JP2013242156A - サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 - Google Patents
サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 Download PDFInfo
- Publication number
- JP2013242156A JP2013242156A JP2012113657A JP2012113657A JP2013242156A JP 2013242156 A JP2013242156 A JP 2013242156A JP 2012113657 A JP2012113657 A JP 2012113657A JP 2012113657 A JP2012113657 A JP 2012113657A JP 2013242156 A JP2013242156 A JP 2013242156A
- Authority
- JP
- Japan
- Prior art keywords
- sample
- light
- tube
- tube holder
- liquid feeding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000007788 liquid Substances 0.000 title claims abstract description 124
- 238000000034 method Methods 0.000 title claims abstract description 44
- 238000001514 detection method Methods 0.000 claims abstract description 41
- 230000005540 biological transmission Effects 0.000 claims abstract description 19
- 230000001678 irradiating effect Effects 0.000 claims abstract 2
- 230000003287 optical effect Effects 0.000 claims description 19
- 230000009471 action Effects 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 abstract description 2
- 230000007850 degeneration Effects 0.000 abstract 1
- 239000000523 sample Substances 0.000 description 262
- 238000003756 stirring Methods 0.000 description 33
- 239000011859 microparticle Substances 0.000 description 24
- 238000005516 engineering process Methods 0.000 description 20
- 239000010419 fine particle Substances 0.000 description 12
- 238000010586 diagram Methods 0.000 description 10
- 210000004027 cell Anatomy 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 238000012544 monitoring process Methods 0.000 description 7
- 238000013019 agitation Methods 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 4
- 239000012530 fluid Substances 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 239000002245 particle Substances 0.000 description 4
- 238000005086 pumping Methods 0.000 description 4
- 230000002238 attenuated effect Effects 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 3
- 239000002861 polymer material Substances 0.000 description 3
- 240000001973 Ficus microcarpa Species 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000011109 contamination Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000007405 data analysis Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 2
- 229920000592 inorganic polymer Polymers 0.000 description 2
- 239000002502 liposome Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 244000005700 microbiome Species 0.000 description 2
- 210000003463 organelle Anatomy 0.000 description 2
- 229920000620 organic polymer Polymers 0.000 description 2
- 239000012488 sample solution Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- CHRJZRDFSQHIFI-UHFFFAOYSA-N 1,2-bis(ethenyl)benzene;styrene Chemical compound C=CC1=CC=CC=C1.C=CC1=CC=CC=C1C=C CHRJZRDFSQHIFI-UHFFFAOYSA-N 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- 241000196324 Embryophyta Species 0.000 description 1
- 241000588724 Escherichia coli Species 0.000 description 1
- 241000233866 Fungi Species 0.000 description 1
- 108091005461 Nucleic proteins Proteins 0.000 description 1
- 239000004793 Polystyrene Substances 0.000 description 1
- 240000004808 Saccharomyces cerevisiae Species 0.000 description 1
- 241000723873 Tobacco mosaic virus Species 0.000 description 1
- 241000700605 Viruses Species 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 210000004102 animal cell Anatomy 0.000 description 1
- 210000000601 blood cell Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 210000000349 chromosome Anatomy 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 238000012840 feeding operation Methods 0.000 description 1
- 239000007863 gel particle Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 210000003470 mitochondria Anatomy 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 102000039446 nucleic acids Human genes 0.000 description 1
- 108020004707 nucleic acids Proteins 0.000 description 1
- 150000007523 nucleic acids Chemical class 0.000 description 1
- 239000012466 permeate Substances 0.000 description 1
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000004926 polymethyl methacrylate Substances 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 229920002223 polystyrene Polymers 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images








Abstract
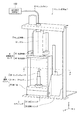
【解決手段】光を照射する光照射部41と、光を検出する光検出部42と、サンプルチューブ22を収容し、側面に光を遮光する遮光部、及び光が通過可能な一対の光透過部を有するチューブホルダ21と、を備える。このサンプル送液装置では、チューブホルダ21が、光照射部41が照射する光を遮光するため、チューブホルダ21が所定位置に設置されていることを把握できる。また、光照射部41から照射された光がチューブホルダ21を通過可能になるまでチューブホルダ21が回転し、回転した角度により、チューブホルダ21に収容されたサンプルチューブ22の形状を判定できる。また、サンプルを送液中に撹拌を行い、且つ熱によるサンプルの変質を最小限に抑えることが可能な機構を有する。
【選択図】図1
Description
このサンプル送液装置では、チューブホルダに、収容されたサンプルチューブの側面に照射される前記光を遮光する遮光部が設けられることにより、光照射部が照射する光を遮光するため、チューブホルダが所定位置に設置されていることを把握することが可能になる。
また、このサンプル送液装置では、遮光部に対する光照射により前記チューブホルダを側面の周方向に回転する駆動部を更に備えることが好ましい。
また、このサンプル送液装置では、前記光検出部により検出される前記光の光量により前記サンプルチューブ内のサンプルの残量を判定する制御部を備えていることが好ましい。
また、このサンプル送液装置では、前記光の光路と一対の前記光透過部間の直線とが重なるように、前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの形状に応じて異なることが好ましい。
また、このサンプル送液装置では、前記光路と前記直線とが重なるように、前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの容積に応じて異なることが好ましい。
このサンプル送液装置では、光照射部から照射された光が光検出部に通過可能になるまでチューブホルダが回転され、回転した角度により、チューブホルダに収容されたサンプルチューブの形状(種類)を判定することが可能になる。そして、サンプルチューブの形状(種類)に応じて最適化された回転角度及びサンプル残量の基準値を用いてサンプル残量の判断を行うことにより、安定したサンプル送液を行うことができる。
また、サンプル送液装置では、前記駆動部に取り付けられた第1のマグネットと、該第1のマグネットとは離隔し且つ対向して設けられ、前記チューブホルダの底部に位置し、前記第1のマグネットの磁力作用により回転する第2のマグネットと、を更に備えることが好ましい。
このサンプル送液装置では、第2のマグネットの回転により発せられる駆動部の熱がサンプルに伝達されることなくサンプルチューブ内のサンプルの撹拌を行うことが可能になる。また、このサンプル送液装置は、サンプルを送液中に任意のタイミングで撹拌を行い、且つ熱によるサンプルの変質を最小限に抑えることが可能な機構を有する。
また、このサンプル送液装置が連結されたフローサイトメータを提供することも可能である。
「微小粒子」には、細胞や微生物、リポソームなどの生体関連微小粒子、あるいはラテックス粒子やゲル粒子、工業用粒子などの合成粒子などが広く含まれるものとする。
生体関連微小粒子には、各種細胞を構成する染色体、リポソーム、ミトコンドリア、オルガネラ(細胞小器官)などが含まれる。細胞には、動物細胞(血球系細胞など)および植物細胞が含まれる。微生物には、大腸菌などの細菌類、タバコモザイクウイルスなどのウイルス類、イースト菌などの菌類などが含まれる。さらに、生体関連微小粒子には、核酸やタンパク質、これらの複合体などの生体関連高分子も包含され得るものとする。また、工業用粒子は、例えば有機もしくは無機高分子材料、金属などであってもよい。有機高分子材料には、ポリスチレン、スチレン・ジビニルベンゼン、ポリメチルメタクリレートなどが含まれる。無機高分子材料には、ガラス、シリカ、磁性体材料などが含まれる。金属には、金コロイド、アルミなどが含まれる。これら微小粒子の形状は、一般には球形であるのが普通であるが、非球形であってもよく、また大きさや質量なども特に限定されない。
本技術において「駆動部」としては、モータ及びギアより構成されるもの等が挙げられる。
1.本技術に係るサンプル送液装置1の装置構成
(1−1)撹拌ユニット
(1−2)エアシリンダ
(1−3)液面検出センサとチューブホルダ
(1−4)加圧送液部
(1−5)サンプルライン
(1−6)制御部等
2.本技術に係るサンプル送液方法
(2−1)ホルダ上昇ステップS1
(2−2)チューブホルダ検出ステップS2
(2−3)サンプルチューブ判定ステップS3
(2−4)サンプル撹拌ステップS4
(2−5)サンプル送液ステップS5
(2−6)液面モニタリングステップS6
(2−7)警告ステップS7
図1は、サンプルローディングモジュールとして構成された本技術に係るサンプル送液装置1の構成を説明する模式図である。
図1中符号2は、設置されたサンプルチューブ22内のサンプルを撹拌する撹拌ユニット2を示す。撹拌ユニット2は、サンプルチューブ22を収容するチューブホルダ21と、チューブホルダ21を設置する設置台23とを含む。
図1中符号3は、サンプルチューブ22が加圧送液部5内に設置されるように撹拌ユニット2を上昇(図1中、矢印Aの方向(Z軸正方向))させるエアシリンダを示す。エアシリンダ3は、撹拌ユニット2を加圧して気密を保持する加圧シリンダ31と、エアシリンダ3を昇降させる昇降シリンダ32とを含む。撹拌ユニット2に含まれるチューブホルダ21を加圧送液部5内まで上昇させることで、サンプルチューブ22内のサンプルを微小粒子測定装置100等に送液させることが可能になる。
図1中符号4は、光を照射する光照射部41と、光照射部41が照射した光を検出する光検出部42とを含む液面検出センサを示す。
図1中符号5は、Z軸正方向に上昇したチューブホルダ21を収容し、サンプルチューブ22内のサンプルを加圧しノズル51から送液させる加圧送液部を示す。
図1中符号6は、上記加圧送液部5で加圧送液されたサンプルチューブ22内のサンプルを通流させるサンプルライン6を示す。サンプルライン6に通流されたサンプルは、連結された微小粒子測定装置(フローサイトメータ)100に送液される。サンプルライン6としては、特に限定されるものではないが、例えば、シリコーンチューブから構成される。
サンプル送液装置1は、上述の構成に加え、液面検出センサ4による特性判定のためのデータ解析部を備える。また、サンプル送液装置1は、モータ24によるサンプルチューブの回転、撹拌ユニット2の昇降、光照射部41によるレーザLの照射のオン/オフ、及び加圧送液部5内での加圧/減圧等の本技術に係る制御を行うための制御部等も備える。
(2−1)ホルダ上昇ステップS2
以下、図4〜図9を参照しながら本技術に係るサンプル送液方法について説明する。図4及び図5は、制御部により制御されており、サンプルチューブ22に含まれるサンプルを送液するためのサンプル送液方法を説明するフローチャートである。また、図6〜図9は、本技術に係るサンプル送液方法を実行しているサンプル送液装置1の状態を示す模式図である。サンプル送液方法は、「ホルダ上昇ステップS1」、「チューブホルダ検出ステップS2」、「サンプルチューブ判定ステップS3」、「サンプル撹拌ステップS4」、「サンプル送液ステップS5」、「液面モニタリングステップS6」、「警告ステップS7」の手順を含む。以下、各手順について説明する。
チューブホルダ検出ステップS2では、加圧送液部5内まで上昇した撹拌ユニット2にチューブホルダ21が設置されているか否か判定される(図4参照)。ここで、図5を参照しながら本ステップで行われる手順について詳細に説明する。図5は、本技術に係るサンプル送液方法のうちチューブホルダ検出ステップS2及び後述するサンプルチューブ判定ステップS3をより具体的に説明するフローチャートである。
サンプルチューブ判定ステップS3では、チューブホルダ21に収容されたサンプルチューブ22の容積を判定する(図4参照)。ここで、再び図5を参照しながら本ステップで行われる手順について詳細に説明する。
次に、撹拌ステップS4では、サンプルチューブ22内のサンプルが撹拌される(図4参照)。具体的には、まず、図2(b)に示すように、撹拌ユニット2において、モータ24が駆動することにより、ギア27が回転する。そして、ギア27が回転することにより、ギア28が連動して回転し、その回転に伴い第1のマグネット25が回転する。また、第1のマグネット25が磁力伝播方式により外部から動力を伝えることで、第1のマグネット25に対向して設けられている第2のマグネット26が駆動し回転する。そして、第2のマグネット26の回転により、第2のマグネット26の上方(図2(a)中、Z軸正方向)に位置するチューブホルダ21が回転する。
次に、サンプル送液ステップS5では、サンプルの微小粒子測定装置(フローサイトメータ)100等への送液が開始される(図4参照)。加圧送液部5内でチューブホルダ21が加圧シリンダ31により加圧され、気密性が保持された状態で、サンプルはサンプルライン6から微小粒子測定装置100等へ送液される。
液面モニタリングステップS6では、送液が開始されたサンプルのサンプルチューブ22内の残量について、制御部がモニタリングをする。上記モニタリングについては、まず、サンプルチューブ22の容積又は形状に応じて設定された基準値により、光照射部41のレーザLの高さが調整される。そして、外部に送液されることで徐々に下がっていくサンプルの液面がレーザLにより検出されるか否かが判定される。
警告ステップS7では、サンプルの液面がレーザLにより検出されると、ユーザに警告がなされる。これにより、ユーザは、サンプルチューブ22内のサンプルの残量が少なくなってきていることを把握することができる。
(1)光を照射する光照射部と、前記光を検出する光検出部と、収容されたサンプルチューブの側面に照射される前記光を遮光する遮光部、及び前記光が通過可能な一対の光透過部を有するチューブホルダと、を備えるサンプル送液装置。
(2)前記遮光部に対する光照射により前記チューブホルダを側面の周方向に回転する駆動部を更に備える前記(1)記載のサンプル送液装置。
(3)前記光検出部により検出される前記光の光量により前記サンプルチューブ内のサンプルの残量を判定する制御部を備える、前記(1)又は(2)記載のサンプル送液装置。
(4)前記光の光路と一対の前記光透過部間の直線とが重なるように、前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの形状に応じて異なる前記(1)〜(3)の何れか一つに記載のサンプル送液装置。
(5)前記光路と前記直線とが重なるように、前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの容積に応じて異なる前記(1)〜(4)の何れか一つに記載のサンプル送液装置。
(6)前記駆動部に取り付けられた第1のマグネットと、該第1のマグネットとは離隔し且つ対向して設けられ、前記チューブホルダの底部に位置し、前記第1のマグネットの磁力作用により回転する第2のマグネットと、を更に備える前記(1)〜(5)の何れか一つに記載のサンプル送液装置。
(7)前記(1)〜(6)の何れか一つに記載のサンプル送液装置が連接されたフローサイトメータ。
(8)光照射により、チューブホルダの有無を判定し、光が通過するまで前記チューブホルダを回転し、光が通過する前記チューブホルダの回転角度を検出し、前記回転角度に応じて前記チューホルダに収容されたサンプルチューブの形状を判定する手順を含む、サンプル送液装置におけるサンプルチューブ判定方法。
2 撹拌ユニット
3 エアシリンダ
4 液面検出センサ
5 加圧送液部
6 サンプルライン
21 チューブホルダ
22 サンプルチューブ
23 設置台
24 モータ
25 マグネット
26 マグネット
27、28 ギア
29 圧力遮断壁
31 加圧シリンダ
32 昇降シリンダ
41 光照射部
42 光検出部
51 ノズル
52 加圧シェル
53 気密保持用Oリング
100 微小粒子測定装置
211 遮光部
212 光透過部
Claims (8)
- 光を照射する光照射部と、
前記光を検出する光検出部と、
収容されたサンプルチューブの側面に照射される前記光を遮光する遮光部及び前記光が通過可能な一対の光透過部を有するチューブホルダと、を備えるサンプル送液装置。 - 前記遮光部に対する光照射により前記チューブホルダを側面の周方向に回転する駆動部を更に備える請求項1記載のサンプル送液装置。
- 前記光検出部により検出される前記光の光量により前記サンプルチューブ内のサンプルの残量を判定する制御部を備える請求項2記載のサンプル送液装置。
- 前記光の光路と、前記一対の光透過部間の直線と、が重なるように前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの形状に応じて異なる請求項3記載のサンプル送液装置。
- 前記光路と、前記直線と、が重なるように前記駆動部が前記チューブホルダを回転させる角度が、前記チューブホルダが収容可能なサンプルチューブの容積に応じて異なる請求項4記載のサンプル送液装置。
- 前記駆動部に取り付けられた第1のマグネットと、
該第1のマグネットとは離隔し且つ対向して設けられ、前記チューブホルダの底部に位置し、前記第1のマグネットの磁力作用により回転する第2のマグネットと、を更に備える請求項5記載のサンプル送液装置。 - 請求項6記載のサンプル送液装置が連結されたフローサイトメータ。
- 光照射により、チューブホルダの有無を判定し、
光が通過するまで前記チューブホルダを回転し、
光が通過する前記チューブホルダの回転角度を検出し、
前記回転角度に応じて前記チューホルダに収容されたサンプルチューブの形状を判定する手順を含む、サンプル送液装置におけるサンプルチューブ判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012113657A JP6003212B2 (ja) | 2012-05-17 | 2012-05-17 | サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012113657A JP6003212B2 (ja) | 2012-05-17 | 2012-05-17 | サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013242156A true JP2013242156A (ja) | 2013-12-05 |
| JP2013242156A5 JP2013242156A5 (ja) | 2015-02-26 |
| JP6003212B2 JP6003212B2 (ja) | 2016-10-05 |
Family
ID=49843186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012113657A Expired - Fee Related JP6003212B2 (ja) | 2012-05-17 | 2012-05-17 | サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6003212B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017158947A1 (ja) * | 2016-03-14 | 2017-09-21 | ソニー株式会社 | 容器用ラック、撹拌装置及び微小粒子測定装置 |
| WO2018179647A1 (ja) | 2017-03-31 | 2018-10-04 | ソニー株式会社 | 流路ユニット及び微小粒子分析装置 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5342796A (en) * | 1976-09-29 | 1978-04-18 | Sumitomo Electric Ind Ltd | Gathering method for blood serum |
| JPS5459198A (en) * | 1977-10-19 | 1979-05-12 | Nippon Tectron Kk | Automatic clinic chemical analyzer |
| US4927545A (en) * | 1988-10-06 | 1990-05-22 | Medical Automation Specialties, Inc. | Method and apparatus for automatic processing and analyzing of blood serum |
| JPH0575663U (ja) * | 1992-03-16 | 1993-10-15 | 株式会社日立製作所 | 自動分注装置 |
| WO1994013402A1 (en) * | 1992-12-04 | 1994-06-23 | Eurogenetics N.V. | Microtitre cups for performing immunological tests and automated device therefor |
| JPH1096734A (ja) * | 1996-09-24 | 1998-04-14 | Hitachi Ltd | 分析システム |
| JP2000009736A (ja) * | 1998-06-24 | 2000-01-14 | Aloka Co Ltd | 分注装置 |
| JP2002286424A (ja) * | 2001-03-23 | 2002-10-03 | Hitachi Ltd | 検出対象の寸法を自動的に検出する装置及びそれを用いた自動分析装置 |
| JP2003508782A (ja) * | 1999-09-08 | 2003-03-04 | コールター インターナショナル コーポレイション | 液体を吸引及び分配するための改良された方法及び装置 |
| JP2003083985A (ja) * | 2001-09-11 | 2003-03-19 | Aloka Co Ltd | ラベル読み取り装置及び方法 |
| JP2004061173A (ja) * | 2002-07-25 | 2004-02-26 | Sysmex Corp | 試料調製装置とそれを用いた試料分析装置 |
| JP2005127861A (ja) * | 2003-10-23 | 2005-05-19 | Aloka Co Ltd | 分注装置 |
| JP2008026057A (ja) * | 2006-07-19 | 2008-02-07 | Aloka Co Ltd | 分注装置 |
-
2012
- 2012-05-17 JP JP2012113657A patent/JP6003212B2/ja not_active Expired - Fee Related
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5342796A (en) * | 1976-09-29 | 1978-04-18 | Sumitomo Electric Ind Ltd | Gathering method for blood serum |
| JPS5459198A (en) * | 1977-10-19 | 1979-05-12 | Nippon Tectron Kk | Automatic clinic chemical analyzer |
| US4927545A (en) * | 1988-10-06 | 1990-05-22 | Medical Automation Specialties, Inc. | Method and apparatus for automatic processing and analyzing of blood serum |
| JPH0575663U (ja) * | 1992-03-16 | 1993-10-15 | 株式会社日立製作所 | 自動分注装置 |
| WO1994013402A1 (en) * | 1992-12-04 | 1994-06-23 | Eurogenetics N.V. | Microtitre cups for performing immunological tests and automated device therefor |
| JPH1096734A (ja) * | 1996-09-24 | 1998-04-14 | Hitachi Ltd | 分析システム |
| JP2000009736A (ja) * | 1998-06-24 | 2000-01-14 | Aloka Co Ltd | 分注装置 |
| JP2003508782A (ja) * | 1999-09-08 | 2003-03-04 | コールター インターナショナル コーポレイション | 液体を吸引及び分配するための改良された方法及び装置 |
| JP2002286424A (ja) * | 2001-03-23 | 2002-10-03 | Hitachi Ltd | 検出対象の寸法を自動的に検出する装置及びそれを用いた自動分析装置 |
| JP2003083985A (ja) * | 2001-09-11 | 2003-03-19 | Aloka Co Ltd | ラベル読み取り装置及び方法 |
| JP2004061173A (ja) * | 2002-07-25 | 2004-02-26 | Sysmex Corp | 試料調製装置とそれを用いた試料分析装置 |
| JP2005127861A (ja) * | 2003-10-23 | 2005-05-19 | Aloka Co Ltd | 分注装置 |
| JP2008026057A (ja) * | 2006-07-19 | 2008-02-07 | Aloka Co Ltd | 分注装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017158947A1 (ja) * | 2016-03-14 | 2017-09-21 | ソニー株式会社 | 容器用ラック、撹拌装置及び微小粒子測定装置 |
| US11338259B2 (en) | 2016-03-14 | 2022-05-24 | Sony Corporation | Vessel rack, agitator, and fine particle measurement apparatus |
| WO2018179647A1 (ja) | 2017-03-31 | 2018-10-04 | ソニー株式会社 | 流路ユニット及び微小粒子分析装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6003212B2 (ja) | 2016-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10934513B2 (en) | Fully automated continuous cell culture system | |
| JP6075979B2 (ja) | 粒子計数システム | |
| CN1745305A (zh) | 带监视功能的分注装置和分注装置的监视方法 | |
| JP2019516959A (ja) | 密閉液滴ソータ及びその使用方法 | |
| JP2019500038A5 (ja) | ||
| JP2015520396A (ja) | 粒子特性評価 | |
| CN101074914A (zh) | 尿中粒子分析仪及其方法 | |
| KR102102285B1 (ko) | 미생물 평가 시스템 | |
| US10316346B2 (en) | Method and apparatus for dispersion of microbes in a liquid suspension | |
| US8951783B2 (en) | Detector for chemical compounds | |
| WO2014057713A1 (ja) | スクリーニング装置およびスクリーニング方法 | |
| US20070231206A1 (en) | Sample measuring apparatus and sample measuring method | |
| JP2014020918A (ja) | 微小粒子測定装置及び微小粒子分析方法 | |
| JP6003212B2 (ja) | サンプル送液装置、フローサイトメータ及びサンプルチューブ判定方法 | |
| CN206095303U (zh) | 一种导爆管药量和线径视觉检测装置及系统 | |
| ES2435393T3 (es) | Citómetro | |
| JP2005265495A (ja) | 細胞分析装置および方法 | |
| JP2019197035A (ja) | 撹拌装置、分析装置、分注方法 | |
| WO2015178124A1 (ja) | 粒子分析装置 | |
| CN112313324B (zh) | 细胞培养装置、细胞培养方法和存储介质 | |
| JP6727062B2 (ja) | 検出方法および検出装置 | |
| CN1934436B (zh) | 改善的探测装置 | |
| JP2007256208A (ja) | 吸光度測定装置及び特定物質の有無判定装置 | |
| WO2023149206A1 (ja) | 粒子径分布測定装置、粒子径分布測定方法、粒子径分布測定装置用プログラム及び粒子径分布測定装置用キット | |
| CN110320152A (zh) | 流式细胞仪和粒子检测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160324 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160822 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6003212 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |