JP2014190807A - 加速度センサ - Google Patents
加速度センサ Download PDFInfo
- Publication number
- JP2014190807A JP2014190807A JP2013066063A JP2013066063A JP2014190807A JP 2014190807 A JP2014190807 A JP 2014190807A JP 2013066063 A JP2013066063 A JP 2013066063A JP 2013066063 A JP2013066063 A JP 2013066063A JP 2014190807 A JP2014190807 A JP 2014190807A
- Authority
- JP
- Japan
- Prior art keywords
- support substrate
- torsion beam
- acceleration
- movable
- lower electrodes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Micromachines (AREA)
- Pressure Sensors (AREA)
Abstract
【課題】支持基板から可動部側に向かう加速度が印加された場合と、可動部から支持基板側に向かう加速度が印加された場合とで、検出範囲が異なることを抑制できる加速度センサを提供する。
【解決手段】可動部20を、可動部20が回転する際の回転軸となると共に支持基板11にアンカー部24を介して支持されたトーション梁23を有する構成とする。そして、トーション梁23に沿った仮想線Lによって分割される一方の部位を第1部位22aとすると共に他方の部位を第2部位22bとしたとき、トーション梁23から第1部位22aのうちトーション梁23から最も離れている端部までの長さL1と、トーション梁23から第2部位22bのうちトーション梁23から最も離れている端部までの長さL2とを等しくし、第2部位22bに切り欠き部22cを形成することにより、第1部位22aの質量より第2部位22bの質量を小さくする。
【選択図】図1
【解決手段】可動部20を、可動部20が回転する際の回転軸となると共に支持基板11にアンカー部24を介して支持されたトーション梁23を有する構成とする。そして、トーション梁23に沿った仮想線Lによって分割される一方の部位を第1部位22aとすると共に他方の部位を第2部位22bとしたとき、トーション梁23から第1部位22aのうちトーション梁23から最も離れている端部までの長さL1と、トーション梁23から第2部位22bのうちトーション梁23から最も離れている端部までの長さL2とを等しくし、第2部位22bに切り欠き部22cを形成することにより、第1部位22aの質量より第2部位22bの質量を小さくする。
【選択図】図1
Description
本発明は、支持基板の面方向に対する法線方向に印加された加速度を検出する加速度センサに関するものである。
従来より、この種の加速度センサとして、例えば、特許文献1に次のような加速度センサが提案されている。
すなわち、この加速度センサでは、支持基板には、支持基板と所定距離だけ離間して配置され、支持基板の面方向に対する法線方向に加速度が印加されると、加速度に応じて回転(シーソ運動)可能な可動部が備えられている。
具体的には、可動部は、内側に開口部が形成された矩形枠状の枠部と、開口部を分割するように枠部に備えられ、可動部が回転する際の回転軸となるトーション梁とを有している。そして、トーション梁がアンカー部を介して支持基板に支持されることによって支持基板に備えられている。また、枠部は、支持基板の面方向に対する加速度が印加されたとき、枠部(可動部)がトーション梁を回転軸として回転することができるように、トーション梁を中心に対して非対称形状とされている。詳述すると、トーション梁で分割される一方の部位を第1部位、他方の部位を第2部位としたとき、トーション梁から第1部位におけるトーション梁側と反対側の端部までの長さ(第1長さ)がトーション梁から第2部位におけるトーション梁側と反対側の端部までの長さ(第2長さ)より長くされている。つまり、枠部は、第1部位の質量が第2部位の質量より大きくされている。
また、支持基板には、第1部位と所定の容量を構成する下部電極および第2部位と所定の容量を構成する下部電極がそれぞれ備えられている。
このような加速度センサでは、支持基板の面方向に対する法線方向に加速度が印加されると、可動部がトーション梁を回転軸として回転するため、可動部と下部電極との間の容量が加速度に応じて変化する。したがって、容量の変化を検出することにより、加速度の検出が行われる。
しかしながら、上記加速度センサでは、枠部は、第1長さが第2長さより長くされている。このため、支持基板から可動部側に向かう加速度が印加された場合と、可動部から支持基板側に向かう加速度が印加された場合とで検出範囲が異なるという問題がある。例えば、支持基板から可動部側に向かう加速度が印加されて第2部位が支持基板側に近づくように回転する場合は、可動部から支持基板側に向かう加速度が印加されて第1部位が支持基板側に近づくように回転する場合と比較として、第1長さが第2長さより長くされているため、検出範囲が狭くなる。
本発明は上記点に鑑みて、支持基板から可動部側に向かう加速度が印加された場合と、可動部から支持基板側に向かう加速度が印加された場合とで、検出範囲が異なることを抑制できる加速度センサを提供することを目的とする。
上記目的を達成するため、請求項1に記載の発明では、支持基板(11)と、支持基板の面方向に対する法線方向に支持基板から離間して配置され、法線方向に加速度が印加されたとき、加速度に応じて回転可能とされた可動部(20)と、支持基板に可動部と対向する状態で配置された下部電極(51〜54)と、を備え、以下の点を特徴としている。
すなわち、可動部は、可動部が回転する際の回転軸となると共に支持基板にアンカー部(24)を介して支持されたトーション梁(23)を有し、トーション梁に沿った仮想線(L)によって分割される一方の部位を第1部位(22a)とすると共に他方の部位を第2部位(22b)としたとき、トーション梁から第1部位のうちトーション梁から最も離れている端部までの長さ(L1)と、トーション梁から第2部位のうちトーション梁から最も離れている端部までの長さ(L2)とが等しくされており、第2部位は、切り欠き部(22c)が形成されることによって第1部位より質量が小さくされていることを特徴としている。
これによれば、支持基板から可動部側に向かう加速度が印加されて第2部位が支持基板に近づくように回転する場合と、可動部側から支持基板側に向かう加速度が印加されて第1部位が支持基板に近づくように回転する場合とで可動部の回転可能範囲を等しくできる。このため、支持基板から可動部側に向かう加速度が印加された場合と可動部から支持基板側に向かう加速度が印加された場合とで検出範囲が異なることを抑制できる。
なお、この欄および特許請求の範囲で記載した各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付して説明を行う。
(第1実施形態)
本発明の第1実施形態について図面を参照しつつ説明する。図1に示されるように、本実施形態の加速度センサは、加速度を検出するセンサ部10が回路部100に接続されて構成されている。まず、センサ部10の構成について説明する。
本発明の第1実施形態について図面を参照しつつ説明する。図1に示されるように、本実施形態の加速度センサは、加速度を検出するセンサ部10が回路部100に接続されて構成されている。まず、センサ部10の構成について説明する。
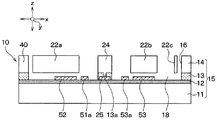
センサ部10は、図1〜図3に示されるように、支持基板11上に第1、第2絶縁膜12、13を介して半導体層14が配置された基板15を用いて構成されている。なお、支持基板11は、例えば、シリコン基板等が用いられ、第1、第2絶縁膜12、13はSiO2やSiN等が用いられ、半導体層14はポリシリコン等が用いられる。
そして、半導体層14には、マイクロマシン加工が施されて第1、第2溝部16、17が形成され、第1溝部16によって可動部20が区画されていると共に、第2溝部17によって接続部31〜35が区画されている。また、半導体層14のうち、第1、第2溝部16、17で区画されていない部分は、周辺部40とされている。
ここで、図1〜図3中のx軸、y軸、z軸の各方向について説明する。図1〜図3中では、x軸方向は図1中紙面左右方向とし、y軸方向は支持基板11の面内においてx軸と直交する方向とし、z軸方向は支持基板11の面方向に対する法線方向としている。
可動部20は、平面矩形状の開口部21が形成された矩形枠状の枠部22と、開口部21の対向辺部を連結するように備えられたトーション梁23とを有している。そして、トーション梁23が第2絶縁膜13に支持されたアンカー部24と連結されることにより、支持基板11に支持されている。
なお、アンカー部24は、支持基板11の中心を通り、y軸方向に延びる延長線上に配置されている。また、第2絶縁膜13のうち枠部22およびトーション梁23と対向する部分は除去されて開口部18とされている。つまり、枠部22は、支持基板11(第1絶縁膜12)からz軸方向に所定距離だけ離間して配置され、支持基板11(第1絶縁膜12)から浮遊した状態で支持基板11に支持されている。
トーション梁23は、z軸方向の加速度が印加されたとき、可動部20の回転中心となる回転軸となる部材であり、本実施形態では開口部21を2分割するように備えられている。
枠部22は、z軸方向の加速度が印加されたとき、トーション梁23を回転軸として回転できるように、トーション梁23を基準として非対称な形状とされている。具体的には、枠部22は、トーション梁23に沿って延びる仮想線Lから枠部22の第1部位22aにおけるトーション梁23から最も離れている部分の端部までのx軸方向の長さL1と、トーション梁から枠部22の第2部位22bにおけるトーション梁23から最も離れている部分の端部までのx軸方向の長さL2とが等しくされている。そして、枠部22は、第2部位22bに枠部22を厚さ方向に貫通する貫通孔22cが形成されることにより、第1部位22aの質量が第2部位22bの質量より大きくされている。つまり、トーション梁23は、可動部20の重心を通り、y軸方向に延びる重心線からx軸方向に平行に移動した線分と一致するように枠部22に備えられているともいえる。
なお、本実施形態では、貫通孔22cが本発明の切り欠き部に相当している。そして、図1中では、枠部22のうちトーション梁23より紙面左側に位置する部分が第1部位22aに相当し、トーション梁23より紙面右側に位置する部分が第2部位22bに相当している。
そして、可動部20は、可動部用配線25を介して接続部31と接続されている。具体的には、可動部用配線25は、第1絶縁膜12のうちアンカー部24の直下に位置する部分から接続部31の直下に位置する部分まで延設された平面矩形状とされている。そして、アンカー部24(可動部20)および接続部31は、第2絶縁膜13に形成されたコンタクトホール13aを介して可動部用配線25と接続されている。
また、第1絶縁膜12のうち第2絶縁膜13が除去された部分であって可動部20と対向する部分には、第1〜第4下部電極51〜54が形成されている。具体的には、可動部20における第1部位22aと対向するように同じ大きさの第1、第2下部電極51、52が配置され、可動部20における第2部位22bと対向するように第1、第2下部電極51、52と同じ大きさの第3、第4下部電極53、54が配置されている。つまり、それぞれ第1、第2部位22a、22bとの間に等しい容量を構成するように第1〜第4下部電極51〜54が配置されている。
なお、本実施形態では、第1〜第4下部電極51〜54は、支持基板11の中心を通る延長線(仮想線L)に対して対称に配置されている。また、支持基板11の中心を通り、x軸およびy軸方向から45°傾いた延長線に対して、第2、第3下部電極52、53が近接し、第1、第4下部電極51、54が離間するように配置されている。
そして、第1〜第4下部電極51〜54は、第1〜第4下部電極用配線51a〜54aを介して接続部32〜35と接続されている。具体的には、第1〜第4下部電極用配線51a〜54aは、第1絶縁膜12上に第1〜第4下部電極51〜54と一体的に形成されると共に、接続部32〜35の直下に位置する部分まで延設されている。そして、接続部32〜35は、それぞれ第2絶縁膜13に形成されたコンタクトホール13aを介して第1〜第4下部電極用配線51a〜54aと接続されている。
また、半導体層14のうち、接続部31〜35および周辺部40にはそれぞれ回路部100と接続されるパッド61〜66が形成されており、各パッド61〜66はワイヤ71〜76を介して回路部100と電気的に接続されている。なお、周辺部40に形成されたパッド66は、周辺部40の電位を固定するために回路部100から所定の電位が印加されるものである。
以上が本実施形態におけるセンサ部10の構成である。次に、上記加速度センサの回路構成について図4を参照しつつ説明する。
図4に示されるように、回路部100には、演算増幅器101、コンデンサ102、スイッチ103によって構成されるC−V変換回路110が備えられている。
具体的には、コンデンサ102およびスイッチ103は、演算増幅器101の反転入力端子と出力端子との間に並列的に配置されている。そして、演算増幅器101は、反転入力端子がパッド61を介して可動部20と電気的に接続され、非反転入力端子にVcc/2(例えば、Vcc=5V)の電圧が入力されるようになっている。
また、第1、第2下部電極51、52には、回路部100から電圧Vccと0Vとの間で振幅し、所定の周波数を有するパルス状の第1搬送波P1がパッド62、63を介して入力されるようになっている。そして、第3、第4下部電極53、54には、回路部100から第1搬送波P1と振幅および周波数が同じであり、位相が180°異なる第2搬送波P2がパッド64、65を介して入力されるようになっている。
なお、図4では、可動部20における第1部位22aと第1下部電極51との間に構成される容量を容量Cs1とし、可動部20における第2部位22bと第4下部電極54との間に構成される容量を容量Cs2として示している。そして、可動部20における第2部位22bと第3下部電極53との間に構成される容量を容量Cs3とし、可動部20における第1部位22aと第2下部電極52との間に構成される容量をCs4として示している。また、以下では、可動部20における第1部位22aと第1下部電極51との間に構成される容量を容量Cs1とし、可動部20における第2部位22bと第4下部電極54との間に構成される容量を容量Cs2として説明する。そして、可動部20における第2部位22bと第3下部電極53との間に構成される容量を容量Cs3とし、可動部20における第1部位22aと第2下部電極52との間に構成される容量をCs4として説明する。また、このような回路部100では、スイッチ103がオフされているときに加速度の検出が行われ、スイッチ103がオン(閉)されているときにコンデンサ102のリセットが行われる。
続いて、上記加速度センサの作動について説明する。上記加速度センサは、第1、第2下部電極51、52に第1搬送波P1が入力され、第3、第4下部電極53、54に第2搬送波P2が入力された状態で加速度の検出が行われる。
そして、例えば、可動部20から支持基板11側に向かうz軸方向の加速度が印加されると、トーション梁23を回転軸として加速度に応じた回転をする。具体的には、第1部位22aが第1、第2下部電極51、52に近付き、第2部位22bが第3、第4下部電極53、54から遠ざかるように可動部20が回転する。このため、容量Cs1〜Cs4は次のように示される。
(数1)Cs1=C0+ΔCa
(数2)Cs2=C0−ΔCa
(数3)Cs3=C0−ΔCa
(数4)Cs4=C0+ΔCa
なお、C0は初期容量であり、ΔCaは加速度に依存する加速度項である。このため、コンデンサ102の容量をCfとすると、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数2)Cs2=C0−ΔCa
(数3)Cs3=C0−ΔCa
(数4)Cs4=C0+ΔCa
なお、C0は初期容量であり、ΔCaは加速度に依存する加速度項である。このため、コンデンサ102の容量をCfとすると、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数5)Vout={(Cs1+Cs4)−(Cs2+Cs3)}・Vcc/Cf
=4ΔCa・Vcc/Cf
また、支持基板11に熱歪みが発生した場合には、容量Cs1〜Cs4にそれぞれ熱歪みに依存する熱歪み項が加算される。しかしながら、本実施形態では、支持基板11の中心を通り、y軸方向に沿って延びる延長線と一致するようにアンカー部24が配置され、当該延長線に対して第1〜第4下部電極51〜54が対称に配置されている。また、支持基板11の中心を通り、x軸およびy軸方向から45°傾いた延長線に対して、第2、第3下部電極52、53が近接し、第1、第4下部電極51、54が離間するように配置されている。このため、熱歪みの影響を低減できる。
=4ΔCa・Vcc/Cf
また、支持基板11に熱歪みが発生した場合には、容量Cs1〜Cs4にそれぞれ熱歪みに依存する熱歪み項が加算される。しかしながら、本実施形態では、支持基板11の中心を通り、y軸方向に沿って延びる延長線と一致するようにアンカー部24が配置され、当該延長線に対して第1〜第4下部電極51〜54が対称に配置されている。また、支持基板11の中心を通り、x軸およびy軸方向から45°傾いた延長線に対して、第2、第3下部電極52、53が近接し、第1、第4下部電極51、54が離間するように配置されている。このため、熱歪みの影響を低減できる。
具体的には、図5に示されるように、アンカー部24(支持基板11の中心)を通り、y軸方向に延びる仮想線K1を中心軸として支持基板11がy軸対称に変形した場合、第1、第2部位22a、22bと第1〜第4下部電極51〜54との間の距離が長くなる。同様に、図6に示されるように、アンカー部24を通り、x軸方向に延びる仮想線K2を中心線として支持基板11がx軸対称に変形した場合、第1部位22aおよび第2部位22bと第1〜第4下部電極51〜54との間の距離が長くなる。このため、容量Cs1〜Cs4は次のように示される。
(数6)Cs1=C0−ΔCt
(数7)Cs2=C0−ΔCt
(数8)Cs3=C0−ΔCt
(数9)Cs4=C0−ΔCt
なお、ΔCtは、歪みに依存する歪み項である。このため、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数7)Cs2=C0−ΔCt
(数8)Cs3=C0−ΔCt
(数9)Cs4=C0−ΔCt
なお、ΔCtは、歪みに依存する歪み項である。このため、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数10)Vout=(Cs1+Cs4)−(Cs2+Cs3)}・Vcc/Cf
=0
また、図7に示されるように、支持基板11の中心を通り、x軸方向およびy軸方向から45°傾いた仮想線K3を中心線として斜め軸対称に変形した場合、仮想線K3の近傍では、第1、第2部位22a、22bと第2、第3下部電極52、53との距離が短くなる。これに対し、仮想線K3から離れた第1、第2部位22a、22bと第1、第4下部電極51、54との間の距離は長くなる。このため、容量Cs1〜Cs4は次のように示される。
=0
また、図7に示されるように、支持基板11の中心を通り、x軸方向およびy軸方向から45°傾いた仮想線K3を中心線として斜め軸対称に変形した場合、仮想線K3の近傍では、第1、第2部位22a、22bと第2、第3下部電極52、53との距離が短くなる。これに対し、仮想線K3から離れた第1、第2部位22a、22bと第1、第4下部電極51、54との間の距離は長くなる。このため、容量Cs1〜Cs4は次のように示される。
(数11)Cs1=C0−nΔCt
(数12)Cs2=C0−nΔCt
(数13)Cs3=C0+ΔCt
(数14)Cs4=C0+ΔCt
なお、nは仮想線K3からの距離に依存する係数である。このため、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数12)Cs2=C0−nΔCt
(数13)Cs3=C0+ΔCt
(数14)Cs4=C0+ΔCt
なお、nは仮想線K3からの距離に依存する係数である。このため、演算増幅器101から出力されるセンサ信号Voutは次式で示される。
(数15)Vout=(Cs1+Cs4)−(Cs2+Cs3)}・Vcc/Cf
=0
つまり、上記加速度センサによれば、支持基板11に熱歪みが発生したとしても、熱歪みの影響を低減したセンサ信号Voutを出力することができる。
=0
つまり、上記加速度センサによれば、支持基板11に熱歪みが発生したとしても、熱歪みの影響を低減したセンサ信号Voutを出力することができる。
次に、上記センサ部10の製造方法について図8を参照しつつ説明する。なお、図8は、図1中のII−II線に沿った断面図である。
まず、図8(a)に示されるように、支持基板11上にCVD(Chemical Vapor Deposition)法等によって第1絶縁膜12を形成する。
続いて、図8(b)に示されるように、第1絶縁膜12上にCVD法等によってポリシリコンや金属膜等を形成する。そして、図示しないマスク等を用いて適宜パターニングすることにより、可動部用配線25、第1〜第4下部電極51〜54、第1〜第4下部電極用配線51a〜54aを形成する。
その後、図8(c)に示されるように、可動部用配線25、第1〜第4下部電極51〜54、第1〜第4下部電極用配線51a〜54aを覆うように、CVD法等によって第2絶縁膜13を形成する。次に、第2絶縁膜13のうちアンカー部24および接続部31〜35と接続される部分と対応する部分にコンタクトホール13aを形成する。
続いて、図8(d)に示されるように、コンタクトホール13aを埋め込みつつ、第2絶縁膜13上にCVD法等で半導体層14を形成することにより、基板15を構成する。そして、半導体層14上にアルミニウム等を蒸着し、マスクを用いてパターニングすることにより、図8とは別断面にパッド61〜66を形成する。
次に、図8(e)に示されるように、図示しないマスクを用いて、半導体層14に第1、第2溝部16、17を形成することにより、可動部20、接続部31〜35、周辺部40を区画形成する。
その後、図8(f)に示されるように、第2絶縁膜13の所定領域を除去して可動部20を支持基板11(第1絶縁膜12)からリリースすることにより、上記センサ部10が形成される。つまり、第2絶縁膜13は、いわゆる犠牲層となるものである。
以上説明したように、本実施形態では、枠部22は、仮想線Lから枠部22の第1部位22aにおけるトーション梁23から最も離れている部分の端部までのx軸方向の長さL1と、トーション梁から枠部22の第2部位22bにおけるトーション梁23から最も離れている部分の端部までのx軸方向の長さL2とが等しくされている。そして、枠部22は、第2部位22bに枠部22を厚さ方向に貫通する貫通孔22cが形成されることにより、第1部位22aの質量が第2部位22bの質量より大きくされている。
このため、支持基板11から可動部20側に向かう加速度が印加されて第2部位22bが支持基板11に近づくように回転する場合と、可動部20側から支持基板11側に向かう加速度が印加されて第1部位22aが支持基板11に近づくように回転する場合とで可動部20の回転可能範囲を等しくできる。したがって、支持基板11から可動部20側に向かう加速度が印加された場合と可動部20から支持基板11側に向かう加速度が印加された場合とにおける検出範囲が異なることを抑制でき、ひいては応答性を等しくできる。
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してキャップ部を備えたものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してキャップ部を備えたものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。
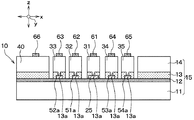
図9および図10に示されるように、本実施形態では、センサ部10にキャップ部200が備えられている。具体的には、キャップ部200は、シリコン基板等で構成され、センサ部10と対向する一面200aのうち可動部20と対向する部分に凹部201が形成されている。そして、センサ部10の周辺部40における接合部40aと接合部材210を介して接合され、可動部20を封止している。
なお、接合部材210は、例えば、酸化膜や低誘電ガラス、金属等が用いられる。そして、接合部材210として金属が用いられる場合には、センサ部10とキャップ部200とを絶縁するための絶縁膜が一面200aに形成される。
これによれば、可動部20に異物が付着することを抑制しつつ、上記第1実施形態と同様の効果を得ることができる。
(他の実施形態)
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。
上記各実施形態において、回路部100には、図11に示されるように、演算増幅器101、第1、第2コンデンサ102a、102b、第1、第2スイッチ103a、103bによって構成される全差動型のC−V変換回路110が備えられていてもよい。この場合、第1コンデンサ102aおよび第1スイッチ103aは、演算増幅器101の反転入力端子と+側の出力端子との間に並列的に配置され、第2コンデンサ102bおよび第2スイッチ103bは、演算増幅器101の非反転入力端子と−側の出力端子との間に並列的に配置される。そして、演算増幅器101は、反転入力端子がパッド62、63を介して第1、第2下部電極51、52と電気的に接続され、非反転入力端子がパッド64、65を介して第3、第4下部電極53、54と電気的に接続される。
また、可動部20には、回路部100から電圧Vccと0Vとの間で振幅し、所定の周波数を有するパルス状の搬送波Pがパッド61を介して入力されるようになっている。
このように、全差動型のC−V変換回路110を用いて容量Cs1〜Cs4を演算することにより、センサ信号Vout(V1−V2)を出力するようにしてもよい。
また、上記各実施形態において、枠部22は矩形枠状でなくてもよい。そして、上記各実施形態において、第2下部電極52および第4下部電極54は備えられていなくてもよい。このような加速度センサとしても、長さL1と長さL2とを等しくし、第2部位22bに枠部22を厚さ方向に貫通する貫通孔22cを形成することにより、検出範囲が異なることを抑制できる。
そして、上記各実施形態において、第2部位22bに複数の貫通孔22cを備えるようにしてもよい。この場合は、第2部位22bの重心を通り、x軸方向に延びる延長線に対して各貫通孔22cが対称に配置されるようにすることが好ましい。また、例えば、第2部位22bに貫通孔22cを形成する変わりに、第2部位22bにおける端部に切り欠き部を形成することにより、第1部位22aの質量が第2部位22bの質量より重くされていてもよい。
11 支持基板
20 可動部
22a 第1部位
22b 第2部位
22c 切り欠き部
23 トーション梁
24 アンカー部
51〜54 下部電極
20 可動部
22a 第1部位
22b 第2部位
22c 切り欠き部
23 トーション梁
24 アンカー部
51〜54 下部電極
Claims (4)
- 支持基板(11)と、
前記支持基板の面方向に対する法線方向に前記支持基板から離間して配置され、前記法線方向に加速度が印加されたとき、加速度に応じて回転可能とされた可動部(20)と、
前記支持基板に前記可動部と対向する状態で配置された下部電極(51〜54)と、を備え、
前記可動部は、前記可動部が回転する際の回転軸となると共に前記支持基板にアンカー部(24)を介して支持されたトーション梁(23)を有し、前記トーション梁に沿った仮想線(L)によって分割される一方の部位を第1部位(22a)とすると共に他方の部位を第2部位(22b)としたとき、前記トーション梁から前記第1部位のうち前記トーション梁から最も離れている端部までの長さ(L1)と、前記トーション梁から前記第2部位のうち前記トーション梁から最も離れている端部までの長さ(L2)とが等しくされており、
前記第2部位は、切り欠き部(22c)が形成されることによって前記第1部位より質量が小さくされていることを特徴とする加速度センサ。 - 前記可動部は、内側に開口部(21)が形成された枠部(22)を有し、前記トーション梁が前記開口部を分割する状態で前記枠部に備えられていることを特徴とする請求項1に記載の加速度センサ。
- 前記支持基板には、前記可動部を覆うキャップ部(200)が備えられていることを特徴とする請求項1または2に記載の加速度センサ。
- 前記支持基板には、前記下部電極として、前記第1部位と対向し、大きさが等しい第1、第2下部電極(51、52)と、前記第2部位と対向し、前記第1、第2下部電極と大きさが等しい第3、第4下部電極(53、54)とが備えられ、
前記第1〜第4下部電極は、前記仮想線に対して対称に配置されており、
前記第1部位と第1、第2下部電極との間の容量の和と、前記第2部位と第3、第4下部電極との間の容量の和との差に基づいて、前記加速度を検出することを特徴とする請求項1ないし3のいずれか1つに記載の加速度センサ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013066063A JP2014190807A (ja) | 2013-03-27 | 2013-03-27 | 加速度センサ |
| PCT/JP2014/001697 WO2014156119A1 (ja) | 2013-03-27 | 2014-03-25 | 物理量センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013066063A JP2014190807A (ja) | 2013-03-27 | 2013-03-27 | 加速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014190807A true JP2014190807A (ja) | 2014-10-06 |
| JP2014190807A5 JP2014190807A5 (ja) | 2015-07-16 |
Family
ID=51837199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013066063A Pending JP2014190807A (ja) | 2013-03-27 | 2013-03-27 | 加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014190807A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109444467A (zh) * | 2018-12-29 | 2019-03-08 | 深迪半导体(上海)有限公司 | 一种共享质量块的三轴电容式加速度计 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09189716A (ja) * | 1995-11-07 | 1997-07-22 | Temic Telefunken Microelectron Gmbh | 超小型機械的加速度センサ |
| JP2010038903A (ja) * | 2008-07-31 | 2010-02-18 | Honeywell Internatl Inc | 閉ループ線形駆動加速度計を用いて面外線形加速度を検出するためのシステムおよび方法 |
| JP2012154919A (ja) * | 2011-01-24 | 2012-08-16 | Freescale Semiconductor Inc | デュアルプルーフマスを有するmemsセンサ |
-
2013
- 2013-03-27 JP JP2013066063A patent/JP2014190807A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09189716A (ja) * | 1995-11-07 | 1997-07-22 | Temic Telefunken Microelectron Gmbh | 超小型機械的加速度センサ |
| JP2010038903A (ja) * | 2008-07-31 | 2010-02-18 | Honeywell Internatl Inc | 閉ループ線形駆動加速度計を用いて面外線形加速度を検出するためのシステムおよび方法 |
| JP2012154919A (ja) * | 2011-01-24 | 2012-08-16 | Freescale Semiconductor Inc | デュアルプルーフマスを有するmemsセンサ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109444467A (zh) * | 2018-12-29 | 2019-03-08 | 深迪半导体(上海)有限公司 | 一种共享质量块的三轴电容式加速度计 |
| CN109444467B (zh) * | 2018-12-29 | 2021-07-06 | 深迪半导体(绍兴)有限公司 | 一种共享质量块的三轴电容式加速度计 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6580804B2 (ja) | Mems圧力センサとmems慣性センサの集積構造 | |
| JP6020392B2 (ja) | 加速度センサ | |
| JP2008292451A (ja) | 酸素吸収剤及び耐膨潤性、耐剥離性及び表面平滑性に優れた脱酸素性容器 | |
| WO2013179647A2 (ja) | 物理量センサ | |
| JP2012168097A (ja) | 複合センサ | |
| JP5967018B2 (ja) | 容量式物理量センサ | |
| US9052334B2 (en) | Acceleration sensor | |
| JP2013181884A (ja) | 静電容量式センサ | |
| JP2014219321A (ja) | 容量式物理量センサおよびその製造方法 | |
| JP5783222B2 (ja) | 加速度センサ | |
| JP5900398B2 (ja) | 加速度センサ | |
| JP2014190807A (ja) | 加速度センサ | |
| JP4965546B2 (ja) | 加速度センサ | |
| WO2014156119A1 (ja) | 物理量センサ | |
| JP2011196966A (ja) | 慣性センサ | |
| JP2008292426A (ja) | 静電容量式センサ | |
| JP6354603B2 (ja) | 加速度センサおよび加速度センサの実装構造 | |
| US20180188028A1 (en) | Single-gap shock-stop structure and methods of manufacture for micro-machined mems devices | |
| JP2012220262A (ja) | 半導体マイクロデバイス | |
| JP5783201B2 (ja) | 容量式物理量センサ | |
| JP2013217844A (ja) | Memsデバイス | |
| WO2015008422A1 (ja) | センサ | |
| JP2011095010A (ja) | 静電容量型センサ | |
| JP4775412B2 (ja) | 半導体物理量センサ | |
| JP2014021188A (ja) | 回転型アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141118 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150623 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151027 |