JP2014061057A - 情報処理装置、情報処理方法、プログラム、及び測定システム - Google Patents
情報処理装置、情報処理方法、プログラム、及び測定システム Download PDFInfo
- Publication number
- JP2014061057A JP2014061057A JP2012206838A JP2012206838A JP2014061057A JP 2014061057 A JP2014061057 A JP 2014061057A JP 2012206838 A JP2012206838 A JP 2012206838A JP 2012206838 A JP2012206838 A JP 2012206838A JP 2014061057 A JP2014061057 A JP 2014061057A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- measurement
- marker
- subject
- information processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0077—Devices for viewing the surface of the body, e.g. camera, magnifying lens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/064—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/44—Detecting, measuring or recording for evaluating the integumentary system, e.g. skin, hair or nails
- A61B5/441—Skin evaluation, e.g. for skin disorder diagnosis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
- G06T1/60—Memory management
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
- A61B5/743—Displaying an image simultaneously with additional graphical information, e.g. symbols, charts, function plots
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30088—Skin; Dermal
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
Abstract
【解決手段】撮像部は、接近した状態で被写体の一部を測定する測定器21に設けられたLED21bを、被写体とともに撮像し、位置算出部62は、撮像部による撮像で得られる撮像画像に基づいて、被写体に対するLED21bの位置を表すマーカ位置を算出し、出力制御部64は、マーカ位置が、被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う。本開示は、例えば、被写体とともに、測定器21のLED21bを撮像する撮像部を有するスマートフォン22などに適用できる。
【選択図】図2
Description
1.第1の実施の形態(LED位置が測定位置と一致した場合、その旨を報知するときの一例)
2.第2の実施の形態(LEDの点滅パターンに応じて、測定器の状態を表示するときの一例)
3.第3の実施の形態(LED位置が測定位置と一致した場合、測定を行わせるときの一例)
4.変形例
[測定システム1の構成例]
図1は、本開示における測定システム1の構成例を示している。
次に、図3のフローチャートを参照して、図2のスマートフォン22が行う報知処理について説明する。
[スマートフォン22の構成例]
次に、図4は、状態表示が重畳された撮像画像を表示できるようにしたスマートフォン22の構成例を示している。
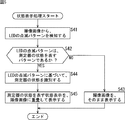
次に、図5のフローチャートを参照して、図4のスマートフォン22が行う状態表示処理について説明する。
[スマートフォン22の構成例]
次に、図6は、測定器21を制御して、肌データの測定を行わせるようにしたスマートフォン22の構成例を示している。
次に、図7のフローチャートを参照して、図6のスマートフォン22が行う測定制御処理について説明する。
次に、図9のフローチャートを参照して、図6のスマートフォン22が、肌画像121a乃至121iを合成して全体肌画像121'を生成する画像合成処理を説明する。
[測定器21の変形例]
測定器21は、肌データの測定として、内蔵のカメラ21aを用いた肌画像の撮像を行うようにした。
次に、図13は、測定器21'及びスマートフォン22を、拡大鏡として用いるようにしたときの一例を示している。
(1)接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部と、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
を含む情報処理装置。
(2)前記マーカは、点灯又は消灯することにより、予め決められた点滅パターンで点滅する発光部であり、
前記撮像画像内の前記マーカの点灯又は消灯に基づいて、前記マーカの点滅パターンを検知するパターン検知部を
さらに含む前記(1)に記載の情報処理装置。
(3)前記マーカは、前記測定器の状態を表す前記点滅パターンで点滅し、
前記パターン検知部の検知結果に基づいて、前記測定器の状態を表示部に表示させる表示制御部を
さらに含む前記(2)に記載の情報処理装置。
(4)前記制御部は、前記マーカ位置が、前記測定器が移動する軌跡上の各測定位置と一致する毎に、予め決められた制御処理を行う
前記(1)乃至(3)に記載の情報処理装置。
(5)前記制御部は、前記マーカ位置が前記測定位置と一致した場合、その旨をユーザに報知させる第1の前記制御処理、又は前記測定器を制御して、前記測定器に前記被写体の一部を測定させる第2の前記制御処理の少なくとも一方を行う
前記(1)乃至(4)に記載の情報処理装置。
(6)前記測定器の傾きを識別する傾き識別部を
さらに含む前記(1)乃至(5)に記載の情報処理装置。
(7)前記測定器は、前記測定器の動きをセンシングするセンサを有し、
前記傾き識別部は、前記センサのセンシング結果に基づいて、前記測定器の傾きを識別する
前記(6)に記載の情報処理装置。
(8)前記マーカは、前記測定器の筐体に設けられた図形であり、
前記傾き識別部は、前記撮像画像内の前記図形の形状に基づいて、前記測定器の傾きを識別する
前記(6)に記載の情報処理装置。
(9)前記測定器は、接近した状態で撮像を行うことにより、前記被写体の肌を測定し、
前記測定器の撮像により得られた複数の肌画像に基づいて、前記複数の肌画像をつなぎ合わせた全体肌画像を生成する生成部を
さらに含む前記(1)乃至(5)に記載の情報処理装置。
(10)前記測定位置までの距離を測定する距離測定部と、
前記測定位置と前記距離に基づいて、前記肌画像の3次元位置を算出する3次元位置算出部と
をさらに含み、
前記生成部は、複数の前記肌画像の3次元位置にも基づいて、前記被写体の肌を立体的に表示する前記全体肌画像を生成する
をさらに含む前記(9)に記載の情報処理装置。
(11)前記測定器は、
前記被写体の一部に対して、複数の異なる波長の光を照射する照射部と、
複数の異なる波長毎に、前記波長の光が照射されているときの肌の撮像を行うことにより、前記被写体の一部を測定するカメラ測定部と
を有する
前記(1)乃至(5)に記載の情報処理装置。
(12)前記測定器は、前記情報処理装置に着脱自在とされる
前記1乃至5に記載の情報処理装置。
(13)前記測定器は、前記情報処理装置に装着された状態で充電可能とされる
前記(12)に記載の情報処理装置。
(14)前記測定器は、
前記被写体の一部を接写するカメラ測定部と、
前記カメラ測定部を囲む筒状の形状を有し、前記被写体の一部に押し当てられたときにオン状態とされる鏡筒部と、
ユーザの回転操作に応じて、前記カメラ測定部の光軸を中心として回転される回転部と
を有する前記(1)乃至(5)に記載の情報処理装置。
(15)前記カメラ測定部は、前記鏡筒部がオン状態とされたときに、前記被写体の一部を接写し、
前記回転部は、前記カメラ測定部の動作に関する動作モードを切り替える際に、前記カメラ測定部の光軸を中心として回転される
前記(14)に記載の情報処理装置。
(16)接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部を有する情報処理装置の情報処理方法において、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出ステップと、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御ステップと
を含む情報処理方法。
(17)接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部を有する情報処理装置のコンピュータを、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
して機能させるためのプログラム。
(18)ユーザに接近した状態で測定を行う測定器と、前記ユーザ及び前記測定器を撮像する撮像部を有する情報処理装置から構成される測定システムにおいて、
前記測定器は、
接近した状態でユーザの一部を測定する測定部と、
前記測定器の筐体に設けられたマーカと
を有し、
前記情報処理装置は、
前記測定器に設けられた前記マーカを、前記ユーザとともに撮像する撮像部と、
前記撮像部による撮像で得られる撮像画像に基づいて、前記ユーザに対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記ユーザの一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
を有する
測定システム。
図15は、上述した一連の処理をプログラムにより実行するコンピュータのハードウェアの構成例を示している。
Claims (18)
- 接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部と、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
を含む情報処理装置。 - 前記マーカは、点灯又は消灯することにより、予め決められた点滅パターンで点滅する発光部であり、
前記撮像画像内の前記マーカの点灯又は消灯に基づいて、前記マーカの点滅パターンを検知するパターン検知部を
さらに含む請求項1に記載の情報処理装置。 - 前記マーカは、前記測定器の状態を表す前記点滅パターンで点滅し、
前記パターン検知部の検知結果に基づいて、前記測定器の状態を表示部に表示させる表示制御部を
さらに含む請求項2に記載の情報処理装置。 - 前記制御部は、前記マーカ位置が、前記測定器が移動する軌跡上の各測定位置と一致する毎に、予め決められた制御処理を行う
請求項1に記載の情報処理装置。 - 前記制御部は、前記マーカ位置が前記測定位置と一致した場合、その旨をユーザに報知させる第1の前記制御処理、又は前記測定器を制御して、前記測定器に前記被写体の一部を測定させる第2の前記制御処理の少なくとも一方を行う
請求項1に記載の情報処理装置。 - 前記測定器の傾きを識別する傾き識別部を
さらに含む請求項1に記載の情報処理装置。 - 前記測定器は、前記測定器の動きをセンシングするセンサを有し、
前記傾き識別部は、前記センサのセンシング結果に基づいて、前記測定器の傾きを識別する
請求項6に記載の情報処理装置。 - 前記マーカは、前記測定器の筐体に設けられた図形であり、
前記傾き識別部は、前記撮像画像内の前記図形の形状に基づいて、前記測定器の傾きを識別する
請求項6に記載の情報処理装置。 - 前記測定器は、接近した状態で撮像を行うことにより、前記被写体の肌を測定し、
前記測定器の撮像により得られた複数の肌画像に基づいて、前記複数の肌画像をつなぎ合わせた全体肌画像を生成する生成部を
さらに含む請求項1に記載の情報処理装置。 - 前記測定位置までの距離を測定する距離測定部と、
前記測定位置と前記距離に基づいて、前記肌画像の3次元位置を算出する3次元位置算出部と
をさらに含み、
前記生成部は、複数の前記肌画像の3次元位置にも基づいて、前記被写体の肌を立体的に表示する前記全体肌画像を生成する
をさらに含む請求項9に記載の情報処理装置。 - 前記測定器は、
前記被写体の一部に対して、複数の異なる波長の光を照射する照射部と、
複数の異なる波長毎に、前記波長の光が照射されているときの肌の撮像を行うことにより、前記被写体の一部を測定するカメラ測定部と
を有する
請求項1に記載の情報処理装置。 - 前記測定器は、前記情報処理装置に着脱自在とされる
請求項1に記載の情報処理装置。 - 前記測定器は、前記情報処理装置に装着された状態で充電可能とされる
請求項12に記載の情報処理装置。 - 前記測定器は、
前記被写体の一部を接写するカメラ測定部と、
前記カメラ測定部を囲む筒状の形状を有し、前記被写体の一部に押し当てられたときにオン状態とされる鏡筒部と、
ユーザの回転操作に応じて、前記カメラ測定部の光軸を中心として回転される回転部と
を有する請求項1に記載の情報処理装置。 - 前記カメラ測定部は、前記鏡筒部がオン状態とされたときに、前記被写体の一部を接写し、
前記回転部は、前記カメラ測定部の動作に関する動作モードを切り替える際に、前記カメラ測定部の光軸を中心として回転される
請求項14に記載の情報処理装置。 - 接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部を有する情報処理装置の情報処理方法において、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出ステップと、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御ステップと
を含む情報処理方法。 - 接近した状態で被写体の一部を測定する測定器に設けられたマーカを、前記被写体とともに撮像する撮像部を有する情報処理装置のコンピュータを、
前記撮像部による撮像で得られる撮像画像に基づいて、前記被写体に対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記被写体の一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
して機能させるためのプログラム。 - ユーザに接近した状態で測定を行う測定器と、前記ユーザ及び前記測定器を撮像する撮像部を有する情報処理装置から構成される測定システムにおいて、
前記測定器は、
接近した状態でユーザの一部を測定する測定部と、
前記測定器の筐体に設けられたマーカと
を有し、
前記情報処理装置は、
前記測定器に設けられた前記マーカを、前記ユーザとともに撮像する撮像部と、
前記撮像部による撮像で得られる撮像画像に基づいて、前記ユーザに対する前記マーカの位置を表すマーカ位置を算出する位置算出部と、
前記マーカ位置が、前記ユーザの一部を測定するときのマーカ位置である測定位置と一致した場合、予め決められた制御処理を行う制御部と
を有する
測定システム。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012206838A JP2014061057A (ja) | 2012-09-20 | 2012-09-20 | 情報処理装置、情報処理方法、プログラム、及び測定システム |
| KR1020157006301A KR102200740B1 (ko) | 2012-09-20 | 2013-09-13 | 정보 처리 장치, 정보 처리 방법, 프로그램, 및 측정 시스템 |
| PCT/JP2013/005447 WO2014045558A1 (en) | 2012-09-20 | 2013-09-13 | Information processing apparatus, information processing method, program, and measuring system |
| US14/427,757 US9646378B2 (en) | 2012-09-20 | 2013-09-13 | Information processing apparatus, information processing method, program, and measuring system |
| CN201380047763.5A CN104684461B (zh) | 2012-09-20 | 2013-09-13 | 信息处理装置、信息处理方法、程序和测量系统 |
| TW102133981A TWI590804B (zh) | 2012-09-20 | 2013-09-18 | 資訊處理裝置,資訊處理方法,程式,以及測量系統 |
| US15/474,575 US10026172B2 (en) | 2012-09-20 | 2017-03-30 | Information processing apparatus, information processing method, program, and measuring system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012206838A JP2014061057A (ja) | 2012-09-20 | 2012-09-20 | 情報処理装置、情報処理方法、プログラム、及び測定システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016236707A Division JP6256779B2 (ja) | 2016-12-06 | 2016-12-06 | 情報処理装置、情報処理方法、プログラム、及び測定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014061057A true JP2014061057A (ja) | 2014-04-10 |
| JP2014061057A5 JP2014061057A5 (ja) | 2015-04-09 |
Family
ID=49293807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012206838A Pending JP2014061057A (ja) | 2012-09-20 | 2012-09-20 | 情報処理装置、情報処理方法、プログラム、及び測定システム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US9646378B2 (ja) |
| JP (1) | JP2014061057A (ja) |
| KR (1) | KR102200740B1 (ja) |
| CN (1) | CN104684461B (ja) |
| TW (1) | TWI590804B (ja) |
| WO (1) | WO2014045558A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2016076140A1 (ja) * | 2014-11-14 | 2017-08-24 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| JP2020516355A (ja) * | 2017-04-06 | 2020-06-11 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ウェアラブルデバイスの配置のための案内を与えるための方法及び装置 |
| WO2022114103A1 (ja) * | 2020-11-26 | 2022-06-02 | マクセル株式会社 | 肌状態測定システム |
| WO2022191269A1 (ja) * | 2021-03-10 | 2022-09-15 | マクセル株式会社 | 肌状態測定システム |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150097946A1 (en) * | 2013-10-03 | 2015-04-09 | Jigabot, Llc | Emitter device and operating methods |
| CN106464845B (zh) * | 2014-05-15 | 2020-05-19 | 科洛普拉斯特公司 | 用于捕捉并数字地存储伤口、瘘管、或造口部位的图像的方法和装置 |
| EP3215219B1 (en) * | 2014-11-06 | 2024-01-10 | Koninklijke Philips N.V. | Skin treatment system |
| SI3262443T1 (sl) * | 2015-02-26 | 2023-10-30 | Bruel & Kjaer Sound & Vibration Measurement A/S | Metoda zaznavanja prostorske orientacije pretvornika z eno ali več značilnostmi prostorske orientacije |
| TWI610250B (zh) * | 2015-06-02 | 2018-01-01 | 鈺立微電子股份有限公司 | 監測系統及其操作方法 |
| US11055552B2 (en) * | 2016-01-12 | 2021-07-06 | Disney Enterprises, Inc. | Systems and methods for detecting light signatures and performing actions in response thereto |
| KR102375177B1 (ko) * | 2016-04-22 | 2022-03-16 | 핏스킨 인코포레이티드 | 전자 디바이스를 사용한 피부 분석을 위한 시스템 및 방법 |
| US10861604B2 (en) * | 2016-05-05 | 2020-12-08 | Advinow, Inc. | Systems and methods for automated medical diagnostics |
| KR101989225B1 (ko) * | 2017-06-08 | 2019-06-13 | 한국 한의학 연구원 | 영상 처리 장치 및 방법 |
| US11164679B2 (en) | 2017-06-20 | 2021-11-02 | Advinow, Inc. | Systems and methods for intelligent patient interface exam station |
| US11348688B2 (en) | 2018-03-06 | 2022-05-31 | Advinow, Inc. | Systems and methods for audio medical instrument patient measurements |
| KR102373725B1 (ko) * | 2020-09-22 | 2022-03-14 | 한국 한의학 연구원 | 3차원 복부 영상 분석 방법 및 장치 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002224049A (ja) * | 2001-02-06 | 2002-08-13 | Tadashi Goino | 携帯端末装置、アドバイスシステム、肌診断評価方法、肌診断評価用プログラム、化粧アドバイス提供方法及び化粧アドバイス提供用プログラム |
| JP2005065812A (ja) * | 2003-08-21 | 2005-03-17 | Nec Fielding Ltd | 健康診断システム,方法およびプログラム |
| JP2005143890A (ja) * | 2003-11-17 | 2005-06-09 | Fujitsu Ltd | 生体情報採取装置 |
| US20060092315A1 (en) * | 2004-10-29 | 2006-05-04 | Johnson & Johnson Consumer Companies, Inc. | Skin Imaging system with probe |
| WO2006049192A1 (ja) * | 2004-11-05 | 2006-05-11 | Ya-Man Ltd. | 皮膚トリートメント装置 |
| JP2008305261A (ja) * | 2007-06-08 | 2008-12-18 | Ritsumeikan | 認証システム及びこれを用いた測定システム |
| WO2009141769A1 (en) * | 2008-05-19 | 2009-11-26 | Koninklijke Philips Electronics N.V. | Reproducible positioning of sensing and/or treatment devices |
| JP2010264276A (ja) * | 2010-07-16 | 2010-11-25 | Tokyo Institute Of Technology | マルチスペクトル皮膚画像による診断方法 |
| JP2010284239A (ja) * | 2009-06-10 | 2010-12-24 | Nikon Corp | 肌診断装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2709656B1 (fr) * | 1993-09-07 | 1995-12-01 | Deemed Int Sa | Installation pour opération de microchirurgie assistée par ordinateur et procédés mis en Óoeuvre par ladite installation. |
| US8543519B2 (en) * | 2000-08-07 | 2013-09-24 | Health Discovery Corporation | System and method for remote melanoma screening |
| US8328420B2 (en) * | 2003-04-22 | 2012-12-11 | Marcio Marc Abreu | Apparatus and method for measuring biologic parameters |
| US20070213698A1 (en) * | 2006-03-10 | 2007-09-13 | Palomar Medical Technologies, Inc. | Photocosmetic device |
| EP2604216B1 (en) * | 2003-02-25 | 2018-08-22 | Tria Beauty, Inc. | Self-contained, diode-laser-based dermatologic treatment apparatus |
| EP1827229B1 (en) * | 2004-10-29 | 2011-08-24 | Johnson and Johnson Consumer Companies, Inc. | Apparatus for and method of taking and viewing images of the skin |
| US8642009B2 (en) * | 2005-12-16 | 2014-02-04 | Catherine M. Shachaf | Diagnostic system for the detection of skin cancer |
| US8577439B2 (en) | 2006-09-11 | 2013-11-05 | Koninklijke Philips N.V. | System and method for positioning electrodes on a patient body |
| US9117133B2 (en) * | 2008-06-18 | 2015-08-25 | Spectral Image, Inc. | Systems and methods for hyperspectral imaging |
| WO2010102197A2 (en) * | 2009-03-05 | 2010-09-10 | Cynosure, Inc. | Thermal surgical monitoring |
| US8606540B2 (en) * | 2009-11-10 | 2013-12-10 | Projectionworks, Inc. | Hole measurement apparatuses |
| US9974485B2 (en) * | 2009-12-11 | 2018-05-22 | Verizon Patent And Licensing Inc. | Method and system for providing remote healthcare services |
| WO2012111013A1 (en) * | 2011-02-17 | 2012-08-23 | Eon Medical Ltd. | System and method for performing an automatic and remote trained personnel guided medical examination |
| US9186278B2 (en) * | 2013-11-27 | 2015-11-17 | Elwha Llc | Systems and devices for sampling and profiling microbiota of skin |
-
2012
- 2012-09-20 JP JP2012206838A patent/JP2014061057A/ja active Pending
-
2013
- 2013-09-13 KR KR1020157006301A patent/KR102200740B1/ko active IP Right Grant
- 2013-09-13 CN CN201380047763.5A patent/CN104684461B/zh active Active
- 2013-09-13 US US14/427,757 patent/US9646378B2/en active Active
- 2013-09-13 WO PCT/JP2013/005447 patent/WO2014045558A1/en active Application Filing
- 2013-09-18 TW TW102133981A patent/TWI590804B/zh not_active IP Right Cessation
-
2017
- 2017-03-30 US US15/474,575 patent/US10026172B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002224049A (ja) * | 2001-02-06 | 2002-08-13 | Tadashi Goino | 携帯端末装置、アドバイスシステム、肌診断評価方法、肌診断評価用プログラム、化粧アドバイス提供方法及び化粧アドバイス提供用プログラム |
| JP2005065812A (ja) * | 2003-08-21 | 2005-03-17 | Nec Fielding Ltd | 健康診断システム,方法およびプログラム |
| JP2005143890A (ja) * | 2003-11-17 | 2005-06-09 | Fujitsu Ltd | 生体情報採取装置 |
| US20060092315A1 (en) * | 2004-10-29 | 2006-05-04 | Johnson & Johnson Consumer Companies, Inc. | Skin Imaging system with probe |
| WO2006049192A1 (ja) * | 2004-11-05 | 2006-05-11 | Ya-Man Ltd. | 皮膚トリートメント装置 |
| JP2008305261A (ja) * | 2007-06-08 | 2008-12-18 | Ritsumeikan | 認証システム及びこれを用いた測定システム |
| WO2009141769A1 (en) * | 2008-05-19 | 2009-11-26 | Koninklijke Philips Electronics N.V. | Reproducible positioning of sensing and/or treatment devices |
| JP2010284239A (ja) * | 2009-06-10 | 2010-12-24 | Nikon Corp | 肌診断装置 |
| JP2010264276A (ja) * | 2010-07-16 | 2010-11-25 | Tokyo Institute Of Technology | マルチスペクトル皮膚画像による診断方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2016076140A1 (ja) * | 2014-11-14 | 2017-08-24 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| US10617301B2 (en) | 2014-11-14 | 2020-04-14 | Sony Corporation | Information processing device and information processing method |
| JP2020516355A (ja) * | 2017-04-06 | 2020-06-11 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ウェアラブルデバイスの配置のための案内を与えるための方法及び装置 |
| WO2022114103A1 (ja) * | 2020-11-26 | 2022-06-02 | マクセル株式会社 | 肌状態測定システム |
| WO2022191269A1 (ja) * | 2021-03-10 | 2022-09-15 | マクセル株式会社 | 肌状態測定システム |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI590804B (zh) | 2017-07-11 |
| US10026172B2 (en) | 2018-07-17 |
| CN104684461A (zh) | 2015-06-03 |
| KR102200740B1 (ko) | 2021-01-08 |
| CN104684461B (zh) | 2018-05-04 |
| US9646378B2 (en) | 2017-05-09 |
| US20150235359A1 (en) | 2015-08-20 |
| US20170337678A1 (en) | 2017-11-23 |
| WO2014045558A1 (en) | 2014-03-27 |
| KR20150058194A (ko) | 2015-05-28 |
| TW201414455A (zh) | 2014-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014061057A (ja) | 情報処理装置、情報処理方法、プログラム、及び測定システム | |
| JP6066676B2 (ja) | ヘッドマウントディスプレイおよび映像提示システム | |
| KR20170013271A (ko) | 재활 지원 시스템 | |
| JP2013190941A (ja) | 情報入出力装置、及び頭部装着表示装置 | |
| JP2019185531A (ja) | 透過型頭部装着型表示装置、表示制御方法、およびコンピュータープログラム | |
| JP6136090B2 (ja) | 電子機器、及び表示装置 | |
| US9521329B2 (en) | Display device, display method, and computer-readable recording medium | |
| JP2018121686A (ja) | 内視鏡操作支援システム | |
| CN106961546A (zh) | 信息处理装置和方法、摄像装置、显示装置、控制方法 | |
| JP6406966B2 (ja) | 撮像装置、撮像装置の制御方法、撮像装置の制御プログラム | |
| US8876291B2 (en) | Control apparatus, ophthalmologic apparatus, system, control method, and program | |
| JP6719418B2 (ja) | 電子機器 | |
| JP6256779B2 (ja) | 情報処理装置、情報処理方法、プログラム、及び測定システム | |
| JP2020077271A (ja) | 表示装置、学習装置、及び、表示装置の制御方法 | |
| JP5732446B2 (ja) | ヘッドマウントディスプレイ、および動き検出方法 | |
| US20230333677A1 (en) | Optical stylus for optical position determination device | |
| JP6717393B2 (ja) | 電子機器 | |
| JP7010259B2 (ja) | 撮像装置、撮像方法およびプログラム | |
| JP6123160B2 (ja) | 電子機器、及び表示装置 | |
| JP2016202708A (ja) | 内視鏡システム及び内視鏡検査に用いられる機器のバッテリチェック方法 | |
| JP2016220839A (ja) | 内視鏡システム及び内視鏡システムにおける内視鏡画像の表示切替方法 | |
| JP2018085595A (ja) | 頭部装着型表示装置、及び、頭部装着型表示装置の制御方法 | |
| CN116998146A (zh) | 相机装置及相机系统 | |
| JP2014192889A (ja) | 撮像装置、操作装置、対象物確認方法、操作装置用プログラム | |
| JP2011244270A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160923 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20161122 |