JP2015123508A - 旋回体を有するロボット - Google Patents
旋回体を有するロボット Download PDFInfo
- Publication number
- JP2015123508A JP2015123508A JP2013267397A JP2013267397A JP2015123508A JP 2015123508 A JP2015123508 A JP 2015123508A JP 2013267397 A JP2013267397 A JP 2013267397A JP 2013267397 A JP2013267397 A JP 2013267397A JP 2015123508 A JP2015123508 A JP 2015123508A
- Authority
- JP
- Japan
- Prior art keywords
- base
- robot
- central axis
- robot arm
- bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
【課題】旋回体に使用される軸受けを小型化することができる、又は軸受けの寿命を延ばすことができるロボットを提供する。
【解決手段】ロボット1は、基台2と、上下に延びた中心軸Lを有する軸受け4を介してこの中心軸Lの周りに回動自在に基台2によって支持される旋回体3と、旋回体3から中心軸Lに対して片側に位置するように延びるロボットアーム10と、基台2から旋回体3に対し、少なくともロボットアーム10の自重により旋回体3に作用する重力モーメントに抗する反力モーメントを作用させるアシスト機構5と、を備えて構成される。アシスト機構5は、旋回体における中心軸Lに対してロボットアーム10が位置する側の部分の下面に設けられた受け構造体6と、この受け構造体6が基台2に接する箇所に設けられ、基台2上を転動する転動機構7とを備えている。
【選択図】 図1
【解決手段】ロボット1は、基台2と、上下に延びた中心軸Lを有する軸受け4を介してこの中心軸Lの周りに回動自在に基台2によって支持される旋回体3と、旋回体3から中心軸Lに対して片側に位置するように延びるロボットアーム10と、基台2から旋回体3に対し、少なくともロボットアーム10の自重により旋回体3に作用する重力モーメントに抗する反力モーメントを作用させるアシスト機構5と、を備えて構成される。アシスト機構5は、旋回体における中心軸Lに対してロボットアーム10が位置する側の部分の下面に設けられた受け構造体6と、この受け構造体6が基台2に接する箇所に設けられ、基台2上を転動する転動機構7とを備えている。
【選択図】 図1
Description
本発明は、産業用のロボットに関し、特に水平面内を旋回する旋回体を有するロボットに関する。
従来から床等に固定される基台と、この基台に支持されて水平面内を旋回する旋回体と、この旋回体を基端部として上向きに延びるように設けられたロボットアームを有する産業用ロボットが知られている(特許文献1参照)。ロボットアームは、複数のアーム部材を相互に回転可能に連結して構成され、各アーム部材にはこのアーム部材を連結部を中心として回転させるサーボモータが接続されている(特許文献2参照)。基台と旋回体の一方には軸体が設けられ、他方にはこの軸体に嵌まって旋回体を滑らかに旋回させる軸受けが設けられている。軸受けは上下に延びた中心軸を有しており、ロボットアームは動作状態においてこの中心軸に対して片側に位置する場合がある。
ロボットアームが中心軸に対して片側に位置する場合は、ロボットアームの自重によって、重力モーメントがロボットアームの基端部である旋回体及び軸受けに加わる。また、各アーム部材が連結部を中心として回転する場合は、このアーム部材の加減速状態による作動モーメントが旋回体及び軸受けに加わる。軸受けがこの重力モーメントと作動モーメントに耐えることができるように、大径の軸受けが使用されることが多い。しかし、この大径の軸受けは高価であり、ロボット全体の製造コストの上昇を招来していた。また、ロボット全体のコスト上昇を防ぐべく、小型の軸受けを使用すると、軸受けの寿命が短くなる問題もある。
本発明は、このような課題を解決するためになされたもので、本発明の目的は、旋回体に使用される軸受けを小型化することができる、又は軸受けの寿命を延ばすことができるロボットを提供することにある。
本発明は、このような課題を解決するためになされたもので、本発明の目的は、旋回体に使用される軸受けを小型化することができる、又は軸受けの寿命を延ばすことができるロボットを提供することにある。
本発明のロボットは、基台と、
上下に延びた中心軸を有する軸受けを介して当該中心軸の周りに回動自在に前記基台によって支持される旋回体と、
前記旋回体から前記中心軸に対して片側に位置するように延びるロボットアームと、
前記基台から前記旋回体に対し、少なくとも前記ロボットアームの自重により当該旋回体に作用する重力モーメントに抗する反力モーメントを作用させるアシスト機構と、を備えて構成される。
上下に延びた中心軸を有する軸受けを介して当該中心軸の周りに回動自在に前記基台によって支持される旋回体と、
前記旋回体から前記中心軸に対して片側に位置するように延びるロボットアームと、
前記基台から前記旋回体に対し、少なくとも前記ロボットアームの自重により当該旋回体に作用する重力モーメントに抗する反力モーメントを作用させるアシスト機構と、を備えて構成される。
本発明の構成に従えば、アシスト機構が、上記重力モーメントに抗する反力モーメントを旋回体に作用させるので、その分、軸受けが旋回体に対して作用させる反力モーメントが減少する。これにより、軸受けの寿命を延ばす、又は軸受けを小型化することができる。
上記発明において、前記アシスト機構は、前記旋回体における前記中心軸に対して前記ロボットアームが位置する側の部分を前記基台に対して相対移動可能に支持する可動支持機構である。また、前記アシスト機構は、前記旋回体における前記中心軸に対して前記ロボットアームが位置する側の部分の下面に受け構造体を設け、前記受け構造体が前記基台に接する箇所には、前記基台上を転動する転動機構が設けられている。
上記構成に従えば、転動機構が基台上を転動することにより、受け構造体と基台との間の摩擦力が軽減される。これにより、旋回体はスムーズに旋回することができる。
上記発明において、前記転動機構は、前記旋回体の回転方向に沿って互いに離間して設けられた少なくとも2つのローラ又はタイヤを備えている。また、前記基台上には、前記転動機構の前記ローラ又はタイヤの回転を案内するレールが設けられ、前記転動機構には前記ローラ又はタイヤが前記レールから脱落することを防ぐ外れ防止部材が設けられている。
上記構成に従えば、外れ防止部材を設けていることにより、ローラ又はタイヤはレール上を安定して回転することが出来る。
上記発明において、前記アシスト機構は、前記旋回体と前記基台との間で、伸縮可能に設けられている。
上記構成に従えば、アシスト機構が伸縮可能に設けられているから、ロボットアームの自重に対する反力が変動しても、該反力をスムーズに受けることができる。即ち、アシスト機構が剛体であれば、反力が変動すると、変動分の反力がアシスト機構に吸収されず、該アシスト機構の損傷等に繋がる虞がある。しかし、アシスト機構を伸縮可能に設けることにより、変動分の反力は吸収され、アシスト機構の損傷等は防止される。また、アシスト機構を伸縮可能に設けることにより、旋回体が回転する際に生じる振動も緩和される。
本発明に係るロボットにあっては、アシスト機構が、上記重力モーメントに抗する反力モーメントを旋回体に作用させるので、その分、軸受けが旋回体に対して作用させる反力モーメントが減少する。これにより、軸受けの寿命を延ばす、又は軸受けを小型化することができる。
(ロボットの第1の実施形態)
以下、本発明の実施形態を図を参照しながら説明する。なお、以下では、全ての図を通じて同一又は相当する要素には同一の参照符号を付してその重複する説明を省略する。また、「上」及び「下」の語は、鉛直方向に沿う上方及び下方を夫々指す。
以下、本発明の実施形態を図を参照しながら説明する。なお、以下では、全ての図を通じて同一又は相当する要素には同一の参照符号を付してその重複する説明を省略する。また、「上」及び「下」の語は、鉛直方向に沿う上方及び下方を夫々指す。
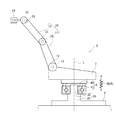
図1は、本発明の実施形態に係るロボットの全体図である。図1に示すように、ロボット1は、例えば、ワークを把持して搬送する産業用ロボットである。しかし、ロボット1は、この用途に限定されない。
ロボット1は、床等に固定される基台2と、基台2から上向きに突出した軸体20と、この軸体20に嵌まる軸受け4を介して中心軸Lの周りに回転自在に基台2に支持される旋回体3と、旋回体3から中心軸Lに対して片側、図1では左側に位置するロボットアーム10とを備えて構成される。旋回体3は基台2内に位置するモータ(図示せず)から減速機構を介して回転駆動力を与えられる。軸受け4は、周知の如く、中心軸Lの周りに互いに回転可能な内輪40と外輪41を備えて構成される。
ロボット1は、床等に固定される基台2と、基台2から上向きに突出した軸体20と、この軸体20に嵌まる軸受け4を介して中心軸Lの周りに回転自在に基台2に支持される旋回体3と、旋回体3から中心軸Lに対して片側、図1では左側に位置するロボットアーム10とを備えて構成される。旋回体3は基台2内に位置するモータ(図示せず)から減速機構を介して回転駆動力を与えられる。軸受け4は、周知の如く、中心軸Lの周りに互いに回転可能な内輪40と外輪41を備えて構成される。
軸体20は大径の第1軸21と、この第1軸21から上向きに突出した小径の第2軸22を一体に設けて構成される。軸受け4は第2軸22に同軸に嵌まり、第1軸21の上面に内輪40の下面が受けられる。軸受け4の外輪41は旋回体3の下端部に接続され、外輪41が内輪40に対して回転することにより、旋回体3は軸体20を中心として水平面内を回転する。
ロボットアーム10は、複数のアーム部材11を相互に回転可能に連結して構成され、各アーム部材11にはこのアーム部材11を連結部12を中心として回転させるモータ13が接続されている。最も先端側に位置するアーム部材11には、ワークを把持する把持部14が設けられている。把持部14がワークを保持した状態にて旋回体3が中心軸Lを中心として回転し、各アーム部材11が連結部12を中心に回転することにより、ワークが所望の位置に搬送される。
ロボットアーム10は、複数のアーム部材11を相互に回転可能に連結して構成され、各アーム部材11にはこのアーム部材11を連結部12を中心として回転させるモータ13が接続されている。最も先端側に位置するアーム部材11には、ワークを把持する把持部14が設けられている。把持部14がワークを保持した状態にて旋回体3が中心軸Lを中心として回転し、各アーム部材11が連結部12を中心に回転することにより、ワークが所望の位置に搬送される。
ロボットアーム10が中心軸Lに対して片側に位置するから、ロボットアーム10の自重によって、図1にて反時計方向の重力モーメントMが旋回体3及び軸受け4に加わる。また、各アーム部材11が連結部12を中心として回転するから、このアーム部材11の加減速状態による反時計方向の作動モーメントが旋回体3及び軸受け4に加わる。軸受け4がこの重力モーメントと作動モーメントの両方に耐えることができるように、本実施形態にあっては軸受け4にはクロスローラ軸受けが使用されている。
図2は、このクロスローラ軸受けである軸受け4の内部構造を示す断面図である。軸受け4は内輪40と外輪41の間に、断面矩形状の溝42を形成し、この溝42に円筒形又は円錐形のコロ43を回転中心軸Sを中心として回転可能に嵌めて構成される。回転中心軸Sは軸受け4の中心軸Lに対して約45°に傾いており、これにより、ロボットアーム10による重力モーメント及び作動モーメント、及び両モーメントに伴うラジアル荷重とスラスト荷重の両方を受けることができる。また、コロ43は溝42の周壁に線接触するから、ボールが点接触して荷重を受ける一般的なボールベアリングに比して大きな荷重を受けることができる。
尚、図2ではコロ43を2つしか図示していないが、実際は軸受け4の周方向に沿って多数配置される。また、コロ43を上下に亘って複数段配置してもよい。更に、軸受け4はクロスローラ軸受けに代えて、アンギュラ玉軸受を上下2段に配置して構成されてもよく、ラジアル荷重とスラスト荷重の両方及びモーメントを受けることができればよい。
尚、図2ではコロ43を2つしか図示していないが、実際は軸受け4の周方向に沿って多数配置される。また、コロ43を上下に亘って複数段配置してもよい。更に、軸受け4はクロスローラ軸受けに代えて、アンギュラ玉軸受を上下2段に配置して構成されてもよく、ラジアル荷重とスラスト荷重の両方及びモーメントを受けることができればよい。
ロボットアーム10による重力モーメント及び作動モーメントは、軸受け4に加わるから、軸受け4にクロスローラ軸受けを使用していても、軸受け4の大型化又は寿命の低下に繋がる。そこで、本実施形態のロボット1にあっては、基台2と旋回体3との間に、重力モーメント及び作動モーメントに抗する反力モーメントを作用させるアシスト機構5を設けている。
図3は、基台とアシスト機構の位置関係を示す平面図であり、図示の便宜上、ロボットアーム10の図示を省略する。図4はこのアシスト機構5を示す正面図、図5は図4をA1方向から見た側面図、図6は図5をB1方向から見た平面図である。図3に示すように、基台2には、環状のレール23が上向きに形成されており、このレール23は中心軸Lと同軸に形成されている。後記の如く、レール23によって旋回体3の旋回が案内される。
図4に示すように、アシスト機構5は、旋回体3において中心軸Lに対してロボットアーム10が位置する側、即ち左側を基台2に対して相対移動可能に支持する可動支持機構である。具体的には、アシスト機構5は、中心軸Lに対して旋回体3の左側下面から下方に延びた受け構造体6と、この受け構造体6が基台2に接する箇所に設けられ、基台2上を転動する転動機構7とを備えて構成される。転動機構7は、受け構造体6の下端部から吊るされて設けられた保持片50内に配置されている。転動機構7は具体的には、ローラ又はタイヤであって、特にタイヤの場合はレール23の上面を転動する際の振動や騒音を抑えることができる効果がある。また、レール23の上面を精度良く平坦に形成することによっても、転動機構7がレール23の上面を転動する際の振動や騒音を抑えることができる。
図4に示すように、アシスト機構5は、旋回体3において中心軸Lに対してロボットアーム10が位置する側、即ち左側を基台2に対して相対移動可能に支持する可動支持機構である。具体的には、アシスト機構5は、中心軸Lに対して旋回体3の左側下面から下方に延びた受け構造体6と、この受け構造体6が基台2に接する箇所に設けられ、基台2上を転動する転動機構7とを備えて構成される。転動機構7は、受け構造体6の下端部から吊るされて設けられた保持片50内に配置されている。転動機構7は具体的には、ローラ又はタイヤであって、特にタイヤの場合はレール23の上面を転動する際の振動や騒音を抑えることができる効果がある。また、レール23の上面を精度良く平坦に形成することによっても、転動機構7がレール23の上面を転動する際の振動や騒音を抑えることができる。
受け構造体6は、重力モーメント及び作動モーメントによって軸受け4が受ける反力の少なくとも一部を吸収するダンパー機構から構成される。このダンパー機構には、例えばバネ機構、油圧機器、及びエアシリンダが挙げられるが、これらに限定されない。ダンパー機構は、前記の重力モーメント及び作動モーメントに抗し、且つ両モーメントに対応した反力モーメントを作用させるものであり、このように反力モーメントを作用させる構成であればよい。
換言すれば、受け構造体6を剛体から形成することも考えられるが、これでは反力モーメントは重力モーメント及び作動モーメントに対応した値、即ち、重力モーメント及び作動モーメントに対して線形の関係となる値にはならない。この結果、反力モーメントが過大になり、却って受け構造体6を損傷させる虞がある。従って、受け構造体6はダンパー機構から構成されるのが好ましい。
換言すれば、受け構造体6を剛体から形成することも考えられるが、これでは反力モーメントは重力モーメント及び作動モーメントに対応した値、即ち、重力モーメント及び作動モーメントに対して線形の関係となる値にはならない。この結果、反力モーメントが過大になり、却って受け構造体6を損傷させる虞がある。従って、受け構造体6はダンパー機構から構成されるのが好ましい。
また、例えば受け構造体6がバネ機構で構成された場合は、図7に示す構成が考えられる。図7に示すように、受け構造体6は旋回体3の下面に取り付けられるハウジング60内に、保持片50に接続されて昇降可能に設けられた可動部材61と、この可動部材61と旋回体3との間に配置されて可動部材61を下向きに付勢する第1バネ62と、可動部材61とハウジング60の底面との間に配置された第2バネ63を備えて構成される。受け構造体6は、ロボットアーム10の重力モーメント及び作動モーメントを受けて、第1及び第2バネ62、63の伸縮によって、両モーメントに対応した反力モーメントを作用させる。このとき、第1又は第2バネ62、63が密着高さ状態とならないように、第1又は第2バネ62、63を設ける必要がある。仮に、ロボットアーム10の重力モーメント及び作動モーメントを受けた際に、第1又は第2バネ62、63が密着高さとなれば、第1又は第2バネ62、63は剛体として作用するから、発生する反力モーメントの値が重力モーメント及び作動モーメントに対して線形の関係である値とはならない。従って、第1又は第2バネ62、63はこの点に留意して設定される。これは受け構造体6をエアシリンダ等で構成した場合も同様である。
図6に示すように、保持片50には、旋回体3の回転方向に開口を互いに反対に向けた2つの切欠き51が形成され、各切欠き51の両側壁に回転中心軸70が架けられるように設けられている。各回転中心軸70に前記の転動機構7が転動可能に嵌まる、即ち2つの転動機構7が旋回体3の回転方向に沿って互いに離間して設けられている。尚、転動機構7は保持片50に3つ以上設けられてもよい。各回転中心軸70は長手方向を仮想線N1に向けており、両仮想線N1の交点は中心軸Lに一致する。前記の如く、レール23は中心軸Lと同軸であるから、転動機構7はレール23の上面全周を転動することができる。即ち、旋回体3はレール23によって旋回を案内される。
尚、旋回体3の旋回範囲は、ロボットアーム10の動作範囲によって決定され、必ずしも、360°回転するとは限らない。この場合は、図3に示すレール23は必ずしも環状に形成される必要はなく、旋回体3の旋回範囲に合わせて平面形状が定められてもよい。
尚、旋回体3の旋回範囲は、ロボットアーム10の動作範囲によって決定され、必ずしも、360°回転するとは限らない。この場合は、図3に示すレール23は必ずしも環状に形成される必要はなく、旋回体3の旋回範囲に合わせて平面形状が定められてもよい。
<転動機構のレールからの脱落防止構成>
しかし、例えばロボット1全体に衝撃荷重が加わった場合は、転動機構7がレール23の上面から脱落する虞がある。これを防ぐために、図4及び図5に示すように、保持片50の下端部には、外れ防止部材52が設けられている。外れ防止部材52は、保持片50から下向きに突出した小軸53と、この小軸53の下端部に回転可能に設けられた小ローラ54とを備えて構成される。小ローラ54は周面がレール23の側面に接しており、旋回体3が回転すると、小ローラ54は小軸53を中心として自転しながら、レール23の側面に沿って中心軸Lを中心として公転する。これにより、転動機構7はレール23から外れることを防止される。尚、図3及び図4では、外れ防止部材52はレール23に対して片側にのみ設けられているが、外れ防止部材52をレール23の両側に設けてもよい。また、外れ防止部材52は転動機構7の回転中心軸70に設けられていてもよい。
しかし、例えばロボット1全体に衝撃荷重が加わった場合は、転動機構7がレール23の上面から脱落する虞がある。これを防ぐために、図4及び図5に示すように、保持片50の下端部には、外れ防止部材52が設けられている。外れ防止部材52は、保持片50から下向きに突出した小軸53と、この小軸53の下端部に回転可能に設けられた小ローラ54とを備えて構成される。小ローラ54は周面がレール23の側面に接しており、旋回体3が回転すると、小ローラ54は小軸53を中心として自転しながら、レール23の側面に沿って中心軸Lを中心として公転する。これにより、転動機構7はレール23から外れることを防止される。尚、図3及び図4では、外れ防止部材52はレール23に対して片側にのみ設けられているが、外れ防止部材52をレール23の両側に設けてもよい。また、外れ防止部材52は転動機構7の回転中心軸70に設けられていてもよい。
把持部14がワークを搬送すべく、旋回体3が中心軸Lの周りを回転すると、ロボットアーム10の重力モーメント及び作動モーメントは、軸受け4に加わる。しかし、転動機構7がレール23の上面全周を転動しながら、受け構造体6は重力モーメント及び作動モーメントに抗し、且つ両モーメントに対応した反力モーメントを作用させる。
これにより、軸受け4が旋回体3に対して作用させる反力モーメントが減少する。軸受け4の負荷を軽減することによって、軸受け4の寿命を延ばす、又は軸受け4を小型化することができる。
これにより、軸受け4が旋回体3に対して作用させる反力モーメントが減少する。軸受け4の負荷を軽減することによって、軸受け4の寿命を延ばす、又は軸受け4を小型化することができる。
本実施形態にあっては、レール23は基台2から上向きに突出しているとしたが、基台2上に凹状に形成されてもよい。この場合、転動機構7がレール23に十分な深さだけ嵌まることができれば、外れ防止部材52は不要となる。また、アシスト機構5は、旋回体3に設けられているとしたが、基台2上に設けられてもよい。但し、この場合は旋回体3の回転範囲に亘って、複数のアシスト機構5を基台2上に設ける必要がある。更に、受け構造体6は旋回体3から下方に延びているとしたが、この受け構造体6は旋回体3内に埋め込んで形成されてもよい。即ち、受け構造体6は旋回体3から下方に突出している必要はない。更に、受け構造体6は重力モーメント及び作動モーメントに対応した反力モーメントを作用させるとしたが、常に一定の反力モーメントを作用させてもよい。
(ロボットの第2の実施形態)
図8は、本発明の他の実施形態に係るロボットの全体図である。図8に示すように、ロボット1は前記と同様に、基台2と、基台2上の軸体20と、軸体20に嵌まる軸受け4を介して中心軸Lの周りに回転自在に基台2に支持される旋回体3と、旋回体3から中心軸Lに対して片側に位置するロボットアーム10とを備えて構成される。但し、図1に示すロボット1と異なり、図8に示すロボット1にあっては、アシスト機構5は中心軸Lに対してロボットアーム10が位置する側と反対側、即ち右側にて、旋回体3と軸受け4の外輪41との間に設けられている。アシスト機構5はこの外輪41を基台2に対して相対移動可能に連結する弾性部材、具体的には引張バネ58にて構成される。即ち、外輪41が本発明の「回動部材」を構成し、引張バネ58が本発明の「連結部材」及び「弾性部材」を構成する。
旋回体3と軸受け4の外輪41との間に引張バネ58を配置することにより、反時計方向の重力モーメント及び作動モーメントに抗する向き、即ち時計方向の反力モーメントを軸受け4に作用させることができる。図8に示す構成によっても、軸受け4に加わる負荷を軽減することによって、軸受け4の寿命を延ばす、又は軸受け4を小型化することができる。尚、アシスト機構5を引張バネ58に代えて、エアシリンダ等から構成してもよい。
図8は、本発明の他の実施形態に係るロボットの全体図である。図8に示すように、ロボット1は前記と同様に、基台2と、基台2上の軸体20と、軸体20に嵌まる軸受け4を介して中心軸Lの周りに回転自在に基台2に支持される旋回体3と、旋回体3から中心軸Lに対して片側に位置するロボットアーム10とを備えて構成される。但し、図1に示すロボット1と異なり、図8に示すロボット1にあっては、アシスト機構5は中心軸Lに対してロボットアーム10が位置する側と反対側、即ち右側にて、旋回体3と軸受け4の外輪41との間に設けられている。アシスト機構5はこの外輪41を基台2に対して相対移動可能に連結する弾性部材、具体的には引張バネ58にて構成される。即ち、外輪41が本発明の「回動部材」を構成し、引張バネ58が本発明の「連結部材」及び「弾性部材」を構成する。
旋回体3と軸受け4の外輪41との間に引張バネ58を配置することにより、反時計方向の重力モーメント及び作動モーメントに抗する向き、即ち時計方向の反力モーメントを軸受け4に作用させることができる。図8に示す構成によっても、軸受け4に加わる負荷を軽減することによって、軸受け4の寿命を延ばす、又は軸受け4を小型化することができる。尚、アシスト機構5を引張バネ58に代えて、エアシリンダ等から構成してもよい。
上記説明から、当業者にとっては、本発明の多くの改良や他の実施形態が明らかである。従って、上記説明は、例示としてのみ解釈されるべきであり、本発明を実行する最良の態様を当業者に教示する目的で提供されたものである。本発明の精神を逸脱することなく、その構造及び/又は機能の詳細を実質的に変更できる。
本発明に係るロボットは、水平面内を旋回する旋回体を有する産業用ロボットに用いると有用である。
1 ロボット
2 基台
3 旋回体
4 軸受け
5 アシスト機構
6 受け構造体
7 転動機構
10 ロボットアーム
52 外れ防止部材
58 引張バネ
2 基台
3 旋回体
4 軸受け
5 アシスト機構
6 受け構造体
7 転動機構
10 ロボットアーム
52 外れ防止部材
58 引張バネ
Claims (11)
- 基台と、
上下に延びた中心軸を有する軸受けを介して当該中心軸の周りに回動自在に前記基台によって支持される旋回体と、
前記旋回体から前記中心軸に対して片側に位置するように延びるロボットアームと、
前記基台から前記旋回体に対し、少なくとも前記ロボットアームの自重により当該旋回体に作用する重力モーメントに抗する反力モーメントを作用させるアシスト機構と、を備えた、ロボット。 - 前記アシスト機構は、前記旋回体における前記中心軸に対して前記ロボットアームが位置する側の部分を前記基台に対して相対移動可能に支持する可動支持機構である、請求項1に記載のロボット。
- 前記アシスト機構は、前記旋回体における前記中心軸に対して前記ロボットアームが位置する側の部分の下面に受け構造体を設け、前記受け構造体が前記基台に接する箇所には、前記基台上を転動する転動機構が設けられた、請求項2に記載のロボット。
- 前記転動機構は、前記旋回体の回転方向に沿って互いに離間して設けられた少なくとも2つのローラ又はタイヤを備える、請求項3に記載のロボット。
- 前記基台上には、前記転動機構の前記ローラ又はタイヤの回転を案内するレールが設けられ、前記転動機構には前記ローラ又はタイヤが前記レールから脱落することを防ぐ外れ防止部材が設けられている、請求項4に記載のロボット。
- 前記アシスト機構は、前記旋回体と前記基台との間で、伸縮可能に設けられた、請求項1乃至5の何れかに記載のロボット。
- 前記アシスト機構は、受ける反力を吸収するダンパー機構を備えている、請求項1乃至6の何れかに記載のロボット。
- 前記ロボットアームは、複数のアーム部材を相互に回転可能に連結して構成され、各アーム部材には該アーム部材を回転させる回転駆動機構が接続されている、請求項1乃至7の何れかに記載のロボット。
- 前記アシスト機構は、前記旋回体における前記中心軸に対して前記ロボットアームが位置する側と反対側の部分を前記基台に対して相対移動可能に連結する可動連結機構である、請求項1に記載のロボット。
- 前記可動連結機構は、前記基台に前記中心軸の周りに回動自在に設けられた回動部材と、当該回動部材と前記旋回体における前記中心軸に対して前記ロボットアームが位置する側と反対側の部分とを連結する連結部材とを備える、請求項9に記載のロボット。
- 前記連結部材は、回動部材と前記旋回体における前記中心軸に対して前記ロボットアームが位置する側と反対側の部分を回動部材に向けて弾性的に付勢する弾性部材である、請求項10に記載のロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013267397A JP2015123508A (ja) | 2013-12-25 | 2013-12-25 | 旋回体を有するロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013267397A JP2015123508A (ja) | 2013-12-25 | 2013-12-25 | 旋回体を有するロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015123508A true JP2015123508A (ja) | 2015-07-06 |
Family
ID=53534631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013267397A Pending JP2015123508A (ja) | 2013-12-25 | 2013-12-25 | 旋回体を有するロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015123508A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107081786A (zh) * | 2016-02-14 | 2017-08-22 | 范红兵 | 一种机器人臂助力装置 |
| CN109771037A (zh) * | 2019-03-22 | 2019-05-21 | 重庆金山医疗机器人有限公司 | 一种机械手立柱回转结构 |
| DE102019106650A1 (de) | 2018-03-20 | 2019-10-02 | Fanuc Corporation | Konstruktion eines Robotergelenks mit Antriebsmotor und Reduziergetriebe |
-
2013
- 2013-12-25 JP JP2013267397A patent/JP2015123508A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107081786A (zh) * | 2016-02-14 | 2017-08-22 | 范红兵 | 一种机器人臂助力装置 |
| DE102019106650A1 (de) | 2018-03-20 | 2019-10-02 | Fanuc Corporation | Konstruktion eines Robotergelenks mit Antriebsmotor und Reduziergetriebe |
| US10906194B2 (en) | 2018-03-20 | 2021-02-02 | Fanuc Corporation | Structure of joint of robot including drive motor and reduction gear |
| CN109771037A (zh) * | 2019-03-22 | 2019-05-21 | 重庆金山医疗机器人有限公司 | 一种机械手立柱回转结构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012002300A (ja) | リニアガイド装置およびこれを備えた電磁緩衝器 | |
| TWI507277B (zh) | Industrial robots | |
| KR101845325B1 (ko) | 3자유도 병렬기구를 구비한 6자유도 볼 구동 로봇 | |
| JP2015123508A (ja) | 旋回体を有するロボット | |
| JP2015037377A (ja) | 電動リニアアクチュエータ及びその電動モータ | |
| JP2011069449A (ja) | リニアアクチュエータ | |
| JPWO2016136608A1 (ja) | 自在キャスター | |
| JP4967036B2 (ja) | 回転直動変換機構及びリフト装置 | |
| JP4697658B2 (ja) | 位置決めテーブル装置 | |
| JP2008185062A (ja) | 荷重支持装置 | |
| CN108890613A (zh) | 一种用于大负载爬壁机器人的驱动轮装置 | |
| JP4648161B2 (ja) | ダブルアーム列式基板搬送用ロボット | |
| US9102474B2 (en) | Rotation mechanism | |
| JP2015123516A (ja) | 産業用ロボット | |
| CN201794924U (zh) | 自动调心球轴承 | |
| EP2505301A1 (en) | Balancer device for machine tools | |
| JPWO2018021178A1 (ja) | 産業用ロボット | |
| CN110588839A (zh) | 一种基于麦克纳姆轮的服务机器人移动底盘 | |
| JP2010242949A (ja) | ボールねじ装置 | |
| JPWO2009107602A1 (ja) | 運動装置 | |
| JP2009168098A (ja) | ボールねじ装置 | |
| JP2006207623A (ja) | 垂直軸支持構造 | |
| JP4628345B2 (ja) | 産業用ロボットの関節構造 | |
| JP6836419B2 (ja) | 駆動輪ユニットおよび自動搬送台車 | |
| JP2021146900A (ja) | サスペンション装置 |