JP2014129083A - 自動車の車両乗員安全装置を作動させる方法、ならびにこれに対応する車両乗員安全装置 - Google Patents
自動車の車両乗員安全装置を作動させる方法、ならびにこれに対応する車両乗員安全装置 Download PDFInfo
- Publication number
- JP2014129083A JP2014129083A JP2013262174A JP2013262174A JP2014129083A JP 2014129083 A JP2014129083 A JP 2014129083A JP 2013262174 A JP2013262174 A JP 2013262174A JP 2013262174 A JP2013262174 A JP 2013262174A JP 2014129083 A JP2014129083 A JP 2014129083A
- Authority
- JP
- Japan
- Prior art keywords
- collision
- acceleration
- determined
- sensor
- limit value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 23
- 230000001133 acceleration Effects 0.000 claims abstract description 56
- 238000005259 measurement Methods 0.000 claims description 21
- 230000007704 transition Effects 0.000 description 18
- 230000008901 benefit Effects 0.000 description 4
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000006261 foam material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009469 supplementation Effects 0.000 description 1
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0136—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to actual contact with an obstacle, e.g. to vehicle deformation, bumper displacement or bumper velocity relative to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0004—Frontal collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0009—Oblique collision
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Air Bags (AREA)
Abstract
【解決手段】加速度センサによって加速度が判定され、加速度から決定される加速度量が限界値を超過すると少なくとも1つの安全措置が開始される。このとき、限界値は衝突センサ装置により判定される衝突位置量に依存して決定されることが意図される。
【選択図】図2
Description
(pl−pr)/(pl+pr)>f(t)
が成り立つ。ここでplは左側の圧力センサの測定値を表しており、prは右側の圧力センサの測定値を表している。量f(t)は、時間に依存して、特に時間検出器により計測された時間に依存して、変化する閾値である。この閾値が超過されると、すでに上で説明したとおり、非対称の衝突の発生が推定されて、限界値が相応に適合調節される。このような方式は、閾値を時間に対して変更しなくてよく、もしくはわずかしか変更しなくてよいという利点がある。両方の測定値の間の差異の増大が、少なくとも1つの測定値の増大によって少なくとも部分的に補償されるからである。
(pl−pr)>f(t,pl,pr)
を導き出すことができる。すなわち非対称の衝突が認識されるのは、測定値の間の差異が、個々の測定値に依存する、および任意選択で時間に依存する閾値を超えたときである。特殊事例として、平均値に対する依存性についてはすでに説明した。
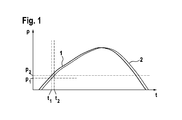
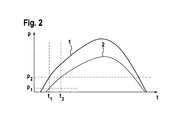
2 第2の圧力センサの測定値の推移
Claims (10)
- 自動車の主走行方向でアライメントされた加速度センサと、圧力感応式の衝突センサ装置とを有する、自動車の車両乗員安全装置を作動させる方法であって、前記加速度センサによって加速度が判定され、加速度から決定される加速度量が限界値を超過すると少なくとも1つの安全措置が開始される、そのような方法において、前記限界値は前記衝突センサ装置により判定される衝突位置量に依存して決定されることを特徴とする方法。
- 前記衝突センサ装置は複数のセンサを備えており、該センサがそれぞれ測定値を提供し、該センサを用いて衝突位置量が決定されることを特徴とする、請求項1に記載の方法。
- 衝突位置量に対応する衝突位置が自動車の縦中心軸から遠く外れているほど、定義された基本限界値を起点として前記限界値がいっそう大きく引き下げられることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 前記センサとして圧力センサが使用されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 前記限界値は、少なくとも2つの測定値またはこれらに対応する値から判定される、衝突位置量と対応する差異量に依存して決定されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 前記差異量として時間差または数値差が援用されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 前記時間差として、前記センサの測定値によって、またはこれらに対応する値によって、同一の限界値が到達または超過されたそれぞれの時点の間の時間間隔が利用されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 前記数値差として、特定の時点における測定値またはこれに対応する値の間の差異が利用されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 最大または最小の測定値により、または測定値の平均値により、数値差が正規化されることを特徴とする、先行請求項のうちいずれか1項に記載の方法。
- 先行請求項のうちいずれか1項または複数項に記載の方法を実施するための自動車の車両乗員安全装置であって、前記車両乗員安全装置は、自動車の主走行方向でアライメントされた加速度センサと、圧力感応式の衝突センサ装置とを有しており、前記加速度センサによって加速度を判定するとともに、加速度から決定される加速度量が限界値を超過すると少なくとも1つの安全措置を開始するように構成されている、そのような車両乗員安全装置において、
さらに前記車両乗員安全装置は、前記衝突センサ装置により判定される衝突位置量に依存して限界値を決定するように構成されていることを特徴とする車両乗員安全装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012224451.4 | 2012-12-27 | ||
| DE102012224451.4A DE102012224451B4 (de) | 2012-12-27 | 2012-12-27 | Verfahren zum Betreiben einer Fahrzeuginsassensicherheitseinrichtung eines Kraftfahrzeug sowie entsprechende Fahrzeuginsassensicherheitseinrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014129083A true JP2014129083A (ja) | 2014-07-10 |
| JP6391240B2 JP6391240B2 (ja) | 2018-09-19 |
Family
ID=49767592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013262174A Active JP6391240B2 (ja) | 2012-12-27 | 2013-12-19 | 自動車の車両乗員安全装置を作動させる方法、ならびにこれに対応する車両乗員安全装置 |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP6391240B2 (ja) |
| CN (1) | CN103895598B (ja) |
| DE (1) | DE102012224451B4 (ja) |
| FR (1) | FR3000448B1 (ja) |
| GB (1) | GB2510222B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105654752A (zh) * | 2016-04-06 | 2016-06-08 | 河南理工大学 | 一种用于多个车辆的汽车行驶安全预警装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013212141B4 (de) | 2013-06-25 | 2022-06-23 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugsicherheitssystems, Computer-Programmprodukt |
| CN109070825B (zh) * | 2016-03-15 | 2021-08-31 | 福特全球技术公司 | 使用车辆动力学来确定撞击位置 |
| CN106027865B (zh) * | 2016-06-14 | 2022-04-26 | 北京钛方科技有限责任公司 | 一种车辆触发碰撞报警和记录的装置及其检测方法 |
| DE102017217013A1 (de) * | 2017-09-26 | 2019-03-28 | Robert Bosch Gmbh | Verfahren zur Erzeugung eines Auslösesignals zum Auslösen mindestens einer Sicherheitsfunktion eines Kraftfahrzeugs |
| KR20220014436A (ko) | 2020-07-27 | 2022-02-07 | 현대자동차주식회사 | 자율 주행 제어 장치 및 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11286257A (ja) * | 1998-04-02 | 1999-10-19 | Toyota Motor Corp | 乗員保護装置の起動制御装置 |
| JPH11310095A (ja) * | 1998-02-24 | 1999-11-09 | Toyota Central Res & Dev Lab Inc | 車両用衝突判別装置 |
| JP2004003938A (ja) * | 2002-04-03 | 2004-01-08 | Takata Corp | 衝突検出装置及び安全装置 |
| JP2004196239A (ja) * | 2002-12-20 | 2004-07-15 | Denso Corp | 車両用衝突体判別装置 |
| JP2010064605A (ja) * | 2008-09-10 | 2010-03-25 | Denso Corp | 車両用衝突検知装置 |
| US20120078499A1 (en) * | 2010-09-27 | 2012-03-29 | Robert Bosch Gmbh | Impact sensing and identification system for pedestrian protection device |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3333813B2 (ja) * | 1996-11-20 | 2002-10-15 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| US6198387B1 (en) * | 1998-11-09 | 2001-03-06 | Delphi Technologies, Inc. | Restraint deployment control with central and frontal crash sensing |
| DE10018985A1 (de) | 2000-04-17 | 2001-10-18 | Delphi Tech Inc | Anordnung und Verfahren zur Steuerung der Auslösung eines Luftsacks |
| JP3487279B2 (ja) * | 2000-10-02 | 2004-01-13 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| DE10357352A1 (de) | 2003-12-09 | 2005-07-07 | Robert Bosch Gmbh | Vorrichtung zur Ansteuerung von Personenschutzmitteln |
| DE102004031575A1 (de) * | 2004-06-29 | 2006-02-02 | Daimlerchrysler Ag | Aufprallerfassungseinrichtung für ein Kraftfahrzeug |
| DE102005000657A1 (de) * | 2005-01-04 | 2006-07-13 | Robert Bosch Gmbh | Verfahren zur Offseterkennung für eine Fußgängerschutzvorrichtung |
| DE102005046928A1 (de) | 2005-09-30 | 2007-04-12 | Siemens Ag | Vorrichtung und Verfahren zur Lokalisierung einer Kollision eines Objektes an einem Kraftfahrzeug |
| DE102006001366B4 (de) * | 2006-01-11 | 2019-03-07 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Detektion eines Fußgängeraufpralls |
| DE102006042769C5 (de) | 2006-09-12 | 2011-07-28 | Continental Automotive GmbH, 30165 | Verfahren und Vorrichtung zum Auslösen eines Personenschutzmittels für ein Fahrzeug |
| JP2013154838A (ja) * | 2012-01-31 | 2013-08-15 | Daihatsu Motor Co Ltd | 乗員保護制御装置 |
| US9975510B2 (en) * | 2012-05-22 | 2018-05-22 | Trw Automotive U.S. Llc | Hybrid vehicle/pedestrian impact detecting method and apparatus |
| DE112012006407B4 (de) | 2012-05-22 | 2020-06-04 | Trw Automotive U.S. Llc | Vorrichtung und Verfahren zum Detektieren eines Fahrzeug/Fußgängeraufpralls |
-
2012
- 2012-12-27 DE DE102012224451.4A patent/DE102012224451B4/de active Active
-
2013
- 2013-11-01 GB GB1319410.5A patent/GB2510222B/en active Active
- 2013-12-19 JP JP2013262174A patent/JP6391240B2/ja active Active
- 2013-12-20 FR FR1363184A patent/FR3000448B1/fr active Active
- 2013-12-27 CN CN201310740902.4A patent/CN103895598B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11310095A (ja) * | 1998-02-24 | 1999-11-09 | Toyota Central Res & Dev Lab Inc | 車両用衝突判別装置 |
| JPH11286257A (ja) * | 1998-04-02 | 1999-10-19 | Toyota Motor Corp | 乗員保護装置の起動制御装置 |
| JP2004003938A (ja) * | 2002-04-03 | 2004-01-08 | Takata Corp | 衝突検出装置及び安全装置 |
| JP2004196239A (ja) * | 2002-12-20 | 2004-07-15 | Denso Corp | 車両用衝突体判別装置 |
| JP2010064605A (ja) * | 2008-09-10 | 2010-03-25 | Denso Corp | 車両用衝突検知装置 |
| US20120078499A1 (en) * | 2010-09-27 | 2012-03-29 | Robert Bosch Gmbh | Impact sensing and identification system for pedestrian protection device |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105654752A (zh) * | 2016-04-06 | 2016-06-08 | 河南理工大学 | 一种用于多个车辆的汽车行驶安全预警装置 |
| CN105654752B (zh) * | 2016-04-06 | 2018-06-29 | 河南理工大学 | 一种用于多个车辆的汽车行驶安全预警装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3000448B1 (fr) | 2018-07-27 |
| DE102012224451A1 (de) | 2014-07-03 |
| GB2510222B (en) | 2017-08-30 |
| FR3000448A1 (fr) | 2014-07-04 |
| CN103895598B (zh) | 2018-04-13 |
| DE102012224451B4 (de) | 2023-09-28 |
| GB201319410D0 (en) | 2013-12-18 |
| GB2510222A (en) | 2014-07-30 |
| CN103895598A (zh) | 2014-07-02 |
| JP6391240B2 (ja) | 2018-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6391240B2 (ja) | 自動車の車両乗員安全装置を作動させる方法、ならびにこれに対応する車両乗員安全装置 | |
| CN106256613B (zh) | 用于控制车辆人员保护设备触发的方法、设备及安全系统 | |
| JP5146542B2 (ja) | 走行路推定装置、及び当該装置で用いられる走行路推定方法 | |
| JP4878370B2 (ja) | 乗員保護装置のためのロール角算出の方法および装置 | |
| JP4612690B2 (ja) | 歩行者保護装置のためのオフセット検出方法 | |
| KR20190124118A (ko) | 차량의 안전 전략 제공 장치 및 방법 | |
| CN108216100A (zh) | 在机动车中用于行人保护的方法和设备 | |
| KR101338062B1 (ko) | 차량의 프리크래쉬 작동장치 및 작동방법 | |
| US7835865B2 (en) | Obstacle detecting control device of vehicle | |
| CN111132875B (zh) | 产生用于触发机动车的至少一个安全功能的触发信号的方法 | |
| US20070185632A1 (en) | Method and device for detecting a rollover situation of a motor vehicle | |
| US20150367799A1 (en) | Collision sensing apparatus | |
| KR20120063626A (ko) | 외장에어백의 제어장치 및 제어방법 | |
| KR20180006635A (ko) | 교차로 충돌 회피 시스템 및 그 제어 방법 | |
| JP2007509793A (ja) | 車両ヨー軸回りの車両の回転中心を求める装置 | |
| US20090216409A1 (en) | Method and Device for Determining an Initial Float for Skid Detection in Rollover Sensing | |
| JP2006341843A (ja) | 衝突事件の類別方法 | |
| US20160075294A1 (en) | Device for controlling personal protection in a vehicle | |
| JP2007118831A (ja) | 車両用衝突物体判別装置及び歩行者保護装置作動システム | |
| US9475442B2 (en) | Method and device for triggering at least one passenger protection means of a vehicle | |
| WO2017014081A1 (ja) | 傷害判定装置 | |
| KR101244475B1 (ko) | 주차 제어 방법 및 시스템 | |
| JP6698264B2 (ja) | 車両用衝突評価方法および装置ならびにコンピュータプログラム | |
| KR101360342B1 (ko) | 차량의 충돌 감지 시스템의 동작방법 | |
| JP2008528377A (ja) | セーフティシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170929 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180301 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180725 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180821 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6391240 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |