JP2014046884A - 鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 - Google Patents
鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 Download PDFInfo
- Publication number
- JP2014046884A JP2014046884A JP2012193269A JP2012193269A JP2014046884A JP 2014046884 A JP2014046884 A JP 2014046884A JP 2012193269 A JP2012193269 A JP 2012193269A JP 2012193269 A JP2012193269 A JP 2012193269A JP 2014046884 A JP2014046884 A JP 2014046884A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle body
- vehicle
- tilt
- air spring
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 23
- 230000007246 mechanism Effects 0.000 claims abstract description 45
- 238000004364 calculation method Methods 0.000 claims abstract description 16
- 230000001934 delay Effects 0.000 claims abstract description 3
- 230000003111 delayed effect Effects 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 description 18
- 230000001133 acceleration Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 230000004580 weight loss Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images


Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
【解決手段】車体22の進行方向の前後部に該車体22を支持する台車を備え、該台車毎に車体22を車幅方向に傾斜させる車体傾斜機構を備える鉄道車両の車体傾斜制御装置において、車体22の傾斜角度目標値を演算する傾斜角度目標値演算部34と、該傾斜角度目標値演算部34の演算結果に基づいて、複数の車体傾斜機構の駆動制御を行う傾斜制御部35と、車体22前部に配置される車体傾斜機構の傾斜動作を車体22後部に配置される車体傾斜機構の傾斜動作よりも遅延させる遅延部40と、を備えている。
【選択図】図2
Description
この発明にかかる鉄道車両の車体傾斜制御装置は、車体の進行方向の前後部に該車体を支持する台車を備え、該台車毎に前記車体を車幅方向に傾斜させる車体傾斜機構を備える鉄道車両の車体傾斜制御装置において、前記車体の傾斜角度目標値を演算する傾斜角度目標値演算部と、該傾斜角度目標値演算部の演算結果に基づいて、前記車体傾斜機構の駆動制御を行う傾斜制御部と、前記車体の前部に配置される前記車体傾斜機構の傾斜動作を前記車体の後部に配置される前記車体傾斜機構の傾斜動作よりも遅延させる遅延部と、を備えることを特徴としている。
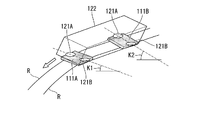
例えば、進行方向の前部に配置された台車の走行軌道の方が進行方向後方側に配置された台車の走行軌道よりも常に先にカントが変化して傾斜角度が変位することとなるが、カントの変位により車体の前部の傾斜角度が変位する際に、遅延部によって車体の後部の車体傾斜機構を車体の前部の車体傾斜機構よりも先に動作させることで、車体の後部の車体傾斜機構と車体の前部の車体傾斜機構との間に角度差を生じさせ、この角度差によって車体の前部と車体の後部とのカントの差分を吸収して、捩じり方向の力が車体に作用するのを抑制することができる。
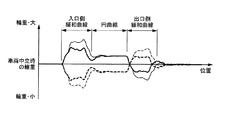
このように構成することで、鉄道車両が走行する軌道の外軌側レールの高さ位置が内軌側レールの高さ位置よりも高い状態から徐々に外軌側レールの高さ位置が低く変位する出口側緩和曲線において、カントの変位によって車体の前部が立ち上がる方向へ変位を開始するタイミングで、車体傾斜機構によって立ち上がる方向への車体の後部の変位を開始することができる。そのため、出口側緩和曲線において、車体の前部と車体の後部との地面に対する傾斜角度の変位タイミングを揃えて車体に捩じり方向の力が作用するのを抑制して、とりわけ車体の前部の台車における外軌側の輪重抜けなどの輪重変動を抑制することができる。
このように構成することで、鉄道車両が走行する軌道の外軌側レールの高さ位置が内軌側レールの高さ位置と同じ高さ位置の状態から徐々に外軌側レールの高さ位置が高く変位する入口側緩和曲線において、カントの変位によって車体の前部が寝る方向へ変位を開始するタイミングで、車体傾斜機構によって寝る方向への車体の後部の変位を開始させることができる。そのため、入口側緩和曲線において、車体の前部と車体の後部との地面に対する傾斜角度の変位タイミングを揃えて車体に捩じり方向の力が作用するのを抑制して、とりわけ車体の前部の台車における内軌側の輪重抜けなどの輪重変動を抑制することができる。
このように構成することで、高速で走行する際に迅速に伸縮可能な空気ばねを用いて車体の傾斜制御を行う場合には、車体に捩じり方向の力が作用しやすくなるが、車体の前部に配置される空気ばねの駆動制御を遅延させるだけで車体に捩じり方向の力が作用するのを抑制することができる。
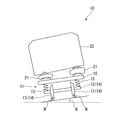
図1は、この実施形態の車体傾斜制御装置が搭載される車両10を示している。この車両10の台車11は、軌道を構成するレールRの幅方向(以下、単に車幅方向と称する)に延びる車軸12に略円盤状の2枚の車輪13,13が圧入された一対の輪軸14(図1中、一方のみを示す)を備えており、これら一対の輪軸14が、互いの車軸12が前後平行となるように配置されている。ここで、車軸12は、その左右端部が軸受け(図示せず)により回動自在に支持され、これら軸受けを備えた支持部(図示せず)に、軸バネ15を介して台車枠16が支持されている。
また、車体傾斜制御装置100は、速度発電機の出力などに基づき自車の走行速度を検出する走行速度検出部33を有している。走行速度検出部33は、検出した速度情報を傾斜角度目標値演算部34に向けて出力する。
次いで、車両10が曲線区間を走行しているか否かを判定する(ステップS02)。ここで、進行方向の前方側に配置された台車11が曲線区間の入口側緩和曲線に進入した場合には、曲線区間を走行していると判定される。
さらに、前部に配置されている第一空気ばね21a、第二空気ばね21bの高さ目標値を遅延部40に保存する(ステップS06)とともに、後部に配置されている第三空気ばね21c、第四空気ばね21dの高さを変化させる第三高さ制御装置37cおよび第四高さ制御装置37dに対して、上述した第三空気ばね21c、第四空気ばね21dの高さの目標値を現在の高さ制御指令として入力する(ステップS07)。これにより、現在の高さの目標値となるように後部に配置されている第三空気ばね21cおよび第四空気ばね21dが伸縮される。
例えば、上述した実施形態においては、車体傾斜機構として第一空気ばね21a、第二空気ばね21b、第三空気ばね21c、および、第四空気ばね21dをアクチュエータとして用いて車体22の傾斜制御を行う場合について説明したが、台車11の台車枠16と車体22との間に円弧状のガイドを備える振り子梁を設け、この振り子梁をアクチュエータによって揺動させることで車体22をガイドに沿って傾斜させるいわゆる制御付き振り子車両の傾斜機構であってもよい。また、空気ばね以外のアクチュエータとして、例えば、油圧アクチュエータ、空気圧アクチュエータ、電動アクチュエータなどを用いた傾斜機構を採用してもよい。
11 台車
21 空気ばね(車体傾斜機構)
22 車体
34 傾斜角度目標値演算部
35 傾斜制御部
37a 第一高さ制御装置(車体傾斜機構)
37b 第二高さ制御装置(車体傾斜機構)
37c 第三高さ制御装置(車体傾斜機構)
37d 第四高さ制御装置(車体傾斜機構)
40 遅延部
Claims (7)
- 車体の進行方向の前後部に該車体を支持する台車を備え、該台車毎に前記車体を車幅方向に傾斜させる車体傾斜機構を備える鉄道車両の車体傾斜制御装置において、
前記車体の傾斜角度目標値を演算する傾斜角度目標値演算部と、
該傾斜角度目標値演算部の演算結果に基づいて、前記車体傾斜機構の駆動制御を行う傾斜制御部と、
前記車体の前部に配置される前記車体傾斜機構の傾斜動作を前記車体の後部に配置される前記車体傾斜機構の傾斜動作よりも遅延させる遅延部と、を備えることを特徴とする鉄道車両の車体傾斜制御装置。 - 前記傾斜制御部は、前記車体の前部が出口側緩和曲線に進入するタイミングで、前記車体傾斜機構の駆動制御を開始し、前記車体の後部が前記出口側緩和曲線に進入するまで、前記車体の前部に配置される前記車体傾斜機構の駆動制御を遅延させる請求項1に記載の鉄道車両の車体傾斜制御装置。
- 前記傾斜制御部は、前記車体の前部が入口側緩和曲線に進入するタイミングで、前記車体傾斜機構の駆動制御を開始し、前記車体の後部が前記入口側緩和曲線に進入するまで、前記車体の前部に配置される前記車体傾斜機構の駆動制御を遅延させる請求項1又は2に記載の鉄道車両の車体傾斜制御装置。
- 前記車体傾斜機構は、
車幅方向に離間配置された複数の空気ばねを各台車に備える請求項1から3の何れか一項に記載の鉄道車両の車体傾斜制御装置。 - 車体の進行方向の前後部に該車体を支持する台車を備え、該台車毎に前記車体を車幅方向に傾斜させる車体傾斜機構を備える鉄道車両の車体傾斜制御方法において、
前記車体の前部における傾斜を開始するタイミングを、前記車体の後部における傾斜を開始するタイミングよりも遅延させることを特徴とする鉄道車両の車体傾斜制御方法。 - 前記車体の前部が出口側緩和曲線に進入するタイミングで、前記車体の後部の傾斜を開始し、前記車体の後部が出口側緩和曲線に進入するタイミングで、前記車体の前部の車体傾斜を開始する請求項5に記載の鉄道車両の車体傾斜制御方法。
- 前記車体の前部が入口側緩和曲線に進入するタイミングで、前記車体の後部の傾斜を開始し、前記車体の後部が入口側緩和曲線に進入するタイミングで、前記車体の前部の車体傾斜を開始する請求項5又は6に記載の鉄道車両の車体傾斜制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012193269A JP5917343B2 (ja) | 2012-09-03 | 2012-09-03 | 鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012193269A JP5917343B2 (ja) | 2012-09-03 | 2012-09-03 | 鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014046884A true JP2014046884A (ja) | 2014-03-17 |
| JP5917343B2 JP5917343B2 (ja) | 2016-05-11 |
Family
ID=50606961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012193269A Active JP5917343B2 (ja) | 2012-09-03 | 2012-09-03 | 鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5917343B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018039286A (ja) * | 2016-09-05 | 2018-03-15 | 新日鐵住金株式会社 | 鉄道車両の車体傾斜制御方法 |
| JP2021165099A (ja) * | 2020-04-08 | 2021-10-14 | 公益財団法人鉄道総合技術研究所 | 傾斜角度制御装置、傾斜角度制御方法及び鉄道車両 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5636576A (en) * | 1995-11-07 | 1997-06-10 | Construcciones Y Auxiliar De Ferrocarriles, S.A. | Tilting system for railway rolling stock |
| JP2000085577A (ja) * | 1998-09-11 | 2000-03-28 | Sumitomo Metal Ind Ltd | 鉄道車両における空気ばねによる車体傾斜制御時の給排気方法 |
| JP2001001895A (ja) * | 1999-06-18 | 2001-01-09 | Sumitomo Metal Ind Ltd | 鉄道車両の車体傾斜制御装置 |
| JP2011016441A (ja) * | 2009-07-08 | 2011-01-27 | Sumitomo Metal Ind Ltd | 鉄道車両の車体傾斜制御装置 |
-
2012
- 2012-09-03 JP JP2012193269A patent/JP5917343B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5636576A (en) * | 1995-11-07 | 1997-06-10 | Construcciones Y Auxiliar De Ferrocarriles, S.A. | Tilting system for railway rolling stock |
| JP2000085577A (ja) * | 1998-09-11 | 2000-03-28 | Sumitomo Metal Ind Ltd | 鉄道車両における空気ばねによる車体傾斜制御時の給排気方法 |
| JP2001001895A (ja) * | 1999-06-18 | 2001-01-09 | Sumitomo Metal Ind Ltd | 鉄道車両の車体傾斜制御装置 |
| JP2011016441A (ja) * | 2009-07-08 | 2011-01-27 | Sumitomo Metal Ind Ltd | 鉄道車両の車体傾斜制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018039286A (ja) * | 2016-09-05 | 2018-03-15 | 新日鐵住金株式会社 | 鉄道車両の車体傾斜制御方法 |
| JP2021165099A (ja) * | 2020-04-08 | 2021-10-14 | 公益財団法人鉄道総合技術研究所 | 傾斜角度制御装置、傾斜角度制御方法及び鉄道車両 |
| JP7295825B2 (ja) | 2020-04-08 | 2023-06-21 | 公益財団法人鉄道総合技術研究所 | 傾斜角度制御装置、傾斜角度制御方法及び鉄道車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5917343B2 (ja) | 2016-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5255780B2 (ja) | 鉄道車両の振動制御装置 | |
| CN103097225B (zh) | 铁路车辆的振动成分加速度估计装置和振动成分加速度估计方法 | |
| JP5704306B2 (ja) | 鉄道車両用振動制御装置 | |
| JP2008247333A (ja) | 鉄道車両用振動制御装置 | |
| WO2017146228A1 (ja) | 車体傾斜制御装置および車体傾斜制御装置の故障判定装置 | |
| JP5917343B2 (ja) | 鉄道車両の車体傾斜制御装置、および、車体傾斜制御方法 | |
| JP2011213183A (ja) | 可変減衰軸ダンパの異常検出装置及び異常検出方法 | |
| JP5038960B2 (ja) | 振子車両の車体傾斜角の制御方法及び振子車両の車体傾斜角の制御システム | |
| JP5675405B2 (ja) | 軌道系交通車両及びその車体姿勢制御装置 | |
| JP5643124B2 (ja) | 車両間ダンパ装置 | |
| JP5522549B2 (ja) | 鉄道車両用振動制御装置 | |
| JP4979360B2 (ja) | 鉄道車両 | |
| JP2018083556A (ja) | 鉄道車両の高さ調整装置 | |
| JP3529366B2 (ja) | 鉄道車両の車体傾斜制御装置 | |
| JP5981829B2 (ja) | 鉄道車両の車体高さ調整装置、および、車体高さ調整方法 | |
| JP4429955B2 (ja) | 車両制振装置 | |
| JP2012179970A (ja) | サスペンション制御装置 | |
| JP2005041439A (ja) | 鉄道車両 | |
| JP4429957B2 (ja) | 車体制振装置 | |
| JP5812591B2 (ja) | 鉄道車両用振動制御装置 | |
| JP4799039B2 (ja) | 鉄道車両の車体傾斜装置 | |
| JP2014141257A (ja) | 車両間ダンパ装置 | |
| JP2005238937A (ja) | 鉄道車両 | |
| JP6492362B2 (ja) | 車体傾斜制御装置 | |
| JPH06247299A (ja) | 鉄道車両の振動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5917343 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |