JP2012250809A - 移載装置およびコンベア装置 - Google Patents
移載装置およびコンベア装置 Download PDFInfo
- Publication number
- JP2012250809A JP2012250809A JP2011124631A JP2011124631A JP2012250809A JP 2012250809 A JP2012250809 A JP 2012250809A JP 2011124631 A JP2011124631 A JP 2011124631A JP 2011124631 A JP2011124631 A JP 2011124631A JP 2012250809 A JP2012250809 A JP 2012250809A
- Authority
- JP
- Japan
- Prior art keywords
- roller
- shaft
- plane
- cam
- conveyor line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Landscapes
- Relays Between Conveyors (AREA)
Abstract
【課題】重量物を搬送するコンベア装置において、簡易な装置で、小馬力の電動モーターを用いて搬送物を分岐できる移載装置およびこの移載装置を用いたコンベア装置を提供する。
【解決手段】第1のコンベアラインの搬送方向の垂直な方向に平行配置される複数のローラからなるローラ群平面と、第2のコンベアラインの搬送方向に平行する2本のローラチェーンからなる平面と、これら2つの平面の下方に配置される複数のカム7とを備え、ローラ群平面の一辺がカム軸の回転により上死点または下死点となるとき、ローラチェーン平面が下死点または上死点となるカム群の組み合わせである。
【選択図】図3
【解決手段】第1のコンベアラインの搬送方向の垂直な方向に平行配置される複数のローラからなるローラ群平面と、第2のコンベアラインの搬送方向に平行する2本のローラチェーンからなる平面と、これら2つの平面の下方に配置される複数のカム7とを備え、ローラ群平面の一辺がカム軸の回転により上死点または下死点となるとき、ローラチェーン平面が下死点または上死点となるカム群の組み合わせである。
【選択図】図3
Description
この発明は移載装置およびコンベア装置に関する。
製品組み立てや、物品収納・仕分けに多用されているコンベア装置は、一方向のコンベアラインのみならず、途中で分岐するコンベアラインがあり、分岐部分において移載装置が配置されている。製品や物品などの搬送物は、一方向のコンベアラインから分岐して他方向のコンベアラインに移載装置により方向転換して搬送される。
従来、このような移載装置としては、行および列方向に格子状に配列された複数のローラと、これら複数のローラを昇降させる昇降部とを有し、この昇降部が昇降用動力源と、直線運動部材と、該直線運動部材の直線運動を回転運動に変換すると共に当該回転運動を昇降運動に変換してローラに伝導可能な複数の変換部材からなる移載装置が知られている(特許文献1)。
しかし、この移載装置は、格子状に配列された複数のローラ群、または、複数の変換部材を必要としており、機構が複雑になると共に、重量物の搬送が困難であるという問題がある。
従来、このような移載装置としては、行および列方向に格子状に配列された複数のローラと、これら複数のローラを昇降させる昇降部とを有し、この昇降部が昇降用動力源と、直線運動部材と、該直線運動部材の直線運動を回転運動に変換すると共に当該回転運動を昇降運動に変換してローラに伝導可能な複数の変換部材からなる移載装置が知られている(特許文献1)。
しかし、この移載装置は、格子状に配列された複数のローラ群、または、複数の変換部材を必要としており、機構が複雑になると共に、重量物の搬送が困難であるという問題がある。
また、電動リフト装置として、基台とこの基台に昇降支持したテーブルとの間にリフトアームを介装し、このリフトアームを電動モータにより回動させてテーブルを昇降させるときに、リフトアームを電動モータに対して両側に配置し、該電動モータの出力軸に両側対称に配置した動力伝達手段により回動させる電動リフト装置が知られている(特許文献2)。
しかし、この電動リフト装置は、平行に上下するテーブルが必要であり、また、このテーブルを上下に昇降させるには搬送物を持ち上げるための大きな駆動力を必要とする電動モータが必要であることから、特許文献1と同様に、重量物の搬送が困難であるという問題がある。
しかし、この電動リフト装置は、平行に上下するテーブルが必要であり、また、このテーブルを上下に昇降させるには搬送物を持ち上げるための大きな駆動力を必要とする電動モータが必要であることから、特許文献1と同様に、重量物の搬送が困難であるという問題がある。
本発明は、上記問題に対処するためになされたもので、重量物を搬送するコンベア装置において、簡易な装置で、小馬力の電動モーターを用いて搬送物を分岐できる移載装置およびこの移載装置を用いたコンベア装置の提供を目的とする。
本発明の移載装置は、第1のコンベアラインにより搬送される搬送物の搬送方向を変更する位置に配置されて、上記搬送物を第2のコンベアラインに移載させる移載装置であって、
該移載装置は、基台と、この基台上に配設され、上記第1のコンベアラインの搬送方向に対して垂直な方向に平行配置される複数のローラからなるローラ群と、上記第2のコンベアラインの搬送方向に平行配置される少なくとも2本のローラチェーンと、上記ローラ群が形成するローラ群平面および上記ローラチェーンが形成するローラチェーン平面の下方に配置されて、上記ローラ群平面および上記ローラチェーン平面を相互に連動させて昇降させる複数のカムとを備える。
該移載装置は、基台と、この基台上に配設され、上記第1のコンベアラインの搬送方向に対して垂直な方向に平行配置される複数のローラからなるローラ群と、上記第2のコンベアラインの搬送方向に平行配置される少なくとも2本のローラチェーンと、上記ローラ群が形成するローラ群平面および上記ローラチェーンが形成するローラチェーン平面の下方に配置されて、上記ローラ群平面および上記ローラチェーン平面を相互に連動させて昇降させる複数のカムとを備える。
上記ローラ群平面は、上記複数のローラの両端がローラフレームにより軸支され、一方のローラフレームが軸部により上記基台に回動自在に支持され、他方のローラフレームが上記カムの回転により上下動し、
上記ローラチェーン平面は、ローラチェーンの両端がローラ軸により軸支され、このローラ軸がローラチェーンフレームにより軸支され、上記ローラ群平面を形成する他方のローラフレーム側に位置するローラ軸が上記基台に回動自在に軸支され、他方のローラ軸が上記カムの回転により上下動し、
上記複数のカムは、上記他方のローラフレームがカム軸の回転により上死点または下死点となるとき、上記ローラチェーン平面の他方のローラ軸がカム軸の回転により、上記他方のローラフレームにそれぞれ対応して、下死点または上死点となるカム群の組み合わせであることを特徴とする。
上記ローラチェーン平面は、ローラチェーンの両端がローラ軸により軸支され、このローラ軸がローラチェーンフレームにより軸支され、上記ローラ群平面を形成する他方のローラフレーム側に位置するローラ軸が上記基台に回動自在に軸支され、他方のローラ軸が上記カムの回転により上下動し、
上記複数のカムは、上記他方のローラフレームがカム軸の回転により上死点または下死点となるとき、上記ローラチェーン平面の他方のローラ軸がカム軸の回転により、上記他方のローラフレームにそれぞれ対応して、下死点または上死点となるカム群の組み合わせであることを特徴とする。
本発明の移載装置において、第1のコンベアラインに平行配置される複数のローラからなるローラ群は、そのローラ群の少なくとも1つが駆動用ローラであり、残りのローラが該駆動用ローラの出力軸に連結される動力伝達手段により上記駆動用ローラと同一方向に回転することを特徴とする。
また、上記ローラチェーンの両端を軸支するローラ軸の少なくとも1つは駆動用ローラであることを特徴とする。
また、上記複数のカムは、1つの駆動モータの出力軸に連動するカム軸に固定されていることを特徴とする。
また、上記ローラチェーンの両端を軸支するローラ軸の少なくとも1つは駆動用ローラであることを特徴とする。
また、上記複数のカムは、1つの駆動モータの出力軸に連動するカム軸に固定されていることを特徴とする。
本発明のコンベア装置は、第1のコンベアラインにより搬送される搬送物の搬送方向を変更する位置に配置され、前記搬送物を第2のコンベアラインに移載させる上記本発明の移載装置を備えることを特徴とする。
本発明の移載装置は、ローラ群平面とローラチェーン平面とがカムの回転運動により、相互に連動して昇降するので、簡易な機構で第1のコンベアラインから第2のコンベアラインに搬送物を移載できる。また、ローラ群平面の一辺、およびローラチェーン平面の一辺がそれぞれ基台上に軸支され、他辺が自由端となりカムの回転運動により上下動するので、重量物の搬送物であっても小馬力の電動モータを用いて容易に搬送方向を変更して移載できる。
搬送物の移載の駆動力は駆動用ローラにより行なうので、省エネルギー、省スペースが実現できる。
搬送物の移載の駆動力は駆動用ローラにより行なうので、省エネルギー、省スペースが実現できる。
本発明の移載装置の一実施形態を図1〜図3により説明する。図1はコンベア装置の平面図である。
本発明の移載装置1は、第1のコンベアライン2により搬送される搬送物(図示を省略)の搬送方向を図面上下方向から図面右方向に変更する位置に配置されて、搬送物を第2のコンベアライン3に移載させる移載装置である。すなわち、搬送物を図中A点方向からB点位置へ搬入してC点方向へ搬出するか、または、C点方向からB点位置へ搬入してA点方向へ搬出する移載装置である。
また、第1のコンベアライン2から第2のコンベアライン3への移載は、必ずしも直角方向への移載ではなく、搬送物の搬送ができる範囲内での角度方向への分岐ができる。
第1および第2のコンベアラインはローラコンベアライン、ベルトコンベアライン等を採用できるが、重量の重い搬送物を搬送するのに適しているローラコンベアラインが好ましい。また移載の方向は図1に示すT字型以外に、L字型、十字型であってもよい。
本発明の移載装置1は、第1のコンベアライン2により搬送される搬送物(図示を省略)の搬送方向を図面上下方向から図面右方向に変更する位置に配置されて、搬送物を第2のコンベアライン3に移載させる移載装置である。すなわち、搬送物を図中A点方向からB点位置へ搬入してC点方向へ搬出するか、または、C点方向からB点位置へ搬入してA点方向へ搬出する移載装置である。
また、第1のコンベアライン2から第2のコンベアライン3への移載は、必ずしも直角方向への移載ではなく、搬送物の搬送ができる範囲内での角度方向への分岐ができる。
第1および第2のコンベアラインはローラコンベアライン、ベルトコンベアライン等を採用できるが、重量の重い搬送物を搬送するのに適しているローラコンベアラインが好ましい。また移載の方向は図1に示すT字型以外に、L字型、十字型であってもよい。
図2は移載装置を示す図であり、図2(a)は平面図を、図2(b)は側面図を、図2(c)は図2(a)のA−A断面図を、図2(d)は図2(b)のB−B断面図を、図2(e)は図2(b)のC−C断面図をそれぞれ示す。
移載装置1は、基台4上にローラ群5と、ローラチェーン6と、カム7とを備えている。
ローラ群5は、第1のコンベアライン2の搬送方向に対して垂直な方向に平行配置される複数のローラ5a、5bから構成され、ローラ群5により1つの平面を形成している。ローラ群5はローラフレーム5cおよび5dにより軸支されている。ローラフレーム5cの両端部5c’は、基台4に設けられたヒンジブラケット4aに軸5gでローラフレーム5cの下部に設けられたブラケット5hを介して回動自在に軸支されている。また、ローラフレーム5dの両端部5d’は、カム7aの回転により上下動する。
移載装置1は、基台4上にローラ群5と、ローラチェーン6と、カム7とを備えている。
ローラ群5は、第1のコンベアライン2の搬送方向に対して垂直な方向に平行配置される複数のローラ5a、5bから構成され、ローラ群5により1つの平面を形成している。ローラ群5はローラフレーム5cおよび5dにより軸支されている。ローラフレーム5cの両端部5c’は、基台4に設けられたヒンジブラケット4aに軸5gでローラフレーム5cの下部に設けられたブラケット5hを介して回動自在に軸支されている。また、ローラフレーム5dの両端部5d’は、カム7aの回転により上下動する。
ローラ5を構成するローラ5aは駆動用ローラであり、その他の残りのローラ5bは従動ローラである。駆動用ローラとしては、小馬力の電動モータローラを挙げることができる。
駆動用ローラ5aの出力軸に設けられるスプロケット5eと、ローラ5bに設けられているスプロケット5e間に巻き掛けられているチェーン5fにより、駆動用ローラ5aの出力軸の回転がローラ5bに伝達され、駆動用ローラ5aとローラ5bとは同一方向に回転する。
駆動用ローラ5aとしてモータローラを使用することで、駆動ベースが不要となり、ローラ群5の下方に複数のカムを配置することができ、省スペース設計が可能となる。また、モータローラのモータは直流モータ、交流モータを使用できる。特に直流モータを使用することにより、消費電力を削減することができ、モータ制御が容易となる。
駆動用ローラ5aの出力軸に設けられるスプロケット5eと、ローラ5bに設けられているスプロケット5e間に巻き掛けられているチェーン5fにより、駆動用ローラ5aの出力軸の回転がローラ5bに伝達され、駆動用ローラ5aとローラ5bとは同一方向に回転する。
駆動用ローラ5aとしてモータローラを使用することで、駆動ベースが不要となり、ローラ群5の下方に複数のカムを配置することができ、省スペース設計が可能となる。また、モータローラのモータは直流モータ、交流モータを使用できる。特に直流モータを使用することにより、消費電力を削減することができ、モータ制御が容易となる。
2本のローラチェーン6が第2のコンベアライン3の搬送方向に平行する方向に配置され、この2本のローラチェーン6により1つのローラチェーン平面を形成する。ローラチェーン平面の断面を図2(c)に示す。
ローラチェーン平面は、無端状のローラチェーン6の一端がローラ軸6aのスプロケットに、他端6bがローラチェーン6が掛け渡されるスプロケットに、それぞれ掛け渡されて1つの平面を形成している。ローラ軸6aの両端部6a’は、基台4に設けられたヒンジブラケット4bに軸6cで回動自在に軸支されている。また、ローラチェーンの他端6b、6bは、カム7bの回転により同時に上下動する。
なお、ローラ軸6aは駆動用ローラである。
ローラチェーン平面は、無端状のローラチェーン6の一端がローラ軸6aのスプロケットに、他端6bがローラチェーン6が掛け渡されるスプロケットに、それぞれ掛け渡されて1つの平面を形成している。ローラ軸6aの両端部6a’は、基台4に設けられたヒンジブラケット4bに軸6cで回動自在に軸支されている。また、ローラチェーンの他端6b、6bは、カム7bの回転により同時に上下動する。
なお、ローラ軸6aは駆動用ローラである。
ローラ群平面およびローラチェーン平面の下方に複数のカム7が配置され、ローラ群平面およびローラチェーン平面を相互に連動させて昇降させる。ローラ群平面により搬送物が移動されるときはローラチェーン平面が搬送物に接しないように下方に、ローラチェーン平面により搬送物が移動されるときはローラ群平面が搬送物に接しないように下方にそれぞれ位置するように、カム7の形状が設定されている。
カム7は、図2(d)に示すように、1つの駆動モータ8の出力軸に設けられるスプロケット8aと、カム軸7cに設けられているスプロケット8c間に掛け渡されているチェーン8bにより、駆動モータ8の出力軸の回転がカム軸7cに固定されているカム7a、7bに伝達される。
カム7の形状は、ローラフレーム5dがカム軸7cの回転により上死点となるとき、ローラ軸6bがカム軸7cの回転により下死点となるカム群の組み合わせである。
カム7の形状は、ローラフレーム5dがカム軸7cの回転により上死点となるとき、ローラ軸6bがカム軸7cの回転により下死点となるカム群の組み合わせである。
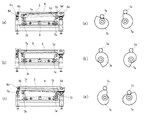
以下、図1に示す、第1のコンベアライン2のA点方向から移載装置1のB点位置へ搬送物を搬入して、B点位置から第2のコンベアライン3のC点方向へ搬出する場合の動作について図3により説明する。
図示を省略した搬送物はローラ2aにより、移載装置1のB点位置へ搬入される。搬入時の移載装置1を図3(a)に、そのときのカムの動きを図3(a’)に示す。
搬入時には、カム7aおよび7bは駆動モータ8の回転に従動して回転し、カム7bに接しているカムフォロア7eが上下動の下死点となる。このカムフォロア7eをガイドローラとするブラケット6dに固定されているローラチェーン6の端部6bは、ローラ群を軸支するローラフレーム5cよりも下方に位置する。また、カム7aに接しているカムフォロア7dが上死点となる。このカムフォロア7dをガイドローラとするブラケット5iに固定されているローラフレーム5dがローラチェーン平面よりも上方に位置する。カム機構を上記のように設定することで、ローラチェーン6により形成されるローラチェーン平面を、ローラ群5が形成する平面よりも下面に位置させる。具体的にはローラ群5が形成する平面を第1のコンベアライン2の平面と略同一の平面に設定して、ローラチェーン6が形成する平面はローラ軸6aを回転軸として、図3(a)において、左下がりの斜面となる。
図示を省略した搬送物はローラ2aにより、移載装置1のB点位置へ搬入される。搬入時の移載装置1を図3(a)に、そのときのカムの動きを図3(a’)に示す。
搬入時には、カム7aおよび7bは駆動モータ8の回転に従動して回転し、カム7bに接しているカムフォロア7eが上下動の下死点となる。このカムフォロア7eをガイドローラとするブラケット6dに固定されているローラチェーン6の端部6bは、ローラ群を軸支するローラフレーム5cよりも下方に位置する。また、カム7aに接しているカムフォロア7dが上死点となる。このカムフォロア7dをガイドローラとするブラケット5iに固定されているローラフレーム5dがローラチェーン平面よりも上方に位置する。カム機構を上記のように設定することで、ローラチェーン6により形成されるローラチェーン平面を、ローラ群5が形成する平面よりも下面に位置させる。具体的にはローラ群5が形成する平面を第1のコンベアライン2の平面と略同一の平面に設定して、ローラチェーン6が形成する平面はローラ軸6aを回転軸として、図3(a)において、左下がりの斜面となる。
搬送物は移載装置1に搬入されB点で停止する。この搬送物の搬入・停止は、移載装置1に設けられている駆動用ローラ5aの回転・停止により容易に行なうことができる。
停止時のカム7は図3(b’)に示す位置まで回転し、ローラ群5が形成する平面およびローラチェーン平面が略同一平面となる図3(b)。このとき、搬送物の搬送方向は搬入時の方向である。
停止時のカム7は図3(b’)に示す位置まで回転し、ローラ群5が形成する平面およびローラチェーン平面が略同一平面となる図3(b)。このとき、搬送物の搬送方向は搬入時の方向である。
図3(b’)に示す位置からカム7aおよび7bが同時に回転して、カム7bに接しているカムフォロア7eが上死点となることにより、このカムフォロア7eをガイドローラとするブラケット6dに固定されているローラチェーン6の端部6bがローラ群を軸支するローラフレーム5cよりも同一の高さになるか、または僅かに上方に位置する。同時に、カム7aに接しているカムフォロア7dが下死点となる。その結果、このカムフォロア7dをガイドローラとするブラケット5iに固定されているローラフレーム5dがローラチェーン平面よりも下方に位置する。具体的にはローラチェーン6が形成する平面を第1のコンベアライン2および第2のコンベアライン3の平面と略同一の平面に設定して、ローラ群5が形成する平面は、ローラフレーム5cに連結している軸5gを回転軸として、図3(c)において、右下がりの斜面となる。
カム7の動きにより、ローラチェーン6で形成される平面がローラ群5により形成される平面よりも上面に位置する状態となる。この状態で駆動用ローラであるローラ軸6aを駆動することにより、搬送物はB点位置から第2のコンベアライン3のC点方向へローラチェーン6の回転により移動する。
カム7の動きにより、ローラチェーン6で形成される平面がローラ群5により形成される平面よりも上面に位置する状態となる。この状態で駆動用ローラであるローラ軸6aを駆動することにより、搬送物はB点位置から第2のコンベアライン3のC点方向へローラチェーン6の回転により移動する。
本発明の移載装置は、ローラ群5により形成される平面、およびローラチェーン6で形成される平面が、それぞれ平面視四角形の一辺を軸支して、この軸支されている一辺の対辺がカム機構により上下動する。この上下動により、ローラ群5により形成される平面とローラチェーン6で形成される平面とが順に搬送物に接する。その結果、第1のコンベアライン2から第2のコンベアライン3に搬送物を移載できる。各平面の上下動は、カム機構により行なうが、四角形の一辺が軸支されているので、最大でも搬送物の重量の1/2の重量で移載できる。このため、電動リフト装置などを用いて搬送物を上下動させる移載装置に比較して、重量搬送物の移載が可能となる。
本発明のコンベア装置は、上記本発明の移載装置と従来のコンベアラインとを組み合わせることで、分岐をもったコンベア装置を容易に構成できる。また、本発明の移載装置は実質的に搬送物の高さを変更しないので、従来のコンベアラインとの組み合わせが容易にできる。特に、高トルクの直流モータを駆動源とするコンベアラインと組み合わせることが、電源および制御システムを共用できるので好ましい。
本発明の移載装置は、簡易な機構で第1のコンベアラインから第2のコンベアラインに重量物の搬送物を移載できるので、多くの搬送システムに利用できる。また、移載装置自身に駆動源を有し、省エネルギー、省スペースであると共に、移載時の高さ変動が少ないので精密部品、割れやすい搬送物なの搬送システムに利用できる。
1 移載装置
2 第1のコンベアライン
3 第2のコンベアライン3
4 基台
5 ローラ群
6 ローラチェーン
7 カム
8 駆動モータ
2 第1のコンベアライン
3 第2のコンベアライン3
4 基台
5 ローラ群
6 ローラチェーン
7 カム
8 駆動モータ
Claims (5)
- 第1のコンベアラインにより搬送される搬送物の搬送方向を変更する位置に配置されて、前記搬送物を第2のコンベアラインに移載させる移載装置であって、
該移載装置は、基台と、この基台上に配設され、前記第1のコンベアラインの搬送方向に対して垂直な方向に平行配置される複数のローラからなるローラ群と、前記第2のコンベアラインの搬送方向に平行配置される少なくとも2本のローラチェーンと、前記ローラ群が形成するローラ群平面および前記ローラチェーンが形成するローラチェーン平面の下方に配置されて、前記ローラ群平面および前記ローラチェーン平面を相互に連動させて昇降させる複数のカムとを備え、
前記ローラ群平面は、前記複数のローラの両端がローラフレームにより軸支され、一方のローラフレームが軸部により前記基台に回動自在に支持され、他方のローラフレームが前記カムの回転により上下動し、
前記ローラチェーン平面は、ローラチェーンの両端がローラ軸により軸支され、このローラ軸がローラチェーンフレームにより軸支され、前記ローラ群平面を形成する他方のローラフレーム側に位置するローラ軸が前記基台に回動自在に軸支され、他方のローラ軸が前記カムの回転により上下動し、
前記複数のカムは、前記他方のローラフレームがカム軸の回転により上死点または下死点となるとき、前記ローラチェーン平面の他方のローラ軸がカム軸の回転により、前記他方のローラフレームにそれぞれ対応して、下死点または上死点となるカム群の組み合わせであることを特徴とする移載装置。 - 前記ローラ群の少なくとも1つは駆動用ローラであり、残りのローラは前記駆動用ローラの出力軸に連結される動力伝達手段により前記駆動用ローラと同一方向に回転することを特徴とする請求項1記載の移載装置。
- 前記ローラチェーンの両端を軸支するローラ軸の少なくとも1つは駆動用ローラであることを特徴とする請求項1または2記載の移載装置。
- 前記複数のカムは、1つの駆動モータの出力軸に連動するカム軸に固定されていることを特徴とする請求項1、請求項2または請求項3記載の移載装置。
- 第1のコンベアラインにより搬送される搬送物の搬送方向を変更する位置に配置され、前記搬送物を第2のコンベアラインに移載させる移載装置を備えたコンベア装置であって、
前記移載装置が請求項1ないし請求項4のいずれか1項記載の移載装置であることを特徴とするコンベア装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124631A JP2012250809A (ja) | 2011-06-02 | 2011-06-02 | 移載装置およびコンベア装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124631A JP2012250809A (ja) | 2011-06-02 | 2011-06-02 | 移載装置およびコンベア装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012250809A true JP2012250809A (ja) | 2012-12-20 |
Family
ID=47523998
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011124631A Withdrawn JP2012250809A (ja) | 2011-06-02 | 2011-06-02 | 移載装置およびコンベア装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012250809A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015129803A1 (ja) * | 2014-02-28 | 2015-09-03 | 伊東電機株式会社 | 搬送装置及びコンベア装置 |
| KR20170089440A (ko) * | 2015-02-11 | 2017-08-04 | 명순승 | 식판투입기에 구비된 식판승강공급장치 |
| DE102017107505A1 (de) * | 2017-04-07 | 2018-10-11 | Jungheinrich Aktiengesellschaft | Hubwerk |
| DE102018204644A1 (de) * | 2018-03-27 | 2019-10-02 | Robert Bosch Gmbh | Hub- und Fördervorrichtung und Streckenförderer mit der Hub- und Fördervorrichtung |
| CN116476278A (zh) * | 2023-04-27 | 2023-07-25 | 佛山市众鑫泰塑胶制品有限公司 | 一种节能型塑胶制品加工用送料设备 |
-
2011
- 2011-06-02 JP JP2011124631A patent/JP2012250809A/ja not_active Withdrawn
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015129803A1 (ja) * | 2014-02-28 | 2015-09-03 | 伊東電機株式会社 | 搬送装置及びコンベア装置 |
| JPWO2015129803A1 (ja) * | 2014-02-28 | 2017-03-30 | 伊東電機株式会社 | 搬送装置及びコンベア装置 |
| US9878857B2 (en) | 2014-02-28 | 2018-01-30 | Itoh Denki Co., Ltd. | Transportation device and conveyor device |
| KR20170089440A (ko) * | 2015-02-11 | 2017-08-04 | 명순승 | 식판투입기에 구비된 식판승강공급장치 |
| KR101894838B1 (ko) * | 2015-02-11 | 2018-09-05 | 명순승 | 식판투입기에 구비된 식판승강공급장치 |
| DE102017107505A1 (de) * | 2017-04-07 | 2018-10-11 | Jungheinrich Aktiengesellschaft | Hubwerk |
| DE102018204644A1 (de) * | 2018-03-27 | 2019-10-02 | Robert Bosch Gmbh | Hub- und Fördervorrichtung und Streckenförderer mit der Hub- und Fördervorrichtung |
| US10669100B2 (en) | 2018-03-27 | 2020-06-02 | Robert Bosch Gmbh | Lifting and conveying device and section conveyor having the lifting and conveying device |
| CN116476278A (zh) * | 2023-04-27 | 2023-07-25 | 佛山市众鑫泰塑胶制品有限公司 | 一种节能型塑胶制品加工用送料设备 |
| CN116476278B (zh) * | 2023-04-27 | 2024-02-02 | 南雄市金叶包装材料有限公司 | 一种节能型塑胶制品加工用送料设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN204727040U (zh) | 一种中空式双层轻载皮带线 | |
| CN104828459A (zh) | 一种中空式双层轻载皮带线 | |
| JP6140468B2 (ja) | 被搬送物の方向転換装置 | |
| KR102184615B1 (ko) | 반송 장치 | |
| JP6140467B2 (ja) | 被搬送物の方向転換装置 | |
| JP2012250809A (ja) | 移載装置およびコンベア装置 | |
| KR20120106618A (ko) | 물품 반송 설비 | |
| KR102401197B1 (ko) | 롤러 조립체를 갖는 컨베이어 시스템 | |
| KR101424090B1 (ko) | 버섯재배 자동화 시스템 | |
| KR20140061242A (ko) | 물품 반송 장치 및 이것을 구비한 물품 수납 설비 | |
| CN107555078A (zh) | 一种医院物流输送系统 | |
| JP2011006166A (ja) | 移載装置 | |
| TWI661987B (zh) | 雙向輸送裝置、電池包存放臺、換電小車及換電平臺輸送線 | |
| JP3163939U (ja) | 搬送装置 | |
| JP2018030680A (ja) | 移載装置 | |
| TWM394979U (en) | The mechanism for eliminating the bottleneck in transporting flat and thin work piece in optoelectronic industry | |
| JP2024058483A (ja) | 昇降搬送装置 | |
| JP4189478B2 (ja) | 搬送装置 | |
| JP2017226506A (ja) | 昇降搬送装置 | |
| JP2017197306A (ja) | 移載装置、並びに、搬送装置 | |
| KR101057791B1 (ko) | 4방향 물류 리프터 | |
| KR101547323B1 (ko) | 오버헤드 호이스트 이송장치의 슬라이드 유닛 | |
| JP5859226B2 (ja) | 昇降装置 | |
| CN207329493U (zh) | 一种医院物流输送系统 | |
| KR101173120B1 (ko) | 천정 주행차 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |