(32)から(35)で表される。
次に、露光期間中、加速度ゼロの期間(第2露光時間tex2)について、本実施形態における条件は、式(36)および(37)で表される。
そして、露光期間中、加速度ゼロから最小加速度に至るまでの期間(第3露光時間tex3)について、本実施形態における条件は、式(38)から(40)で表される。
ただし、走査速度vmaxは、上記のとおり、制限された最高速度(露光最高速度)である。
また、露光後の期間について、本実施形態における条件は、式(41)から(44)で表される。
一方、第1実施形態と同様に、ある露光終了から次の露光開始までの期間に、最初の露光後の減速と次の露光前の加速が行われるから、式(4)が成り立ち、かつ、露光距離Lの関係より、式(45)が成り立つ。
また、第1実施形態と同様に、チップ端を揃えるよう、走査方向の露光前の助走距離と露光後の空走距離とを等しくするから、式(46)が成り立ち、式(6)および(46)より、式(47)が成り立ち、式(48)が導かれる。
ここで、式(44)および(48)より、第3露光時間tex3を消去すると、式(49)が導かれる。
また、amax=−aminであるとすると、tup=tdownであり、これを式(44)に代入すると、tup=tdown=tstep/2となるから、これらを式(35)に代入すると、式(50)が導かれる。
そして、式(50)を変形すれば、第1露光時間tex1を表す式(51)が導かれる。
また、式(51)を式(44)に代入すると、式(52)となり、式(52)を変形すれば、第3露光時間tex3を表す式(53)が導かれる。
さらに、式(51)および(53)を式(45)に代入すると、式(54)となり、式(54)を変形すれば、第2露光時間tex2を表す式(55)が導かれる。
これらの式に、予め任意に設定されている値を代入する。ここで、予め設定されている値は、最大加速度amaxと、最小加速度aminと、露光距離Lと、ステップ時間tstepとに加え、本実施形態では露光最高速度vmaxである。具体的には、例えば、最大加速度amaxを+9.8(m/s2)と、最小加速度aminを−9.8(m/s2)と、露光距離Lを0.038(m)と、ステップ時間tstepを0.100(s)と、露光最高速度vmaxを0.550(m/s)と設定し得る。これにより、以下の8つのパラメータの値が求まり、露光動作プロファイルが決定する。まず、時間tに関して決定されるパラメータとして、露光前の加速時間tupは、0.050(s)となり、露光後の減速時間tdownは、0.050(s)となる。また、露光時間については、第1露光時間tex1は、0.012(s)となり、第2露光時間tex2は、0.046(s)となり、第3露光時間tex3は、0.012(s)となる。また、決定される単位露光領域あたりの処理時間Tは、0.170(s)となる。そして、速度vに関して決定されるパラメータとして、露光開始速度vstartは、0.490(m/s)となり、露光終了速度vendは、0.490(m/s)となる。このように、本実施形態によれば、走査速度vに上限を持たせているために、第1実施形態の結果に比べて露光時間が若干長くなるものの、第1実施形態と同様の効果を奏する。
(デバイスの製造方法)
次に、本発明の一実施形態のデバイス(半導体デバイス、液晶表示デバイスなど)の製造方法について説明する。半導体デバイスは、ウエハに集積回路を作る前工程と、前工程で作られたウエハ上の集積回路チップを製品として完成させる後工程を経ることにより製造される。前工程は、前述の露光装置を使用して感光剤が塗布されたウエハを露光する工程と、ウエハを現像する工程を含む。後工程は、アッセンブリ工程(ダイシング、ボンディング)と、パッケージング工程(封入)を含む。液晶表示デバイスは、透明電極を形成する工程を経ることにより製造される。透明電極を形成する工程は、透明導電膜が蒸着されたガラス基板に感光剤を塗布する工程と、前述の露光装置を使用して感光剤が塗布されたガラス基板を露光する工程と、ガラス基板を現像する工程を含む。本実施形態のデバイス製造方法によれば、従来よりも高品位のデバイスを製造することができる。
次に、本発明の一実施形態のデバイス(半導体デバイス、液晶表示デバイスなど)の製造方法について説明する。半導体デバイスは、ウエハに集積回路を作る前工程と、前工程で作られたウエハ上の集積回路チップを製品として完成させる後工程を経ることにより製造される。前工程は、前述の露光装置を使用して感光剤が塗布されたウエハを露光する工程と、ウエハを現像する工程を含む。後工程は、アッセンブリ工程(ダイシング、ボンディング)と、パッケージング工程(封入)を含む。液晶表示デバイスは、透明電極を形成する工程を経ることにより製造される。透明電極を形成する工程は、透明導電膜が蒸着されたガラス基板に感光剤を塗布する工程と、前述の露光装置を使用して感光剤が塗布されたガラス基板を露光する工程と、ガラス基板を現像する工程を含む。本実施形態のデバイス製造方法によれば、従来よりも高品位のデバイスを製造することができる。
以上、本発明の好ましい実施形態について説明したが、本発明は、これらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
9 レチクルステージ
10 ウエハステージ
15 制御部
100 露光装置
10 ウエハステージ
15 制御部
100 露光装置
Claims (6)
- 基板を走査させながら、原版に形成されているパターンの像を前記基板上に露光する露光装置の露光動作プロファイルを生成するプロファイル生成方法であって、
前記露光動作プロファイルは、
前記基板を保持する移動体が加速している時点または減速している時点の少なくともいずれかを含む区間において走査露光を行うという第1の条件と、
非走査方向に隣接する前記基板上の複数の単位露光領域に対して、正方向への走査露光と負方向への走査露光とを交互に行うという第2の条件と、
1つの前記単位露光領域への走査露光を終了した状態から次の前記単位露光領域への走査露光を開始するまでの間に、前記移動体が次の前記単位露光領域に向けた非走査方向へのステップ移動を行うという第3の条件と、
のすべての前記条件を満たし、
前記プロファイル生成方法は、
走査露光している間の前記移動体の加速度の時間関数を示す第1指令情報と、走査露光していない間の加速度の時間関数を示す第2指令情報と、1つの単位露光領域への走査露光を終了した状態から次の単位露光領域への走査露光を開始するまでの時間を示す非露光時間情報と、走査露光している間に前記移動体が走査方向に移動する距離を示す距離情報と、を含む第1情報を設定する工程と、
前記設定された第1情報に基づいて、走査露光している間の時間を示す露光時間情報を含む第2情報を求める工程と、
前記第1情報と前記第2情報とに基づいて、前記露光動作プロファイルを決定する工程と、
を含むことを特徴とするプロファイル生成方法。 - 前記1つの単位露光領域への走査露光を終了した状態から前記次の単位露光領域への走査露光を開始するまでの時間と、前記移動体がステップ移動をしている間の時間とが等しいことを特徴とする請求項1に記載のプロファイル生成方法。
- 前記第1情報は、速度に関する情報を含むことを特徴とする請求項1または2に記載のプロファイル生成方法。
- 前記速度は、走査方向の成分の最高値であることを特徴とする請求項3に記載のプロファイル生成方法。
- 基板を走査させながら、前記原版に形成されているパターンの像を前記基板上に露光する露光装置であって、
前記基板を保持する移動体と、
請求項1ないし4のいずれか1項に記載のプロファイル生成方法を用いて生成された露光動作プロファイルに基づいて前記移動体を制御する制御部と、
を備えることを特徴とする露光装置。 - 請求項5に記載の露光装置を用いて基板を露光する工程と、
その露光した基板を現像する工程と、
を含むことを特徴とするデバイス製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014078876A JP2015201526A (ja) | 2014-04-07 | 2014-04-07 | プロファイル生成方法、露光装置およびデバイス製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014078876A JP2015201526A (ja) | 2014-04-07 | 2014-04-07 | プロファイル生成方法、露光装置およびデバイス製造方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015201526A true JP2015201526A (ja) | 2015-11-12 |
Family
ID=54552549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014078876A Pending JP2015201526A (ja) | 2014-04-07 | 2014-04-07 | プロファイル生成方法、露光装置およびデバイス製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015201526A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101818045B1 (ko) | 2014-05-13 | 2018-01-12 | 캐논 가부시끼가이샤 | 노광장치 및 그 제어방법, 및 디바이스의 제조방법 |
| EP4120022A1 (en) * | 2021-07-13 | 2023-01-18 | Canon Kabushiki Kaisha | Exposure apparatus and method of manufacturing article |
-
2014
- 2014-04-07 JP JP2014078876A patent/JP2015201526A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101818045B1 (ko) | 2014-05-13 | 2018-01-12 | 캐논 가부시끼가이샤 | 노광장치 및 그 제어방법, 및 디바이스의 제조방법 |
| EP4120022A1 (en) * | 2021-07-13 | 2023-01-18 | Canon Kabushiki Kaisha | Exposure apparatus and method of manufacturing article |
| US11762299B2 (en) | 2021-07-13 | 2023-09-19 | Canon Kabushiki Kaisha | Exposure apparatus and method of manufacturing article |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010016166A (ja) | 走査型露光装置および露光方法、ならびにデバイス製造方法 | |
| JP2008300579A (ja) | 露光装置及びデバイス製造方法 | |
| JP2506616B2 (ja) | 露光装置及びそれを用いた回路の製造方法 | |
| US7046336B2 (en) | Scanning exposure apparatus | |
| KR100334852B1 (ko) | 스테이지제어방법, 노광방법, 노광장치 및 디바이스제조방법 | |
| JP2015201526A (ja) | プロファイル生成方法、露光装置およびデバイス製造方法 | |
| JP4322860B2 (ja) | 測定方法、デバイス製造方法およびリソグラフィ装置 | |
| JP3408118B2 (ja) | 投影露光方法および装置 | |
| JP5489534B2 (ja) | 露光装置及びデバイス製造方法 | |
| KR20140016821A (ko) | 노광 방법, 노광 장치, 및 디바이스의 제조 방법 | |
| KR101784045B1 (ko) | 노광 장치 및 물품의 제조 방법 | |
| US20150331327A1 (en) | Exposure apparatus, control method thereof, and device fabrication method | |
| CN107305320B (zh) | 检测装置、检测方法、程序、光刻装置和物品制造方法 | |
| US6630986B2 (en) | Scanning type exposure apparatus and a device manufacturing method using the same | |
| JP2000164506A (ja) | 露光方法および装置 | |
| US11762299B2 (en) | Exposure apparatus and method of manufacturing article | |
| JP7105627B2 (ja) | 露光方法、露光装置、および物品の製造方法 | |
| JP3387581B2 (ja) | 露光装置及び該露光装置を用いてデバイスを製造する方法 | |
| JPH09223662A (ja) | 照明装置、走査型露光装置及びそれらを用いたデバイスの製造方法 | |
| JP2002072491A (ja) | プリント基板製造装置 | |
| JP2005116965A (ja) | 露光装置及びその制御方法 | |
| JP2001244175A (ja) | 露光方法及び露光装置、マスク、並びにデバイス製造方法 | |
| KR20230164566A (ko) | 노광 장치, 노광 방법, 및 물품의 제조 방법 | |
| JP2000294479A (ja) | 走査型露光装置およびデバイス製造方法 | |
| JP2014216362A (ja) | 露光装置、露光方法、およびデバイスの製造方法 |