JP2012240444A - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP2012240444A JP2012240444A JP2011109369A JP2011109369A JP2012240444A JP 2012240444 A JP2012240444 A JP 2012240444A JP 2011109369 A JP2011109369 A JP 2011109369A JP 2011109369 A JP2011109369 A JP 2011109369A JP 2012240444 A JP2012240444 A JP 2012240444A
- Authority
- JP
- Japan
- Prior art keywords
- driving force
- vehicle body
- rear wheel
- front wheel
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Abstract
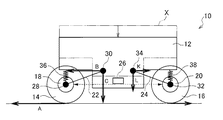
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
【選択図】図1
Description
12 車体
14 前輪
16 後輪
18 前輪電動モータ(前輪駆動力付与手段の一例)
20 後輪電動モータ(後輪駆動力付与手段の一例)
22 前輪サスペンション(前輪車体接続手段の一例)
24 後輪サスペンション(後輪車体接続手段の一例)
26 調整手段
36 前輪コイルバネ
38 後輪コイルバネ
Claims (3)
- 車体と、
前記車体の進行方向前側に設けられる前輪と、
前記車体の進行方向後側に設けられる後輪と、
前記前輪に駆動力を付与する前輪駆動力付与手段と、
前記後輪に駆動力を付与する後輪駆動力付与手段と、
前記前輪駆動力付与手段によって前記前輪に前記車体を前進させる正方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向下向きの荷重が前記車体に生じるように、前記前輪と前記車体とを接続する前輪車体接続手段と、
前記後輪駆動力付与手段によって前記後輪に前記車体を前進させる正方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向上向きの荷重が前記車体に生じるように、前記後輪と前記車体とを接続する後輪車体接続手段と、
前記前輪車体接続手段および前記後輪車体接続手段を通じて前記車体に重力方向における所定の荷重が生じるように、前記前輪駆動力付与手段が前記前輪に付与する正方向の駆動力の大きさおよび前記後輪駆動力付与手段が前記後輪に付与する正方向の駆動力の大きさを調整する調整手段と、
を有する車両。 - 車体と、
前記車体の進行方向前側に設けられる前輪と、
前記車体の進行方向後側に設けられる後輪と、
前記前輪に駆動力を付与する前輪駆動力付与手段と、
前記後輪に駆動力を付与する後輪駆動力付与手段と、
前記前輪駆動力付与手段によって前記前輪に前記車体を前進させる正方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向下向きの荷重が前記車体に生じる一方、前記前輪駆動力付与手段によって前記前輪に前記正方向とは反対方向の負方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向上向きの荷重が前記車体に生じるように、前記前輪と前記車体とを接続する前輪車体接続手段と、
前記後輪駆動力付与手段によって前記後輪に前記車体を前進させる正方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向上向きの荷重が前記車体に生じる一方、前記後輪駆動力付与手段によって前記後輪に前記正方向とは反対方向の負方向の駆動力が付与されているときに付与されている駆動力の大きさに応じた重力方向下向きの荷重が前記車体に生じるように、前記後輪と前記車体とを接続する後輪車体接続手段と、
前記前輪車体接続手段および前記後輪車体接続手段を通じて前記車体に重力方向における所定の荷重が生じるように、前記前輪駆動力付与手段が前記前輪に付与する駆動力の方向と大きさおよび前記後輪駆動力付与手段が前記後輪に付与する駆動力の方向と大きさを調整する調整手段と、
を有し、
前記調整手段は、前記前輪車体接続手段および前記後輪車体接続手段を通じて前記車体に重力方向における所定の荷重を生じさせるに際し、前記前輪駆動力付与手段が前記前輪に付与する駆動力の方向と前記後輪駆動力付与手段が前記後輪に付与する駆動力の方向とを逆向きとする車両。 - 前記前輪車体接続手段は、前記前輪との接続箇所が前記車体との接続箇所に対して進行方向前側とされるリーディングアーム式サスペンションである一方、前記後輪車体接続手段は、前記後輪との接続箇所が前記車体との接続箇所に対して進行方向後側とされるトレーリングアーム式サスペンションである請求項1または請求項2に記載の車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011109369A JP2012240444A (ja) | 2011-05-16 | 2011-05-16 | 車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011109369A JP2012240444A (ja) | 2011-05-16 | 2011-05-16 | 車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012240444A true JP2012240444A (ja) | 2012-12-10 |
Family
ID=47462622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011109369A Pending JP2012240444A (ja) | 2011-05-16 | 2011-05-16 | 車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012240444A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019038415A (ja) * | 2017-08-25 | 2019-03-14 | 株式会社Subaru | 車両の制御装置 |
| JP2021043147A (ja) * | 2019-09-13 | 2021-03-18 | いすゞ自動車株式会社 | 重量推定装置および車両 |
| JP2021041896A (ja) * | 2019-09-13 | 2021-03-18 | いすゞ自動車株式会社 | 車両 |
| JP2021049865A (ja) * | 2019-09-25 | 2021-04-01 | いすゞ自動車株式会社 | 車両 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS632712A (ja) * | 1986-06-23 | 1988-01-07 | Mazda Motor Corp | 水陸両用車の車輪引上げ装置 |
| JPH0899517A (ja) * | 1994-09-30 | 1996-04-16 | Suzuki Motor Corp | 車両の後輪懸架装置 |
| JPH09286348A (ja) * | 1996-04-22 | 1997-11-04 | Honda Motor Co Ltd | 小型車両 |
| JP2004306733A (ja) * | 2003-04-04 | 2004-11-04 | Hitachi Ltd | 車両用懸架装置、車体姿勢制御方法及びその装置 |
| JP2006217712A (ja) * | 2005-02-02 | 2006-08-17 | Mitsubishi Motors Corp | 電気自動車の車両制御装置 |
| JP2009173089A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 車両の制御装置 |
-
2011
- 2011-05-16 JP JP2011109369A patent/JP2012240444A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS632712A (ja) * | 1986-06-23 | 1988-01-07 | Mazda Motor Corp | 水陸両用車の車輪引上げ装置 |
| JPH0899517A (ja) * | 1994-09-30 | 1996-04-16 | Suzuki Motor Corp | 車両の後輪懸架装置 |
| JPH09286348A (ja) * | 1996-04-22 | 1997-11-04 | Honda Motor Co Ltd | 小型車両 |
| JP2004306733A (ja) * | 2003-04-04 | 2004-11-04 | Hitachi Ltd | 車両用懸架装置、車体姿勢制御方法及びその装置 |
| JP2006217712A (ja) * | 2005-02-02 | 2006-08-17 | Mitsubishi Motors Corp | 電気自動車の車両制御装置 |
| JP2009173089A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 車両の制御装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019038415A (ja) * | 2017-08-25 | 2019-03-14 | 株式会社Subaru | 車両の制御装置 |
| JP7164940B2 (ja) | 2017-08-25 | 2022-11-02 | 株式会社Subaru | 車両の制御装置 |
| JP2021043147A (ja) * | 2019-09-13 | 2021-03-18 | いすゞ自動車株式会社 | 重量推定装置および車両 |
| JP2021041896A (ja) * | 2019-09-13 | 2021-03-18 | いすゞ自動車株式会社 | 車両 |
| JP7131515B2 (ja) | 2019-09-13 | 2022-09-06 | いすゞ自動車株式会社 | 重量推定装置および車両 |
| JP2021049865A (ja) * | 2019-09-25 | 2021-04-01 | いすゞ自動車株式会社 | 車両 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4887771B2 (ja) | 走行装置 | |
| JP4179348B2 (ja) | 走行装置 | |
| KR101861391B1 (ko) | 전방향 휠 조립체 및 전방향 차량 | |
| JP4839778B2 (ja) | 車両の制御装置 | |
| CA2658310A1 (en) | Inverted wheel type moving body and method of controlling the same | |
| JP4844407B2 (ja) | 走行装置 | |
| CN104812612A (zh) | 车辆控制装置 | |
| JP2015071362A (ja) | 車両の制駆動力制御装置 | |
| JP2016107778A (ja) | 車両の制御装置 | |
| JP5862273B2 (ja) | 車両挙動制御装置 | |
| JP2009273275A (ja) | 車両の制御装置 | |
| JP2012240444A (ja) | 車両 | |
| US20170106755A1 (en) | Vehicle control apparatus | |
| JP2009173089A (ja) | 車両の制御装置 | |
| CN109278858A (zh) | 具有稳定性控制的电驱动刚性后轴总成 | |
| JP4887719B2 (ja) | 車両の制御装置 | |
| JP4058539B2 (ja) | 車両 | |
| JP2007030567A (ja) | 制御装置及び車両 | |
| CN104309429A (zh) | 一种四轮环保电动车 | |
| JP4058538B2 (ja) | 車両 | |
| JP2009184522A (ja) | 車両の振動抑制装置 | |
| CN106573659A (zh) | 具有提高的转弯稳定性的两轮车辆 | |
| CN107848351B (zh) | 车辆 | |
| JP2008239102A (ja) | 車両用制御装置及び車両 | |
| KR20150018010A (ko) | 회생 제동을 이용한 하이브리드 차량의 자세 제어 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121102 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130617 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130801 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140507 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140514 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20140627 |