JP2013237407A - シート位置制御装置 - Google Patents
シート位置制御装置 Download PDFInfo
- Publication number
- JP2013237407A JP2013237407A JP2012112855A JP2012112855A JP2013237407A JP 2013237407 A JP2013237407 A JP 2013237407A JP 2012112855 A JP2012112855 A JP 2012112855A JP 2012112855 A JP2012112855 A JP 2012112855A JP 2013237407 A JP2013237407 A JP 2013237407A
- Authority
- JP
- Japan
- Prior art keywords
- seat
- driving
- boarding
- electric seat
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 44
- 238000000034 method Methods 0.000 description 10
- 210000002414 leg Anatomy 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 210000003371 toe Anatomy 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 210000002683 foot Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images





Landscapes
- Seats For Vehicles (AREA)
Abstract
【課題】乗員の乗降時に、その乗員の体格に応じて乗降が容易となる最適位置に電動シートを短時間で移動させるシート位置制御装置を提供する。
【解決手段】シート位置制御装置1は、電動シート2の現在の位置を検出する位置検出手段3と、電動シートを駆動してその位置を調整する位置調整手段4と、車両の運転状態を検出する運転検出手段5と、運転検出手段により前記車両が運転状態であると検知されたときに、位置検出手段により検出した電動シートの位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する乗降位置設定手段6と、運転検出手段により車両の運転停止が検知されたとき、乗降位置設定手段により記憶された最適乗降位置を読出し、電動シートを最適乗降位置に移動させる乗降位置制御手段7と、を備える。
【選択図】図1
【解決手段】シート位置制御装置1は、電動シート2の現在の位置を検出する位置検出手段3と、電動シートを駆動してその位置を調整する位置調整手段4と、車両の運転状態を検出する運転検出手段5と、運転検出手段により前記車両が運転状態であると検知されたときに、位置検出手段により検出した電動シートの位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する乗降位置設定手段6と、運転検出手段により車両の運転停止が検知されたとき、乗降位置設定手段により記憶された最適乗降位置を読出し、電動シートを最適乗降位置に移動させる乗降位置制御手段7と、を備える。
【選択図】図1
Description
本発明は、車両シートに用いられるシート位置制御装置に関し、詳しくは、乗員の乗降時に、乗降が容易となる位置に電動シートを短時間に移動させるシート位置制御装置に関する。
従来、乗員の運転等に最適なように、モータ等により座席の位置を前後に動かしたり座面の高さを変えたりする電動シートが用いられている。乗員が予め設定したシート位置を記憶しておき、シート位置が変更された場合にも、記憶されている位置に復帰させることができる電動シートも知られている。また、このような電動シートにおいて、乗員の乗降時には、脚を動かすための空間を確保して乗降を容易にするために、シートを後方に移動させる手法が知られている。
例えば、特許文献1には、運転ポジションと乗降ポジションとが設定され、乗員の乗降時にはシートを所定の初期位置(乗降ポジション)まで後方移動させ、シートベルト装着時にシートを運転用の位置(運転ポジション)に前方移動させるシート位置制御装置の発明が開示されている。
例えば、特許文献1には、運転ポジションと乗降ポジションとが設定され、乗員の乗降時にはシートを所定の初期位置(乗降ポジション)まで後方移動させ、シートベルト装着時にシートを運転用の位置(運転ポジション)に前方移動させるシート位置制御装置の発明が開示されている。
前記のように、車両の乗員により予め設定された電動シートの運転位置(運転ポジション)を記憶して、運転開始時には当該運転ポジションに電動シートを移動させるシート位置制御装置が知られている。そして、前記特許文献1に記載されたシート制御方法では、運転者が乗車する前あるいは降車時に、シートを後方の所定位置(乗降ポジション)に移動させることが可能にされている。
しかし、通常、車両シートの運転ポジションは乗員の体格によって異なっており、乗員が容易に乗車・降車可能なシートの乗降ポジションも、乗員の体格により異なる。このため、乗降時に車両シートを後方端に移動させる等、乗降ポジションを一定としたのでは、乗員にとって乗降に最適な位置とはならないという問題があった。また、乗員の体格によってはシートを僅かに後方移動するだけで降車に最適な位置となるにもかかわらず、一定の乗降ポジションまでシートを余分に移動させることとなり、乗員にとっては、電動シートの移動完了まで余分な待ち時間が生じるという問題があった。
しかし、通常、車両シートの運転ポジションは乗員の体格によって異なっており、乗員が容易に乗車・降車可能なシートの乗降ポジションも、乗員の体格により異なる。このため、乗降時に車両シートを後方端に移動させる等、乗降ポジションを一定としたのでは、乗員にとって乗降に最適な位置とはならないという問題があった。また、乗員の体格によってはシートを僅かに後方移動するだけで降車に最適な位置となるにもかかわらず、一定の乗降ポジションまでシートを余分に移動させることとなり、乗員にとっては、電動シートの移動完了まで余分な待ち時間が生じるという問題があった。
本発明は、上記現状に鑑みてなされたもので、乗員の乗降時に、その乗員の乗降が容易となる最適位置に電動シートを短時間で移動させるシート位置制御装置を提供することを目的とする。
前記問題点を解決するために、本第1発明は、乗員が車両に乗降する際の電動シートの位置を調節するシート位置制御装置であって、前記電動シートの現在の位置を検出する位置検出手段と、前記電動シートを駆動してその位置を調整する位置調整手段と、前記車両の運転状態を検出する運転検出手段と、前記運転検出手段により前記車両が運転状態であると検知されたときに、前記位置検出手段により検出した前記電動シートの位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する乗降位置設定手段と、前記運転検出手段により前記車両の運転停止が検知されたとき、前記乗降位置設定手段により記憶された前記最適乗降位置を読出し、前記位置調整手段により前記電動シートを前記最適乗降位置に移動させる乗降位置制御手段と、を備えることを要旨とする。
本第2発明は、前記第1発明において、前記乗降位置設定手段は、検出した前記電動シートの現在の位置に基づき着座した乗員の体格を推定し、その推定した体格に対応する前記最適乗降位置を設定することを要旨とする。
本第3発明は、前記第1発明及び前記第2発明において、前記乗降位置設定手段は、前記運転検出手段により前記車両が運転状態であると検知された後、前記位置検出手段により検出される前記電動シートの位置が所定時間以上変化しないときに、前記最適乗降位置を設定することを要旨とする。
本第4発明は、前記第1乃至第3発明のいずれかにおいて、前記乗降位置設定手段は、前記位置検出手段により前記電動シートの座面高さの位置を検知し、その検知した位置に基づいて前記最適乗降位置を設定することを要旨とする。
本第5発明は、前記第1乃至第4発明のいずれかにおいて、前記運転検出手段により検知する運転状態は、イグニッションスイッチの状態及びシフトレバーの位置のうちの1つ以上を含むことを要旨とする。
本第2発明は、前記第1発明において、前記乗降位置設定手段は、検出した前記電動シートの現在の位置に基づき着座した乗員の体格を推定し、その推定した体格に対応する前記最適乗降位置を設定することを要旨とする。
本第3発明は、前記第1発明及び前記第2発明において、前記乗降位置設定手段は、前記運転検出手段により前記車両が運転状態であると検知された後、前記位置検出手段により検出される前記電動シートの位置が所定時間以上変化しないときに、前記最適乗降位置を設定することを要旨とする。
本第4発明は、前記第1乃至第3発明のいずれかにおいて、前記乗降位置設定手段は、前記位置検出手段により前記電動シートの座面高さの位置を検知し、その検知した位置に基づいて前記最適乗降位置を設定することを要旨とする。
本第5発明は、前記第1乃至第4発明のいずれかにおいて、前記運転検出手段により検知する運転状態は、イグニッションスイッチの状態及びシフトレバーの位置のうちの1つ以上を含むことを要旨とする。
本発明のシート位置制御装置によれば、電動シートの現在の位置を検出する位置検出手段と、電動シートを駆動してその位置を調整する位置調整手段と、車両の運転状態を検出する運転検出手段と、車両が運転状態であると検知されたときの電動シートの位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する乗降位置設定手段と、車両の運転停止が検知されたとき、電動シートを記憶された最適乗降位置に移動させる乗降位置制御手段と、を備えるため、乗員が乗降する際にはその乗員の運転中のシート位置に基づいて設定された最適乗降位置に電動シートを移動させ、乗員の乗降のために必要充分な空間を設けることができる。また、乗降時に、電動シートはその移動範囲の後方端等、一定の位置まで移動されないため、電動シートの余分な移動及び移動時間を減らすことができ、乗員は余分な待ち時間なく乗降することができる。
前記乗降位置設定手段が、検出した電動シートの現在の位置に基づき着座した乗員の体格を推定し、その推定した体格に対応する前記最適乗降位置を設定する場合には、乗員が乗降する際に、電動シートが乗員の体格に応じた最適乗降位置に移動されることとなる。例えば、運転時のシート位置から乗員が小柄の体格であると推定される場合には、降車時のシート座面を大幅に低くし、乗員が大柄の体格であると推定される場合には、降車時のシート座面の高さを適正に保つことができる。これにより、乗員の体格に応じて、乗降時につま先が床等に接触して動き易い位置であり、且つ乗降動作がステアリングホイール等と干渉しないような位置に、電動シートを移動させることができる。
前記乗降位置設定手段が、前記運転検出手段により車両が運転状態であると検知された後、前記位置検出手段により検出される電動シートの位置が所定時間以上変化しないときに、前記最適乗降位置を設定する場合には、乗員により最適な運転位置にシートが調節され且つ安定に運転されている状態のシート位置を取得することができる。そして、そのシート位置によって乗員の体格を推定し、その体格に基づいて最適乗降位置を求めるため、乗降時のシート位置をより適切に設定することができる。
前記乗降位置設定手段が、前記位置検出手段により電動シートの座面高さの位置を検知し、その検知した位置に基づいて前記最適乗降位置を設定する場合には、乗員が乗降時に姿勢を変えるときの負担を軽減すると共に膝部等がハンドル等にぶつからないように、最適乗降位置を設定することができる。
前記運転検出手段により検知する運転状態が、イグニッションスイッチの状態及びシフトレバーの位置のうちの1つ以上を含む場合は、車両が運転可能な状態であるか否かを確実に判断することができるため、運転状態のシート位置の検出や乗降位置へのシート移動のタイミングをより適切にすることが可能になる。
本発明について、本発明による典型的な実施形態の非限定的な例を挙げ、言及された複数の図面を参照しつつ以下の詳細な記述によって更に説明するが、同様の参照符号は図面のいくつかの図を通して同様の部品を示す。
本シート位置制御装置の構成を説明するためのブロック図である。
本シート位置制御装置が設けられている車両用電動シートを示す模式図である。
本シート位置制御装置による車両用電動シートの位置調節を説明するための模式図である。
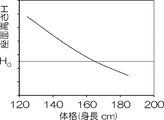
運転状態における車両用電動シートの位置(座面高さH)から乗員の体格(身長)を推定する例を表わすグラフである。
推定された乗員の体格(身長)から最適乗降位置(座面高さH’)を求める例を表わすグラフである。
シート位置制御装置における制御例を示すフローチャートである。
以下、図1〜6を参照しながら本発明のシート位置制御装置を詳しく説明する。
ここで示される事項は例示的なもの及び本発明の実施形態を例示的に説明するためのものであり、本発明の原理と概念的な特徴とを最も有効に且つ難なく理解できる説明であると思われるものを提供する目的で述べたものである。この点で、本発明の根本的な理解のために必要である程度以上に本発明の構造的な詳細を示すことを意図してはおらず、図面と合わせた説明によって本発明の幾つかの形態が実際にどのように具現化されるかを当業者に明らかにするものである。
ここで示される事項は例示的なもの及び本発明の実施形態を例示的に説明するためのものであり、本発明の原理と概念的な特徴とを最も有効に且つ難なく理解できる説明であると思われるものを提供する目的で述べたものである。この点で、本発明の根本的な理解のために必要である程度以上に本発明の構造的な詳細を示すことを意図してはおらず、図面と合わせた説明によって本発明の幾つかの形態が実際にどのように具現化されるかを当業者に明らかにするものである。
(シート位置制御装置の構成)
本実施形態に係るシート位置制御装置は、乗員が車両に乗降する際の電動シートの位置を調節する装置であって、図1に例示するように、電動シート2の位置検出手段3、電動シート2の位置調整手段4、運転検出手段5、乗降位置設定手段6及び乗降位置制御手段7を備えている。
本実施形態に係るシート位置制御装置は、乗員が車両に乗降する際の電動シートの位置を調節する装置であって、図1に例示するように、電動シート2の位置検出手段3、電動シート2の位置調整手段4、運転検出手段5、乗降位置設定手段6及び乗降位置制御手段7を備えている。
前記電動シート2の用途や種類は特に問わず、本シート位置制御装置1は任意の車両用の電動シートを対象とする。シート位置制御装置1は、特に自動車の運転席、助手席、後部座席等として設けられる電動シートに好適に用いることができる。このような電動シートには、座面を上下及び前後に移動させるリフタ機構、車両の前後方向にシートを移動させるスライド機構、背もたれの角度を変えるリクライニング機構等が適宜備えられ、それぞれの機構がモータ等の動力により調節可能とされている。
シート位置制御装置1により調節される電動シート2の位置は、電動シート2に設けられた調節可能な部分のうち、乗員の乗降を便利にするための1以上の位置とすることができる。例えば、シート位置制御装置1による調節対象として、車室床面に対する座面の上下方向の位置(座面高さ)を挙げることができる。また、前後方向のシート位置(前後位置)等を挙げることができる。その他、電動シート2の位置として、座面の傾斜、リクライニング角度等を含めることができる。シート位置制御装置1は、電動シート2のこれらの調節部分のうちの1つのみの位置を制御するように構成されてもよいし、2以上の位置を制御するように構成されてもよい。
前記位置検出手段3は、シート位置制御装置1が調節対象とする、電動シート2の位置を検出するための手段である。その具体的な構成は任意に選択することができる。例えば、電動シート2に位置センサを設けて位置検出を行ってもよいし、電動シート2を移動させるためのモータに回転センサを備え、位置センサと組み合わせて電動シートの位置を算出するようにしてもよい。その他、一般に電動シートに設けられている位置検出手段を利用することができる。
前記位置調整手段4は、電動シート2の各種調節部分を駆動するモータ等、その駆動回路及び制御回路を備えて構成され、通常の電動シートに用いられている構成とすることができる。
電動シートには一般に手動操作用のスイッチが備えられており、乗員はそのスイッチを用いてシートの前後位置や座面高さ等を調節することができる。この手動操作用スイッチによるシート位置の調整は、位置調整手段4に組み込まれていてもよいし、別途に電動シート2が駆動されてもよい。
電動シートには一般に手動操作用のスイッチが備えられており、乗員はそのスイッチを用いてシートの前後位置や座面高さ等を調節することができる。この手動操作用スイッチによるシート位置の調整は、位置調整手段4に組み込まれていてもよいし、別途に電動シート2が駆動されてもよい。
前記運転検出手段5は、車両が運転状態であるかどうかを検知するための手段である。運転状態とは、車両が運転されている状態又は車両が運転可能な状態であることを意図している。車両が運転状態であるときは、乗員が適切なシート位置(運転ポジション)で着席していると判断することができる。また、車両が停止され、乗員がシートベルトを外したりドアを開いたりしたときには、乗員が降車すると判断することができる。このような判断のために有用な情報として、イグニッションスイッチの状態、シフトレバーの位置、シートベルトの装着有無、車速、ドアロックの有無、ドア開閉、ステアリングホイールのチルト状態等を運転状態として挙げることができる。
上記のうち、運転検出手段5により検知する運転状態は、イグニッションスイッチの状態及びシフトレバーの位置のうちの1つ以上を含むものとすることができる。例えば、イグニッションスイッチがオンであれば、車両は運転可能な状態にあると判断することができる。また、シフトレバーの位置が、パーキング、ニュートラル以外になっているときには、運転中であるか運転準備が完了している状態にあると判断することができる。
運転検出手段5は、各種センサを備えることにより上記の各種状態を検出するように構成されてもよいし、外部装置(ECU)からその状態の情報を受け取るように構成されてもよい。
運転検出手段5は、各種センサを備えることにより上記の各種状態を検出するように構成されてもよいし、外部装置(ECU)からその状態の情報を受け取るように構成されてもよい。
前記乗降位置設定手段6は、運転検出手段5により車両が運転状態であると検知されたときに、位置検出手段3により検出した電動シート2の位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する手段である。最適乗降位置は、電動シート2の可動範囲内において乗員が車両の乗降のために支障なく動くことができるよう座席周辺の空間が確保されている電動シート2位置であり、乗員の体格、電動シート2の前後位置、電動シート2の座面高さ、電動シート2とステアリングホイールとの距離、ステアリングホイールのチルト状態等により決定することができる。また、この最適乗降位置は、通常電動シート2の可動範囲内の一端に位置しないため、乗降時に一端まで移動する場合と比べて移動量及び移動時間を短縮することができる。
このため、乗降位置設定手段6は、運転検出手段5により車両が運転状態であると検知されたとき、位置検出手段3により電動シート2の現在位置(運転ポジション)を検出するように構成される。この電動シート2の運転ポジションから、乗員の体格を推定することができる。乗員の体格として、例えば、身長、足の長さ、座高等を挙げることができる。乗員が運転姿勢をとるときには、ペダルまでの距離やステアリングホイールまでの距離によりシート位置を調整するため、運転ポジションは乗員の体格と関連している。したがって、乗降位置設定手段6は、乗員が適切な運転姿勢をとったときのシート位置(座面高さ、前後位置等)に基づいて、乗員の体格を推定するように構成することができる。
そして、乗降位置設定手段6は、前記推定した乗員の体格に対応する最適乗降位置を設定(導出)し、それを記憶するように構成される。すなわち、乗降位置設定手段6は、乗員の体格により、乗員の足先が車両の床面に接して無理が掛からない姿勢で踏みこたえることができるような電動シート2の座面高さや、乗員の脚部がステアリングホイールに阻まれることなく動かせる空間を確保するような座面高さ・前後位置を、最適乗降位置として導出する。最適乗降位置は、電動シート2の用途毎に異なる位置とすることができる。運転席、助手席、後部座席等によって周囲空間が異なり、乗員の乗降動作に影響する車内設備等も異なるからである。
乗員の体格の推定方法、及び体格からの最適乗降位置の決定方法は特に問わない。例えば、予め様々な体格の乗員について実際の運転状態と乗降時とにおけるシート位置を調査して、その調査結果に基づいて、運転ポジションから最適乗降位置を導出するための換算式、対応表等を作成することができる。乗降位置設定手段6は、その対応表等を参照することによって、運転状態におけるシート位置から最適乗降位置を導出するように構成することができる。
乗降位置設定手段6は、例えば、電動シート2の座面高さを検知し、その検知した座面高さの位置から最適乗降位置を導出するように構成することができる。また、電動シート2の座面高さ及び前後位置のうちの少なくとも1つの位置を検知し、その検知した位置に基づいて最適乗降位置を設定するように構成されてもよい。
乗降位置設定手段6は、例えば、電動シート2の座面高さを検知し、その検知した座面高さの位置から最適乗降位置を導出するように構成することができる。また、電動シート2の座面高さ及び前後位置のうちの少なくとも1つの位置を検知し、その検知した位置に基づいて最適乗降位置を設定するように構成されてもよい。
また、乗降位置設定手段6は、運転検出手段5により車両が運転状態であると検知された後、位置検出手段3により検出される電動シートの位置が所定時間以上変化しないときに、最適乗降位置を設定するように構成することができる。それにより、乗員が電動シートの位置を手動調整しているときに位置検出を行うことがないようにすることができる。
乗降位置制御手段7は、運転検出手段5により車両の運転停止が検知されたとき、乗降位置設定手段6により記憶された最適乗降位置を読み出し、位置調整手段4により電動シート2を最適乗降位置に移動させる手段である。
以上に説明した位置検出手段3、位置調整手段4、運転検出手段5、乗降位置設定手段6及び乗降位置制御手段7は、ハードウェアのみで構成されてもよいし、マイクロプロセッサ等を使用してハードウェアとソフトウェアとによって構成されてもよい。好適には、CPU、メモリ(ROM、RAM)、入出力回路等を備えるマイクロコントローラ(マイクロコンピュータ)及び周辺回路によって構成することができる。これに限らず、プログラム可能な論理回路、ゲートアレーその他の論理回路によって構成されてもよい。
シート位置制御装置1には、図示しない電源により必要な電力が供給される。例えば、シート位置制御装置1及び電動シート2は、車両のバッテリから給電を受けるようにすることができる。
シート位置制御装置1には、図示しない電源により必要な電力が供給される。例えば、シート位置制御装置1及び電動シート2は、車両のバッテリから給電を受けるようにすることができる。
(シート位置制御装置の動作及び制御)
図2及び図3は、車両の運転席に備えられる電動シート2の例を示している。本例の電動シート2は、シートの前後方向の位置と、座面21の高さを調節することができるようにされている。
図3は、シート位置制御装置1による電動シート2の作動を説明する図である。電動シート2の座面21の下端22から上端23までの高さを座面高さHとする。また、電動シート2の前後方向の可動範囲の前端24から座面21の前端までの距離Wにより、シートの前後位置Wと表わす。図3において、電動シート2の位置(座面高さH、前後位置W)は、ある乗員の適正な運転ポジションを示しており、電動シート2’の位置(座面高さH’、前後位置W’)は最適乗降位置である乗降ポジションであり、その乗員にとって脚部がステアリングホイール8により阻まれることなく動かせる空間が確保されている。尚、この電動シートの可動範囲の一端は、電動シート2’の位置よりも更に後方に位置する。
図2及び図3は、車両の運転席に備えられる電動シート2の例を示している。本例の電動シート2は、シートの前後方向の位置と、座面21の高さを調節することができるようにされている。
図3は、シート位置制御装置1による電動シート2の作動を説明する図である。電動シート2の座面21の下端22から上端23までの高さを座面高さHとする。また、電動シート2の前後方向の可動範囲の前端24から座面21の前端までの距離Wにより、シートの前後位置Wと表わす。図3において、電動シート2の位置(座面高さH、前後位置W)は、ある乗員の適正な運転ポジションを示しており、電動シート2’の位置(座面高さH’、前後位置W’)は最適乗降位置である乗降ポジションであり、その乗員にとって脚部がステアリングホイール8により阻まれることなく動かせる空間が確保されている。尚、この電動シートの可動範囲の一端は、電動シート2’の位置よりも更に後方に位置する。
車両の運転開始時には、乗員は自己の体格に合わせて電動シート2の位置を調整し、最適な位置(運転ポジションH、W)に設定する。運転ポジションへの移動は、乗員が手動でスイッチを操作して行う他、別途のシステムにより自動的に移動されてもよい。
この運転ポジション(H、W)は、位置検出手段3によって検出することができる。運転ポジションの検出は、運転開始時等の乗員による調整が終了した後に行うことが好ましい。このため、乗降位置設定手段6は、車両が運転可能な状態となってから、電動シートの位置が所定時間以上変化しないことを確認した後、運転ポジションを検出するようにすることができる。
この運転ポジション(H、W)は、位置検出手段3によって検出することができる。運転ポジションの検出は、運転開始時等の乗員による調整が終了した後に行うことが好ましい。このため、乗降位置設定手段6は、車両が運転可能な状態となってから、電動シートの位置が所定時間以上変化しないことを確認した後、運転ポジションを検出するようにすることができる。
乗降位置設定手段6は、位置検出手段3により運転ポジションにおける座面高さH、前後位置W等を検出する。そして、その位置に基づいて乗員の体格を推定する。例えば、図4は、座面高さHから乗員の身長(体格)を推定するためのグラフを表わしている。図の縦軸は座面高さHを表わし、基点H0は標準的な体格の乗員における運転時の適切な座面高さを表す。電動シートの座面高さHは、本例では、基点H0から上方に35mm程度、下方に25mm程度の範囲で移動可能とされている。図の横軸は乗員の体格(身長)を表わしている。
通常、乗員の身長が標準より低い場合には、運転ポジションにおける座面高さHが基点H0よりも高い位置とされ、身長が標準より高い場合には、座面高さHが基点H0よりも低い位置とされる。このような関係は、多数の乗員について実験等を行うことによって得ることができる。このような座面高さHと乗員の体格との一般的な関係をテーブルとして、予めシート位置制御装置1内に記憶しておくことにより、乗降位置設定手段6は、そのテーブルを用いて座面高さHから乗員の体格を推定することができる。体格を推定するためには、座面高さHの他、前後位置W等を用いてもよいし、それらを組み合わせて体格を推定してもよい。
通常、乗員の身長が標準より低い場合には、運転ポジションにおける座面高さHが基点H0よりも高い位置とされ、身長が標準より高い場合には、座面高さHが基点H0よりも低い位置とされる。このような関係は、多数の乗員について実験等を行うことによって得ることができる。このような座面高さHと乗員の体格との一般的な関係をテーブルとして、予めシート位置制御装置1内に記憶しておくことにより、乗降位置設定手段6は、そのテーブルを用いて座面高さHから乗員の体格を推定することができる。体格を推定するためには、座面高さHの他、前後位置W等を用いてもよいし、それらを組み合わせて体格を推定してもよい。
図5は、前図と同じ電動シートにおける乗員の体格と最適な乗降ポジションとの関係を例示している。図の縦軸は乗降ポジションにおける座面高さH’即ち最適乗降位置を表わし、横軸は乗員の体格(身長)を表わしている。基点H0は、前図の場合と同じである。
通常、乗員の身長が標準より低い場合には、乗降ポジションにおける座面高さH’を基点H0よりも大幅に低い位置とするのが適切である。本例では、身長130cm未満の場合、座面高さH’は電動シートの可動範囲の下端となっている。一方、本電動シートにおいては、乗員の身長が標準より高い場合には、座面高さH’を基点H0よりもやや低い程度の位置とするのが適切である。このような関係は、多数の乗員について実験等を行うことによって得ることができる。このような乗員の体格と最適乗降位置との一般的な関係をテーブルとして、予めシート位置制御装置1内に記憶しておくことにより、乗降位置設定手段6は、前記推定された乗員の体格から、そのテーブルを用いて最適乗降位置(座面高さH’)を求めることができる。本例では、最適乗降位置として座面高さH’を設定する例を示したが、前後位置W’等を求めてもよいし、それらを組み合わせて最適乗降位置を設定してもよい。乗降位置設定手段6は、設定した最適乗降位置をシート位置制御装置1内のメモリに記憶する。
通常、乗員の身長が標準より低い場合には、乗降ポジションにおける座面高さH’を基点H0よりも大幅に低い位置とするのが適切である。本例では、身長130cm未満の場合、座面高さH’は電動シートの可動範囲の下端となっている。一方、本電動シートにおいては、乗員の身長が標準より高い場合には、座面高さH’を基点H0よりもやや低い程度の位置とするのが適切である。このような関係は、多数の乗員について実験等を行うことによって得ることができる。このような乗員の体格と最適乗降位置との一般的な関係をテーブルとして、予めシート位置制御装置1内に記憶しておくことにより、乗降位置設定手段6は、前記推定された乗員の体格から、そのテーブルを用いて最適乗降位置(座面高さH’)を求めることができる。本例では、最適乗降位置として座面高さH’を設定する例を示したが、前後位置W’等を求めてもよいし、それらを組み合わせて最適乗降位置を設定してもよい。乗降位置設定手段6は、設定した最適乗降位置をシート位置制御装置1内のメモリに記憶する。
図4及び図5により、運転ポジションから乗員の体格を推定し、次にその体格から最適乗降位置を求める方法を説明したが、運転ポジションから直接に最適乗降位置を導出することができるのは言うまでもない。
車両の運転状態は、運転検出手段5により常時監視することができる。そして、車両の運転が終了したとき、電動シートを最適な乗降ポジションに移動する。このため、乗降位置制御手段7は、運転検出手段5により車両の運転が終了した(運転停止)と検知されたときに、乗降位置設定手段6により記憶された最適乗降位置をメモリから読出し、位置調整手段4によって電動シート2をその最適乗降位置(H’、W’)に移動させる。
図6は、シート位置制御装置1における制御方法の例を示すフローチャートである。
運転停止時に、乗員により電動シート2の手動操作スイッチが操作されたときは(ステップS1)、操作に対応する座面21の高さ又は前後位置をモータにより変更する(ステップS2)。この処理は位置調整手段4により行うようにすることができる。乗員の操作に代わり、別途の手段により自動的に電動シートの位置が調整されてもよい。
その後、運転検出手段5により、シフトレバーの位置、イグニッションスイッチの状態等を検出する(ステップS3、S4)。ここで、シフトレバーの位置がパーキング(P)レンジであるか、イグニッションスイッチがオンとされていない場合には、運転されていない状態(運転停止状態)と判断し、ステップS1に戻る。一方、シフトレバーの位置がパーキングレンジでなく、且つイグニッションスイッチがオンとされている場合には、車両が運転可能な状態(運転状態)と判断し、次のステップS5に進む。
運転停止時に、乗員により電動シート2の手動操作スイッチが操作されたときは(ステップS1)、操作に対応する座面21の高さ又は前後位置をモータにより変更する(ステップS2)。この処理は位置調整手段4により行うようにすることができる。乗員の操作に代わり、別途の手段により自動的に電動シートの位置が調整されてもよい。
その後、運転検出手段5により、シフトレバーの位置、イグニッションスイッチの状態等を検出する(ステップS3、S4)。ここで、シフトレバーの位置がパーキング(P)レンジであるか、イグニッションスイッチがオンとされていない場合には、運転されていない状態(運転停止状態)と判断し、ステップS1に戻る。一方、シフトレバーの位置がパーキングレンジでなく、且つイグニッションスイッチがオンとされている場合には、車両が運転可能な状態(運転状態)と判断し、次のステップS5に進む。
上記運転状態と判断された場合、乗降位置設定手段6は、電動シートが手動等で位置調整(前記ステップS1及びS2)された後、所定時間(例えば、30秒間)経過するのを待つ(ステップS5)。この所定時間の間に電動シートの位置が再び調整された場合は、前記ステップS1〜S5を繰り返すようにすることができる。すなわち、所定時間以上、電動シートの位置が変化しないことを確認する。車両が運転状態で、所定時間以上、電動シートの位置が調整されなければ、乗員は調整を完了して電動シートが最適な運転ポジションに調整されたと考えられるからである。
電動シートの位置が所定時間以上変化しなかったときには、乗降位置設定手段6は、位置検出手段3により現在の電動シートの位置(座面高さH、前後位置W等)を検出する(ステップS6)。そして、検出された位置に基づき乗員の体格を推定し(ステップS7)、その体格に対応した最適乗降位置(座面高さH’、前後位置W’等)を求めて記憶する(ステップS8)。前記のとおり、検出された位置から直接に最適乗降位置を求めることもできる。
次に、シート位置制御装置1は、車両の運転状態が継続されているかを監視する。車両が運転状態であるか否かは、運転検出手段5により適宜検知することができる。例えば、イグニッションスイッチの状態を監視して、イグニッションスイッチがオフとされたときは、車両の運転が終了したと判断することができる(ステップS9)。尚、イグニッションスイッチの状態の他、シートベルトの装着有無やドア開閉等の状態を加えて判断するようにしてもよい。
そして、運転が終了したと判断されたとき、乗降位置制御手段7は乗降位置設定手段6により記憶された最適乗降位置(座面高さH’、前後位置W’等)を読出し、位置調整手段4によりその最適乗降位置に電動シートを移動させる(ステップS10)。
そして、運転が終了したと判断されたとき、乗降位置制御手段7は乗降位置設定手段6により記憶された最適乗降位置(座面高さH’、前後位置W’等)を読出し、位置調整手段4によりその最適乗降位置に電動シートを移動させる(ステップS10)。
以上の手順により、運転停止時に最適乗降位置の座面高さH’、前後位置W’の位置に電動シートを移動させることができる。この位置は、乗員の体格に応じて、乗降時につま先が床等に接触し、ステアリングホイール8等に脚が当たり難い位置とすることができるため、乗員の乗降が容易となる。また、一律に可動範囲の後方等まで電動シートを移動させることがないので、過剰な移動に費やす時間を省いて短時間で乗降可能にすることができる。
尚、本発明においては、以上に示した実施形態に限られず、目的、用途に応じて本発明の範囲内で種々変更した態様とすることができる。
例えば、本シートのシート位置制御装置は、実施例に示した運転席に限らず、助手席等にも適用することができる。
例えば、本シートのシート位置制御装置は、実施例に示した運転席に限らず、助手席等にも適用することができる。
1;シート位置制御装置、2、2’;電動シート、21;座面、3;位置検出手段、4;位置調整手段、5;運転検出手段、6;乗降位置設定手段、7;乗降位置制御手段、9;乗員。
Claims (5)
- 乗員が車両に乗降する際の電動シートの位置を調節するシート位置制御装置であって、
前記電動シートの現在の位置を検出する位置検出手段と、
前記電動シートを駆動してその位置を調整する位置調整手段と、
前記車両の運転状態を検出する運転検出手段と、
前記運転検出手段により前記車両が運転状態であると検知されたときに、前記位置検出手段により検出した前記電動シートの位置に基づき、乗員の乗降に適した最適乗降位置を設定して記憶する乗降位置設定手段と、
前記運転検出手段により前記車両の運転停止が検知されたとき、前記乗降位置設定手段により記憶された前記最適乗降位置を読出し、前記位置調整手段により前記電動シートを前記最適乗降位置に移動させる乗降位置制御手段と、
を備えることを特徴とするシート位置制御装置。 - 前記乗降位置設定手段は、検出した前記電動シートの現在の位置に基づき着座した乗員の体格を推定し、その推定した体格に対応する前記最適乗降位置を設定する請求項1記載のシート位置制御装置。
- 前記乗降位置設定手段は、前記運転検出手段により前記車両が運転状態であると検知された後、前記位置検出手段により検出される前記電動シートの位置が所定時間以上変化しないときに、前記最適乗降位置を設定する請求項1又は2に記載のシート位置制御装置。
- 前記乗降位置設定手段は、前記位置検出手段により前記電動シートの座面高さの位置を検知し、その検知した位置に基づいて前記最適乗降位置を設定する請求項1乃至3のいずれか1項に記載のシート位置制御装置。
- 前記運転検出手段により検知する運転状態は、イグニッションスイッチの状態及びシフトレバーの位置のうちの1つ以上を含む請求項1乃至4のいずれか1項に記載のシート位置制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012112855A JP2013237407A (ja) | 2012-05-16 | 2012-05-16 | シート位置制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012112855A JP2013237407A (ja) | 2012-05-16 | 2012-05-16 | シート位置制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013237407A true JP2013237407A (ja) | 2013-11-28 |
Family
ID=49762828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012112855A Pending JP2013237407A (ja) | 2012-05-16 | 2012-05-16 | シート位置制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013237407A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015145758A1 (ja) * | 2014-03-28 | 2015-10-01 | 富士機械製造株式会社 | 介助ロボット |
| JP2020028720A (ja) * | 2019-10-10 | 2020-02-27 | 株式会社Fuji | 介助ロボット |
| JP2021531203A (ja) * | 2018-07-23 | 2021-11-18 | シアーズ・マニュファクチュアリング・カンパニーSears Manufacturing Company | 車両シート用能動的クッション形状調節 |
| JP2022106427A (ja) * | 2021-01-07 | 2022-07-20 | マツダ株式会社 | 降車支援装置および該方法 |
| WO2024009829A1 (ja) * | 2022-07-05 | 2024-01-11 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理方法および車両制御システム |
-
2012
- 2012-05-16 JP JP2012112855A patent/JP2013237407A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015145758A1 (ja) * | 2014-03-28 | 2015-10-01 | 富士機械製造株式会社 | 介助ロボット |
| JPWO2015145758A1 (ja) * | 2014-03-28 | 2017-04-13 | 富士機械製造株式会社 | 介助ロボット |
| JP2021531203A (ja) * | 2018-07-23 | 2021-11-18 | シアーズ・マニュファクチュアリング・カンパニーSears Manufacturing Company | 車両シート用能動的クッション形状調節 |
| JP2020028720A (ja) * | 2019-10-10 | 2020-02-27 | 株式会社Fuji | 介助ロボット |
| JP2022106427A (ja) * | 2021-01-07 | 2022-07-20 | マツダ株式会社 | 降車支援装置および該方法 |
| JP7589552B2 (ja) | 2021-01-07 | 2024-11-26 | マツダ株式会社 | 降車支援装置および該方法 |
| WO2024009829A1 (ja) * | 2022-07-05 | 2024-01-11 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理方法および車両制御システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9950644B2 (en) | Vehicle seat control apparatus | |
| CN102328605B (zh) | 车辆用座椅的控制装置 | |
| JP6112609B2 (ja) | 車両用シート装置 | |
| JP6582458B2 (ja) | ドライビングポジション制御装置 | |
| CN107531166B (zh) | 车辆用座椅系统 | |
| JP6629608B2 (ja) | 車両用シート制御装置 | |
| JP6654481B2 (ja) | 車両用シート装置 | |
| JP2008195323A (ja) | 車両用シート操作装置 | |
| JP5906865B2 (ja) | 車両用シート装置 | |
| US9511684B2 (en) | Vehicle seat control device and vehicle seat device | |
| CN109415007B (zh) | 车辆用座椅控制装置 | |
| JP2013237407A (ja) | シート位置制御装置 | |
| JP6928805B2 (ja) | 車両用シート装置 | |
| WO2014010364A1 (ja) | 車両の運転席用シート装置 | |
| JP6721688B2 (ja) | 車両用シート調整装置、位置調整制御装置、及び車両用シート調整方法 | |
| JP2017171175A (ja) | 車両用シートの退避動作制御方法及び制御装置 | |
| JP2023168135A (ja) | 車両用シート制御装置及び車両用シート | |
| JP2013244914A (ja) | シート位置制御装置 | |
| JP2019001315A (ja) | 車両用シート | |
| JP2011178206A (ja) | ヘッドレスト装置 | |
| JP5291573B2 (ja) | シート状態変更装置 | |
| JP5297051B2 (ja) | 車両用シート装置および車両用シート装置の制御方法 | |
| JP2017094893A (ja) | 車両のシート構造 | |
| JP5383078B2 (ja) | 座席制御装置 | |
| JP2004291792A (ja) | ステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140620 |