JP2014010561A - プローブ情報収集システム - Google Patents
プローブ情報収集システム Download PDFInfo
- Publication number
- JP2014010561A JP2014010561A JP2012145896A JP2012145896A JP2014010561A JP 2014010561 A JP2014010561 A JP 2014010561A JP 2012145896 A JP2012145896 A JP 2012145896A JP 2012145896 A JP2012145896 A JP 2012145896A JP 2014010561 A JP2014010561 A JP 2014010561A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- information
- probe
- travel
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Abstract
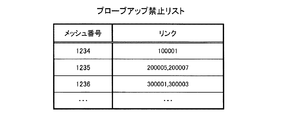
【解決手段】車両3が逆走状態にあることが検出された場合に、車両が走行する2次メッシュのメッシュ番号に対応付けられたプローブアップ禁止リスト15をプローブセンタ4から取得し、取得したプローブアップ禁止リスト15に基づいて、車両3が有する地図情報よりも作成時期の新しいプローブセンタ4が有する最新の地図情報においても逆走状態にあるか否かを判定し、最新の地図情報においても逆走状態にあると判定された場合に、違反走行に関する情報をプローブ情報として車両3からプローブセンタ4へ送信するように構成する。
【選択図】図10
Description
現在位置検出部31は、GPS41、車速センサ42、ステアリングセンサ43、ジャイロセンサ44等からなり、現在の車両の位置、方位、車両の走行速度、現在時刻等を検出することが可能となっている。ここで、特に車速センサ42は、車両の移動距離や車速を検出する為のセンサであり、車両の駆動輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU33に出力する。そして、ナビゲーションECU33は発生するパルスを計数することにより駆動輪の回転速度や移動距離を算出する。尚、上記4種類のセンサをナビゲーション装置2が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置2が備える構成としても良い。
ステップ(以下、Sと略記する)1においてCPU51は、車両3の車両情報について取得する。具体的には、車両3の現在位置及び現在方位を現在位置検出部31の検出結果に基づいて取得する。尚、車両3の現在位置を地図データ上で特定するマップマッチング処理についても行う。更に、車両3の現在位置は、高精度ロケーション技術を用いて詳細に特定することが望ましい。ここで、高精度ロケーション技術とは、車両後方のカメラから取り込んだ白線や路面ペイント情報を画像認識により検出し、更に、白線や路面ペイント情報を予め記憶した地図情報DBと照合することにより、走行車線や高精度な車両位置を検出可能にする技術である。尚、高精度ロケーション技術の詳細については既に公知であるので省略する。
尚、前記S2の逆走状態の判定処理内容については、上記例に限られることはない。例えば、一方通行区間の走行中に車両がUターンした場合に、車両が逆走状態にあると判定する構成としても良い。
先ず、S11においてCPU21は、全国を走行する各車両3からメッシュ番号情報の送信があるか否か判定する。
また、特に車両3が道路を逆走したことを違反走行として検出するので、実際には逆走していない車両3から違反走行に関するプローブ情報がプローブセンタへと送信されないように構成することが可能となる。
また、車両3の有する地図情報よりも作成時期の新しいプローブセンタ4の有する地図情報に含まれる特定の道路又はエリアにおいて車両3の違反走行を検出した場合には、車両3が違反走行を行っていないと判定するので、違反走行を行っていると検出された車両3が実際に違反走行を行っているか否かを車両3が走行する道路やエリアに基づいて確認することが可能となる。
また、プローブセンタ4の有する地図情報において所定期間内に情報が更新されたエリアにおいて車両3の違反走行を検出した場合には、車両3が違反走行を行っていないと判定するので、更新前の古い地図情報によって車両3が違反走行を行ったと誤検出した場合において、車両3から違反走行に関するプローブ情報がプローブセンタ4へと送信されないように構成することが可能となる。
また、プローブセンタ4の有する地図情報において所定期間内に情報が更新された道路において車両3の違反走行を検出した場合には、車両3が違反走行を行っていないと判定するので、更新前の古い地図情報によって車両3が違反走行を行ったと誤検出した場合において、車両3から違反走行に関するプローブ情報がプローブセンタ4へと送信されないように構成することが可能となる。
更に、プローブセンタ4の有する地図情報において所定期間内に情報が更新された道路及び該道路に接続された道路において車両3の違反走行を検出した場合には、車両3が違反走行を行っていないと判定するので、更新前の古い地図情報によって車両3が違反走行を行ったと誤検出した場合において、車両3から違反走行に関するプローブ情報がプローブセンタ4へと送信されないように構成することが可能となる。
例えば、本実施形態では、プローブセンタ4が有する最新の地図情報においても車両3が逆走状態にあるか否かを判定(S5)する判定主体は、ナビゲーション装置2であったが、プローブセンタ4やその他のセンタが実行する構成としても良い。また、複数の主体によって実行する構成としても良い。尚、プローブセンタ4が判定する場合には、判定結果をプローブセンタ4からナビゲーション装置2へと送信するように構成する。
2 ナビゲーション装置
3 車両
4 プローブセンタ
5 交通情報センタ
11 サーバ
14 センタ地図情報DB
15 プローブアップ禁止リスト
21 CPU
22 RAM
23 ROM
33 ナビゲーションECU
51 CPU
52 RAM
53 ROM
Claims (6)
- 複数の車両と、複数の前記車両と双方向通信可能に接続されたプローブセンタとからなり、複数の前記車両から送信されたプローブ情報を前記プローブセンタが収集するプローブ情報収集システムであって、
前記車両の走行情報を取得する走行情報取得手段と、
前記車両が有する地図情報である車載地図情報を取得する車載地図情報取得手段と、
前記車両の走行情報と前記車載地図情報とに基づいて、前記車両が道路に設定された規制を遵守しない走行である違反走行を行ったことを検出する違反走行検出手段と、
前記車載地図情報よりも作成時期の新しい地図情報である外部地図情報を取得する外部地図情報取得手段と、
前記違反走行検出手段によって前記車両が前記道路で違反走行を行ったことが検出された場合に、前記車両の走行情報と前記外部地図情報とに基づいて、前記車両が前記違反走行を行ったか否かを改めて判定する違反走行判定手段と、
前記違反走行定手段によって前記車両が前記違反走行を行ったと判定された場合に、前記違反走行に関する情報をプローブ情報として前記プローブセンタへ送信する情報送信手段と、を有することを特徴とするプローブ情報収集システム。 - 前記違反走行検出手段は、前記車両が前記道路を逆走したことを前記違反走行として検出することを特徴とする請求項1に記載のプローブ情報収集システム。
- 前記違反走行判定手段は、
前記外部地図情報に含まれる特定エリア又は特定道路において、前記違反走行検出手段によって前記車両が違反走行を行ったと検出された場合には、前記車両が前記違反走行を行っていないと判定し、
前記外部地図情報に含まれる前記特定エリア以外のエリア又は前記特定道路以外の道路において、前記違反走行検出手段によって前記車両が違反走行を行ったと検出された場合には、前記車両が前記違反走行を行ったと判定することを特徴とする請求項1又は請求項2に記載のプローブ情報収集システム。 - 前記特定エリアは、前記外部地図情報において所定期間内に情報が更新されたエリアであることを特徴とする請求項3に記載のプローブ情報収集システム。
- 前記特定道路は、前記外部地図情報において所定期間内に情報が更新された道路であることを特徴とする請求項3に記載のプローブ情報収集システム。
- 前記特定道路は、前記外部地図情報において所定期間内に情報が更新された道路及び該道路に接続された道路であることを特徴とする請求項3に記載のプローブ情報収集システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012145896A JP5953981B2 (ja) | 2012-06-28 | 2012-06-28 | プローブ情報収集システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012145896A JP5953981B2 (ja) | 2012-06-28 | 2012-06-28 | プローブ情報収集システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014010561A true JP2014010561A (ja) | 2014-01-20 |
| JP5953981B2 JP5953981B2 (ja) | 2016-07-20 |
Family
ID=50107249
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012145896A Expired - Fee Related JP5953981B2 (ja) | 2012-06-28 | 2012-06-28 | プローブ情報収集システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5953981B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014131295A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| JP2014131293A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| CN104952253A (zh) * | 2015-06-30 | 2015-09-30 | 公安部第三研究所 | 一种交通违章行为记录和预警系统及方法 |
| JP2017045448A (ja) * | 2015-07-17 | 2017-03-02 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 誤った走行方向で走行中の車両について警告する方法及びシステム |
| JP2019101806A (ja) * | 2017-12-04 | 2019-06-24 | 株式会社トヨタマップマスター | 走行現調支援装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6384740B1 (en) * | 2001-07-30 | 2002-05-07 | Khaled A. Al-Ahmed | Traffic speed surveillance and control system |
| JP2009140008A (ja) * | 2007-12-03 | 2009-06-25 | Sumitomo Electric Ind Ltd | 危険走行情報提供装置、危険走行判定プログラム及び危険走行判定方法 |
-
2012
- 2012-06-28 JP JP2012145896A patent/JP5953981B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6384740B1 (en) * | 2001-07-30 | 2002-05-07 | Khaled A. Al-Ahmed | Traffic speed surveillance and control system |
| JP2009140008A (ja) * | 2007-12-03 | 2009-06-25 | Sumitomo Electric Ind Ltd | 危険走行情報提供装置、危険走行判定プログラム及び危険走行判定方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014131295A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| JP2014131293A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| CN104952253A (zh) * | 2015-06-30 | 2015-09-30 | 公安部第三研究所 | 一种交通违章行为记录和预警系统及方法 |
| JP2017045448A (ja) * | 2015-07-17 | 2017-03-02 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 誤った走行方向で走行中の車両について警告する方法及びシステム |
| JP2019101806A (ja) * | 2017-12-04 | 2019-06-24 | 株式会社トヨタマップマスター | 走行現調支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5953981B2 (ja) | 2016-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6488594B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP4935704B2 (ja) | 駐車場混雑状態判定装置、駐車場混雑状態判定方法及びコンピュータプログラム | |
| JP6390276B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP5541103B2 (ja) | 走行案内装置、走行案内方法及びコンピュータプログラム | |
| JP6375754B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6197691B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP5316292B2 (ja) | 地図情報案内装置、地図情報案内方法及びコンピュータプログラム | |
| JP6331984B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6269104B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP5565203B2 (ja) | 交差点情報取得装置、交差点情報取得方法及びコンピュータプログラム | |
| JP2012132744A (ja) | 経路案内装置、経路案内方法及びコンピュータプログラム | |
| JP5966675B2 (ja) | プローブ情報収集システム | |
| JP2012189343A (ja) | 運転支援装置、運転支援方法及びコンピュータプログラム | |
| JP5953981B2 (ja) | プローブ情報収集システム | |
| WO2018151005A1 (ja) | 走行支援装置及びコンピュータプログラム | |
| JP2015025784A (ja) | 交通情報案内システム、交通情報案内装置、交通情報案内方法及びコンピュータプログラム | |
| JP6160364B2 (ja) | 地図情報更新システム、地図情報更新装置、地図情報更新方法及びコンピュータプログラム | |
| JP2017041038A (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP2014199587A (ja) | 減速終了地点記憶システム、運転支援システム、運転支援方法及びコンピュータプログラム | |
| JP5716565B2 (ja) | 信号機増減検出システム、信号機増減検出装置、信号機増減検出方法及びコンピュータプログラム | |
| JP5353744B2 (ja) | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム | |
| JP2019053394A (ja) | 自動運転支援装置及びコンピュータプログラム | |
| JP4723261B2 (ja) | ナビゲーションシステム、ナビゲーション装置およびプログラム | |
| JP2013199241A (ja) | 車両制御装置、車両制御方法及びコンピュータプログラム | |
| JP2011033402A (ja) | 渋滞度案内装置、渋滞度案内方法及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151009 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5953981 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |