JP2012527770A - 太陽電池の輸送 - Google Patents
太陽電池の輸送 Download PDFInfo
- Publication number
- JP2012527770A JP2012527770A JP2012511875A JP2012511875A JP2012527770A JP 2012527770 A JP2012527770 A JP 2012527770A JP 2012511875 A JP2012511875 A JP 2012511875A JP 2012511875 A JP2012511875 A JP 2012511875A JP 2012527770 A JP2012527770 A JP 2012527770A
- Authority
- JP
- Japan
- Prior art keywords
- belt
- substrate
- retainer
- transport
- transport system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F71/00—Manufacture or treatment of devices covered by this subclass
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3212—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations the substrates to be conveyed not being semiconductor wafers or large planar substrates, e.g. chips or lead frames
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F19/00—Integrated devices, or assemblies of multiple devices, comprising at least one photovoltaic cell covered by group H10F10/00, e.g. photovoltaic modules
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3202—Mechanical details, e.g. rollers or belts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
Abstract
基板用輸送システムであって、基板をその上で受け取るための少なくとも1本のベルトと、ベルト上に離間距離で配置される保持器であって、その離間距離が少なくとも基板の幅と同程度に幅広く、基板が保持器にぶつかるときに、基板が摺動するのを妨げるのに十分である、ベルト上方の隆起まで上昇する保持器と、ベルトを移動するためのモータと、ベルトが加速するよりもベルトが速く減速するように、ベルトの非対称な加速および減速を提供し、それによって連続する加速サイクルおよび減速サイクルを通して保持器に対して基板を位置合わせするための運動コントローラとを有する輸送システム。
【選択図】図2
【選択図】図2
Description
本願は、2009年5月20日に出願された、先行の未決の米国仮出願番号第61/180,060号に対する利益および優先権に主張する。本発明は、太陽電池製造の分野に関する。すなわち、本発明は、製造中の太陽電池の輸送に関する。
太陽電池は、電池がある生産ステップから次の生産ステップへ、コンベヤベルトによってウェハ形式で運ばれる生産ラインで製造される。このベルトは絶え間なく動いているわけではないが、経路に沿って異なる処理ステップおよび検査ステップで停止する。
残念なことに、電池基板は、ステーションからステーションへの輸送の間にベルト上で摺動する傾向がある。極端な場合、基板がベルトから滑り落ち、汚染、損傷、または破壊されることもある。これは、基板が処理または検査の前に所望される位置に戻されるように、生産ステーションの内の多様なステーションでの―それが自動登録であっても、手動登録であっても―なんらかの種類の登録手続きを必要とする傾向がある。
この問題を克服するために、ベルトに対してしっかりと基板を引き付け、基板を望ましくない移動から制約する真空クランプシステムがコンベヤベルトに追加された。残念なことに、かかるシステムは、輸送システムをきわめて複雑且つ高価にする。
したがって、必要とされているのは、少なくとも部分的には前述された問題のような問題を克服するシステムである。
前記の、および他の必要性は、基板用輸送システムであって、その上で基板を受け取るための少なくとも1本のベルトと、ベルト上に離間された距離で配置される保持器であって、離間距離が少なくとも基板の幅と同程度に幅広く、基板が保持器にぶつかるときに基板が摺動するのを妨げるのに十分であるベルト上方の隆起まで上昇する保持器と、ベルトを移動するためのモータと、ベルトが加速するよりも速くベルトが減速するようにベルトの非対称の加速および減速を提供し、それによって連続する加速サイクルおよび減速サイクルを通して保持器に対して基板を位置合わせする運動コントローラとを有する輸送システムによって満たされる。
本発明のこの態様による多様な実施形態では、その少なくとも1本のベルトは、基板よりも幅広い単一のベルトである。代わりに、その少なくとも1本のベルトは、基板よりも狭い単一のベルトである。いくつかの実施形態では、その少なくとも1本のベルトは、2本のベルトであり、その2本のベルトのそれぞれが基板の幅の半分よりも狭い。いくつかの実施形態では、保持器は、基板が保持器に対して固着することなく、基板を保持器から容易に取り外すことができるように上部に向かって傾斜している。いくつかの実施形態では、保持器は、単一の寸法で基板を位置合わせするように構成され、他の実施形態では、保持器は、2つの寸法で基板を位置合わせするように構成される。いくつかの実施形態では、ベルトは、方向的に摩擦のある面を有する。いくつかの実施形態では、その少なくとも1本のベルトは、基板の裏面表面積の約20パーセントを塞ぐにすぎない。
本発明の別の態様によると、輸送ベルト上で基板を位置合わせするための方法があり、その方法は、加速中に輸送ベルト上で基板を後方に摺動させるには不十分である第1の速度で輸送ベルトを加速するステップと、第1の速度よりも速い第2の速度で輸送ベルトを減速させ、第2の速度が減速中、輸送ベルト上で基板を前方に摺動させるのに十分であり、それによって連続する加速サイクルおよび減速サイクルの間に、輸送ベルト上に離間間隔で配置される保持器に対して基板を位置合わせするステップとを含む。
本発明の追加の利点は、より明確に詳細を示すほど縮尺どおりではない図とともに検討されるときに詳細な説明を参照することにより明らかになり、類似する参照番号は、いくつかの図を通して類似する要素を示す。
本発明の多様な実施形態は、太陽電池が、輸送ベルト上の既知の位置に従ってその上で製造される基板を配置し、それらの位置に基板を保持する。これは、特別に構成された搬送ベルトおよびその搬送ベルト用の運動コントローラの一方または両方によって達成される。
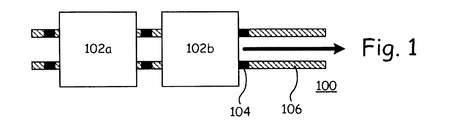
ここで図1を参照すると、本発明の実施形態による輸送システムの上面図が示されている。輸送システム100は、矢印で示される方向で基板102を移動するためにベルト106を使用する。図1の実施形態では、2本のベルト106が示されている。ただし、一本のベルト106から多くのベルト106まで、任意の数のベルト106が使用できることが理解される。
ここで図2を参照すると、ベルト106には、基板102は既知の位置にあるように、それに対して基板106を位置合わせできる保持器104が備えられる。運動コントローラ112は、ベルト106の非対称の加速および減速を実現する。これは、ベルト106を移動するモータ110の速度を制御することによって達成される。言い換えると、ベルト106の加速は、ベルト106の減速よりも低速である。
このようにして、基板102は、基板102aに関して示されるように、ベルト106の加速中、保持器104から離れて後方に摺動する傾向がある可能性があるが、ベルト106が示されている方向に移動するとき、基板102bに関して示されるように、ベルト106の減速中に保持器104に対して上方に摺動する傾向がより大きくなる。加速が十分に低速であると、基板102は全く保持器104から離れて摺動しない。同様に、減速が十分に高速である場合、基板102は、基板102が処理または検査のためにステーションで停止するときに、つねに保持器104に隣接するために上方へ摺動する。
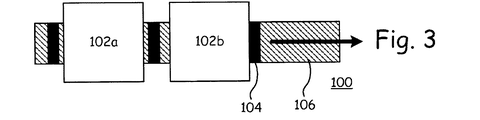
一実施形態では、保持器104は、基板102がベルト106から持ち上げられるときに詰まらないように傾斜している。図3は、1本のベルト106だけが使用される実施形態を示す。これまでに示された保持器104は、ベルト106の移動方向に従って一方向(1つの寸法)だけで基板102を位置合わせする傾向がある。
図4は、ベルト106が、基板102が前方に摺動を試みるときにベルト106と基板102の間により大きな摩擦係数があり、基板102が後方に摺動を試みるときにはベルト106と基板102の間の摩擦係数が削減されるように、ざらつきのある表面108を有する実施形態を示す。かかるざらつきのある表面108は、特許請求の範囲のために「方向的に摩擦のある面」として定められる。図4の実施形態では、このざらつきのある面は、材料の傾斜する尾根の形で設けられる。ただし、他のざらつきのある面もこの同じ機能性を提供できる。
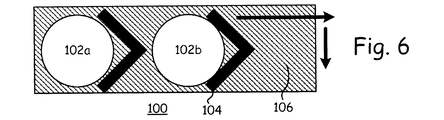
図5は、ベルト106が基板102よりも広い実施形態を示す。さらに、保持器104は、図中矢印で示されるように、運動の2つの直交方向(2つの寸法)で基板102を保持する働きをする構成部品を有する。図6は、基板が正方形の代わりに円形であり、保持器104が、運動の2つの直交方向で基板102を保持し、ベルト106上で基板102を中心に置く傾向のある実施形態を示す。したがって、本発明のための多岐に渡る実施形態が、本明細書で熟慮される。
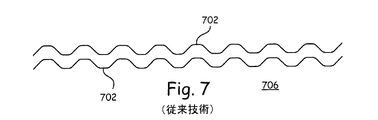
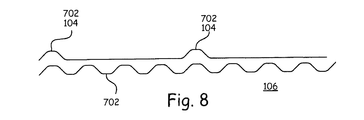
一実施形態では、ベルト106は、図7に示される市販の二重歯付きベルトから製造される。ベルト706は、ベルトのどちらかの側に置かれる歯付きで製造される。図7に示されるように、ベルト706は、ベルト106の上側で歯702の大部分を機械加工で取り去り(またはそれ以外の場合除去する)、保持器104の機能を果たす1本または複数の歯702を残すことによって改良される。ベルト106を形成するこの方法の利点は、それが実施するのが相対的に安価且つ容易であり、保持器104の位置を決定し、保持器104をベルト106面の上に接続するために必要とされる追加のステップがない点である。さらに、この方法は、ベルト106の初期製造の間の歯702の制御された位置決めのため、非常に正確な保持器104位置を提供する。さらに、歯702の表面特性は、上述されたように、保持器104に対して所望されるような外形に適合し、それらが非常に耐久性のあるように作り出される。
本発明の実施形態の前記説明は、図解および説明のために提示された。それは排他的となる、または開示される正確な形式に本発明を制限することを目的としていない。上記教示を鑑みて、明白な修正または変形が可能である。本実施形態は、本発明の原理およびその実際的な応用の図解を提供し、それによって当業者が多用な実施形態で、および熟慮されている特定の使用に適するような多様な変型を用いて本発明を活用できるようにするために選ばれ、説明される。かかる全ての変型および変形は、それらが、適正に、法律的におよび公平に与えられている広さに従って解釈されるときに、添付特許請求の範囲によって決定される本発明の範囲内にある。
Claims (20)
- 基板用輸送システムであって、
前記基板をその上で受け取るための少なくとも1本のベルトと、
前記ベルト上に離間距離で配置される保持器であって、前記離間距離が少なくとも前記基板の幅と同程度に幅広く、前記基板が前記保持器にぶつかるときに、前記基板が摺動するのを妨げるのに十分である、前記ベルト上方の隆起まで上昇する前記保持器と、
前記ベルトを移動するためのモータと、
前記ベルトが加速するより速く前記ベルトが減速するように、前記ベルトの非対称の加速および減速を提供し、それによって連続する加速サイクルおよび減速サイクルを通して前記基板を前記保持器に対して位置合わせするための運動コントローラと、
を備える輸送システム。 - 前記少なくとも1本のベルトが、前記基板よりも幅広い単一のベルトを備える、請求項1に記載の輸送システム。
- 前記少なくとも1本のベルトが、前記基板よりも狭い単一のベルトを備える、請求項1に記載の輸送システム。
- 前記少なくとも1本のベルトが2本のベルトを備え、前記2本のベルトのそれぞれが、前記基板の幅の半分よりも狭い、請求項1に記載の輸送システム。
- 前記基板が前記保持器に対して固着することなく、前記基板が前記ベルトから容易に取り外すことができるように、前記保持器が上部に向かって傾斜している、請求項1に記載の輸送システム。
- 前記保持器が、単一の寸法で前記基板を位置合わせするように構成される、請求項1に記載の輸送システム。
- 前記保持器が、2つの寸法で前記基板を位置合わせするように構成される、請求項1に記載の輸送システム。
- 前記ベルトが方向的に摩擦のある面を有する、請求項1に記載の輸送システム。
- 前記少なくとも1本のベルトが、前記基板のそれぞれの裏面表面積の約20パーセントを塞ぐに過ぎない、請求項1に記載の輸送システム。
- 基板用輸送システムであって、
前記基板をその上で受け取るための2本のベルトであって、前記2本のベルトのそれぞれが前記基板の幅の半分よりも狭い2本のベルトと、
前記ベルト上に離間距離で配置される保持器であって、前記離間距離が、前記基板の幅と少なくとも同程度に幅広く、前記保持器が、前記基板が前記保持器にぶつかるときに、前記基板が摺動するのを妨げるのに十分である前記ベルトの上方の隆起まで上昇し、前記基板が前記保持器に対して固着することなく、前記基板が前記ベルトから容易に取り外すことができるように、前記保持器が上部に向かって傾斜している、保持器と、
前記ベルトを移動するためのモータと、
前記ベルトが加速するよりも速く前記ベルトが減速するように、前記ベルトの非対称な加速および減速を提供し、それによって連続する加速サイクルおよび減速サイクルを通して、前記保持器に対して前記基板を位置合わせする、運動コントローラと、
を備える輸送システム。 - 前記保持器が、単一の方向で前記基板を位置合わせするように構成される、請求項10に記載の輸送システム。
- 前記保持器が、2つの寸法で前記基板を位置合わせするように構成される、請求項10に記載の輸送システム。
- 前記保持器が方向的に摩擦のある面を有する、請求項10に記載の輸送システム。
- 前記少なくとも1本のベルトが、前記基板のそれぞれの裏面表面積の約20パーセントを塞ぐに過ぎない、請求項10に記載の輸送システム。
- 輸送ベルト上で基板を位置合わせするための方法であって、
加速中に前記輸送ベルト上で前記基板を後方に摺動させるには不十分である第1の速度で前記輸送ベルトを加速するステップと、
前記第1の速度よりも速い第2の速度で前記輸送ベルトを減速し、前記第2の速度が、減速中に前記輸送ベルト上で前記基板を前方に摺動させるほど十分であり、それによって連続する加速サイクルおよび減速サイクルの間に、前記輸送ベルト上に離間間隔で配置される保持器に対して前記基板を位置合わせするステップと、
を含む方法。 - 前記輸送ベルトが2本のベルトを含み、前記2本のベルトのそれぞれが、前記基板の幅の半分よりも狭い、請求項15に記載の方法。
- 前記基板が前記保持器に対して固着することなく、前記基板が前記輸送ベルトから容易に取り外すことができるように、前記保持器が上部に向かって傾斜している、請求項15に記載の方法。
- 前記保持器が、単一の寸法で前記基板を位置合わせするように構成される、請求項15に記載の方法。
- 前記保持器が、2つの寸法で前記基板を位置合わせするように構成される、請求項15に記載の方法。
- 前記輸送ベルトが方向的に摩擦のある面を有する、請求項15に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18006009P | 2009-05-20 | 2009-05-20 | |
| US61/180,060 | 2009-05-20 | ||
| PCT/US2010/033484 WO2010135077A2 (en) | 2009-05-20 | 2010-05-04 | Solar cell transport |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012527770A true JP2012527770A (ja) | 2012-11-08 |
Family
ID=43126694
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012511875A Pending JP2012527770A (ja) | 2009-05-20 | 2010-05-04 | 太陽電池の輸送 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US8286785B2 (ja) |
| EP (1) | EP2433312A4 (ja) |
| JP (1) | JP2012527770A (ja) |
| KR (1) | KR20120016193A (ja) |
| CN (1) | CN102428576A (ja) |
| TW (1) | TW201104908A (ja) |
| WO (1) | WO2010135077A2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013086432A2 (en) * | 2011-12-07 | 2013-06-13 | Intevac, Inc. | High throughput load lock for solar wafers |
| JP6039260B2 (ja) * | 2012-06-21 | 2016-12-07 | 川崎重工業株式会社 | 基板搬送システム |
| WO2014163776A1 (en) * | 2013-03-13 | 2014-10-09 | Applied Materials, Inc. | Loadlock conveyor wafer holder design |
| CN103171860A (zh) * | 2013-03-28 | 2013-06-26 | 天津力神电池股份有限公司 | 电池外观检测传送装置 |
| DE102016009765B4 (de) * | 2016-08-11 | 2018-07-05 | Mühlbauer Gmbh & Co. Kg | Vorrichtung und Verfahren zum Übertragen eines elektronischen Bauteils von einem Träger zu einem Substrat |
| CN107845703A (zh) * | 2017-12-12 | 2018-03-27 | 博硕皓泽自动化设备无锡有限公司 | 一种电池串自动粘胶带双模组机构 |
| DE102019122839A1 (de) * | 2019-08-26 | 2021-03-04 | Miva Technologies Gmbh | Verfahren und Belichtungseinrichtung zur Belichtung eines lichtempfindlichen Aufzeichnungsträgers |
| CN112299013A (zh) * | 2020-11-20 | 2021-02-02 | 枣庄睿诺电子科技有限公司 | 玻璃基板传送装置及玻璃基板清洗装置 |
| KR102603520B1 (ko) * | 2021-03-12 | 2023-11-16 | 삼성물산 주식회사 | 태양광 발전 모듈 설치 지원 시스템 |
| DE102021114878A1 (de) | 2021-06-09 | 2022-12-15 | AMBEG-Dr.J.Dichter Gesellschaft mit beschränkter Haftung | Förderriemen und Förderer zum Liegendtransport von Glasbehältern |
| CN117691001A (zh) * | 2024-02-02 | 2024-03-12 | 晶科能源(海宁)有限公司 | 光伏组件层压机和光伏组件的层压方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3690437A (en) * | 1971-01-06 | 1972-09-12 | Kammann Fa Werner | Apparatus for aligning and arranging articles in upright position |
| US3894625A (en) * | 1972-08-24 | 1975-07-15 | Us Natural Resources | Lumber sorting system with overhead infeed |
| GB2150920B (en) * | 1983-11-28 | 1987-11-11 | Mead Corp | Equipment and method for feeding packaging blanks to a packaging machine |
| JPH06239440A (ja) * | 1993-02-18 | 1994-08-30 | Dainippon Screen Mfg Co Ltd | 基板搬送装置 |
| US6047430A (en) * | 1997-09-30 | 2000-04-11 | Gelco International L.L.C. | Battery plate feeding and handling apparatus |
| JP4030654B2 (ja) * | 1998-06-02 | 2008-01-09 | 大日本スクリーン製造株式会社 | 基板搬送装置 |
| IT1313117B1 (it) | 1999-08-25 | 2002-06-17 | Morton Int Inc | Apparecchiatura di applicazione a vuoto dotata di mezzi trasportatorie procedimento per applicare un resist a film secco ad un pannello di |
| CA2327601A1 (en) * | 2000-12-05 | 2002-06-05 | 2635-5727 Quebec Inc. | Turning device for lumber and the like |
| ITMI20022177A1 (it) * | 2002-10-14 | 2004-04-15 | Sitma Spa | Dispositivo e metodo di allineamento di prodotti in |
| JP4003184B2 (ja) * | 2003-04-23 | 2007-11-07 | シーケーディ株式会社 | 基板搬送装置 |
| US20050258019A1 (en) * | 2004-05-20 | 2005-11-24 | Tiberi Todd J | Method and apparatus for moving objects |
| JP4792364B2 (ja) * | 2006-09-29 | 2011-10-12 | 株式会社日立ハイテクインスツルメンツ | 基板搬送装置 |
| KR101138705B1 (ko) * | 2006-10-24 | 2012-04-19 | 삼성테크윈 주식회사 | 기판이송장치 |
| KR100898807B1 (ko) * | 2007-11-02 | 2009-05-22 | 한국기계연구원 | 기판이송장치 |
-
2010
- 2010-05-04 JP JP2012511875A patent/JP2012527770A/ja active Pending
- 2010-05-04 US US13/119,517 patent/US8286785B2/en not_active Expired - Fee Related
- 2010-05-04 KR KR1020117023825A patent/KR20120016193A/ko not_active Withdrawn
- 2010-05-04 EP EP10778100A patent/EP2433312A4/en not_active Withdrawn
- 2010-05-04 WO PCT/US2010/033484 patent/WO2010135077A2/en not_active Ceased
- 2010-05-04 CN CN201080021610XA patent/CN102428576A/zh active Pending
- 2010-05-13 TW TW099115344A patent/TW201104908A/zh unknown
-
2012
- 2012-09-25 US US13/625,992 patent/US8430234B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20130020180A1 (en) | 2013-01-24 |
| US8286785B2 (en) | 2012-10-16 |
| EP2433312A4 (en) | 2012-12-26 |
| US8430234B2 (en) | 2013-04-30 |
| KR20120016193A (ko) | 2012-02-23 |
| TW201104908A (en) | 2011-02-01 |
| US20120055761A1 (en) | 2012-03-08 |
| EP2433312A2 (en) | 2012-03-28 |
| WO2010135077A3 (en) | 2011-01-13 |
| CN102428576A (zh) | 2012-04-25 |
| WO2010135077A2 (en) | 2010-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012527770A (ja) | 太陽電池の輸送 | |
| US8764085B2 (en) | Clamping device and workpiece conveying robot | |
| US7661921B2 (en) | Semiconductor material handling system | |
| CN104520029B (zh) | 用于将工件部分卸除的方法以及机床 | |
| US20130334832A1 (en) | Reconfigurable Guide Pin Design for Centering Wafers Having Different Sizes | |
| CN101821845B (zh) | 用于盘形基片的夹持装置及其制造方法 | |
| JP2008108991A (ja) | ワーク保持機構 | |
| JP2006191121A5 (ja) | ||
| US20160049851A1 (en) | Magnet Inserting Apparatus for Magnet Insertion into Magnet Insertion Slots of Rotor Core and Method Thereof | |
| TW201606921A (zh) | 植入用遮罩及其對準 | |
| CN207595900U (zh) | 一种四工位转台 | |
| US9434076B2 (en) | Robot blade design | |
| JP2005052919A (ja) | ワーク搬送装置の加速度制御方法 | |
| US20130213171A1 (en) | Substrate transfer apparatus | |
| KR102272655B1 (ko) | 능동 기판 정렬 시스템 및 기판을 능동적으로 정렬하기 위한 방법 | |
| EP1850373A3 (en) | Method of forming highly orientated silicon film, method of manufacturing three-dimensional semiconductor device, and three-dimensional semiconductor device | |
| HK1169216A (en) | Solar cell transport | |
| JP5950604B2 (ja) | ワークホルダ及びワークセット方法 | |
| CN216104704U (zh) | 硅片移载机构 | |
| JPH01127538A (ja) | 板状物受け渡し装置 | |
| JP5988946B2 (ja) | Cvtベルト組立装置及びcvtベルトの組立方法 | |
| CN101378026B (zh) | 晶圆传送片 | |
| US12319020B2 (en) | Method of producing lens molded article | |
| US20260114232A1 (en) | Wafer transfer tool | |
| CN222720370U (zh) | 石墨舟输送装置及石墨舟装卸片机 |